基于分層粒子群優(yōu)化的三維點云配準(zhǔn)
2021-07-07 02:42:42黃筱佟溫佩芝蕭華鵬邸臻煒
濟(jì)南大學(xué)學(xué)報(自然科學(xué)版) 2021年4期
關(guān)鍵詞:特征
黃筱佟,溫佩芝,蕭華鵬,賀 杰,邸臻煒
(1.梧州學(xué)院 a.廣西高校圖像處理與智能信息系統(tǒng)重點實驗室,b.大數(shù)據(jù)與軟件工程學(xué)院,廣西 梧州 543002;2.桂林電子科技大學(xué) 計算機(jī)與信息安全學(xué)院,廣西 桂林 541004;3.廣西師范大學(xué) 物理科學(xué)與技術(shù)學(xué)院,廣西 桂林 541004)
隨著圖像技術(shù)的發(fā)展,借助圖像數(shù)據(jù)挖掘獲取有價值數(shù)據(jù)的方法在多個行業(yè)廣泛應(yīng)用,并且取得了良好的效果。當(dāng)前的圖像數(shù)據(jù)研究多是基于二維的,三維圖像的研究主要集中在圖像的建模和重構(gòu),攝像機(jī)從不同角度對同一實體拍攝圖像數(shù)據(jù),根據(jù)這些圖像還原實體空間結(jié)構(gòu)[1]。由于拍攝時受到背景、光線和噪聲等的影響,因此根據(jù)多張二維圖像重構(gòu)三維實體的過程并不簡單。當(dāng)前三維圖像重構(gòu)采用的主要手段為三維點云配準(zhǔn),即通過攝像機(jī)對實體表面的多角度二維圖像的采集,獲得圖像點云,根據(jù)二維圖像所包含的點云RGB三原色和坐標(biāo)值、點云與攝像機(jī)的距離值[2]等獲取三維實體有效特征,去除多個二維圖像包含的冗余特征,將多個圖像點云平移變換至同一坐標(biāo)系。
對于三維點云配準(zhǔn)的研究成果較多。文獻(xiàn)[3]中采用八叉樹實現(xiàn)大規(guī)模點云樣本的配準(zhǔn),點云的坐標(biāo)變換結(jié)合了鄰居節(jié)點拓?fù)洹N墨I(xiàn)[4]中將遺傳算法運用于點云配準(zhǔn),并運用熵值計算點的關(guān)聯(lián)性,兩者均取得了較好的配準(zhǔn)效果。在小規(guī)模的點云數(shù)據(jù)匹配過程中,迭代最近點(iterative closest point,ICP)算法可以獲得較好的匹配準(zhǔn)確度,而且效率較高[5]。由于在進(jìn)行較大實體的重建過程中,需要處理數(shù)量龐大的數(shù)據(jù)點云配準(zhǔn),標(biāo)準(zhǔn)ICP算法會消耗大量的配準(zhǔn)時間,因此,本文中在標(biāo)準(zhǔn)ICP算法的基礎(chǔ)上,引入分層粒子群優(yōu)化 (PSO)算法,以提高配準(zhǔn)的效率。
1 ICP 算法
ICP算法在參考點云pi(i為粒子序號)和目標(biāo)點云qi之間進(jìn)行最近點搜索,對N個點進(jìn)行連續(xù)的坐標(biāo)變換,以更接近于目標(biāo)點云位置。最近點搜索評價指標(biāo)為所有pi與qi的距離差的平均值f(R,T)[6],即
(1)
式中R、T分別為坐標(biāo)變化的選擇和平移操作。當(dāng)求解的f(R,T)值滿足設(shè)定的閾值時,算法停止。
設(shè)參考點云P和目標(biāo)點云Q滿足P={pi|pi∈3,i=1,2,…,M},M為參考點個數(shù),Q={qj|qj∈3,j=1,2,…,N},在Q中尋找與pi最近的qj,它們之間的距離d(P,Q)的計算公式為
(2)
對P中所有的點尋找最近點,構(gòu)成Y=C(P,Q),其中C為映射函數(shù)。
為了對參考點云中所有點進(jìn)行距離評估,引入點云重心,參考點云和目標(biāo)點云計算公式分別為
(3)
(4)
然后在式(3)、(4)的基礎(chǔ)上構(gòu)建三維點的協(xié)方差矩陣ζ[7],即
(5)
設(shè)定閾值τ,當(dāng)fk(R,T)-fk+1(R,T)<τ時,算法迭代停止,其中k為迭代次數(shù)。
配準(zhǔn)精度評價的一般方法為計算所有點云的距離的均方根誤差σ,計算公式為
(6)
2 分層粒子群優(yōu)化
2.1 PSO算法
采用PSO算法對三維點云的特征點進(jìn)行提取,將源點云坐標(biāo)作為粒子群的粒子,將多個點云坐標(biāo)作為粒子群算法的輸入集合,求解所有點云中曲率值較大的點作為點云特征點[10]。設(shè)第i個粒子xi=(xi1,xi2,…,xiN)的飛行速度為vi=(vi1,vi2,…,viN),以點的曲率值作為適應(yīng)度函數(shù),求解第i個粒子適應(yīng)度極大值pi=(pi1,pi2,…,piN),然后計算所有粒子的適應(yīng)度極大值pg=(pg1,pg2,…,pgN)。粒子速度更新公式[11]為
(7)
(8)
式中:d為第i個粒子的屬性序號;c1、c2為學(xué)習(xí)因子;ω為上一個時間段的速度權(quán)重;r1,r2∈rand(0,1),為速度因子;r∈rand(0,1),為全局速度因子。
2.2 分層PSO算法
為了提高粒子群搜索速率和尋優(yōu)性能,引入分層PSO算法。分層PSO算法的核心思想是將整個粒子群分成若干子群,根據(jù)子群的最優(yōu)個體和全局最優(yōu)進(jìn)行對比[12],從而能夠在所有粒子中快速找到最優(yōu)個體的位置。
首先將粒子按空間分塊,對每一塊空間中的粒子分別求解最優(yōu)值,同時根據(jù)全局最優(yōu)值不斷調(diào)整位置。分層粒子群的空間分割原理如圖1所示。

圖1 分層粒子群的空間分割原理
按照粒子的初始位置,將粒子群中的160個粒子分為10組,每組均包含16個粒子。在10個子群中分別執(zhí)行PSO算法進(jìn)行速度和位置更新,每次更新后都與全局最優(yōu)解對比,以調(diào)整下一次粒子更新方向,這樣更容易獲得全局最優(yōu)解,且提高了獲取效率。
先將M個粒子群按等額分成L份,建立L個子群,分別在L個子群中采用式(7)、(8)進(jìn)行迭代,然后將第i(1≤i≤L)個子群的適應(yīng)度極大值pig與pg對比[13],從而來指導(dǎo)子群粒子的運動方向,分層粒子群結(jié)構(gòu)如圖2所示。
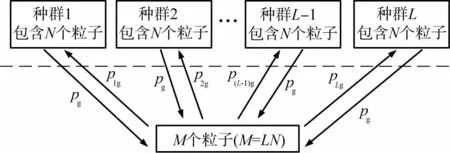
pg—全部粒子的適應(yīng)度極大值;pig—第i個子群的適應(yīng)度極大值,i=1,2,…,L。圖2 分層粒子群結(jié)構(gòu)
子群粒子在進(jìn)行速度更新時,將子群個體、pig與pg三者結(jié)合,共同修正粒子位置,分層粒子群速度更新將在式(7)的基礎(chǔ)上進(jìn)行改進(jìn),具體公式[14]為
(9)
式中:c3為全局學(xué)習(xí)因子;c1、c2和c3值默認(rèn)設(shè)置為2;r3∈rand(0,1),為速度因子。
2.3 分層PSO的三維點云特征提取
將PSO算法用于特征點的提取,選取曲率值大的點作為特征點,采用粒子群快速搜索點云中曲率值大的點,根據(jù)數(shù)值排序,選擇排序靠前的點為特征點。曲率值的閾值決定了入選特征點的數(shù)量,然后采用ICP算法來執(zhí)行特征點配準(zhǔn)。具體實現(xiàn)流程如圖3所示。

ICP—迭代最近點。圖3 分層粒子群優(yōu)化的三維點云配準(zhǔn)流程
3 實例仿真
為了驗證分層PSO算法的三維點云數(shù)據(jù)配準(zhǔn)的性能,首先,選擇長方形的桌面帶紋理的木桌進(jìn)行可視化點云配準(zhǔn)仿真,并計算配準(zhǔn)的均方根誤差σ和配準(zhǔn)時間;其次采用斯坦福點云數(shù)據(jù)庫[15]分別對ICP和分層粒子群優(yōu)化ICP進(jìn)行點云配準(zhǔn)性能仿真。初始值L=5,ω=1.0。仿真平臺為MATLAB 2018。
3.1 分層PSO算法的三維點云配準(zhǔn)性能
3.1.1 三維點云配準(zhǔn)可視化
圖4所示為長方形木桌的源點云和目標(biāo)點云空間分布,其中紅色點為源點云,源點云是經(jīng)過分層粒子群優(yōu)化后的特征點云分布;藍(lán)色為目標(biāo)點云,可以更好地實現(xiàn)源點云配準(zhǔn)的可視化對照。從圖中可以看出,經(jīng)過分層PSO后的點云特征提取性能更好,可以反映該木桌的空間結(jié)構(gòu),并且在所有特征點云中,僅出現(xiàn)1個明顯噪聲特征點。

圖4 長方形木桌的源點云和目標(biāo)點云空間分布
圖5所示為長方形木桌源點云的配準(zhǔn)結(jié)果。對比圖4的藍(lán)色目標(biāo)點云,本文中提出的配準(zhǔn)算法較精確,具體配準(zhǔn)性能標(biāo)準(zhǔn)如表1所示。從圖5還可以看出,ICP算法對噪聲點也進(jìn)行了配準(zhǔn),表明ICP算法并不能有效去除噪聲,因此要使用ICP算法得到點云的精確配準(zhǔn),必須在ICP迭代之前進(jìn)行有效的噪聲消除。

圖5 長方形木桌源點云的配準(zhǔn)結(jié)果

表1 長方形木桌的配準(zhǔn)性能標(biāo)準(zhǔn)
3.1.2 分層PSO算法的點云特征優(yōu)化性能
分層粒子群的子群數(shù)L和粒子速度權(quán)重ω值影響著PSO算法的收斂速度和全局尋優(yōu)性能。為了驗證L和ω對點云配準(zhǔn)的優(yōu)化性能,差異化選取L和ω,驗證本文中提出的算法在點云配準(zhǔn)中的性能,仿真結(jié)果如表2、3所示。

表2 不同速度權(quán)重時的點云配準(zhǔn)性能
從表2可以看出:ω增大,點云配準(zhǔn)的均方根誤差呈現(xiàn)先減小后增大的趨勢,而配準(zhǔn)時間差異并不大;在ω=1.2處,粒子群搜索得到的源點云的特征點經(jīng)過ICP配準(zhǔn)能夠獲得最優(yōu)的配準(zhǔn)精度。
從表3可以看出:隨著子群數(shù)的增加,配準(zhǔn)均方根誤差減小,可見子群數(shù)量越多,特征點提取更有效,點云配準(zhǔn)的精度更高;當(dāng)子群數(shù)為7時,均方根誤差趨于穩(wěn)定,數(shù)值為4.893 3×10-6,但是隨著L的增大,配準(zhǔn)時間也在逐漸增加,原因是子群數(shù)過多引起分層PSO特征點的提取耗時更長。在時間差別不大的情況下,選擇子群數(shù)為7更適合于該方法的點云配準(zhǔn)。
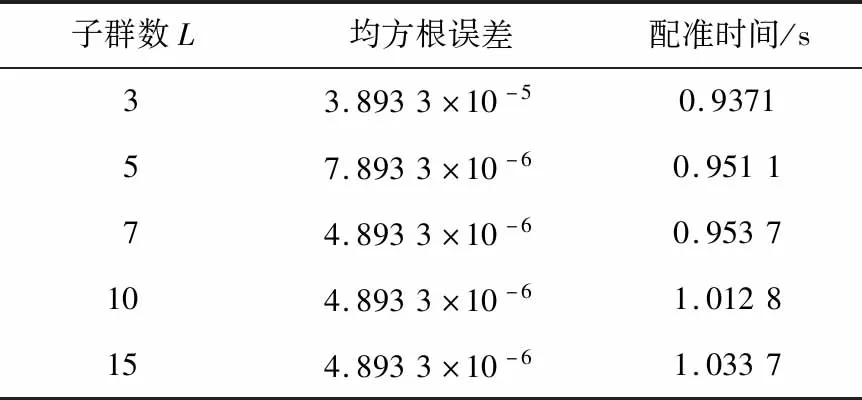
表3 不同子群數(shù)時的點云配準(zhǔn)性能
3.2 不同算法的點云配準(zhǔn)性能
為了進(jìn)一步驗證分層PSO的ICP算法在三維點云配準(zhǔn)中的性能,采用常用的斯坦福點云數(shù)據(jù)樣本[15],對標(biāo)準(zhǔn)ICP算法和經(jīng)過分層PSO優(yōu)化后的ICP算法分別進(jìn)行仿真,仿真結(jié)果見表4。
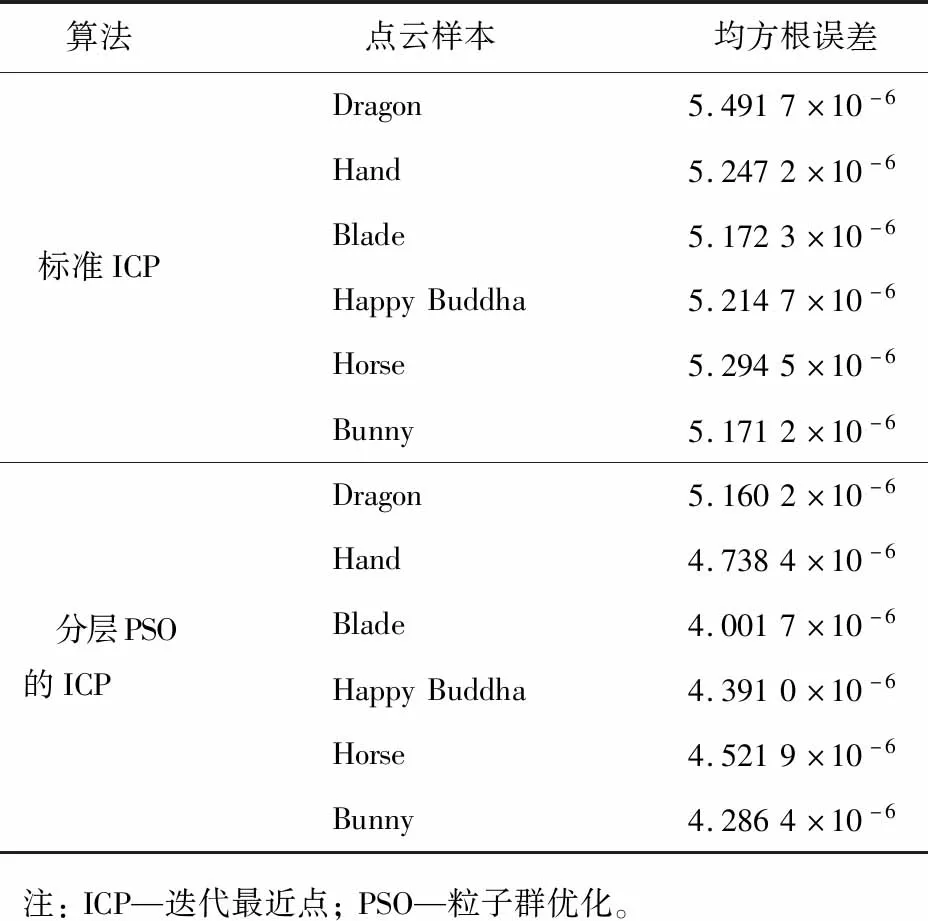
表4 不同樣本的配準(zhǔn)誤差
從表中數(shù)據(jù)可以看出,相比于傳統(tǒng)ICP算法,經(jīng)過分層PSO的ICP算法在斯坦福點云數(shù)據(jù)庫常用的6種不同樣本的配準(zhǔn)精度略高,但兩者差異并不大。該算法在“Blade”樣本的配準(zhǔn)性能最優(yōu),均方根誤差僅為4.001 7×10-6,“Dragon”樣本配準(zhǔn)性能最差,均方根誤差為5.160 2×10-6。
6類不同樣本在標(biāo)準(zhǔn)ICP和本文中提出的算法的配準(zhǔn)時間見表5。在標(biāo)準(zhǔn)ICP中,配準(zhǔn)時間主要消耗在ICP迭代過程中,而在分層PSO的ICP算法中,配準(zhǔn)時間主要消耗在分層粒子群的點云特征點提取和點云配準(zhǔn)2個方面。雖然后者增加了分層粒子群的特征提取時間,但是特征點提取后,減少了ICP迭代的點云數(shù),節(jié)省了配準(zhǔn)時間。通過與3.1節(jié)中長方形木桌配準(zhǔn)效率進(jìn)行對比,當(dāng)需配準(zhǔn)的點數(shù)量增加時,配準(zhǔn)時間增加,木桌的配準(zhǔn)時間為0.951 6 s,而斯坦福點云數(shù)據(jù)庫常用的6種不同樣本配準(zhǔn)時間均為5~7 s。

表5 不同樣本的配準(zhǔn)時間
綜上,分層PSO的ICP算法在三維點云數(shù)據(jù)配準(zhǔn)中的效率提升明顯,但配準(zhǔn)準(zhǔn)確率優(yōu)勢不大,主要應(yīng)用環(huán)境是大規(guī)模點云樣本的快速配準(zhǔn),特別適用于大型物體的點云數(shù)據(jù)匹配。
4 結(jié)語
本文中采用分層PSO的ICP算法進(jìn)行三維點云數(shù)據(jù)配準(zhǔn),在合理設(shè)置粒子速度權(quán)重和粒子子群數(shù)量的前提下,能有效地提高點云配準(zhǔn)效率,并提高配準(zhǔn)的精度。通過對不同量級樣本的仿真可知,分層PSO的ICP算法配準(zhǔn)性能更優(yōu)。后續(xù)研究將對分層粒子群進(jìn)行差異化調(diào)參,進(jìn)一步提高分層PSO的ICP算法在三維點云配準(zhǔn)中的性能。
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2022年3期)2022-04-26 14:04:16
數(shù)學(xué)年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學(xué)學(xué)報(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數(shù)學(xué)(2019年8期)2019-11-25 01:38:14
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學(xué)學(xué)報(2016年1期)2016-06-22 13:10:38
