某核電機組汽輪機超速保護控制反復動作原因分析與處理
2021-07-08 10:56:42鄭軍偉趙東陽劉東亮
核安全 2021年3期
鄭軍偉,趙東陽,劉東亮
(中廣核工程有限公司,深圳 518124)
某壓水堆核電機組(TU1)額定功率為1755 MW,常規島使用HN1755-7.55/291/275.8-H型汽輪機,該汽輪機為飽和蒸汽、單軸、中間再熱、沖動凝汽式汽輪機,汽輪機額定轉速(n0)為1500 r·min-1。汽輪機超速保護控制(OPC)由超加速度保護(OAP)和預超速保護組成,OAP的觸發條件為汽輪機轉速不低于額定轉速的98%(98%n0)且轉子加速度不低于4356 r·min-2,預超速保護閾值為額定轉速的107%(107%n0)。
2019年9月17日,TU1處于額定負荷(額定負荷的100%,100%FP)平臺穩定運行。20時08分,廣東省珠海至中山的500 kV香國乙線發生單相接地故障,電網排除故障后自動1次重合閘成功。電網故障后TU1的負荷從1730 MW瞬時降低了307 MW,機組負荷繼續下降到842 MW后快速回升,負荷回升過程中因蒸汽發生器出口蒸汽壓強下降速率超過停堆閾值,反應堆保護系統自動觸發停堆保護信號,停堆信號連鎖觸發汽輪機跳閘信號,最終造成汽輪發電機組與電網解列,電力系統頻率從50.003 Hz下降到49.913 Hz。從電網故障到汽輪機跳閘前,在約1 s時長內TU1的汽輪機控制系統共采集到3次OPC動作記錄,OPC報警信號顯示這3次OPC動作均由OAP觸發所致。
2004年2月,昆明發電廠受220 kV普吉變電站變壓器故障影響,1、2號機組、普吉變110 kV系統及所供近郊負荷與系統解列成為孤立系統,機組發生OPC反復動作[1]。2005年2月,嶺澳核電廠1號機組受外部500 kV電網A相接地故障影響發生OPC反復動作并導致汽輪機打閘。2006年7月,貴陽南部電網故障后成為孤網,清鎮電廠7、8號機組發生OPC反復動作,最終8號機組跳閘[2,3]。2009年2月,大亞灣核電廠1號機組受外部400 kV電網三相接地故障影響發生OPC反復動作并導致汽輪機打閘[4]。上述發電機組OPC反復動作事件表明機組涉網保護與電網安全自動裝置之間的協調配合是保證機組、電力系統安全穩定運行的關鍵因素之一,源網不協調可能會誘發電力系統或機組運行事故,嚴重時可能導致事故規模擴大化。
《大型發電機組涉網保護技術規范》規定應考慮OPC動作特性與電網特性的配合,防止OPC反復動作對電網的擾動[5]。核電機組OPC設計方案由汽輪機設計供貨方提供,不同技術路線核電機組的OPC控制策略和控制參數存在差異[6];核電機組OPC設計普遍側重考慮機組安全,不同廠址、相同技術路線核電機組的OPC設計方案基本相同,但對源網協調分析不足,機組調試啟動階段受試驗條件限制一般難以充分驗證機組OPC與電網的互相影響。機組遠端電網發生單相接地并自動1次重合閘成功屬于常見的短時電網故障,受這種較小規模電網故障擾動影響造成停機、停堆與電網安全、核安全管理期望不符。因此有必要對TU1受電網短時故障影響發生OPC反復動作的原因進行分析,研究并給出避免問題重發的處理方案。
1 汽輪機加速度影響因素分析
汽輪發電機組運行時,作用在轉子上的力矩包括:蒸汽作用在轉子上的主力矩、發電機的電磁阻力矩、摩擦力矩,由于摩擦力矩遠小于主力矩和電磁阻力矩,因此轉子上的力矩平衡方程為[7-9]:

式中:J——轉子的轉動慣量,kg·m2;
ω——轉子的角速度,rad·s-1;
Mt——蒸汽作用在轉子上的主力矩,N·m;
Me——發電機的電磁阻力矩,N·m。
已知轉子角速度的計算式為:

式中:n——汽輪機轉速,r·min-1。
主力矩和電磁阻力矩計算式為:

式中:Pt——汽輪機內功率,MW;
Pe——機組電功率,MW;
ω——轉子的角速度,rad·s-1。
機組從穩定運行狀態發生甩負荷后的初始階段,由式(1)、式(2)和式(3)推導可得汽輪機轉速變化率的計算式:

式中:Ji——機組在一定負荷下穩定運行時的轉子轉動慣量,kg·m2;
ni——機組在一定負荷下穩定運行時汽輪機轉速,r·min-1。
TU1汽輪機控制系統的數據采集周期為0.02 s,系統設計的汽輪機加速度計算式為:

式中:a——汽輪機加速度,r·min-2;
nt——當前采集周期測得的汽輪機轉速,r·min-1;
nt-1——上一個采集周期測得的汽輪機轉速,r·min-1;
Δt——采樣周期間隔,0.02 s。
由式(4)可知汽輪機轉速變化率與機組甩掉的負荷值成線性正比關系。因此,機組在某一負荷穩定運行工況下發生瞬間甩負荷后,對汽輪機加速度起主要影響作用的是甩掉的負荷值;在甩負荷瞬態的初始階段(從汽輪機轉速開始變化到汽機進汽調節閥門的開度發生明顯變化前),汽輪機加速度的初始值與機組甩掉的負荷值成正比。
2 OPC反復動作原因分析
2.1 OPC邏輯分析
TU1的OPC觸發后,汽輪機控制系統會產生-150%額定蒸汽需求量,觸發汽輪機高壓和中壓進汽調節閥門(以下簡稱汽機調閥)快速關閉指令,通過快速關閉汽機調閥實現平衡轉子力矩、快速穩定汽輪機轉速的目標。OPC邏輯優先于正常的轉速控制邏輯,OPC觸發汽機調閥快速關閉指令可以避免汽輪機轉速上升到跳閘閾值造成汽輪機停機,使得機組能夠帶廠用電或部分負荷繼續運行。TU1的OPC邏輯圖如圖1所示。

圖1 OPC邏輯圖Fig.1 The logic diagram of OPC
2.2 OPC觸發原因分析
TU1在額定負荷平臺甩空載開始前,機組實際負荷為1716 MW(約97.78%FP),甩空載過程中最高轉速為1617.50 r·min-1(約107.83%n0),甩空載開始后的前0.5 s內的試驗曲線如圖2所示。本文根據試驗開始后1.0 s內的汽輪機轉速值繪制甩空載試驗初期的轉速變化曲線,如圖3所示。
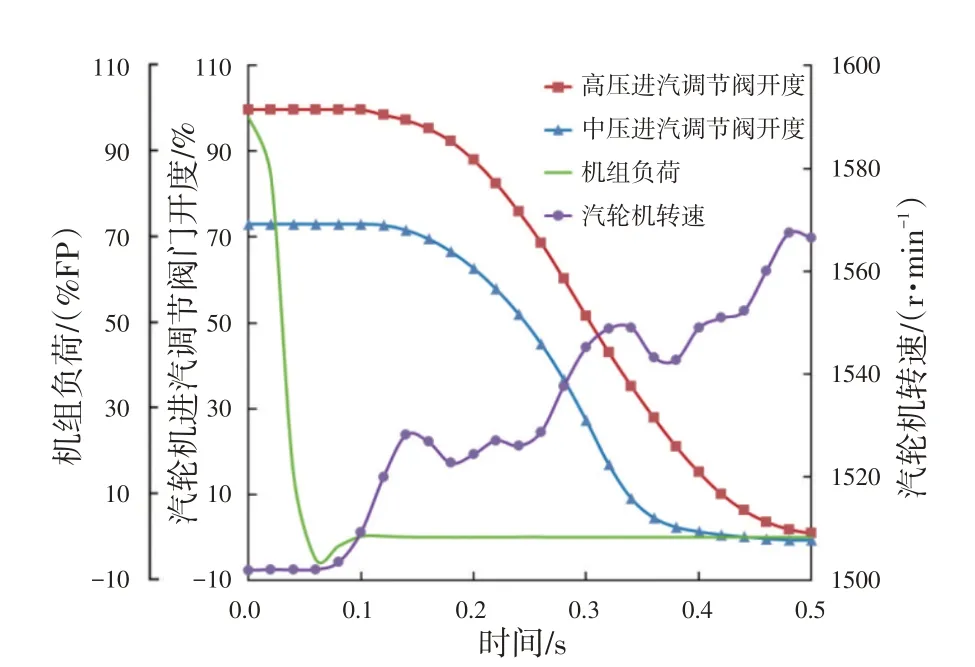
圖2 額定負荷平臺甩空載試驗曲線Fig.2 Curve of load rejection to no-load test on rated power platform

圖3 額定負荷平臺甩空載試驗汽輪機轉速曲線Fig.3 Turbine speed curve of load rejection to no-load test on rated power platform
我們由圖3可知甩空載試驗開始后不同時間段的汽輪機加速度存在差異,使用式(5)計算得出機組從97.78%FP甩空載試驗開始后1.0 s內轉子加速度大于OAP超加速度保護閾值且持續時間不小于0.02 s的數據見表1。
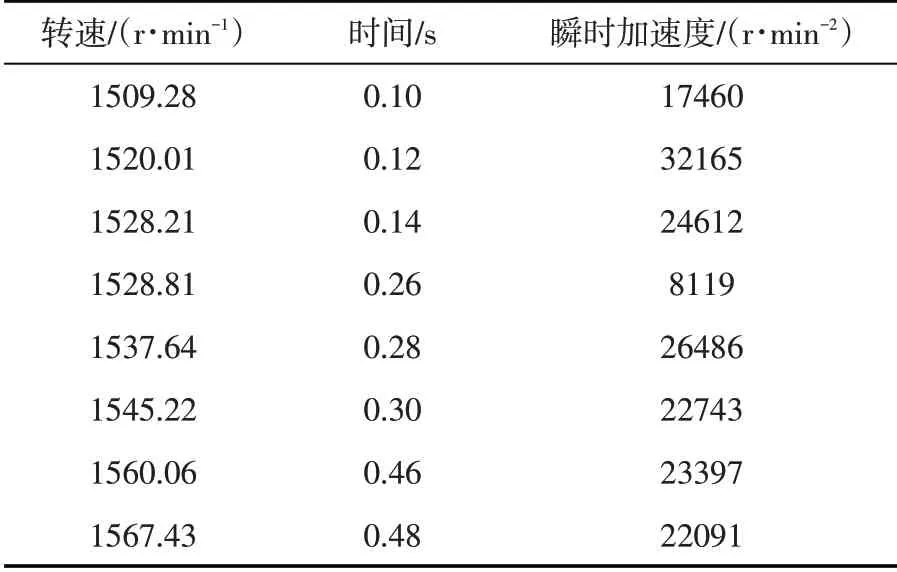
表1 額定負荷平臺甩空載試驗數據Table 1 Data of load rejection to no-load test on rated power platform
取表1中額定負荷平臺甩空載試驗初始階段汽輪機平均加速度最大值(第0.10~0.14 s的加速度平均值,計算結果為28388.5 r·min-2)為加速度基準值(a0),假設TU1從額定負荷平臺穩定運行工況下發生瞬間甩負荷,可用下式計算甩負荷初始階段的汽輪機加速度:

式中:ai——機組從額定負荷平臺瞬間甩負荷初始階段的汽輪機加速度,r·min-2;
a0——28388.5 r·min-2;
ΔPi——機組從額定負荷平臺瞬間甩掉的負荷值,%;
ΔP0——97.78%。
TU1在此次事件過程中汽輪機轉速最高值為1501.86 r·min-1(100.12%n0),轉 速 最 低 值 為1485.93 r·min-1(99.06%n0),二者均高于OAP轉速判斷閾值。使用式(6)計算TU1從1730 MW(約98.58%FP)瞬時甩掉307 MW(17.49%FP)負荷所產生的汽輪機加速度為5078.8 r·min-2,該值大于TU1的OAP超加速度保護閾值(4356 r·min-2),所以TU1在此次事件過程中瞬間甩掉307 MW負荷足以造成OAP觸發,進而觸發OPC動作。事件過程中第1次OPC動作是由汽輪機轉速高于OAP轉速判斷閾值且機組瞬間甩掉307 MW負荷所產生的汽輪機加速度超過OAP超加速度保護閾值所致。
2.3 OPC反復動作原因分析
根據TU1的OPC設計方案,當汽輪機轉子加速度恢復到OAP的加速度保護閾值以下時,OAP延時0.04 s自動復位,在汽輪機負荷控制回路處于自動控制模式前提下,因機組目標負荷仍為OPC動作前的數值,機組蒸汽需求量會自動恢復到OPC動作前的值,汽機調閥響應機組蒸汽需求量后自動快速開啟,直至汽機調閥開度恢復到與機組蒸汽需求量相匹配的值。此次電網故障消除后,TU1的目標負荷依然是故障發生前的1730 MW,汽機調閥響應機組蒸汽需求量自動快速開啟。汽機調閥快速開啟前,汽輪機轉子的主力矩和電磁阻力矩尚未達到平衡,汽輪機轉速尚未調整到穩定值,汽機調閥快速開啟后主力矩瞬時增大,轉子加速度隨之增加,導致0.18 s內(圖4中的0.828~1.008 s)連續兩次觸發OAP,從而造成機組發生OPC反復動作。因此,OPC反復動作的直接原因是OAP反復觸發。電網擾動期間TU1的OAP觸發記錄如圖4(圖4中的時間用于指示OAP觸發后的持續時間及OAP觸發的間隔時間)所示。

圖4 OAP觸發記錄Fig.4 Trigger record of the OAP
3 處理方案制訂與實施
3.1 OPC設計合理性分析
當前壓水堆核電機組OPC動作定值普遍由汽輪機設計單位給出,而汽輪機設計方在OPC定值選擇過程中通常側重考慮對汽輪機發電機組的保護,缺少與機組的核島控制保護系統和外部電網的協調[10-12]。OAP的非預期觸發對處于穩態工況運行的核電機組而言是一種干擾,從有利于機組運行安全和經濟性角度考慮,我們應提高OAP的抗干擾性能,避免OPC的不必要觸發。
汽輪機轉子飛升時間常數的計算式為:

式中:Ta——轉子飛升時間常數,s;
n0——額定轉速,r·min-1;
a——轉子加速度,r·min-2。
TU1汽輪機的轉子飛升時間常數的設計分析值為10.33 s,據此使用式(7)計算機組從額定負荷甩空載的轉子加速度為8712.49 r·min-2。OAP的加速度保護閾值為4356 r·min-2,使用式(6)計算可知該保護閾值對應的工況是機組從額定負荷甩掉50%FP所對應的加速度,即設計期望的OAP動作工況應為機組從額定負荷瞬間甩負荷不少于50%FP所對應的瞬態。由此可知TU1在此次事件過程中甩掉17.49%FP造成OAP觸發,進而導致OPC動作是超出設計預期的。OAP的加速度保護閾值是由汽輪機設計單位根據具體機型的參數計算后給出的,出于安全考慮,在工程應用環節一般不予修改。
此次事件過程中汽輪機轉速最高值僅為額定轉速的100.12%,距離預超速保護閾值(107%n0)、轉速跳閘閾值(110%n0)還有較大的安全裕量。因此,TU1的OAP轉速判斷閾值設計不合理,OAP轉速判斷閾值偏小。
3.2 OAP轉速判斷閾值調整可行性分析
按照TU1的汽輪機控制邏輯,甩廠用電信號觸發后汽輪機的蒸汽需求量立即被強制為10%,甩空載信號觸發后汽輪機的蒸汽需求量立即被強制為3%,額定負荷對應的高壓調節閥門開度為80.9%,由蒸汽需求量偏差(負荷偏差)產生的高壓調節閥門關閉指令將導致高壓調節閥門的快速關閉動作。根據TU1在額定負荷平臺試驗數據,OAP在甩廠用電開始后第0.10 s觸發,OAP在甩空載開始后第0.12 s觸發。甩廠用電、甩空載信號先于OPC觸發汽機調閥快速關閉指令,從而抑制轉速過度飛升。
TU1在額定負荷平臺甩廠用電、甩空載試驗開始后第0.12 s汽機調閥開度發生實質關閉,第0.14 s出現第1個轉速峰;結合試驗期間OAP觸發時間可知,甩廠用電、甩空載發生后汽輪機第1個轉速峰與OAP觸發時間無直接關系。OPC觸發后產生汽機調閥快速關閉指令,有助于進一步抑制汽輪機轉速飛升;因此,OAP在瞬態過程中的第1個轉速峰到達之前觸發便可以實現在額定負荷甩空載等瞬態下預先控制轉速飛升速率和幅值的設計目標。由此可知,我們可以提高TU1的OAP轉速判斷閾值。
3.3 處理方案
假設在某一時間段內汽輪機加速度恒定并已知的前提下,可使用下式計算在加速度作用一段時間后的汽輪機轉速:

式中:na——加速度作用一段時間后的汽輪機轉速,r·min-1;
n0——額定轉速,r·min-1;
a——轉子加速度,r·min-2;
ta——汽輪機受加速度作用的持續時間,s。
假設TU1從額定負荷瞬間甩掉50%FP,瞬態發生前汽輪機轉速為額定轉速,基于TU1從97.78%FP的甩空載試驗數據,本文使用式(6)計算得出機組從額定負荷甩掉50%FP所產生的初始加速度為14516.52 r·min-2;由汽輪機高壓調節閥門特性曲線可知:在此瞬態過程中汽輪機控制系統將根據負荷偏差產生一個-56.6%的高壓調節閥門關閉指令,高壓調節閥門開度將快速關小。本文取瞬態發生后的第0.14 s計算瞬態過程中的第1個轉速峰值,使用式(8)計算得出第1個轉速峰對應的汽輪機轉速為1533.87 r·min-1,即額定轉速的102.26%。TU1的汽輪機高壓調節閥門特性曲線見圖5。

圖5 高壓調節閥門特性曲線Fig.5 High pressure control valve characteristic curve
為了滿足OAP能夠應對機組從額定負荷瞬間甩掉不少于50%FP所產生的瞬態,TU1的OAP轉速判斷閾值應小于額定轉速的102.26%。《核電廠汽輪機儀表和控制技術條件》規定汽輪機調節系統應達到DL/T996的性能和指標要求[13],DL/T996—2019《火力發電廠汽輪機控制系統技術條件》規定機組并網后,汽輪機轉速超過限值時(按當地電網要求)OPC能動作[14]。參考上述行業標準和機組所在電網要求,保守原則下將TU1的OAP轉速判斷閾值最終修改為額定轉速的102%。
4 結語
部分在建的華龍一號(HPR1000)核電機組、國和一號(CAP1400)核電機組使用的汽輪機與TU1的汽輪機屬于相同技術路線,OPC的保護控制邏輯基本相同(參數略有差異),在機組設計、調試啟動階段可參考本文給出的分析方法和處理方案對OAP的控制保護參數進行優化,防止因OAP控制保護參數設置不合理造成OPC非預期反復動作,降低機組受外部電網短時故障干擾發生非計劃停機、停堆事件的風險。
猜你喜歡
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
能源工程(2020年5期)2021-01-04 01:29:00
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
廣西電力(2016年4期)2016-07-10 10:23:38
工業設計(2016年4期)2016-05-04 04:00:23
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
機械制造與自動化(2014年1期)2014-03-01 04:21:47
