大角位移有限轉角力矩電機輔助齒的設計與優化
2021-07-12 00:47:44劉有恩葛紅巖崔浪浪
現代機械 2021年3期
劉有恩,劉 勇,葛紅巖,崔浪浪
(1.貴州航天林泉電機有限公司,貴州 貴陽 550000;2.國家精密電機工程技術中心,貴州 貴陽 550000)
0 引言
有限轉角電機以其結構簡單、轉動慣量、機電時間常數小[1],能承受較大的角加速度,并且在一定角度范圍內,可以做快速往復運動和準確定位等特點[1-4],已廣泛應用于隔離開關[1-2]、衛星波導開關、戰斗機飛行員電觸發解鎖的拋傘機構[3]等輸配電及航空航天領域。隨著研究的持續深入,有限轉角力矩電機研究取得了巨大的成果。文獻[4]研究了開槽型有限轉角電機的多余度設計。在設計方法上,文獻[1-4]均提出了借助有限元仿真軟件Ansoft的Maxwell2D模塊進行建模分析,文獻[2]提出通過輸入PWM進行采樣計數的方法建立PWM與電機電樞兩端電壓的關系的新思路,再輔助ISE開發FPGA對有限轉角直流無刷電機進行模型實現,并對模型進行了仿真與分析。
雖然有限轉角電機在位移精度、反應時間和轉矩密度等方面取得了長足發展,但在衛星波導開關等一些特殊運用場合,需要電機在較大角位移條件下確保較大的轉矩輸出,在這一方面仍然較少研究。本文提出了一種通過設置輔助齒的定子開槽電機結構并進行優化,實現了在較大角位移下保持較高的轉矩輸出。
1 永磁有限轉角電機的原理
常見開槽有限轉角電機如圖1(a)所示,對于傳統結構,當輸出角位移大于90°電角度時,角位移越大,啟動轉矩越小,并且由于漏磁等原因影響,轉矩急劇降低。為改善這一缺點,本文設計的有限轉角電機如圖1(b)所示。

圖1 常見開槽有限轉角結構和輔助齒結構圖
本文所述結構與常規有限轉角開槽結構區別在于,通過設置輔助齒,將鐵芯齒的磁場拉偏,使之處于齒與輔助齒之間的某一位置,減小電氣角度,使之盡可能地接近90°,從而提高轉子初始位置的輸出力矩。
如圖2所示,轉子永磁體產生的磁場用Φ0表示,載流導體通電后在鐵芯上產生的電樞磁場用Φ1表示,功率角為θ。在起始位置,電樞反應輸出的電磁轉矩用公式(1)表示,Kt轉矩系數。

圖2 兩種結構磁通分布圖
Te=KtΦ1Φ0sinθ
(1)
由于電機的角位移大于95°,電機是兩極電機,電機初始位置的啟動轉矩小,帶載能力差。設置輔助齒后,載流導體產生的磁通將有一部分通過輔助齒與轉子磁場交鏈,電樞磁場被分解成兩個矢量Φ11和Φ12,功率角θ向90°靠近,有效提升啟動轉矩。輔助齒的設計,為定子磁場開辟了并聯磁路,有效降低了磁阻,在相同的勵磁電流作用下,轉矩系數Kt和磁通Φ1都明顯增強,提升啟動轉矩。
2 磁路結構的有限元仿真分析
為了說明本結構中增加輔助齒能有效改善啟動轉矩,本部分將采用有限元分析軟件對傳統無輔助齒結構和設置輔助齒的結構進行仿真分析。仿真時通過設置相同的轉子初始位置和旋轉角度,載流導體通相同極性和大小的電流。由于本文著重研究設置輔助齒與否對電機啟動轉矩的影響,因此忽略永磁體形狀和主齒形狀對電機性能的影響。
建立無輔助齒結構和有輔助齒結構有限元仿真模型,仿真得到啟動過程中磁力線分布圖如圖3,氣隙磁密波形如圖4。
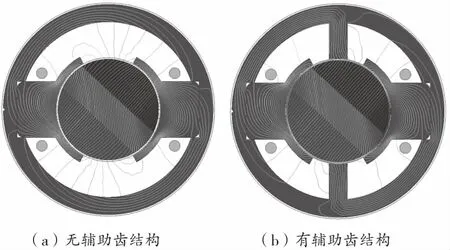
圖3 啟動時刻磁力線分布圖
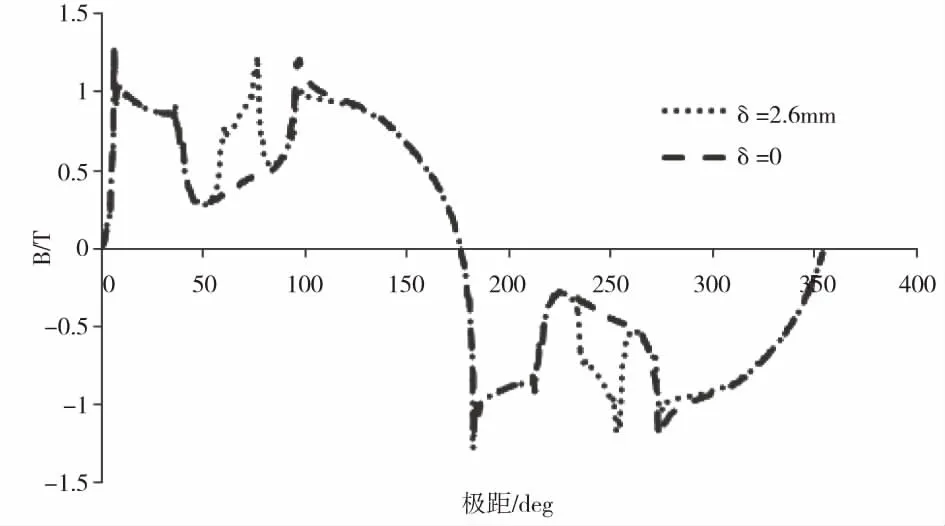
圖4 氣隙磁密波形圖
通過仿真結果可以看出,電機漏磁較大,定、轉子磁場軸線夾角較大,氣隙磁密有效值為0.7273 T。
在無輔助齒結構的基礎上,保證主齒結構尺寸相同,在兩個主齒之間設置輔助齒。電機為對稱結構,為保證輔助齒在兩個旋轉方向上作用效果相同,將輔助齒設置在對稱位置,使之軸線分別于兩個主齒軸線成90°電角度夾角。由于電機為1對極結構,設置在與主齒軸線成90°夾角的位置。
通過仿真結果可以看出,電機漏磁明顯改善,定、轉子磁場軸線夾角較大,氣隙磁密有效值為0.7573 T。
可見設置輔助齒后,減小了漏磁,提高了氣隙磁密。輔助齒上產生磁通與理論設計所起功能相同。
3 輔助齒設計優化
3.1 輔助齒對啟動轉矩的影響分析
設計輔助齒的電機如圖5所示,忽略永磁體厚度對氣隙磁場強度的影響,將電機沿一個主齒展開,分析電機在角位移為0°時定轉子電樞反應受力情況。
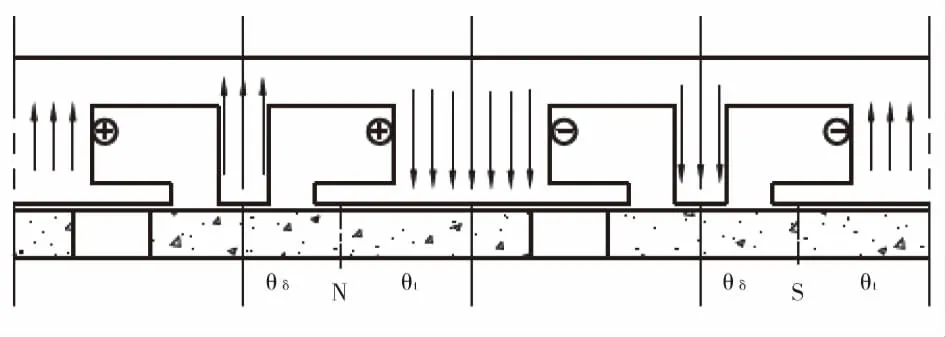
圖5 0°角位移時刻電機展開圖
啟動時刻電樞反應對轉子的作用力可分為兩種,輔助齒對轉子的吸引力和主齒對轉子的排斥力,兩種力分布在電樞圓周對稱位置。由于吸引力和排斥力的作用方向都與轉子的旋轉方向相同,因此輔助齒的作用力顯著增強了電機的啟動轉矩。
在0°角位移時刻,轉子上的永磁體始終受輔助齒上電流產生的磁場拉力,受主齒上電流產生的磁場排斥力。通過公式(2)計算出轉子所受來自輔助齒的磁拉力。通過公式(3)計算出轉子所受來自主齒的磁排斥力。
(2)
(3)
式中:Fδ0輔助齒對轉子磁極的磁拉力;Ft0主齒對轉子磁極的磁排斥力;B為氣隙磁場強度;μ0為空氣磁導率;Sδ輔助齒截面積;St主齒截面積;θδ輔助齒中心線與磁極中心線夾角;θt主齒中心線與磁極中心線夾角。
根據公式(2)可知,在確定主齒結構外形的條件下,在角度為0°時刻,輔助齒對轉子的磁拉力與輔助齒截面積Sδ成正比。因此,當電機軸向長度確定后,輔助齒越寬,啟動轉矩越大。
通過改變輔助齒的寬度,仿真出了輔助齒寬δ為不同值時初始位置的啟動轉矩值Tst,見表1所列。
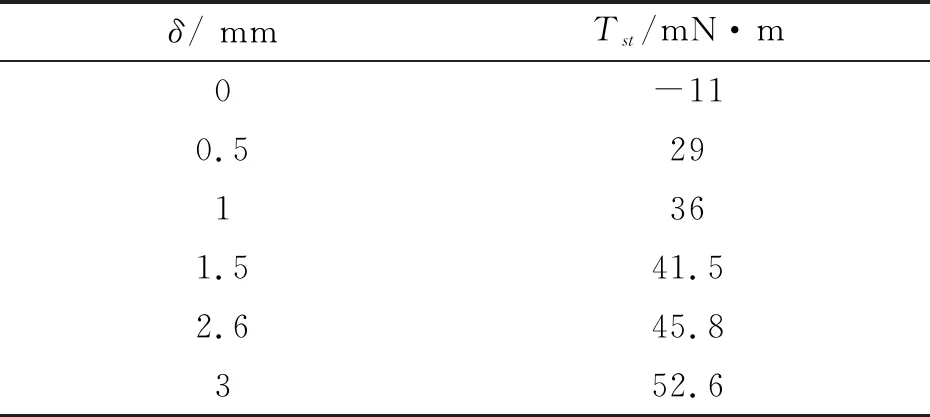
表1 不同輔助齒寬時的啟動轉矩
根據表1的仿真結果可知,未設置輔助齒的結構,在初始位置電機的啟動轉矩為負值,這是由于電機功率角度θ過大,并且此時外加電流引起的電樞反應轉矩無法克服齒槽轉矩,電機不能轉動。當設置輔助齒后,輔助齒上的磁通向量與主齒磁通向量疊加,使氣隙合成磁場位置前移,極大地減小了功率角θ,電樞反應的轉矩較大,電機克服齒槽轉矩影響而旋轉輸出角位移。隨著輔助齒的寬度加寬,氣隙合成磁場前移越來越明顯,啟動轉矩也更大。
3.2 輔助齒寬度對峰值轉矩的影響分析
根據公式(2)和公式(3)可知,若磁通不發生變化時,轉子所受的力是呈正弦規律變化,電機輸出轉矩按正弦規律變化。電機啟動以后,功率角θ越來越小,直至靠近90°角附近時,電機的輸出轉矩達到最大,隨后轉矩逐漸減小。
峰值轉矩的大小和峰值點出現的角位移關系到電機的反應快慢和角位移終點的轉矩大小。峰值點處的角位移越大,證明電機帶載加速段越長,反應速度越快,在角位移終點的轉矩越大,電機抗過載和擾動能力也越強;反之則電機反應越慢,角位移終點的轉矩越小,抗過載能力越弱。電機反應則無法在規定時間內完成角位移輸出,抗過載能力弱則會出現電機角位移輸出不足或倒轉等現象,對武器裝備產生較大危害。
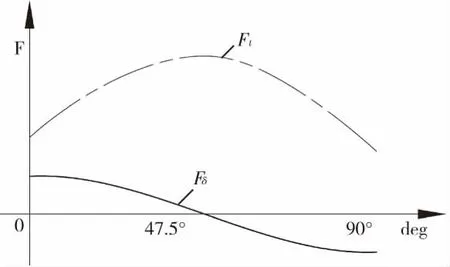
圖6 Fδ和Ft隨角位移變化曲線
隨著轉子的旋轉,轉子磁極軸線逐漸靠近輔助齒軸線,功率角θδ為零或為負。由于輔助齒在兩個主齒之間,電機為一對極,因此輔助齒對轉子的作用力變化超前主齒對轉子的作用力90°電角度,Fδ和Ft隨角位移變化曲線如圖6所示。當角位移超過47.5°后,將電機沿主齒軸線展開,如圖7所示,輔助齒磁場對轉子的作用力與旋轉方向相反,對主齒作用力起抵消作用。
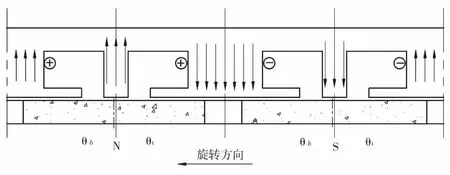
圖7 48°角位移時刻電機展開圖
通過有限元計算出不同δ條件下轉矩隨角位移變化的曲線如圖8所示,根據曲線變化趨勢可見,隨著輔助齒變寬,峰值幅值變小,峰值點角位移逐漸變小。
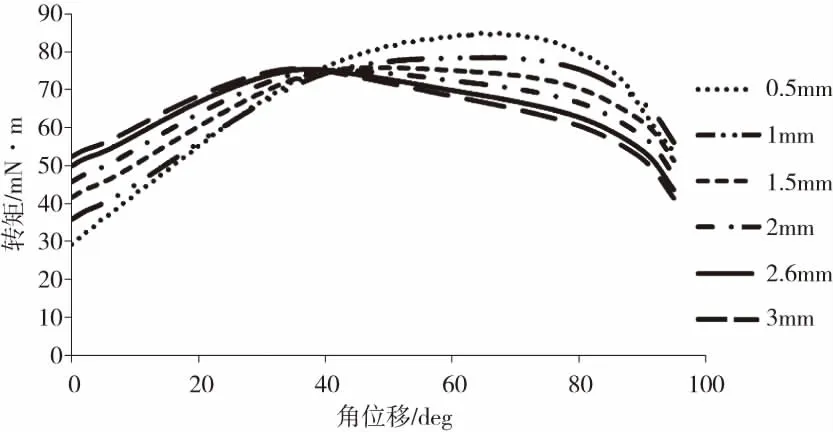
圖8 不同δ轉矩隨角位移變化的曲線
圖9所示為峰值轉矩幅值和峰值點角位移隨δ變化的曲線,隨著δ增大,在峰值點過后,輔助齒的反作用力明顯。
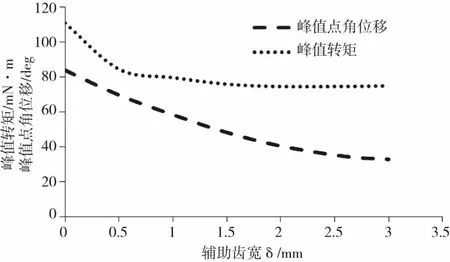
圖9 峰值轉矩和峰值點角位移變化曲線
根據圖8的轉矩曲線變化趨勢和圖9轉矩峰值變化趨勢可知,隨著δ增大,轉矩峰值幅值下降,峰值點處的角位移越來越小。這主要是由于輔助齒雖然縮短了磁路,但是鐵芯軛部磁路未發生變化,隨著氣隙磁密的增加,軛部飽和度也在增加。圖10所示為有輔助齒和無輔助齒電機在角位移中點處的磁密云圖,通過對比發現,設置輔助齒的電機已過飽和,主齒上的作用力無法提升,但輔助齒上的反作用力卻在增加,導致了輔電樞反應輸出的峰值轉矩變小。角位移增大的同時,輔助齒反作用力與主齒作用力同時增大,二者之和趨于動態平衡,因此輸出轉矩趨于平穩。
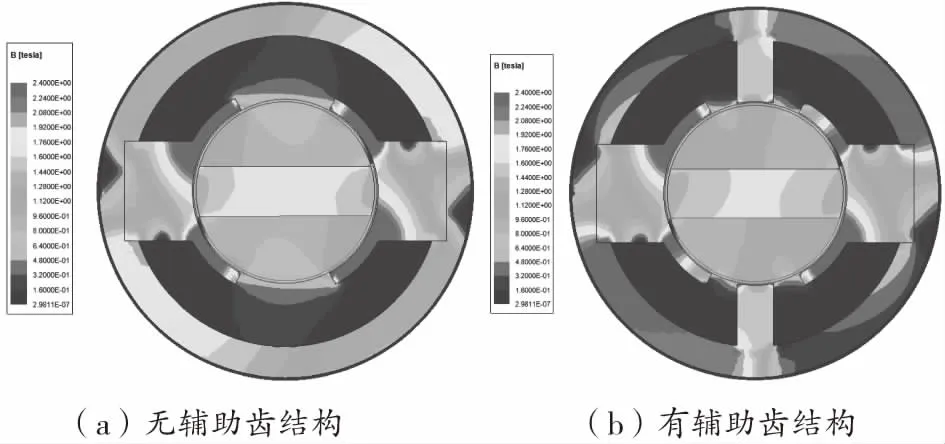
圖10 角位移中點時刻磁密云圖
由于主齒不變,當軛部飽和后,主齒作用力變化確定,但是輔助齒越寬,反作用力越大,則隨著輔助齒寬度δ的增加,相同角位移點的轉矩呈下降趨勢。
3.3 輔助齒對角位移終點轉矩的影響
在角位移的終點,輔助齒對轉子的反作用力達到最大,因此δ值越大,反作用力越明顯,圖11曲線描述了這一變化趨勢,圖12所示為角位移終點時刻的磁力線分布圖。可見在角位移終點處,輔助齒越寬,磁力線分布越密。
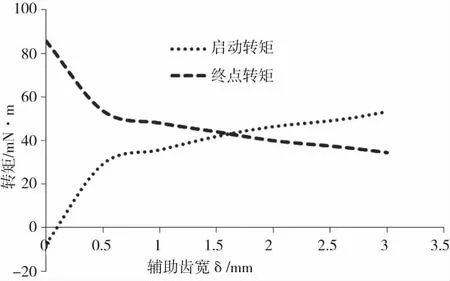
圖11 角位移始點和終點轉矩變化情況
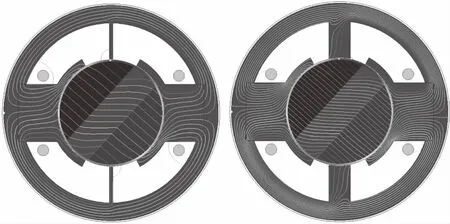
圖12 角位移終點時磁力線分布情況
通過分析可以發現,雖然增加輔助齒的寬度有利于改善啟動轉矩,但由于輔助齒越寬,在輔助齒上產生的磁通分量Φ1幅值越大,從整體的角度來看,功率角θ將大大縮小,根據公式(1)可知,不利于角位移后段轉矩的提升。
因此再設計時可兼顧電機的使用特點和角位移范圍,合理選取輔助齒寬,爭取達到最優。
4 樣機的性能試驗及分析
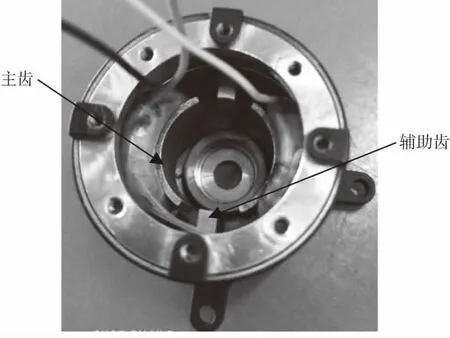
圖13 樣機定子結構
根據理論分析和仿真計算結果,設計并制造出樣機,定子如圖13所示。由于電機用于衛星通信系統中,對可靠性要求較高,因此這對電機的啟動轉矩和終點轉矩均要求較為嚴格,在盡可能提高電機的啟動轉矩,提高帶載能力的前提下,兼顧終點轉矩。綜合優化后,將輔助齒寬δ設計為2.6 mm,此時啟動轉矩和終點轉矩值相近。
首先對電機繞組通入電流,測量出電機角位移為0°時的啟動轉矩和95°角位移的終點轉矩見表2,通過實測值可知,實測值相對仿真值有偏差,但正反轉對稱性較好,且偏差趨勢與理論分析相符。分析是由于電機鐵芯材料為鐵鎳合金,機加工引起導磁性能下降,而電機本身飽和度較高,引起轉矩差異,設計參數與仿真和理論設計相符。
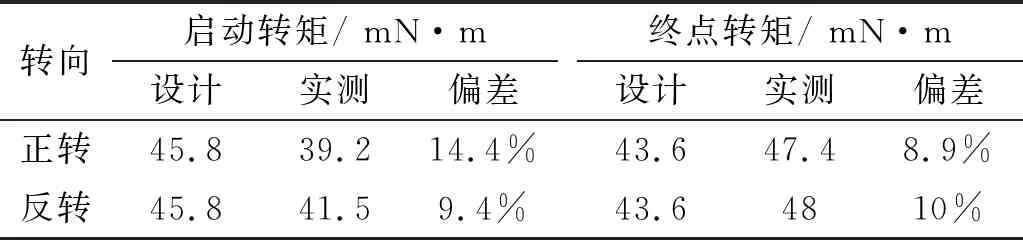
表2 電機的啟動轉矩實測值
5 結論
通過仿真優化和理論研究,設計了一臺角位移達95°的有限轉角力矩電機,該力矩電機轉矩突變小,在有限角位移范圍內,最大轉矩為最小轉矩的2.7倍時,轉矩變化趨于平緩,電機啟動轉矩與終點轉矩接近。
通過對有限轉角電機輔助齒的優化,可得到如下結論:
1)輔助齒將電樞磁場分成多個矢量,縮小電樞合成磁場軸線與轉子磁極軸線之間的功率角θ;
2)輔助齒在角位移為0°時為主齒提供一個輔助的啟動力,可顯著改善角位移大于90°電機的啟動性能,拓寬角位移;
3)輔助齒越寬,啟動時從輔助齒通過的磁力線越多,啟動轉矩越大;
4)輔助齒在角位移中點以后會產生一個削弱主轉矩的反作用力,該反作用力與通過輔助齒的磁力線成正比;
5)輔助齒產生的反作用力會引起轉矩峰值幅值下降和峰值點角位移變小。
