基于振動信號的斷路器機械零部件故障程度識別
2021-07-16 01:01:02楊秋玉阮江軍翟鵬飛
電工技術學報 2021年13期
楊秋玉 王 棟 阮江軍 翟鵬飛
(1. 福建工程學院電子電氣與物理學院 福州 350118 2. 國網河南省電力公司電力科學研究院 鄭州 450052 3. 武漢大學電氣與自動化學院 武漢 430072 4. 中能電氣股份有限公司 福州 350002)
0 引言
隨著國家電網有限公司提出“三型兩網”(“三型”即樞紐型、平臺型和共享型,“兩網”即堅強智能電網和泛在電力物聯網)的戰略目標以及南方電網公司提出的“透明電網”建設目標,越來越多的研究者開始投入到建設泛在電力物聯網/“透明電網”的相關工作中。然而,目前的電力基礎設施(如電力設備)最初并不是按照泛在電力物聯網/“透明電網”的要求進行規劃的(或者說不能滿足建設泛在電力物聯網/“透明電網”的要求):①所有相關設備與電力用戶、電網企業、發電企業、電工裝備企業等連接;②設備信息廣泛交互和充分共享;③以數字化管理大幅提高裝備制造的安全、質量、先進、效益效率水平;④通過智能傳感器,讓設備狀態透明、運行狀態透明;⑤設備具有自我感知能力。
高壓斷路器是電網中具有保護和控制功能的重要電力設備,在上述大背景下,對高壓斷路器的智能化和運行可靠性的要求越來越高,科學地評估高壓斷路器的運行狀態,不僅能夠為電力運維部門制定檢修策略提供依據,也可以為制造企業提供改進方向。
對于高壓斷路器,常見的故障類型大致可以分為電氣故障和機械故障兩類[1-3]。其中,機械零部件故障是一種常見的機械故障,包括零部件異常磨損、異常變形、斷裂等故障。零部件故障可能是由于加工工藝、裝配等因素造成的,也可能是在其運行過程中(受到內外環境的綜合作用)性能不斷退化造成的。零部件故障會導致斷路器動作性能不符合要求(如動作速度、動作時間不符合要求),嚴重時甚至會造成斷路器開斷、關合失敗等事故。當機械零部件發生早期故障時,斷路器仍可繼續運行,但若不能及時發現而導致故障程度不斷加劇,將會引起斷路器機械傳動異常,影響機械特性,最終破壞動觸頭的正常運動,進而引起開斷、關合失敗,甚至對電力系統造成影響。因此,有效判斷斷路器機械零部件的故障程度對提高斷路器的可靠性具有重要的意義。
采用斷路器分、合動作過程中產生的機械振動信號對斷路器進行故障診斷一直是國內外研究的重 點與難點。自1988年M. L. Lai[4]等首次提出利用振動信號診斷斷路器故障的優點及有效性以來,已經取得了一系列有價值的研究成果[5-13]。然而,目前的研究主要集中在對故障部位和故障類型的區分識別,而對故障嚴重程度的研究較少。實際上,斷路器機械零部件故障是一個從輕微到嚴重的演變過程,準確識別故障演變過程對保證斷路器安全運行有著重要的意義。文獻[14]提出根據高壓斷路器的行程信號進行分閘彈簧故障程度診斷,通過從行程曲線中提取平均標準方差作為因變量、以彈簧預壓縮變化量作為自變量構造擬合曲線函數,實現對分閘彈簧不同故障程度的判斷。由于引起斷路器行程信號變化的因素眾多(彈簧僅是其中一個因素),且實際彈簧故障并不能完全等效為壓縮量的改變,因此,這種擬合曲線方法的診斷精度有待進一步深入研究。文獻[15]利用集合經驗模態分解方法處理分合閘線圈電流信號,并求取能量矩相對熵作為故障程度評估指標,通過線性函數擬合不同故障程度下的熵值建立擬合曲線,從而對分閘銜鐵行程不足、分閘線圈匝間短路故障的嚴重程度進行診斷。但該方法的不能較直觀地描述線圈的故障程度、對判斷線圈何時開始出現故障以及開始出現故障時的故障特征性質等有待進一步的研究。文獻[16]通過求取斷路器振動信號多尺度排列熵偏均值作為故障程度特征量,并對不同故障程度的特征量進行三次曲線擬合,通過擬合曲線的斜率判斷故障程度。這種通過建立擬合曲線數學模型進行故障程度診斷的方法,對于不同型號斷路器的魯棒性有待進一步的深入研究。
基于上述情況,在文獻[17]的研究基礎上,本文提出了基于振動信號混沌吸引子形態特性的斷路器機械零部件故障程度識別方法,能夠有效地判斷零部件的故障程度,克服了文獻[17]研究的不足,研究結果有助于更加合理地安排檢修計劃。首先,針對現有信號分解方法——變分模態分解方法存在的不足進行了改進,提出了一種譜形態變分模態分解(Variational Mode Decomposition, VMD)方法,以對斷路器振動信號進行參數自適應分解;其次,介紹了不同動力系統的吸引子特點,從中得出吸引子對系統狀態的變化較敏感,并將其應用到斷路器機械零部件故障程度的識別中;最后,對所提出的故障程度識別方法進行試驗驗證。研究表明,所提出的故障程度識別方法能夠直觀有效地反映斷路器機械零部件故障嚴重程度。
1 譜形態變分模態分解(SSVMD)
經驗模態分解類的信號分析方法所產生的模態混疊[18-19]等問題將導致所獲信息失真,而變分模態分解可改善這些缺陷[20-22]。
VMD方法將原始信號x(t)分解為K個有限帶寬的本征模態函數(Intrinsic Mode Function, IMF),IMF可表示為

式中,Ak(t)和φk(t)分別為瞬時幅值和瞬時相位。
每個IMF分量uk(t)在中心頻率ωk處集中,帶寬可用高斯平滑偏移信號來估算,分解時對應的受約束變分模型為

式中,uk(t)滿足

引入增廣Lagrange求解上述最優解為
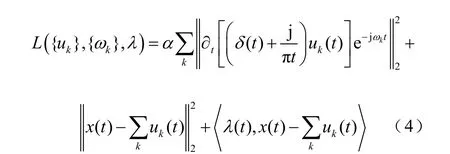
式中,λ為Lagrange算子;α為懲罰因子。
λ使用梯度下降法進行更新。
迭代停止條件為
在VMD過程中,分解層數K需要預先設定,分解結果隨K值的不同而不同,K值過大或過小均會影響分解結果的準確性。以圖1a所示的由三種不同信號組成的信號為例,采用VMD將各個成分逐一分離出來,如果分解層數K設為3,那么分解結果是正確的,如圖1b所示;如果分解層數K設為2,由圖1c可知,分解誤差比較大。

圖1 分解層數K對VMD結果的影響 Fig.1 The influence of K on VMD results
目前對如何選取合理的K值的研究相對較少,沒有形成統一的標準。特別是對于斷路器振動信號,由于很難預知信號的組成成分(即多少個K值),加之斷路器不同狀態的振動信號、不同型號斷路器的振動信號具有一定的差異性,使得根據經驗選取合理的K值具有一定的難度和局限性。
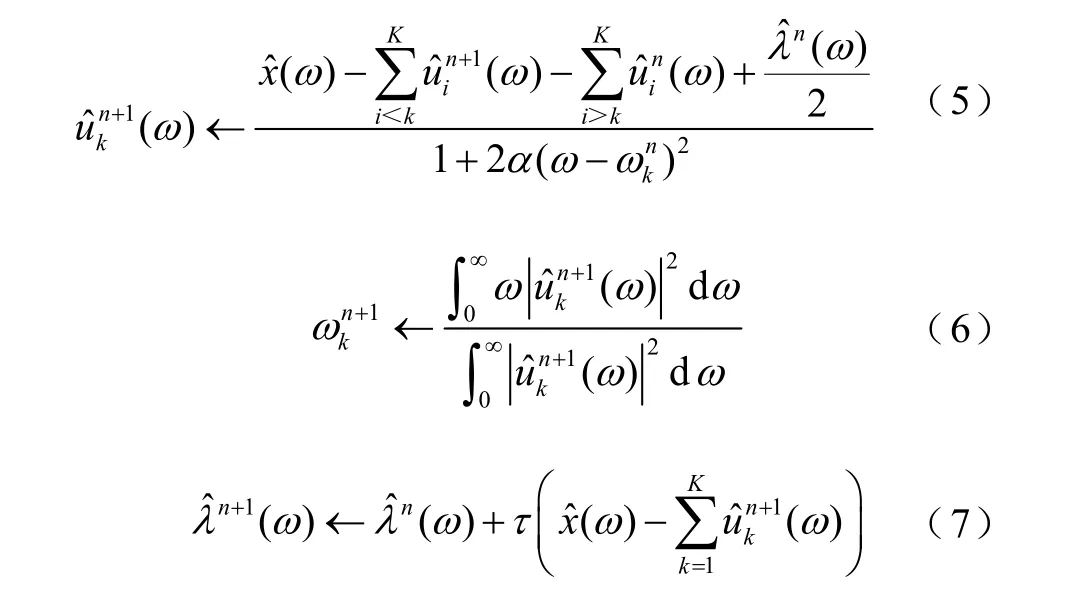
鑒于此,本文提出一種基于IMF頻譜(傅里葉譜)形態特點的K值選取方法,本文將該方法稱為譜形態變分模態分解(Spectral Shape Based Variational Mode Decomposition, SSVMD)。
SSVMD方法通過分析IMF分量的頻譜特點以確定最優K值,即如果IMF頻譜具有多個波峰N_f_peak,則說明該IMF存在多個頻率成分,意味著信號分解不徹底或不是最優的分解結果。SSVMD算法流程如圖2所示,使用時只需事先指定一個最大閾值,算法根據IMF頻譜形態特點自動確定最優K值,避免了人為選擇K值造成對分解精度的影響。
圖2 SSVMD算法流程Fig.2 Flow chart of SSVMD algorithm
2 混沌吸引子
相空間(可理解為狀態空間)給出了一種將數字轉變成圖形的方法,它把系統運動部分的每一實質信息都提取出來并繪制。在相空間中,動力系統在給定時刻的狀態歸結為一個點,這個點代表該時刻動力系統的狀態。下一時刻,系統發生變化,這個點就做出相應的運動。于是,系統的演化就可以用這個運動的點表示出來。
例如,圖3所示的無摩擦擺的相空間軌跡,擺的任一運動狀態都可以在相空間中找到與之對應的點。擺系統兩個變量(即位置和速度)的連續變化在相空間中畫出相應的軌線,相空間的每一個點對應擺的一個運動狀態,擺的往復運動使得相空間的軌跡一遍一遍地重復轉下去。

圖3 在相空間中觀察擺的運動(左:擺的運動,右:相空間軌跡)Fig.3 Observe the motion of the pendulum in phase space (Left: pendulum motion, Right: phase space trajectory)
如果擺的能量不同或存在摩擦時,相空間軌跡的形狀亦不同。例如,一個弱阻尼單擺振動的相空間軌跡如圖4所示(圖4中M為擺球質量,L為擺 線長度,C為阻尼系數),其相軌線為內縮螺旋線,表示擺的振幅隨時間衰減到零的振蕩過程。顯然,相軌線的形狀與阻尼的大小、擺線的長度、擺的質量等因素有關(即相軌線是單擺系統狀態的反映)。圖4稱為點吸引子,表明吸引子的形狀與系統的特征、運動狀態等因素有關。
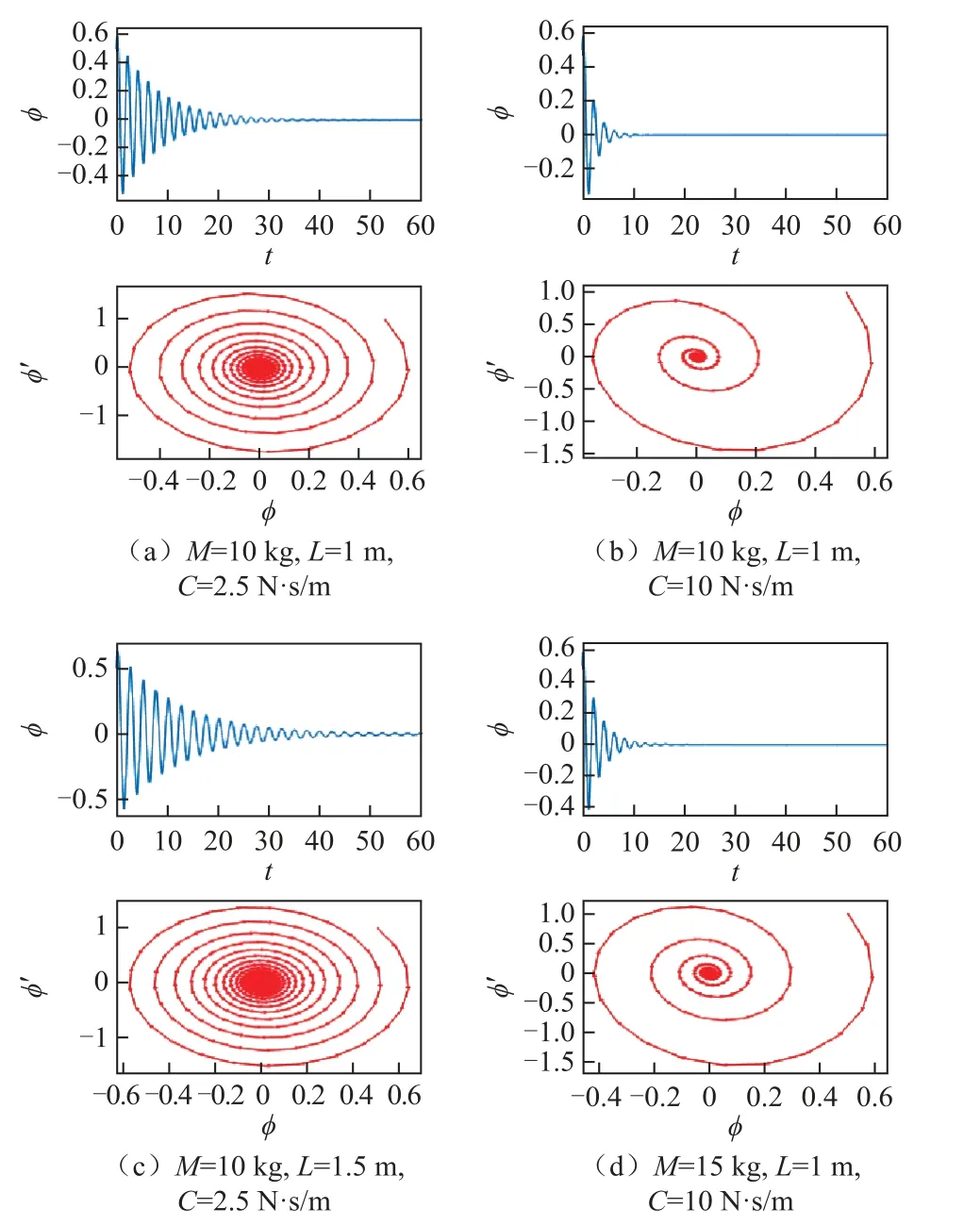
圖4 阻尼單擺吸引子Fig.4 Attractor of damped simple pendulum
簡單吸引子(吸引子包括簡單吸引子、混沌吸引子等)除了點吸引子外,還有極限環吸引子等。極限環吸引子具有一條吸引附近所有其他軌道的軌道,它表明系統從外界獲得能量的同時也在消耗能量。Van der pol振子和Duffing振子是具有極限環吸引子的典型系統,圖5所示為一Van der pol極限環吸引子(圖5a)和Duffing極限環吸引子(圖5b)。圖5中,Van der pol參數:ε=1.0(非線性阻尼);Duffing參數:γ=0.25(控制阻尼度),α=0.1(控制韌度),β=1.0(控制動力的非線性度),δ=0.92(驅動力的振幅),ω=1.0(驅動力的角頻率)。可以看出,這兩個系統的極限環吸引子表現出完全不同的形態特征,表明動力學特性不同的系統的吸引子形態差異較大。
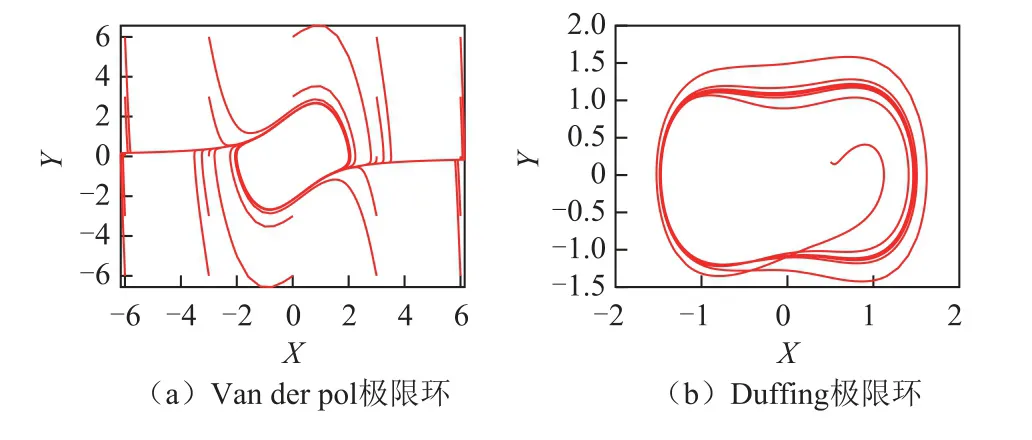
圖5 Van der pol極限環和Duffing極限環Fig.5 Van der pol limit cycle and Duffing limit cycle
隨著系統參數的不斷變化,耗散運動會出現混沌,簡單吸引子就會變為混沌吸引子。混沌吸引子的相軌線被收縮到狹小的相空間內,在狹小的空間里隨著系統的運動“糾纏不已”。圖6a所示的混沌吸引子稱為Lorentz吸引子,反映了對流模型中流體的流動狀態:當流體在一個方向轉動時,軌道處于左側;當流體反向滾動時,軌道就進入另一側。 又如圖6b所示的從Lorentz吸引子中提取一種非對稱結構的混沌吸引子,稱為Rossler混沌吸引子。若Rossler系統的參數發生變化,則該系統的吸引子形狀亦會發生相應的改變。
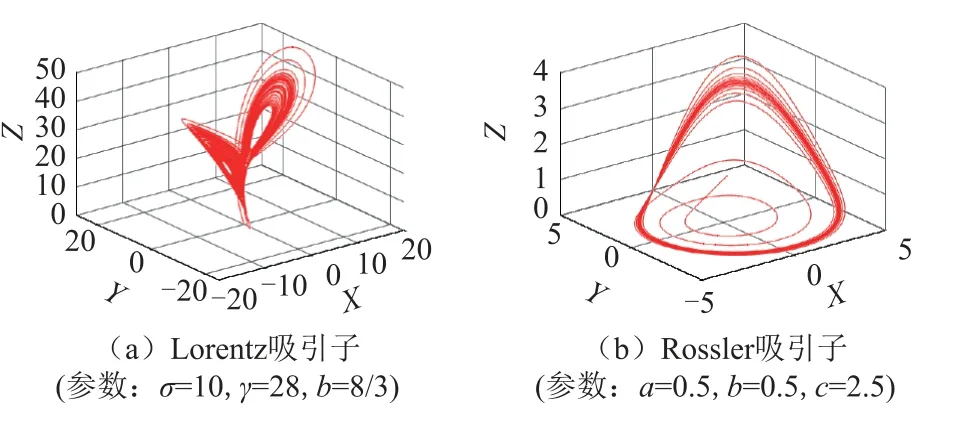
圖6 Lorentz吸引子和Rossler吸引子Fig.6 Lorentz attractor and Rossler attractor
由此得到啟發:既然吸引子形態的變化能夠反映動力系統狀態的演變情況,那么能否通過分析斷路器振動信號的吸引子形態去探究其機械狀態的變化情況?特別是,由于動力系統的微小變化會導致吸引子形態發生顯著的改變,那么是否可以利用吸引子的這種敏感性去分析斷路器零部件早期故障階段的微弱故障特征?
鑒于此,下面通過考察斷路器振動信號的混沌吸引子形態特性來提取蘊含在振動信號中的斷路器動力學信息,進而實現零部件故障程度診斷。
3 試驗驗證
文獻[17]已通過試驗證實了振動信號混沌吸引子對斷路器狀態變化的敏感性,不同故障類型的吸引子是不同的。
進一步,本文將以斷路器零部件故障的不同嚴重程度(即從正常狀態、早期故障至完全失效故障)為例,探究振動信號混沌吸引子對故障嚴重程度的敏感性及變化規律,據此希望能夠實現對斷路器零部件故障程度的有效診斷。
斷路器零部件眾多,其中一些零部件由于在斷路器分、合閘過程中受到強烈的摩擦、沖擊碰撞,導致發生故障的概率較高。圖7所示為斷路器典型的結構示意圖,圖中虛線右側為斷路器操動機構本體、左側為連接滅弧室的傳動機構,本文以操動機構中的分閘緩沖器和傳動機構中的傳動連桿連接軸銷為研究對象(圖中虛線框標記處),探究故障程度的診斷方法。選擇這兩個零部件作為研究對象的主要原因如下:
(1)分閘緩沖器直接影響斷路器動觸頭反彈幅值的大小,繼而對斷路器電氣性能和滅弧室機械壽命造成影響,嚴重時將會造成斷路器開斷失敗[8]。目前一般通過測試斷路器機械特性參數,通過反彈幅值等機械特性參數間接判斷分閘緩沖器是否存在故障,這種方法效率較低且難于發現早期故障。鑒于此,本文對斷路器分閘緩沖器的故障程度識別方法進行了試驗研究。
(2)斷路器零部件磨損,特別是零部件連接部位的磨損是不可避免的,對于某些受力復雜的連接部位,磨損更是嚴重。其中,斷路器操動機構與傳動機構之間的連接是磨損較為嚴重的部位(該處是操動機構將儲能彈簧能量傳遞給動觸頭的交匯點,如圖7所示),該部位一旦開始出現磨損,將會由于強烈的沖擊碰撞,磨損急劇增加,最終導致連接軸銷脫落,造成斷路器分、合失敗。因此,對斷路器零部件的磨損情況進行監測識別尤為重要,特別是對某些關鍵零部件磨損狀況的及時判斷。鑒于此,本文以斷路器傳動連桿孔軸磨損為例,探究其磨損程度的識別方法。
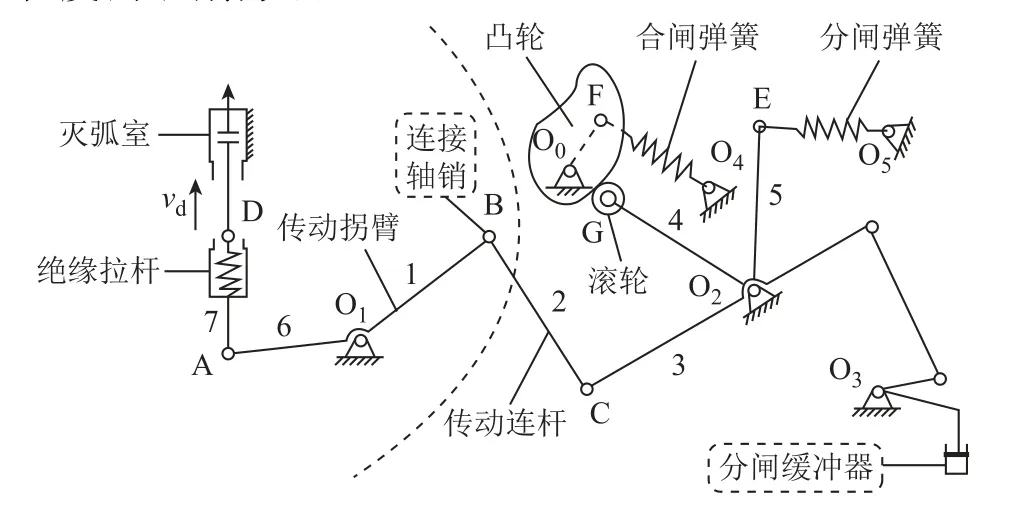
圖7 斷路器典型結構示意圖Fig.7 Typical structure of circuit breaker
下面通過兩個試驗分別進行說明,其中試驗一針對的是分閘緩沖器故障程度診斷,試驗二分析了傳動連桿孔軸磨損程度的識別方法。
3.1 試驗一
以西門子型號為3AE8174—2的真空斷路器為研究對象,搭建試驗平臺,如圖8所示。試驗平臺主要由真空斷路器、振動信號采集裝置及機械特性測試儀等組成。結合該斷路器的結構特點,一方面考慮到后續現場測試的方便,另一方面為了能夠較清晰地記錄斷路器的動作信息,本文將加速度傳感器固定在操動機構頂部的側面,具體如圖8所示。加速度傳感器(IEPE型)靈敏度為0.5mV/g(±10%)、最大量程為10 000g、頻率響應范圍為0.5~ 10 000Hz(±5%)。
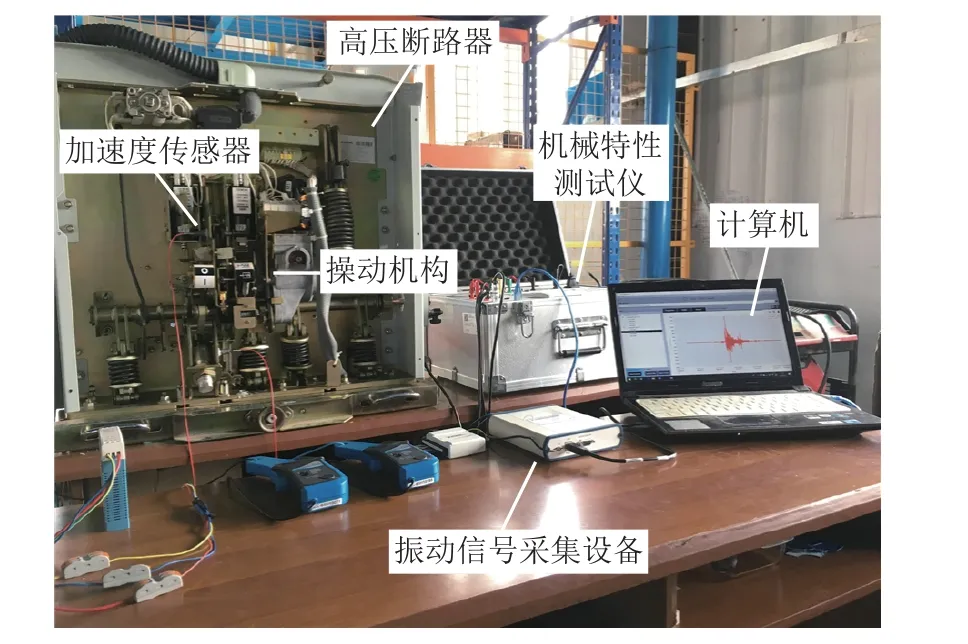
圖8 斷路器零部件故障模擬試驗平臺Fig.8 Test platform for circuit breaker component fault simulation
試驗過程中采用外接控制電源的方式控制斷路器分、合閘動作,外接控制電源為機械特性測試儀。采樣率為100 kHz,采樣時間為0.06 s。觸發方式為閾值觸發,即當振動幅值超過預先設定的觸發閾值時開始記錄并保存數據,觸發閾值設為0.01g。
斷路器實際運行過程中,分閘緩沖器由于密封老化、緊固件松動等原因導致其有效緩沖行程不斷變小,直至緩沖性能完全失效。從功能上講,分閘緩沖器發生故障的根本原因是其有效緩沖行程不能滿足要求,使得斷路器分閘機械特性值偏離廠家規定范圍。因此,可以通過調節分閘緩沖器的有效緩沖行程來模擬分閘緩沖器故障的不同嚴重程度。
如前所述,由于分閘反彈幅值是斷路器分閘動作的一個非常重要的機械特性指標,其大小直接影響滅弧室的機械壽命及開斷的成敗。因此,試驗以分閘反彈幅值為主要參考依據來評判分閘緩沖器的性能(即故障程度)。
分閘緩沖器位置及緩沖行程調節方法如圖9所示,通過調節x的大小改變分閘緩沖器的有效緩沖行程,將分閘緩沖器從正常狀態、早期故障至完全失效故障劃分為六個等級,對應表1中的分閘緩沖器狀態編號1~6。表1中,分閘緩沖器狀態編號1、2表示斷路器分閘反彈幅值在規定的正常范圍內(≤2mm),分閘緩沖器狀態正常;狀態編號3為分閘緩沖器開始出現異常的狀態,此時的分閘反彈幅值已超出規定的上限值;狀態編號4~6表示斷路器分閘反彈幅值逐漸超出上限值,表明分閘緩沖器故障程度越來越嚴重。
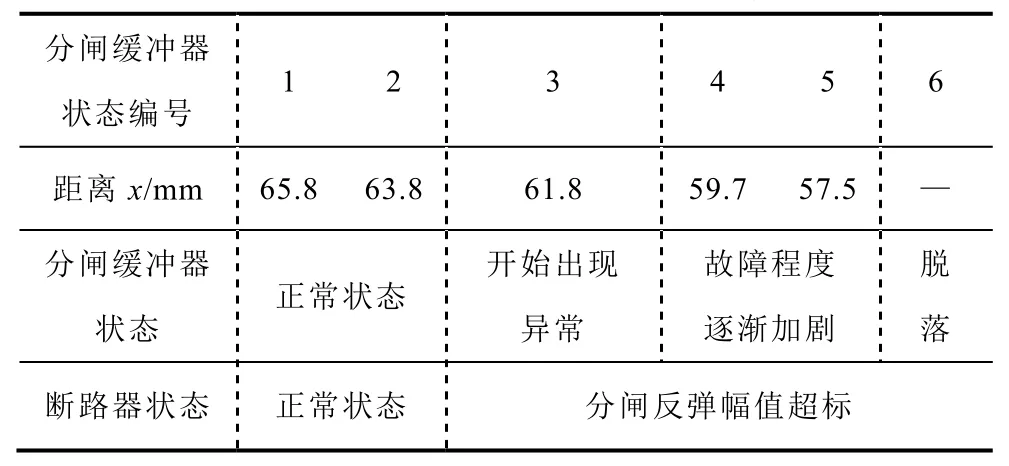
表1 分閘緩沖器狀態參數Tab.1 State parameters of the opening damper
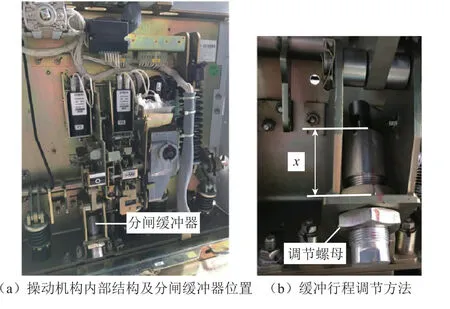
圖9 分閘緩沖器位置及緩沖行程調節方法Fig.9 Position of the opening damper and its stroke adjusting method
圖10例舉了分閘緩沖器不同狀態下的分閘振動信號,可以看到,從這些時域波形中很難辨別分閘緩沖器的狀態。
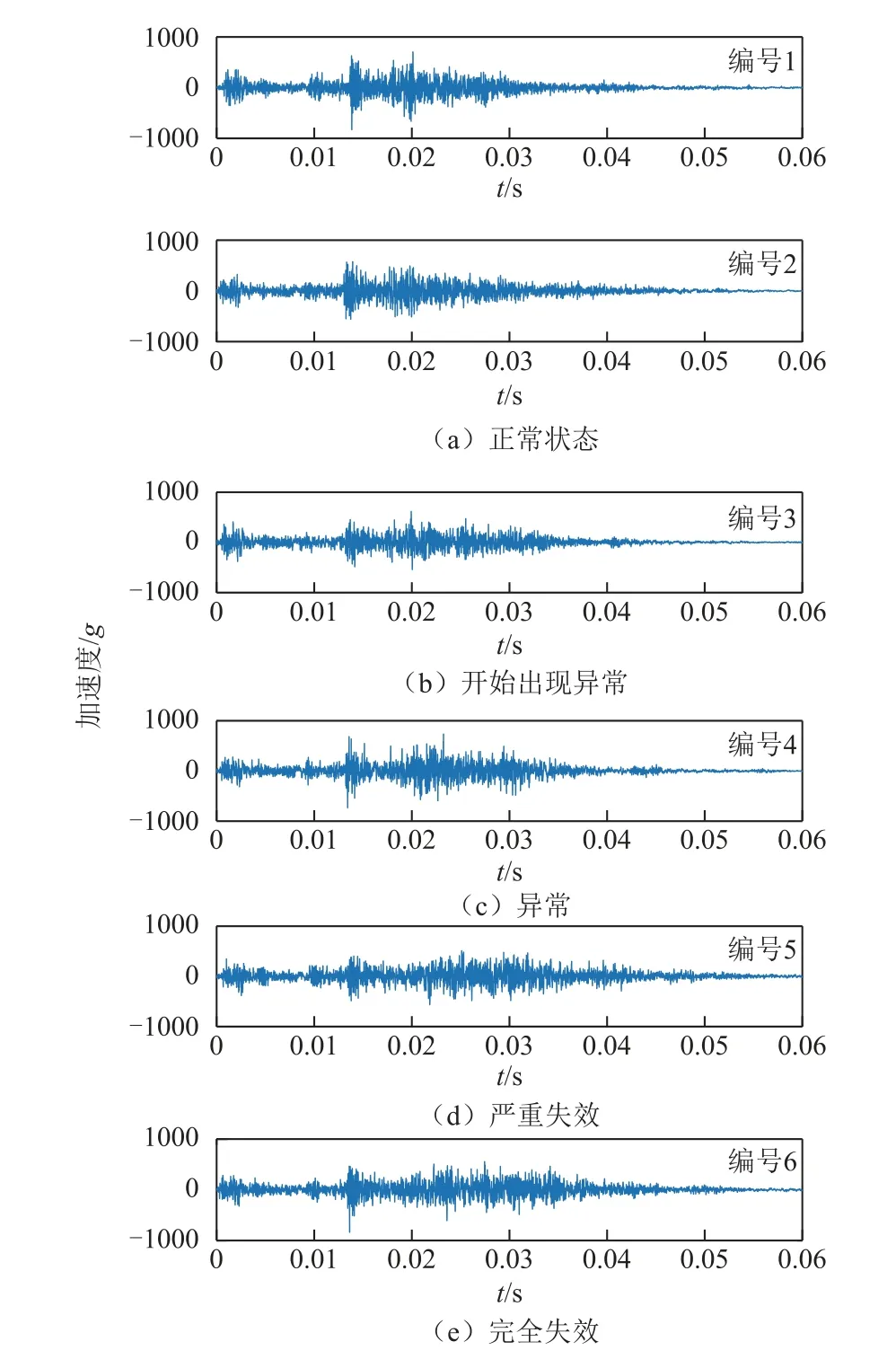
圖10 分閘緩沖器不同狀態下的分閘振動信號Fig.10 Opening vibration signals in different states of the opening damper
為了減小其他因素的干擾,提高分閘緩沖器故障特征提取的準確性,本文僅截取分閘緩沖器開始制動至分閘動作結束時段的振動信號進行分析。根據該型號斷路器的分閘時間參數、分閘緩沖器制動時刻(在30~35ms之間開始制動),截取30ms之后的振動信號,然后對截取的主要包含緩沖制動信息的振動信號進行SSVMD處理,再對SSVMD的結果進行相空間重構,得到相應的混沌吸引子,最后根據混沌吸引子的形態特征判斷分閘緩沖器故障程度。
圖11為最后得到的結果,即分閘末期振動信號的模態分量(最后一個模態分量,IMF 8)混沌吸引子隨分閘緩沖器狀態變化的演變過程。圖11a為分閘緩沖器正常狀態時的混沌吸引子、圖11b~圖11e為分閘緩沖器開始出現故障至完全失效故障情況下的混沌吸引子,可以明顯看出:
(1)緩沖器正常狀態下的吸引子軌跡緊緊收縮在一起,表明緩沖器起到了有效的緩沖作用。
(2)當緩沖器開始出現異常時,如圖11b所示,部分相軌跡開始試圖逃離吸引域;隨著緩沖器故障的不斷加劇,逃離吸引域的相軌跡越來越多、吸引子形態不斷增大(見圖11c、圖11d);最后,緩沖器完全失效,吸引子形態膨脹了起來,如圖11e所示。
(3)可以以吸引子軌道的突然開始逃離吸引域為界限,如圖11b所示,作為緩沖器開始出現故障的判據,此后若吸引子繼續增大、膨脹,說明緩沖器故障程度繼續加劇。
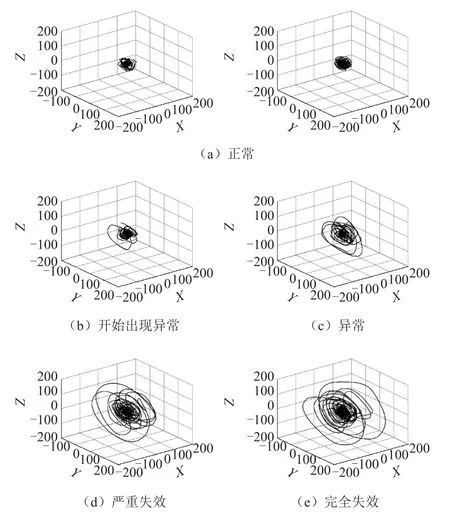
圖11 分閘緩沖器不同狀態下的模態分量混沌吸引子演化過程Fig.11 Evolution of chaotic attractor of IMF component in different states of the opening damper
3.2 試驗二
上述試驗以12kV真空斷路器為研究對象,探究并驗證了利用振動信號模態分量混沌吸引子形態特性對斷路器關鍵零部件——分閘緩沖器性能退化(即不同故障程度)進行評估的可行性。為了進一步驗證該方法的有效性,本例以一252kV高壓 SF6斷路器為研究對象(型號為LW59—252/T4000—50),探究所提方法用于診斷高壓斷路器其他零部件故障程度的效果——操動機構傳動連桿孔軸磨損程度診斷。
需要指出的是,本例故障,即傳動連桿孔軸磨損致使連接軸銷變形脫落,導致斷路器合閘失敗(操動機構與傳動機構之間的連接軸銷脫落導致操動機構動作而傳動機構及以上部分未動作),非人為設置,而是在對該斷路器開展其他試驗時,如探究儲能電機振動特征隨負載(即合閘彈簧)變化情況多次分、合所致(傳動連桿軸銷脫落時計數器顯示:398),具體將在下述討論。
試驗系統原理、斷路器操動機構內部結構及加速度傳感器固定位置如圖12所示。試驗過程中采用斷路器機械特性測試儀給儲能電機提供直流電源,并控制斷路器分、合閘。采樣率同實驗一為100kHz,采樣時間設為0.1s,信號觸發方式為閾值觸發,即當振動幅值超過預先設定的觸發閾值(0.01g)時開始記錄并保存數據。
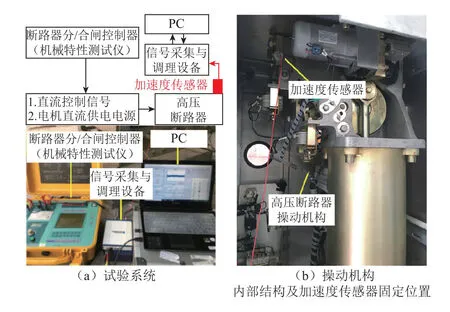
圖12 試驗系統及加速度傳感器固定位置Fig.12 Test system and position of the accelerometer
在試驗過程中,隨著斷路器動作次數的增多,連接操動機構輸出拐臂與傳動機構傳動拐臂(傳動關系如圖13所示)的傳動連桿軸孔、連接軸銷不斷被磨損(為方便描述,下面將軸孔和軸銷統稱為孔軸),隨著磨損程度的不斷加劇,軸孔逐漸擴大、軸銷不斷變形,最終,在斷路器動作了398次分合動作后軸銷突然脫落,導致斷路器合閘失敗,如圖14所示。
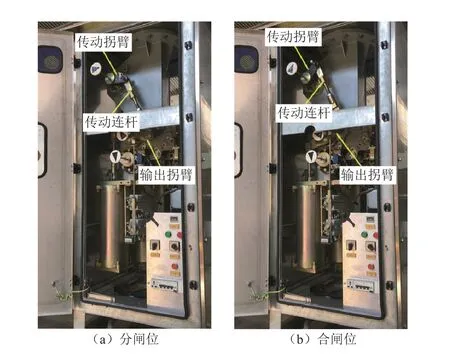
圖13 操動機構與傳動機構傳動關系Fig.13 Transmission relations between operating mechanism and transmission mechanism
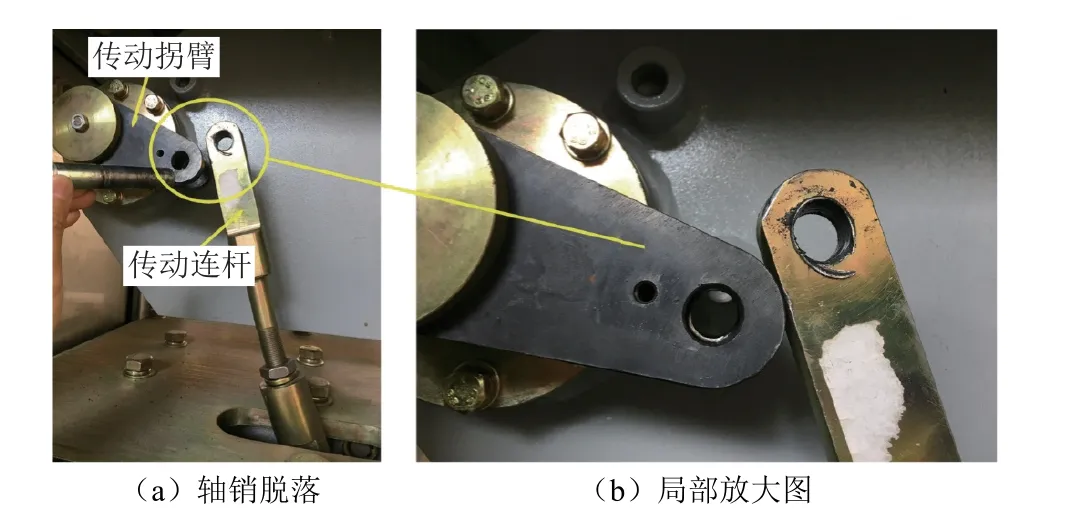
圖14 傳動連桿及傳動拐臂孔、連接軸銷磨損導致軸銷脫落故障Fig.14 The shaft pin falls off due to severe wear of the connection
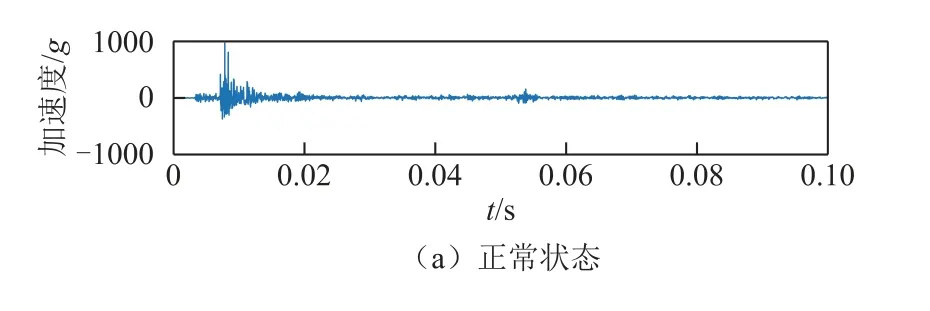
本例仍以分閘振動信號為例進行說明,圖15給出了該斷路器正常狀態和傳動連桿孔軸磨損不同程度的分閘振動信號,其中,圖15a為斷路器正常狀態時的振動信號(開展本試驗初次測試的振動信號);隨著斷路器操作次數的增多,孔軸磨損不斷加劇,相應的振動信號如圖15b所示;圖15c為連接軸銷突然脫落時的振動信號;圖15d為軸銷脫落后的振動信號,軸銷脫落后,由于傳動機構與操動機構脫離連接,導致操動機構動作而傳動機構及以上部分(包括滅弧室動觸頭等零部件)未動作,斷路器合閘失敗。可以看到,各信號之間差異并不明顯,很難直接判斷孔軸是否出現磨損、磨損程度及軸銷是否存在脫落的風險。
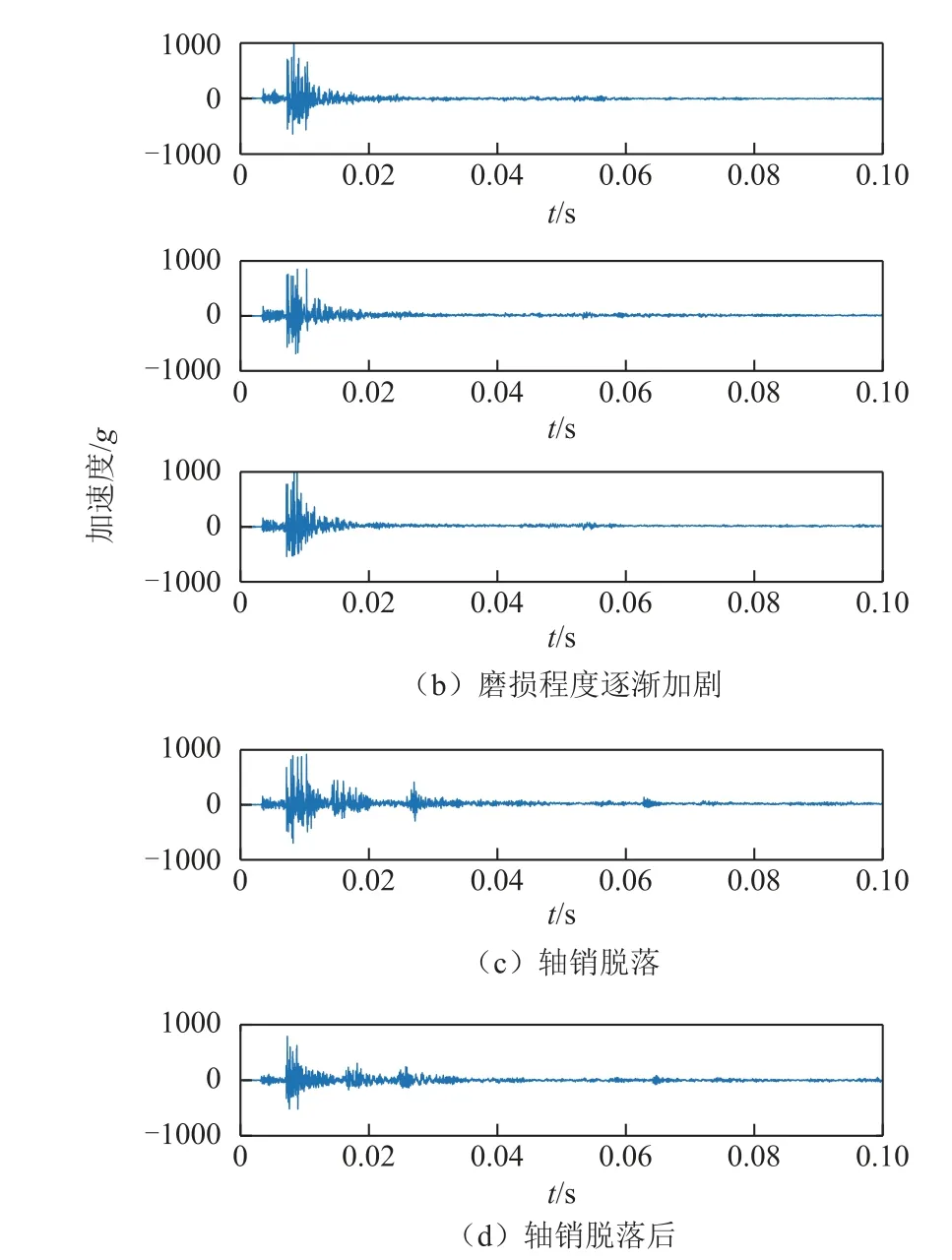
圖15 正常狀態和傳動連桿孔軸磨損不同程度下的分閘振動信號Fig.15 Opening vibration signals in normal state and different wear severity of the connection
在上述試驗一中,由于分閘緩沖器僅在斷路器動作末期起作用,因此截取了斷路器動作末期的振動信號(即緩沖制動階段的振動信號)進行分析。本例由于傳動連桿孔軸磨損對斷路器動作過程中的哪個階段產生影響暫時未知,因此需要對斷路器動作過程中各個階段的振動信號進行分析。
斷路器正常狀態下的分閘振動信號分時分割處理如圖16所示,小機械波1出現的時刻對應線圈鐵心開始運動的時刻;機械波2是由于線圈鐵心觸發鎖扣裝置使得機構被解列而引起的;機構解列后,傳動機構將能量傳遞給動觸頭快速向分閘位運動,這個階段的設計理念是機構不存在阻礙,運動相對較順暢、平穩,由于該階段與機構解列階段的界線不太明顯,因此本文以機構解列后的第一個較明顯的波谷作為機構解列階段與傳動階段的分界線;機械波4是緩沖限位裝置對機構傳動鏈進行緩沖制動而引起的。由此,參考各振動事件的起始與結束時刻,將該斷路器正常狀態下的分閘振動信號分割成如圖16所示的不同時段,即時段①為脫扣階段、②為機構解列階段、③為傳動階段、④為制動階段。傳動連桿孔軸磨損不同程度的分閘振動信號均以此為參考依據進行分時分割處理。
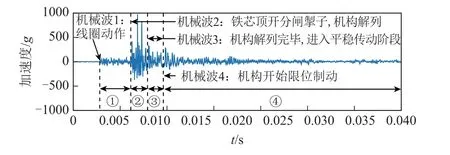
圖16 斷路器正常狀態下的分閘振動信號分時分割處理Fig.16 Division of opening vibration signal in normal state of circuit breaker
分別提取各階段的振動信號進行SSVMD處理,然后進行吸引子重構,發現其中傳動階段振動信號(即階段②)的模態分量(最后一個模態分量,IMF 6)混沌吸引子隨孔軸的磨損程度表現出一定的規律性,如圖17所示。可以明顯看出:
(1)正常狀態(孔軸不存在磨損)的混沌吸引子形態較規則,且軌跡收縮在一起,如圖17a所示。
(2)當孔軸磨損時,吸引子形態明顯伸展開來,形態變得不規則,如圖17b所示。
(3)隨著磨損的加劇,吸引子形態越來越復雜,這與磨損狀態下機構連桿運動的不穩定性相一致,如圖17c和圖17d所示。
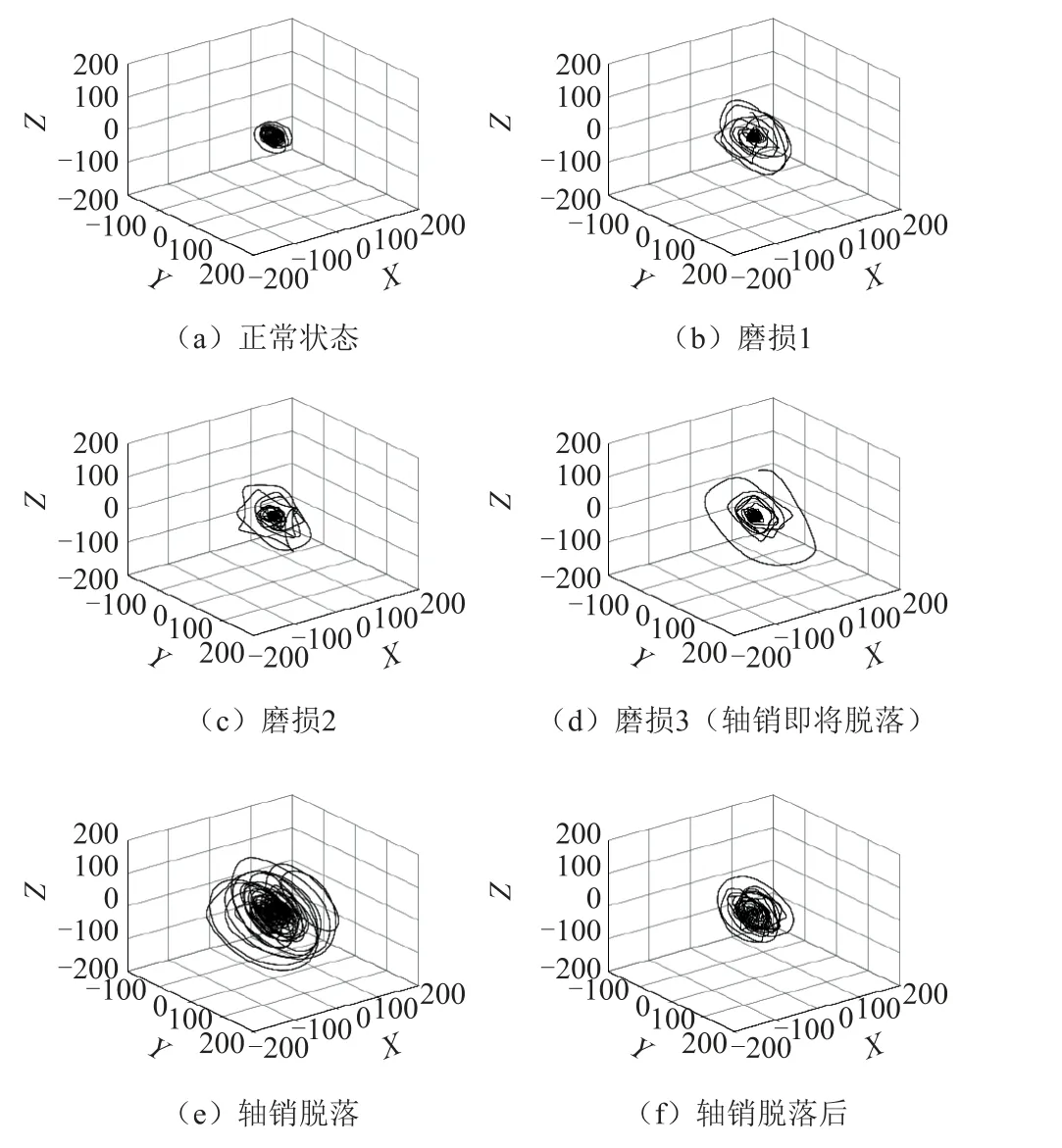
圖17 傳動連桿孔軸磨損不同程度的振動信號(傳動階段)模態分量混沌吸引子演化過程Fig.17 Evolution of chaotic attractor of IMF component in different wear severity of the connection
(4)圖17d是連接軸銷脫落前一次的混沌吸引子,可以明顯看出,該吸引子明顯異于正常時的吸引子及其他磨損狀態的吸引子,因此,可以以該吸引子的形態為界限,作為軸銷脫落的預警判據。
(5)圖17e是軸銷脫落時的混沌吸引子,其形態達到最大、軌跡最為復雜。
(6)當軸銷脫落后,如圖17f所示,吸引子形態大小反而變小,形狀復雜度降低,原因是傳動拐臂及以上傳動機構部分(包括絕緣拉桿、滅弧室動觸頭等)脫離了操動機構,操動機構動作而傳動拐臂及以上部分未動作,使得機構動力學復雜度降低。
綜合上述試驗一與試驗二,斷路器振動信號經過本文所提方法進行處理后(主要流程為:振動信號分時分割→SSVMD提取模態分量→重構模態分量混沌吸引子),能夠將蘊含在振動信號中的故障信息凸顯出來,特別是對于零部件早期故障的微弱信息,能夠以比較直觀的方式呈現出來(即能直觀反映故障程度的演變),有利于準確判斷斷路器零部件故障的嚴重程度,可為維修計劃的合理安排提供一定的參考依據。
4 對比分析
針對斷路器(機械零部件)故障程度識別的研究,國內外已有一些文獻報道[5,14-16,23],這些方法與本文方法的優缺點對比如下。
文獻[5]提出了利用振動信號的幅值和時間偏差來檢測高壓斷路器是否出現異常,該文例舉了一個實驗室模擬合閘油緩沖器漏油故障的試驗,通過改變油緩沖器油量的大小,獲取相應的振動信號,并計算振動信號的幅值和時間偏差作為油緩沖器故障的預警指標。這種方法的優點是計算相對簡單、對于發生較嚴重故障的預判可靠性較高,不足之處是需要根據具體型號斷路器設定合理的預警閾值,以及由于斷路器振動信號存在一定的分散性等原因,導致振動信號幅值和時間偏差并不一定隨故障程度的加劇而嚴格線性變化(如表2中虛線方框所示),使得對故障程度的判斷存在一定的誤差。

表2 合閘油緩沖器不同故障程度下的振動信號幅值和時間偏差Tab.2 Amplitude and time deviations as a function of the oil volume reduction in the closing oil damper
文獻[23]采用樣本間的歐氏距離評估萬能式斷路器的三相不同期程度。例如,以A相不同期為例,首先計算A相觸頭開距不同故障程度下的振動信號樣本熵值(通過調節觸頭開距為2mm、3mm、4mm、5mm模擬不同期故障程度),如圖18所示,然后選取3mm的觸頭開距作為參照,計算其他開距與該參照開距之間的樣本間歐氏距離,通過歐氏距離的大 小判斷不同期故障程度,A相不同期故障程度判定方法見表3。可以看出,該方法能夠較好地量化斷路器不同期故障程度,具有一定的實用性。該方法,對故障程度變化較大時較為有效[23],但對微小變化靈敏度有待進一步提高。
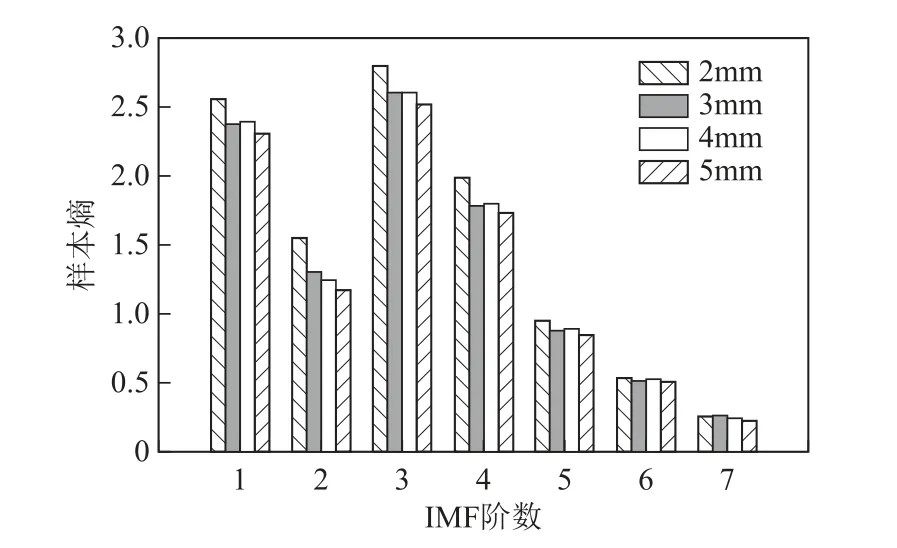
圖18 A相不同期故障程度的特征對比Fig.18 Feature contrast of A-phase non-synchronous fault degree
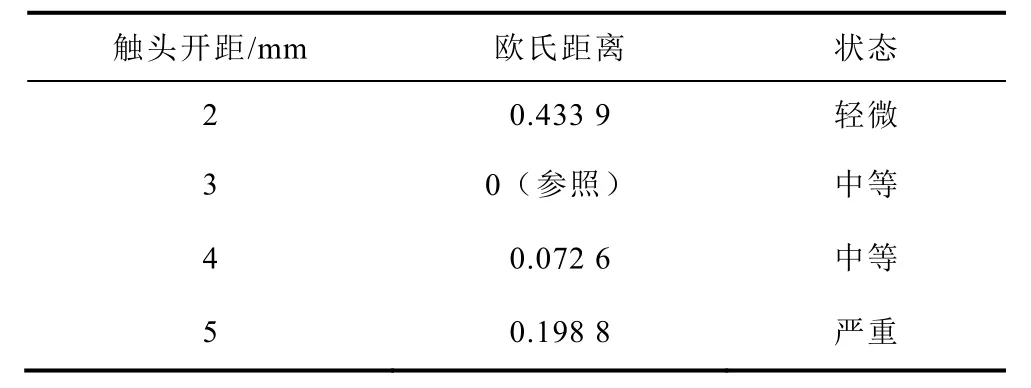
表3 A相不同期故障程度判定方法Tab.3 Determination method for A-phase nonsynchronous fault degree
文獻[16]則利用振動信號的多尺度排列熵偏均值(Partial Mean of Multi-Scale Permutation Entropy, PMMPE)對低壓萬能式斷路器分合閘故障程度進行評估。圖19所示為斷路器分合閘不同故障類型、不 同故障程度下的振動信號PMMPE擬合曲線[16],可以看出,隨著故障程度的增大,PMMPE值呈現出較好的單調遞減的趨勢,因此參照該曲線,可以較方便地對分合閘故障程度進行評估。然而,對于某些不同的故障,PMMPE的區分度不是很明顯,例如圖19中的A/B/C三相不同期故障,曲線之間較為接近,區分性有待進一步的提高。
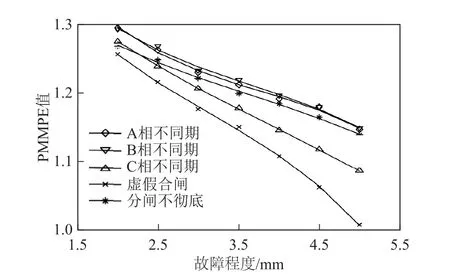
圖19 不同故障模式下的PMMPE與故障程度特性曲線Fig.19 Characteristic curves between PMMPE and fault degree in different working modes
除了上述利用振動信號對斷路器(機械零部件)故障程度進行診斷外,還有利用觸頭行程信號[14]、線圈電流信號[15]實現故障程度診斷。這些方法與本文方法的優缺點對比總結見表4。
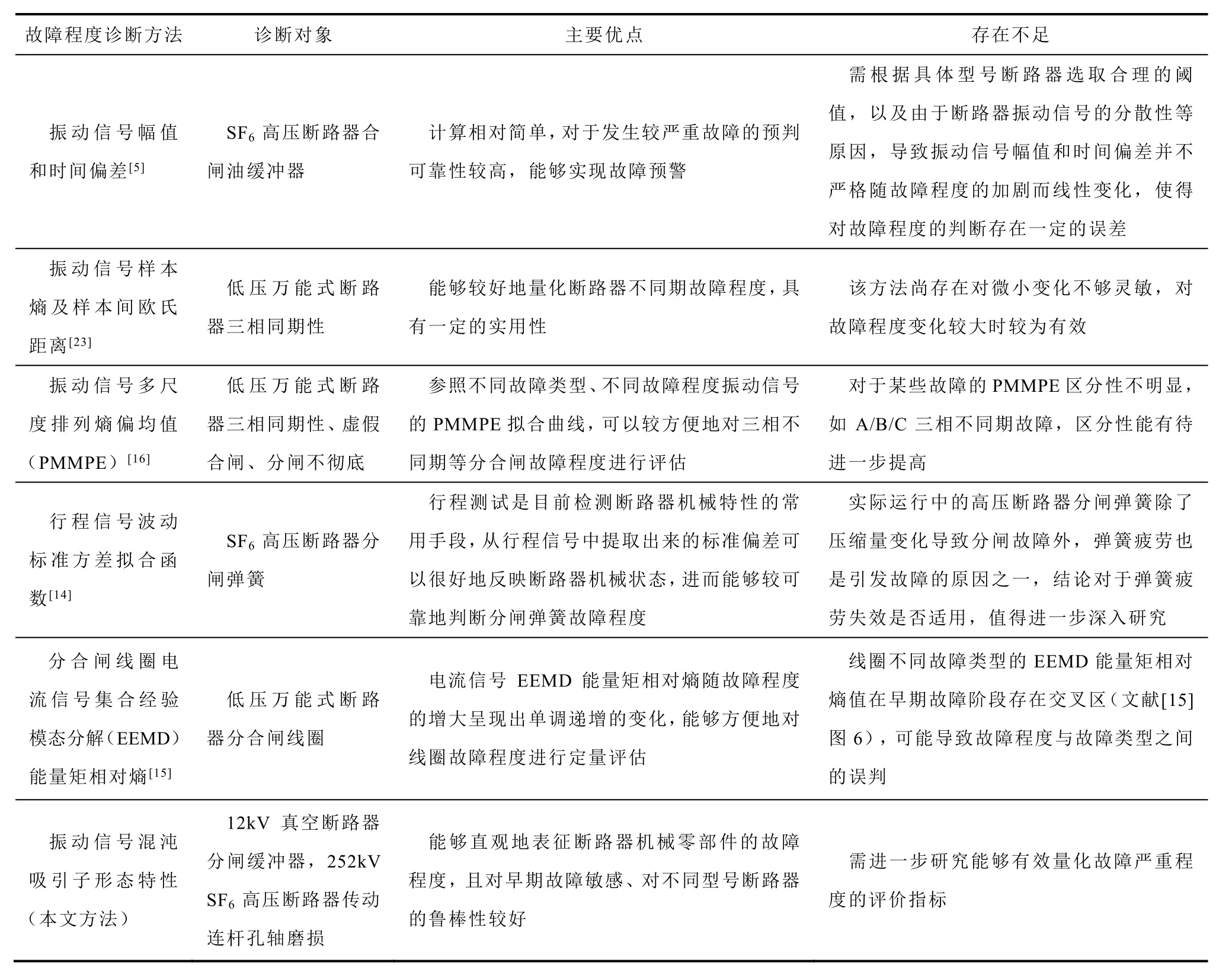
表4 斷路器故障程度診斷方法對比Tab.4 Comparison of diagnosis methods for CB fault severity
5 結論
1)對斷路器振動信號進行分時分割、特征模態提取以及重構混沌吸引子等處理后,可將斷路器零部件早期故障的微弱故障特征顯現出來。其中,①信號分時分割是以斷路器正常狀態時的振動信號為參考依據,結合斷路器動作特點,將振動信號分割為脫扣、解列、傳動及制動階段,該方法有利于故障零部件的有效定位;②提出的SSVMD可以對振動信號進行參數自適應分解,該算法能夠根據斷路器振動信號自身特點,自動選擇分解層數,避免目前VMD方法存在參數選擇困難等不足。
2)斷路器制動階段的振動信號混沌吸引子能夠有效反映分閘緩沖器的故障程度,可以以吸引子軌道突然開始逃離吸引域作為緩沖器開始出現故障的判據;而傳動階段的振動信號混沌吸引子能夠有效反映傳動連桿孔軸的磨損程度,軸銷脫落前一次的混沌吸引子明顯異于正常狀態的吸引子,因此,可以以該吸引子的形態作為軸銷脫落的預警判據。
3)通過對一臺12kV真空斷路器開展零部件故障程度模擬試驗,以及通過分析一臺252kV SF6高壓斷路器傳動連桿孔軸磨損的演化過程,驗證了所提方法的有效性和一定的普適性。所提方法能夠有效識別斷路器零部件的故障程度,特別是對于早期故障的微弱故障信息,能夠以比較直觀的方式呈現出來,有利于提高故障程度識別的準確性。
4)后續工作可根據斷路器零部件不同故障程度的混沌吸引子形態特征,提出合適的量化形態特征的指標,以實現故障程度的定量評估。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
數學物理學報(2017年6期)2018-01-22 02:26:40
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
汽車維修與保養(2015年6期)2015-04-17 03:31:50
