機器視覺在無人機智能避障的應用方法研究
2021-07-12 09:00:02董振鵬龍飛虎周德旭
新型工業化 2021年3期
董振鵬,龍飛虎,周德旭
(尚良仲毅(沈陽)高新科技有限公司,遼寧 沈陽 110000)
0 引言
隨著科學技術和電子信息技術的發展,無人機領域也得到了飛速的發展。現階段無人機被廣泛應用于民用和軍用之中,在高溫、極寒等環境下無人機也可以輔助人們開展工作。隨著無人機應用的領域越來越廣,人們對無人機的性能要求也在不斷提高,特別是在無人機的續航、避障和自主跟蹤等方面。無人機是否能夠智能避障關乎著無人機的安全性能。當前無人機大多采用超聲波避障技術或是激光雷達避障技術,這兩種避障技術受自然環境的影響較大,制約了無人機的發展。隨著機器視覺的出現和發展,將機器視覺應用到無人機智能避障的呼聲不斷出現。本文對機器視覺在無人機智能避障上的應用方法進行分析,以供參考。
1 無人機避障方法
1.1 超聲波避障
當前無人機避障大多采用超聲波避障,只要知道無人機發射的超聲波到障礙物的往返時間就能計算出測量距離,從而進行避障。超聲波避障當前主要應用于無人機和汽車行業中,超聲波避障具有性價比高、較為便攜、抗干擾能力強等優點。但是超聲波避障的測量距離有限,一般只能測量5m左右的距離,并且障礙物表面的材質對于超聲波的測量也會造成干擾[1]。
1.2 激光雷達避障
當前無人機避障采用的另一種形式是激光雷達避障。激光雷達避障是通過發射器發射光脈沖再通過接收器接受光脈沖來進行測距和避障。當前激光雷達避障法常采用時間測量法和三角測量法來進行距離測算。無人機通過激光雷達避障既避免了超聲波避障測量距離有限的缺點,還避免了障礙物表面材質對測距造成干擾的問題,測量精度相對較高。但是由于激光雷達避障是通過發射光脈沖來進行測距的,在使用的過程中容易造成光污染[2]。
1.3 機器視覺避障
機器視覺避障就是通過攝像機對障礙物進行拍攝,并通過智能計算來對拍攝到圖片進行對比識別的方式進行距離測算,從而進行避障。相比于超聲波避障和激光雷達避障,機器視覺避障能夠自主地進行光源信息的接收,從而獲得更大的信息量。但這也對無人機的硬件處理器的處理能力提出了更高的要求。
2 機器視覺避障
2.1 攝像機成像原理
攝像機的成像原理是通過鏡頭將物體拍下來,再通過圖像傳感器將光信號轉變成為數字圖像,然后通過圖像處理器將轉換后的數字圖像進行儲存。攝像機成像的原理如圖1所示。
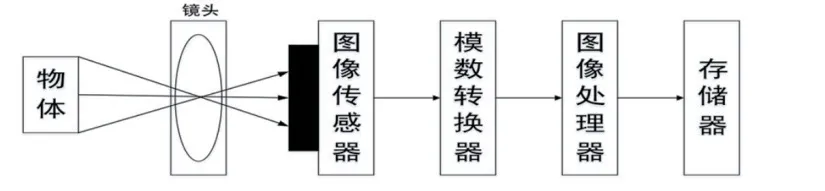
圖1 攝像機成像原理
2.2 圖像處理
對于圖像處理一直有一種共識,就是圖像在獲取、轉換與傳輸的過程中極有可能會被外界環境所污染,導致圖像的質量受到損害。因此在進行機器視覺的研究過程中就需要對攝像機拍攝到的圖像進行預先處理,并且要對閥值進行一定的切割,同時還要對拍攝路徑進行跟蹤。攝像頭拍攝到的圖像不僅包含所需要的元素還存在很多無用的冗雜的信息,如果不對這些無用的信息進行處理,就會干擾最后的避障效果。因此就需要對攝像機拍攝到的信息進行預先處理,剔除不需要的信息。
2.3 障礙物的識別
對障礙物進行識別最重要的就是要及時對前方是否存在障礙物進行檢測和判斷,同時要對選定的目標通過軌跡描述進行跟蹤,最后要對障礙物和無人機之間的距離進行定位與測算。對障礙物進行識別中最基礎的就是對障礙物進行檢測,然后是對障礙物與無人機之間的距離進行測算[3]。
空間目標的跟蹤是指根據具體目標的特征來建立模版,然后再通過和系統中的圖像序列進行對比搜尋,選取和建立的模版之間最相像的圖像序列的過程。通過對空間目標的跟蹤可以確定具體目標在圖像序列中的軌跡。當前對空間目標進行跟蹤時首先要通過搜索算法來對搜索區域進行篩選,將跟蹤目標的具體位置進行大致的區分,以此來減輕進行目標搜索時的工作量。對空間目標的位置進行區分的時候往往采用以下兩種算法進行區域篩選。第一種是通過對空間目標大致出現在圖片序列的幀數進行預測,之后根據預測的范圍尋找最優的那一點,較為常用的算法有Kalman濾波及其擴展版等。第二種算法是通過縮小空間目標的搜索范圍來優化所需要搜索的方向與范圍。這種算法可以優化目標模版與圖像序列之間的迭代過程,從而起到減小搜索范圍的效果。
對空間目標進行跟蹤主要是為了獲取無人機上面安裝的攝像頭與場景中障礙物之間距離,這一步即是機器視覺重要的任務之一也是最終識別障礙物的重要目標之一。通過攝像頭拍攝前方場景來對障礙物與無人機之間的距離進行數據的采集,并通過對獲取的參數進行計算來測算障礙物與無人機之間的速度數據,為無人機通過這種機器視覺進行智能化避障提供數據支撐[4]。
3 雙目視覺測距理論
雙目視覺測距理論是指利用視覺差來進行距離測算。通過安裝在無人機上的兩個互相平行的攝像頭對前方場景進行拍攝,再利用兩個攝像頭拍攝到的畫面的差異之處也就是視覺差,通過一系列的計算測算出障礙物與無人機之間的距離。通過這種方式測算出來的數據精確度較高,具有較強的參考價值。
雙目視覺測距的原理是兩個互相平行的攝像頭由于位置的不同拍攝到的畫面具有一定的差距,本質是三角測距理論。兩個攝像頭即便拍攝同一目標物,在成像后目標物的像素位置也會有一定的不同之處,通過三角測距的算法就可以測算出目標物與無人機之間的實際距離,從而能夠幫助無人機躲避障礙物。
通過雙目視覺測距法來進行測距時要掌握兩個要點。首先是準確識別到障礙物,即無人機上安裝的相互平行的兩個攝像頭要準確掌握障礙物在圖像中呈現出的具體大小和方位。其次是在進行拍攝過程中通過兩個攝像頭拍攝障礙物圖像的不同來尋求兩者之間的立體匹配點,獲取立體匹配點在后期進行測算的時候能夠獲得更加深度的數據信息,更好幫助無人機通過機器視覺的運用進行智能避障。第一個要點是獲得第二個要點的基礎,通過第一個步驟對障礙物進行拍攝的時候圖像中可能存在多個障礙物體,只有通過第二個步驟找尋立體匹配點才能更加精準地對無人機所要躲避的障礙物進行標記,才能更好地測算障礙物與無人機之間的距離,更好地實現無人機的智能避障[5]。
4 無人機避障的關鍵
首先是飛控。無人機的飛控是將無人機與航模區分開來的主要標志之一,通過飛控使無人機能夠實現自主飛行,從而能夠更好幫助人們完成工作。其次是云臺。通過云臺可以降低無人機身上架設的攝像頭受無人機飛行產生的抖動影響,能夠提高攝像頭拍攝畫面的精準度和提升攝像頭的轉動范圍。再次是圖傳。圖傳主要考慮的是無人機和接收端的傳輸距離與傳輸的質量和延時程度。當前占據消費主流的無人機使用傳輸距離在600-800m左右的2.4GHz WiFi的圖傳。當前市場上的高清圖傳價格較為昂貴,雖然高清圖傳能夠實現更遠距離的傳輸并具有更高畫質的圖像,但是當前使用較多的無人機還是以拍攝更加專業的航拍為主。再次是無人機的計算機視覺,無人機通過對計算機視覺的使用能夠實現手勢操作,能夠實現雙目視覺深度測算。但是由于當前大部分無人機硬件設施不能滿足計算機視覺的需要,能夠完成計算機視覺的無人機類型還比較有限。最后是避障。如上文所說無人機通常采用超聲波和雷達激光等方式進行避障。當前對于無人機的避障功能的開發還是沒有得到足夠的重視,其實為了提升無人機的安全性和為了保障他人的生命財產安全,提升無人機的避障效果是非常重要的,如果無人機的避障效果得到顯著的提升,那么無人機能夠得到應用的范圍也會愈發廣泛[6]。
5 結語
隨著經濟的發展和信息技術水平的提升,無人機在我們的生活中應用的領域越來越廣。而隨著無人機應用領域的拓展,對于無人機的性能也提出了更高的要求。對于無人機的避障系統進行研究的呼聲也越來越高。本文對無人機在飛行過程中對于障礙物的識別的方式和雙目視覺測距理論等進行探討,同時對當前無人機避障的關鍵進行了分析。將機器視覺運用到無人機的避障中是一項非常具有挑戰性的課題,通過對無人機避障的研究可以提升無人機避障的水平,從而推動無人機在更廣泛的領域得到應用。