兩段式液壓機械無級傳動機構運動特性研究
2021-07-13 06:20:30楊樹軍李學良
工程設計學報 2021年3期
關鍵詞:機械
張 璐,楊樹軍,李學良,韓 斌,龐 雨
(燕山大學河北省特種運載裝備重點實驗室,河北 秦皇島 066004)
液壓機械無級傳動(hydro-mechanical continuously variable transmission,HMCVT)系統(tǒng)是由液壓路和機械路復合而成的雙功率流傳動系統(tǒng)。該系統(tǒng)通過調節(jié)排量比實現(xiàn)液壓元件的轉速變化,液壓元件與機械傳動元件匯速后實現(xiàn)段內無級調速,多個段銜接起來實現(xiàn)寬范圍的無級傳動。HMCVT 系統(tǒng)因其能夠實現(xiàn)大功率無級調速、傳動效率高等優(yōu)點,適用于拖拉機等大功率車輛[1]。
美國學者Mark等對液壓機械的建模、仿真和特性等進行了深入研究[2-4]。意大利學者Alarico等對液壓機械在大功率拖拉機上的應用進行了大量研究[5-7]。液壓機械也已應用于美國M2 戰(zhàn)車、日本10式主戰(zhàn)坦克和小松推土機等裝備[8-9]。德國ZF Friedrichshafen AG(采埃孚股份公司)和Fendt公司生產的液壓機械無級變速器,已應用于Deuta-Fahr、JCB 和Steyr等著名公司生產的拖拉機[10-11]。
國內學者苑士華等針對軍車用液壓機械提出了相對完整的設計方法[12-13]。徐立友等研制了東方紅1302R 型拖拉機的液壓機械傳動系統(tǒng)[14-16]。倪向東等進行了拖拉機液壓機械特性分析和速比跟蹤控制等研究[17-19]。唐新星等提出了工程車輛、裝載機等的液壓機械傳動方案,豐富了液壓機械的構型方案[20-23]。魏超等提出了液壓機械段內速比跟蹤控制方法,使發(fā)動機工作在期望區(qū)域[24-25]。楊樹軍等提出了改善換段品質以及全功率換段的方法[26-27]。胡紀濱等分析了液壓機械變速器的轉速及效率[28-29]。
為了深入研究液壓機械無級傳動機構運動特性對整車性能的影響,本文以液壓機械無級傳動機構為研究對象,分析液壓機械傳動功率分匯流形式以及發(fā)動機、液壓元件等外力構件的布置形式。在此基礎上,進行兩段式液壓機械無極傳動機構段內液壓元件轉速與輸出轉速的對應關系及段間輸出轉速銜接規(guī)律的研究,以確定段內傳動比和連續(xù)換段條件。
1 液壓機械無極傳動功率分匯流形式
根據(jù)液壓元件與傳動機構連接位置的不同可以將液壓機械傳動的功率流分為4類:分矩匯速型、分速匯速型、分速匯矩型和分矩匯矩型。分矩匯矩型行星傳動機構由于不能調節(jié)轉速,實際應用較少。因此,本文對分矩匯速型、分速匯速型和分速匯矩型三種分匯流形式進行研究。其分匯流形式如圖1所示,其中:P1、P2為液壓元件,P1為泵,P2為馬達。
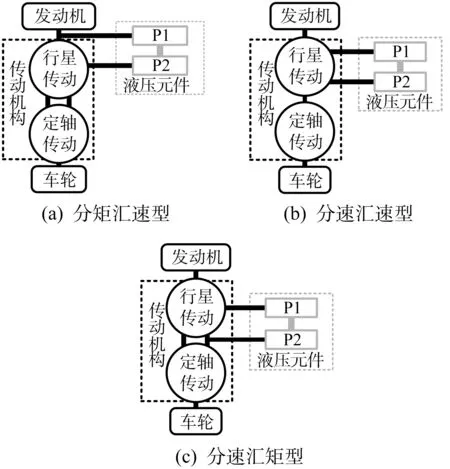
圖1 液壓機械傳動機構的分匯流形式Fig.1 Form of split and confluence of hydro-mechanical transmission mechanism
1.1 分矩匯速型
在分矩匯速型傳動機構中,一個液壓元件實現(xiàn)分匯轉速功能,另一個液壓元件實現(xiàn)分匯轉矩功能。用于分匯轉速的P2與行星排元件獨立連接,用于分匯轉矩的P1 與發(fā)動機共同連接在同一行星排元件上,輸出端與行星排元件獨立連接,如圖1(a)所示。因此,行星機構中只需1個行星排即可形成分矩匯速型復合傳動。由于P1作為分匯轉矩功能元件與發(fā)動機連接,轉速不能為零,因此只有當P2 的轉速為零時,該傳動機構才能獲得1個機械點。
1.2 分速匯速型
在分速匯速型傳動機構中,2個液壓元件均實現(xiàn)分匯轉速功能。發(fā)動機、2個液壓元件和輸出端分別與行星排的4個元件相連,如圖1(b)所示。因此,行星機構中至少需要2個行星排才能形成分速匯速型復合傳動。由于2個液壓元件均不與輸入端和輸出端連接,而各自與行星排元件相連,因此分速匯速型傳動機構在2個液壓元件轉速分別為零時可以各實現(xiàn)1個機械點。
1.3 分速匯矩型
在分速匯矩型傳動系統(tǒng)中,一個液壓元件實現(xiàn)分匯轉速功能,另一個液壓元件實現(xiàn)分匯轉矩功能。用于分匯轉速的P1與行星排元件獨立連接,用于分匯轉矩的P2 與輸出端共同連接在同一行星排元件上,發(fā)動機與行星排元件獨立連接,如圖1(c)所示。因此,行星機構中只需1個行星排即可形成分速匯矩型復合傳動。由于P2作為分匯轉矩功能元件與輸出端連接,轉速不能為零,因此只有當P1轉速為零時,該傳動機構才能獲得1個機械點。
2 兩段式液壓機械無極傳動的形式
2.1 行星排特性分析
單排行星排包含太陽輪、齒圈、行星架三個基本元件,即具有3個可對外傳遞功率的端口,因此包含3個轉速自由度。又因該3個元件須滿足轉速方程(1)和(2),故每個行星排的實際轉速自由度數(shù)為2。

式中:ωS、ωR、ωC分別為太陽輪、齒圈、行星架的轉速;k為行星排的特征參數(shù)。
當2 排行星排之間的任意2 個元件固定聯(lián)接為同一構件時,機構轉速自由度數(shù)減1,端口數(shù)減1。由此可推導行星機構轉速自由度數(shù)和端口數(shù)的計算公式為:
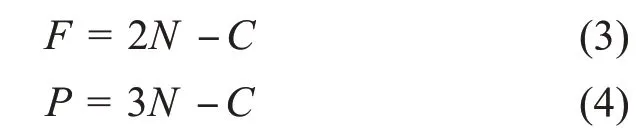
式中:F、P、N、C分別表示行星機構的轉速自由度數(shù)、端口數(shù)、行星排數(shù)和元件固定連接數(shù)。
因此,單行星排可實現(xiàn)分速匯矩型和分矩匯速型傳動,二自由度二行星排(表示為“2F2N”)可實現(xiàn)分速匯速型傳動。因此,只需2F2N行星傳動機構便可實現(xiàn)復合傳動的分匯流功能,將發(fā)動機控制在經(jīng)濟區(qū)間或動力區(qū)間內工作。
2.2 外力構件位置分析
在多模式液壓機械傳動中,發(fā)動機、液壓元件和輸出端與行星機構的連接位置不同,那么在實現(xiàn)指定傳動功能時對泵和馬達的要求不同。杠桿法是分析行星齒輪傳動機構運動特性的一種直觀方法。利用該法可以方便求得傳動機構在各種模式下的傳動比以及各構件的轉速、轉矩。根據(jù)杠桿法可以將2F2N行星傳動機構表示成四點杠桿,發(fā)動機(I)、輸出端(O1和O2)分別連接在不同的支點上,液壓元件既可以連接于獨立支點又可以與發(fā)動機或輸出端連接于同一支點。當發(fā)動機和輸出端連接的支點之間不存在液壓元件連接的支點時,可生成2個正的機械點,如圖2(a)所示;否則,會生成負的機械點,如圖2(b)所示。因此發(fā)動機和輸出端連接的支點之間不能存在液壓元件連接的支點。
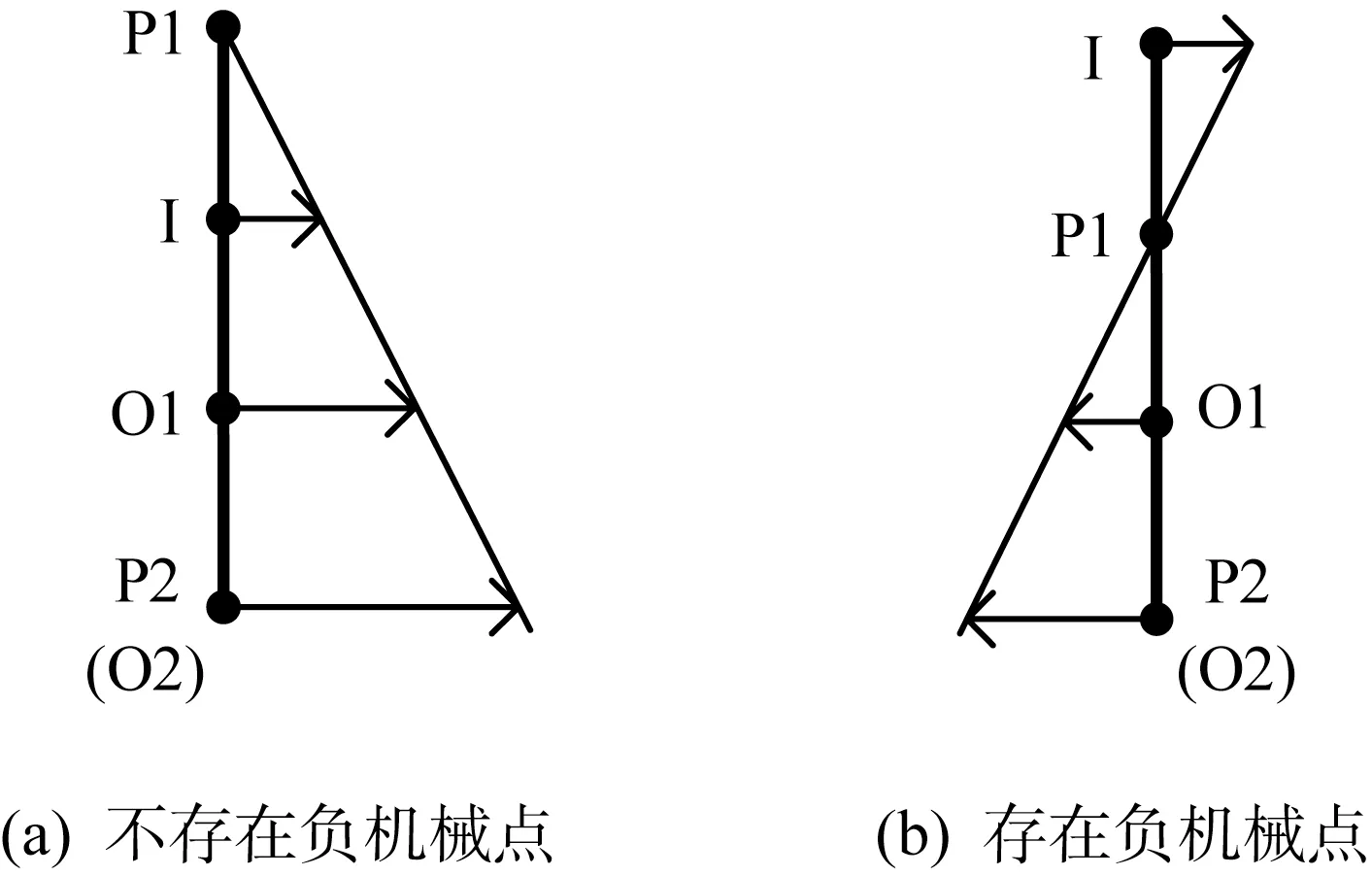
圖2 發(fā)動機和輸出端位置對機械點分布的影響Fig.2 Influence of engine and output position on mechanical point distribution
除了發(fā)動機和輸出端連接的支點外,四點桿圖中只剩下1個支點,因此,一個液壓元件必然與輸入端或輸出端相連,實現(xiàn)分匯轉矩功能,另一個液壓元件必然連接于獨立支點,實現(xiàn)分匯轉速功能。若2個輸出端的連接支點位于發(fā)動機連接支點的一側,則2個輸出端形成的復合傳動類型相同,無法實現(xiàn)液壓元件正反相位連續(xù)工作,如圖3(a)所示。因此,發(fā)動機連接的支點應位于2個輸出端連接支點的中間,如圖3(b)所示。
綜上,根據(jù)四點杠桿圖中外力構件的連接情況,復合傳動的功率流類型有3種:分速匯矩+分速匯速、分矩匯速+分矩匯速和分速匯速+分速匯矩,如圖4所示。

圖3 發(fā)動機和輸出端位置對液壓元件正反相位的影響Fig.3 Influence of engine and output position on positive and negative phases of hydraulic components
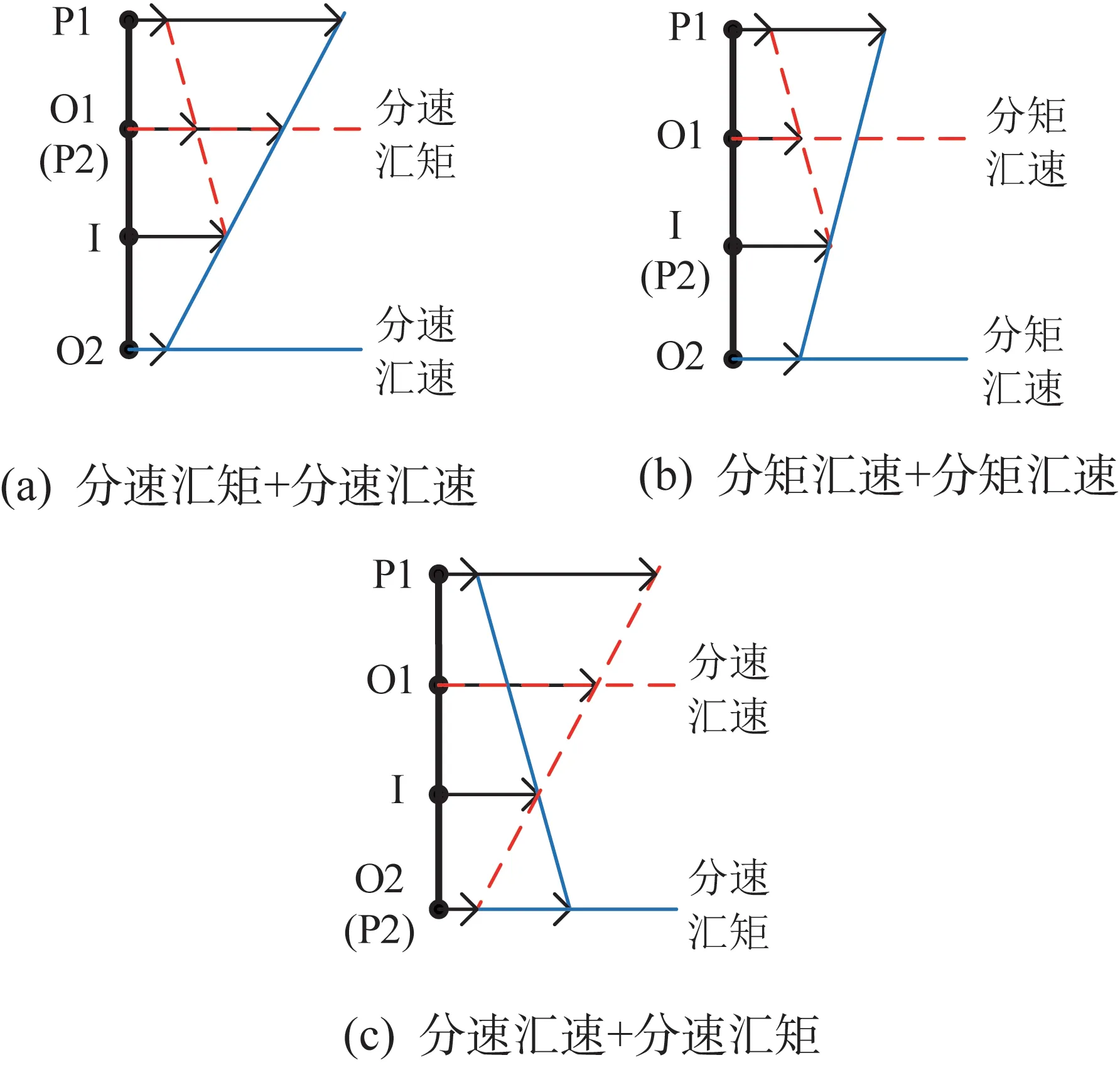
圖4 外力構件的連接情況及復合傳動的功率流類型Fig.4 Connection of external force components and power split type of compound transmission
由圖4可知,復合傳動中P1、O1、I、O2在四點杠桿圖中的連接位置是固定不變的,依次為第1、第2、第3和第4支點。根據(jù)P2在四點杠桿圖中的不同位置可以形成不同的復合傳動:若P2連接于第2支點,即與O1 相連,則形成分速匯矩+分速匯速型復合傳動;若P2連接于第3支點,即與I相連,則形成分矩匯速+分矩匯速型復合傳動;若P2 連接于第4 支點,即與O2相連,則形成分速匯速+分速匯矩型復合傳動。
3 復合傳動運動特性的理論分析
復合傳動的基本特征是液壓元件往返于連續(xù)無級變速的每一行程,通過控制輸出端的位置,得到逐段連續(xù)增大的輸出轉速。所謂轉速連續(xù),是指逐段輸出轉速基本連續(xù),并且在換段過程中離合器轉速基本同步銜接。例如:在分矩匯速+分矩匯速型復合傳動中,液壓元件由零速開始向正負兩方向無級變速的第1段為純液壓的單流階段H,然后從相鄰的第2段H1開始進入分匯流階段,如圖5所示。根據(jù)輸出端的不同位置形成不同的液壓機械段。
定義O1與I之間的長度為x,O2與I之間的長度為y,P1 與O1 之間的長度為1,如圖6 所示。則P1、O1、I、O2之間的轉速關系為:
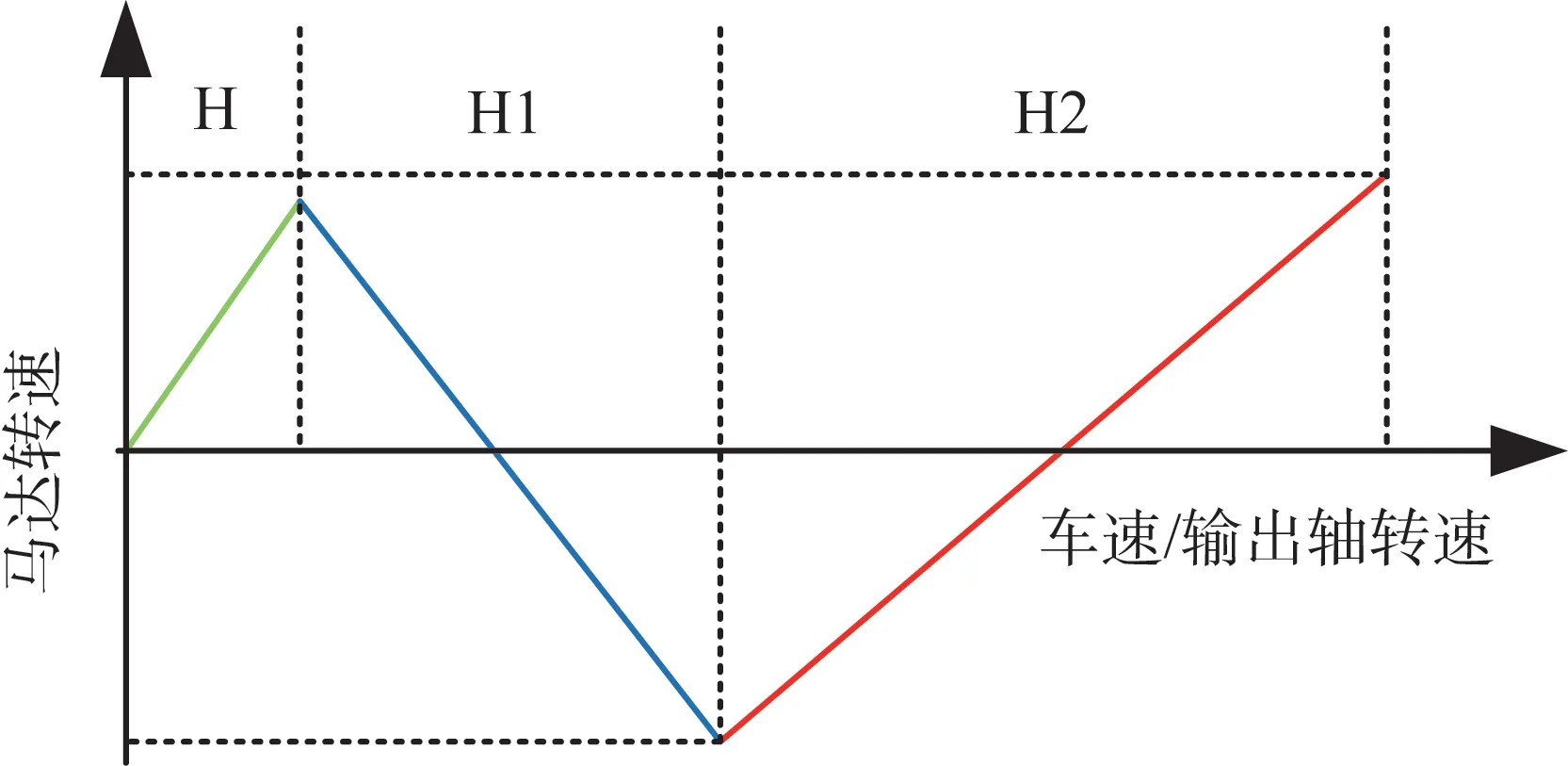
圖5 液壓機械無級傳動段間銜接轉速示意Fig.5 Schematic of connection rotation speed between segments of HMCVT
式中:nI、nP1、nO1、nO2分別為I、P1、O1和O2的轉速;iI、iP1、iO1、iO2分別為I、P1、O1、O2與行星排元件之間的傳動比。
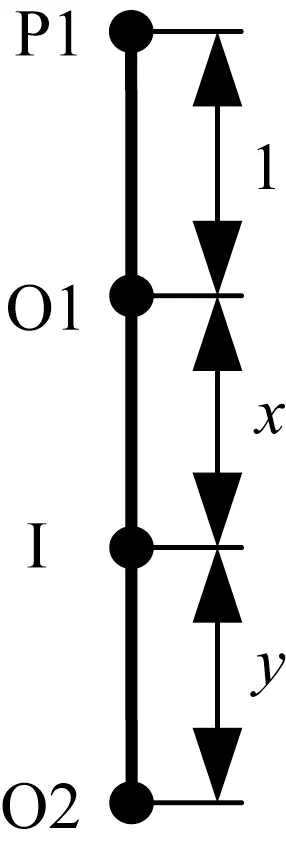
圖6 四點杠桿圖中支點間距示意Fig.6 Schematic of distance between fulcrums in four point leverage diagram
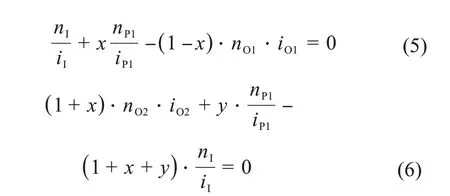
經(jīng)變換可以得到nO1、nO2與nP1的關系為:
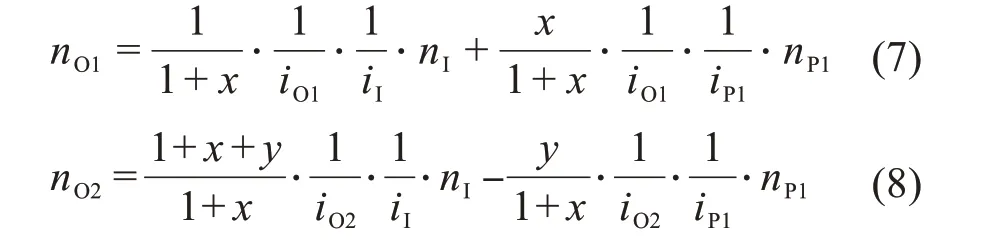
由式(7)和式(8)可知:保持nI不變,則nO1與nP1有相同的變化趨勢,即nO1隨著nP1的增大而增大;nO2與nP1有相反的變化趨勢,即nO2隨著nP1的減小而增大。
為了保證零速差換段,在液壓機械I段與液壓機械Ⅱ段轉換時,2個輸出端轉速nO1和nO2應相同,即:

由式(5)、式(6)和式(9)可得I段、Ⅱ段換段時的輸出轉速nO為:

此時,nP1應達到最大值nP1,max。將式(10)代入式(5)、式(6),可得:

3.1 分速匯矩+分速匯速型復合傳動
分速匯矩+分速匯速型復合傳動時P2 與O1 相連,如圖7所示。液壓元件的排量須協(xié)調控制。液壓機械I段為分速匯矩段,O1為輸出端。在保證發(fā)動機轉速穩(wěn)定的同時,通過增大nP1實現(xiàn)輸出轉速連續(xù)增大。當nP1達到正向最大值時,液壓機械I段斷開,液壓機械Ⅱ段連接。液壓機械Ⅱ段為分速匯速段,O2為輸出端,在保證發(fā)動機轉速穩(wěn)定的同時,通過減小nP1實現(xiàn)輸出轉速的增大。
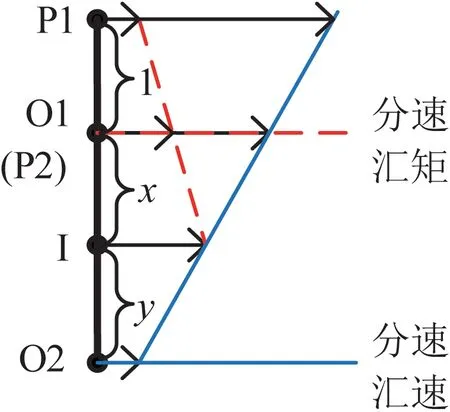
圖7 分速匯矩+分速匯速型復合傳動機構的支點位置Fig.7 Fulcrum position of the compound transmission mechanism of split-speed confluence-torque and split-speed confluence-speed
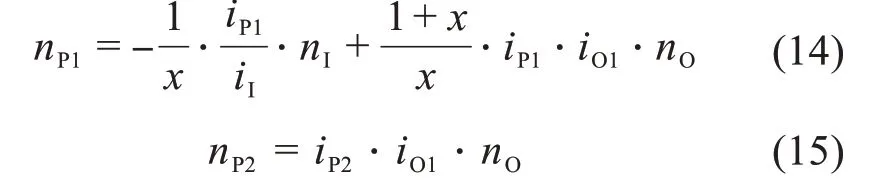
在液壓機械I段,滿足:
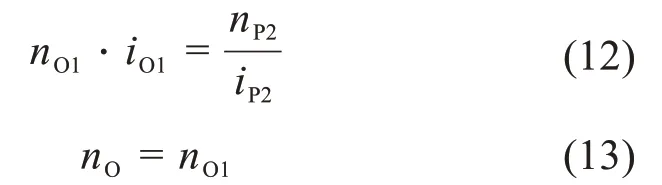
式中:nP2為P2轉速;iP2為P2與行星排元件之間的傳動比。
由式(5)、式(6)、式(12)和式(13)可獲得在液壓機械I段液壓元件與輸出端的轉速關系為:
在液壓機械Ⅱ段,滿足:
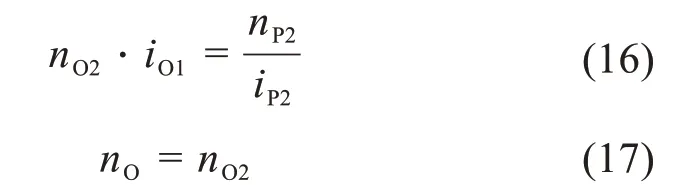
由式(5)、式(6)、式(16)和式(17)可獲得在液壓機械Ⅱ段液壓元件與輸出端的轉速關系為:
分速匯矩+分速匯速型復合傳動時液壓元件轉速與輸出轉速的關系如圖8所示。

圖8 分速匯矩+分速匯速型復合傳動時液壓元件轉速與輸出轉速的關系Fig.8 Relationship between the rotation speed of hydraulic components and the output rotation speed in the compound transmission of split-speed confluence-torque and split-speed confluence-speed
3.2 分矩匯速+分矩匯速型復合傳動
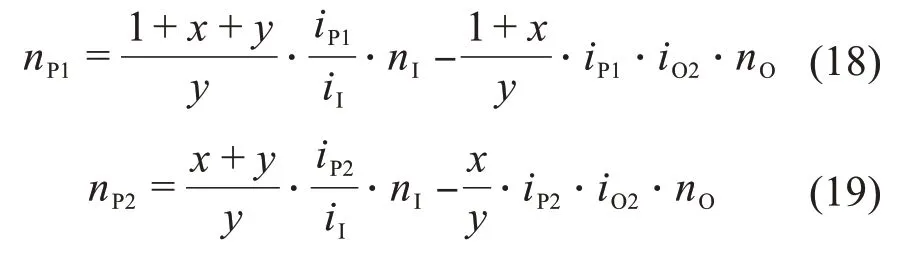
分矩匯速+分矩匯速型復合傳動時P2與I相連,如圖9所示。因此,只須控制nP1。由于I直接與P2相連,可以設置純液壓段起步。在純液壓段,由I 驅動P2,通過液壓路將功率傳遞給P1,P1 直接驅動車輛等裝備行駛。當nP1達到正向最大值時,純液壓段轉換到液壓機械I段。液壓機械I段為分矩匯速段,O2為輸出端,在保證發(fā)動機轉速穩(wěn)定的同時,通過減小nP1實現(xiàn)輸出轉速的增大。當nP1達到反向最大值時,液壓機械I段斷開,液壓機械Ⅱ段連接。液壓機械Ⅱ段為分矩匯速段,O1為輸出端,在保證發(fā)動機轉速穩(wěn)定的同時,通過增大nP1實現(xiàn)輸出端轉速的增大。
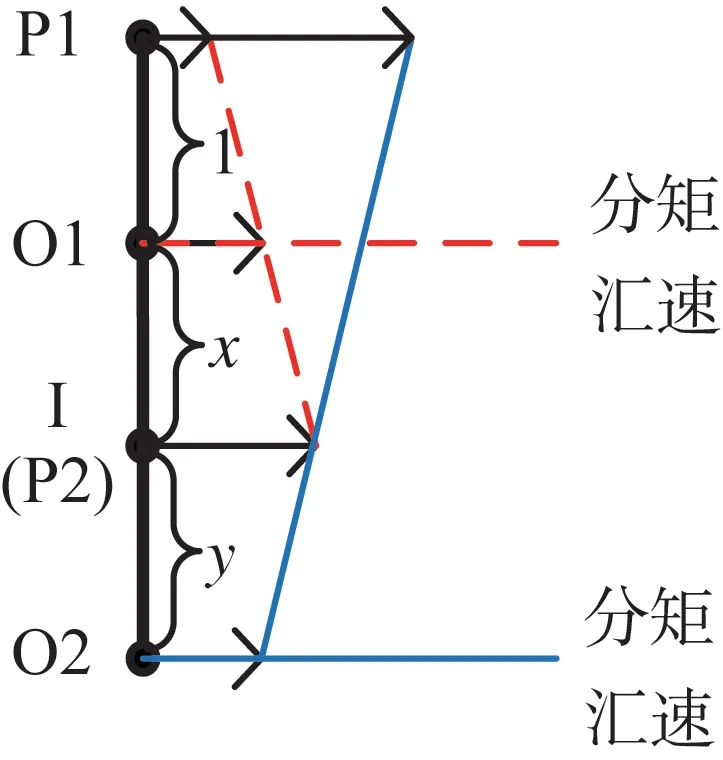
圖9 分矩匯速+分矩匯速型復合傳動機構的支點位置Fig.9 Fulcrum position of the compound transmission mechanism of split-torque confluence-speed and split-torque confluence-speed
在液壓機械I段,滿足:

由式(5)、式(6)、式(20)和式(21)可獲得在液壓機械I段液壓元件與輸出端的轉速關系為:
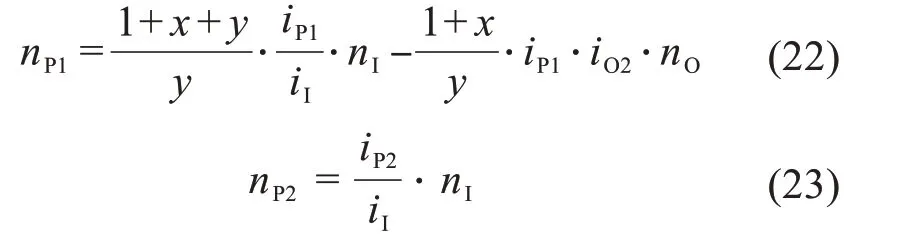
在液壓機械Ⅱ段,滿足:
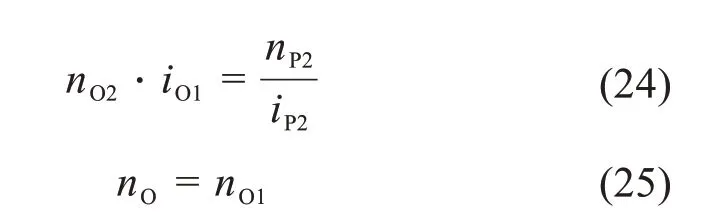
由式(5)、式(6)、式(24)和式(25)可獲得在液壓機械Ⅱ段液壓元件與輸出端的轉速關系為:
分矩匯速+分矩匯速型復合傳動時液壓元件轉速與輸出轉速的關系如圖10所示。
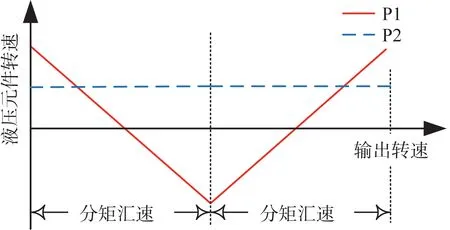
圖10 分矩匯速+分矩匯速型復合傳動時液壓元件轉速與輸出轉速的關系Fig.10 Relationship between the rotation speed of hydraulic components and the output rotation speed in the compound transmission of split-torque confluence-speed and split-torque confluence-speed
3.3 分速匯速+分速匯矩型復合傳動
分速匯速+分速匯矩型復合傳動時P2 與O2 相連,如圖11所示。液壓元件的排量須協(xié)調控制。液壓機械I段為分速匯速段,O1為輸出端。在保證發(fā)動機轉速穩(wěn)定的同時,通過增大nP1實現(xiàn)輸出端轉速的增大。當nP達到正向最大值時,液壓機械I段斷開,液壓機械Ⅱ段連接。液壓機械Ⅱ段為分速匯矩段,O2為輸出端,在保證發(fā)動機轉速穩(wěn)定的同時,通過減小nP1實現(xiàn)輸出端轉速的增大。
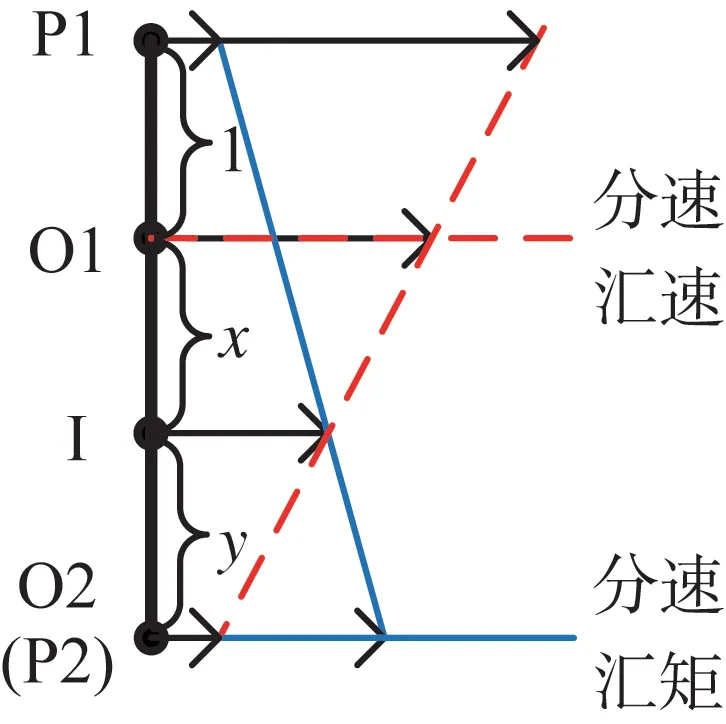
圖11 分速匯速+分速匯矩型復合傳動機構的支點位置Fig.11 Fulcrum position of the compound transmission mechanism of split-speed confluence-speed and split-speed confluence-torque
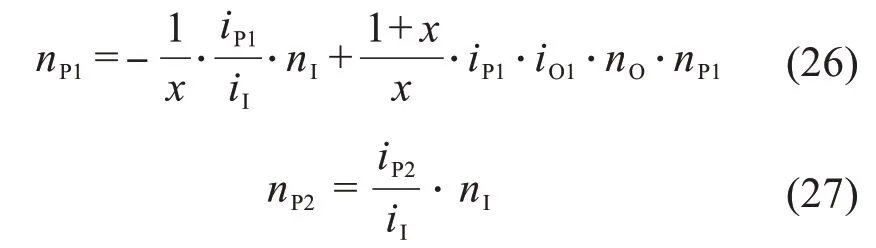
在液壓機械I段,滿足:

由式(5)、式(6)、式(28)和式(29)可獲得在液壓機械I段液壓元件與輸出端的轉速關系為:
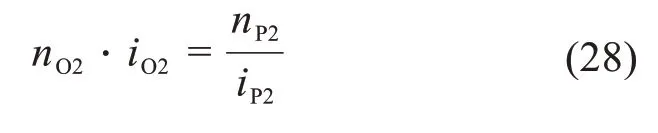
在液壓機械Ⅱ段,滿足:
由式(5)、式(6)、式(32)和式(33)可獲得在液壓機械Ⅱ段液壓元件與輸出端的轉速關系為:
分速匯速+分速匯矩型復合傳動時液壓元件轉速與輸出轉速的關系如圖12所示。
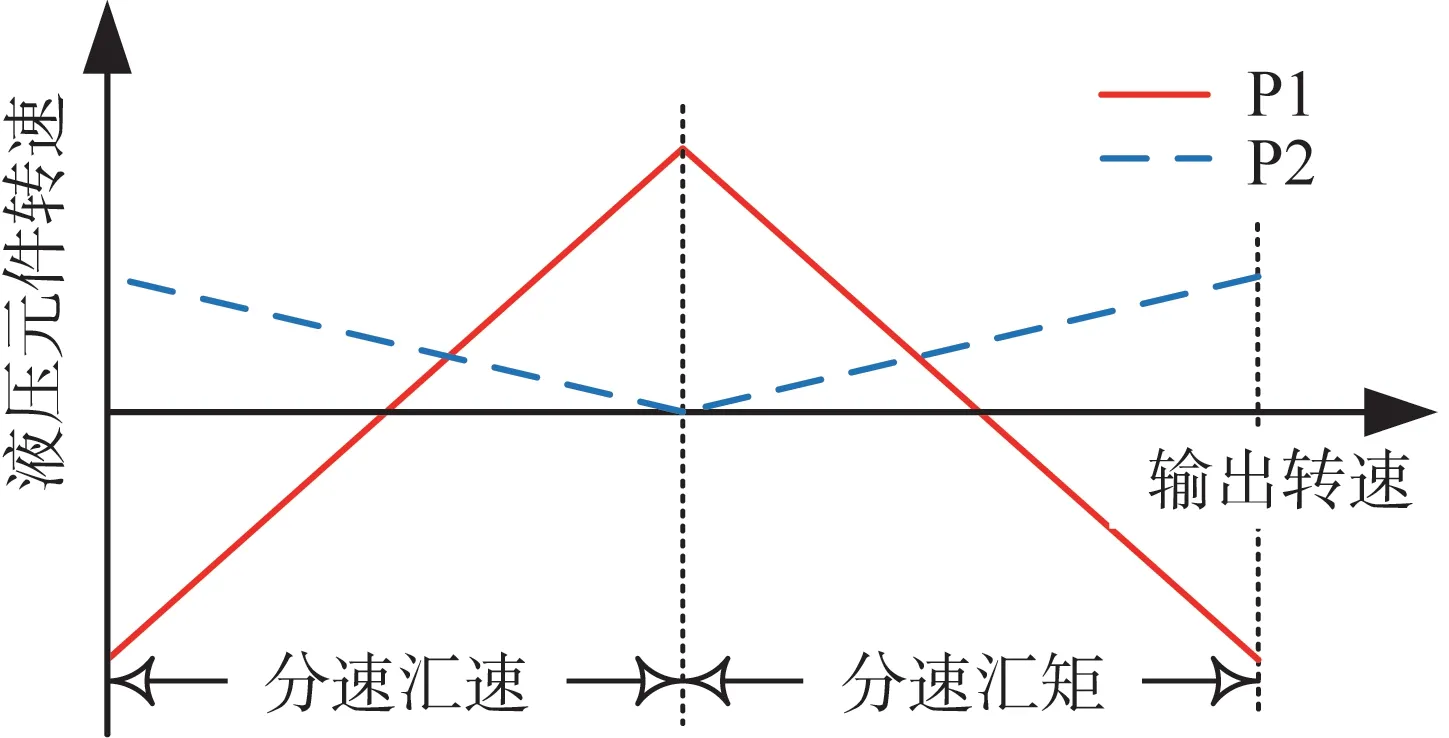
圖12 分速匯速+分速匯矩型復合傳動時液壓元件轉速與輸出轉速的關系Fig.12 Relationship between the rotational speed of hydraulic components and the output rotational speed in the compound transmission of split-speed confluencespeed and split-speed confluence-torque
4 液壓機械無級傳動的仿真分析
為了驗證上文復合傳動運動特性理論分析結果的正確性,選取某分矩匯速+分矩匯速型液壓機械無級變速器,將它應用于某ZL50 型裝載機,在MATLAB/Simulink中對該裝載機的運動特性進行仿真。
裝載機整車仿真模型和液壓機械無級變速器模型分別如圖13 和圖14 所示。裝載機的主要參數(shù)如表1所示。
4.1 轉速仿真
設發(fā)動機的轉速為額定轉速1 800 r/min,對裝載機從0 km/h至40 km/h的加速過程進行仿真,來驗證分矩匯速+分矩匯速型復合傳動運動特性理論分析結果的正確性。車速和液壓元件轉速的仿真結果如圖15所示。
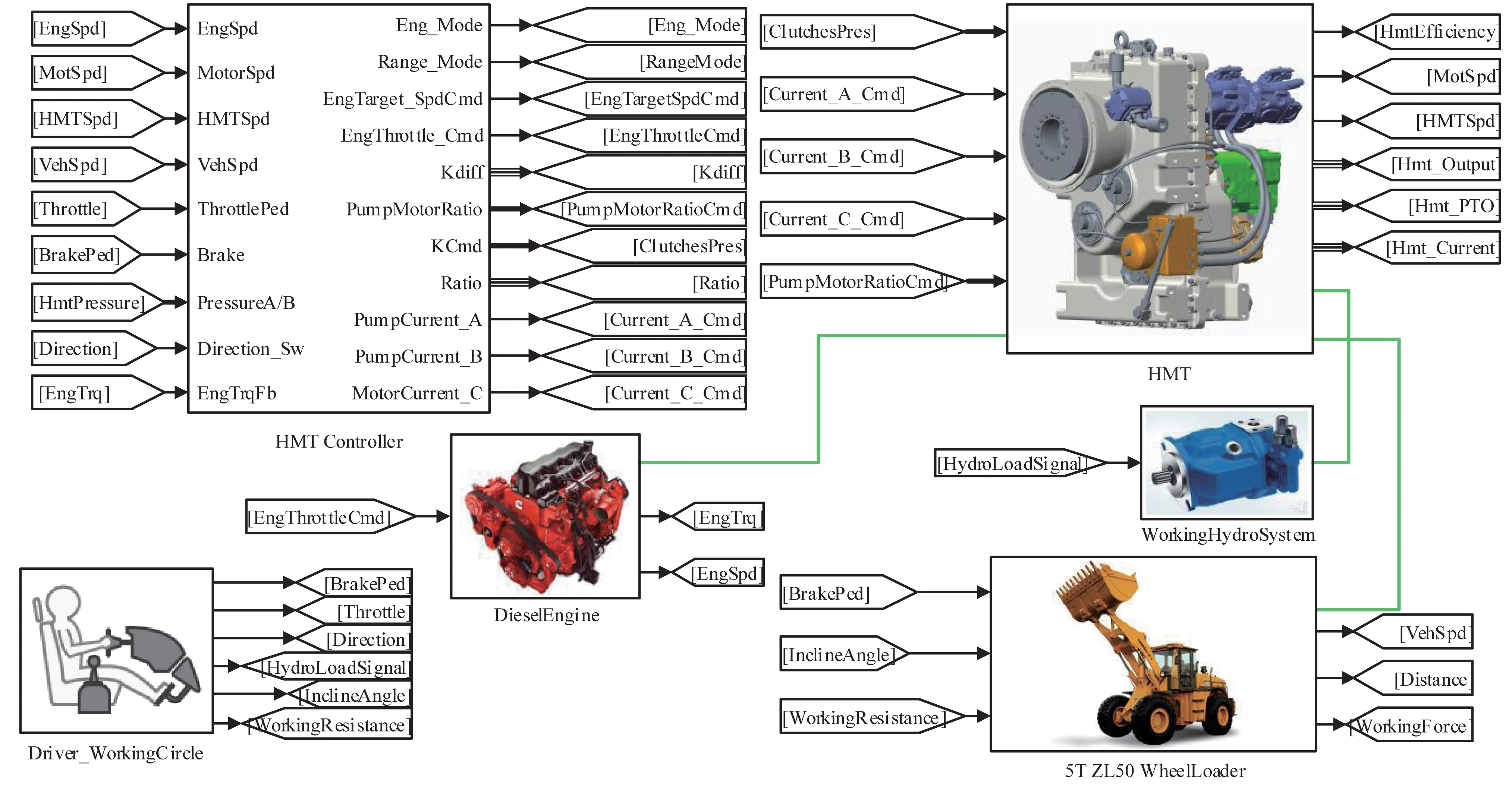
圖13 某ZL50型裝載機整車仿真模型Fig.13 Simulation model of a ZL50 loader
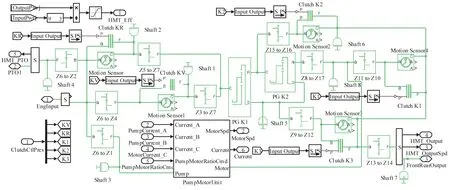
圖14 某分矩匯速+分矩匯速型液壓機械無級變速器仿真模型Fig.14 Simulation model of a hydro-mechanical continuously variable transmission of split-torque confluence-speed and splittorque confluence-speed
由圖10 和圖15 可知,仿真得到的裝載機與泵、馬達的轉速關系與理論分析結果一致,換段零速差,車速連續(xù)無級增大,可見復合傳動運動特性的理論分析是正確的。
4.2 輸出轉矩和傳動效率的仿真
選取裝載機典型V循環(huán)工況,包括加速、減速、前進和后退等階段,其速度仿真結果如圖16(a)所示。變速器輸出轉矩、傳動效率的仿真結果如圖16(b)和圖16(c)所示。
由圖16(b)可知,變速器輸出轉矩無級連續(xù)變化,最大輸出轉矩為7 600 N·m,滿足裝載機在典型V循環(huán)工況下起步、加速及工程作業(yè)的需求。由圖16(c)可知:當車速較低時,變速器工作于純液壓段,傳動效率較低;當車速較高時,變速器工作于液壓機械段,傳動效率較高。由以上仿真結果可知,分矩匯速+分矩匯速型液壓機械無級變速器可滿足裝載機的工作需求,本文提出的復合傳動機構可以應用于工程實際。
5 結 論
1)分析了液壓機械復合傳動功率分匯流的4種形式。采用杠桿法總結了外力構件的可行布置形式,獲得了分速匯矩+分速匯速型、分矩匯速+分矩匯速型和分速匯速+分速匯矩型三種兩段式液壓機械復合傳動機構的可行分匯流形式。
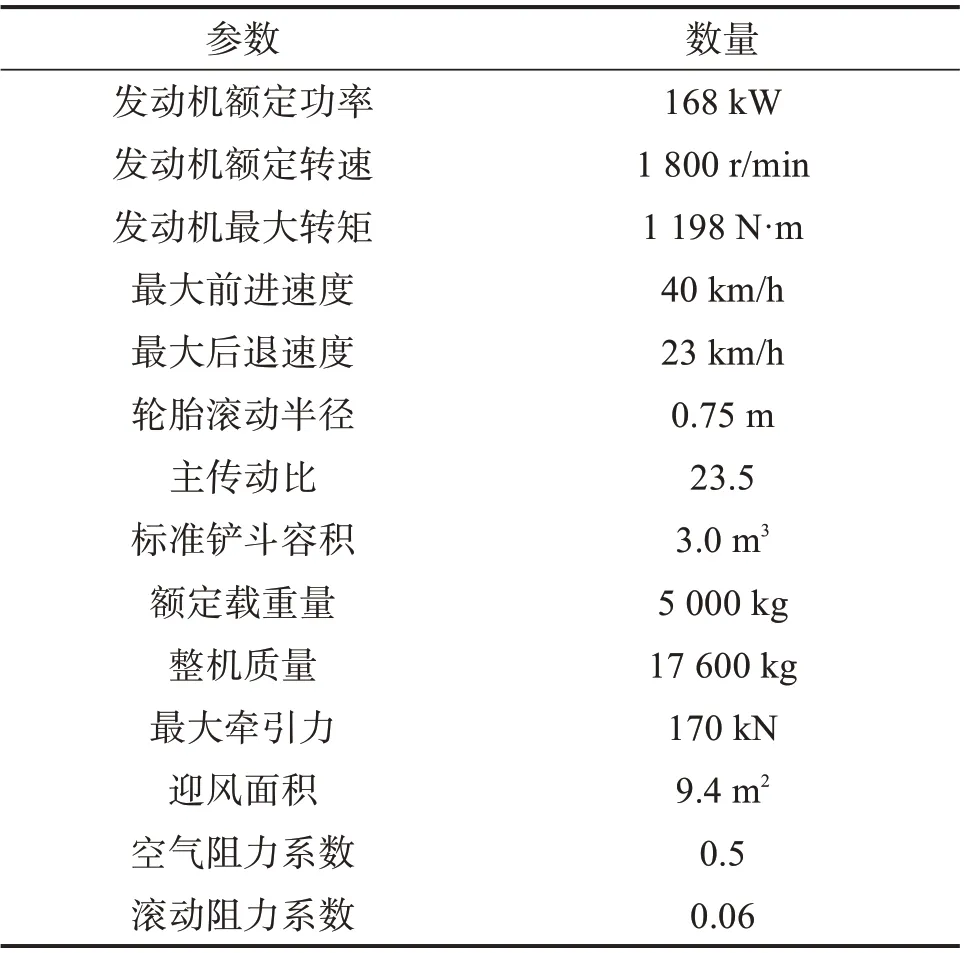
表1 某ZL50型裝載機的主要參數(shù)Table 1 Main parameters of a ZL50 loader

圖15 車速和液壓元件轉速的仿真結果Fig.15 Simulation result of vehicle speed and rotation speed of hydraulic components
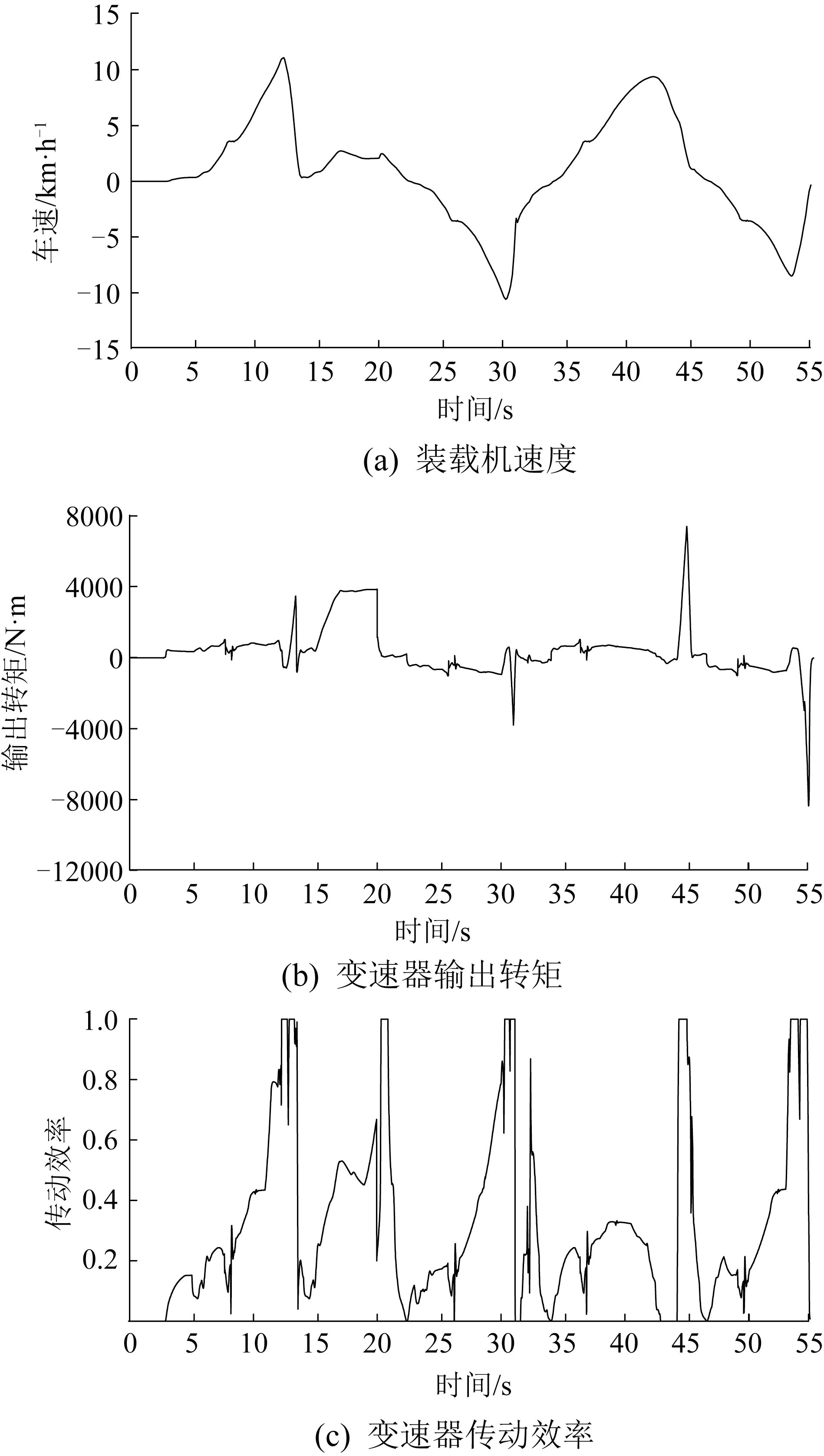
圖16 裝載機V 循環(huán)工況下變速器輸出轉矩和傳動效率的仿真結果Fig.16 Simulation result of output torque and transmission efficiency of transmission under V cycle working condition of loader
2)基于零速差換段,開展了兩段式液壓機械復合傳動機構的運動特性研究,總結了換段過程中輸出轉速、液壓元件轉速與發(fā)動機轉速的關系,以及各個段內液壓元件與輸出轉速的對應關系,實現(xiàn)了兩段式液壓機械復合傳動輸出轉速的連續(xù)無級增大。
3)將分矩匯速+分矩匯速型液壓機械無級變速器應用于某ZL50型裝載機,仿真驗證了理論分析結果的正確性。仿真結果可以為兩段式液壓機械無級傳動機構的工程應用提供參考。
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發(fā)展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09
