基于NSGA-Ⅱ算法的兩擋AMT換擋規(guī)律多目標(biāo)優(yōu)化
2021-07-19 01:34:00張東東宗子淳馮金芝
重慶交通大學(xué)學(xué)報(自然科學(xué)版) 2021年7期
張東東,宗子淳,馮金芝
(上海理工大學(xué) 機械工程學(xué)院, 上海 200093)
0 引 言
目前,固定速比減速器仍是純電動汽車電驅(qū)動系統(tǒng)的主要形式,該傳動形式不僅不能充分利用驅(qū)動電機的高效區(qū),而且要求驅(qū)動電機在恒扭矩區(qū)提供高瞬時轉(zhuǎn)矩,以滿足加速和爬坡等性能,在恒功率區(qū)提供高轉(zhuǎn)速,以滿足最高車速[1]。兩擋或多擋電動汽車通過合理有效的擋位切換,降低對驅(qū)動電機的要求,提高驅(qū)動系統(tǒng)的工作效率和能源利用率,體現(xiàn)出更好的動力性和經(jīng)濟性,因此兩擋或多擋電驅(qū)動系統(tǒng)是電動汽車未來的發(fā)展趨勢。黃偉等[2]通過對搭載固定速比減速器和兩級自動變速器的純電動汽車性能的研究,表明兩擋變速箱能夠降低對電機最大轉(zhuǎn)矩和最高轉(zhuǎn)速的要求,優(yōu)化電機的工作區(qū)間,提高驅(qū)動系統(tǒng)的效率,并且能夠降低機械傳動的噪音;陳燎等[3]以提高純電動客車的行駛里程為目標(biāo),分別對固定速比減速器與兩擋變速器的速比進行優(yōu)化設(shè)計,仿真結(jié)果表明:在同樣滿足動力要求的情況下,采用兩擋變速器的傳動方案行駛里程提高了21.3%。
電控機械式自動變速器(AMT)利用電機能夠連續(xù)調(diào)速和準(zhǔn)確的控制轉(zhuǎn)速、扭矩的特點,取消離合器,避開了離合器結(jié)合控制難,具有一定的優(yōu)勢。換擋規(guī)律是自動變速器在兩個擋位之間隨控制參數(shù)變化的切換機制,對電動汽車經(jīng)濟性和動力性有著決定性的影響。傳統(tǒng)的換擋規(guī)律一般都基于經(jīng)驗或特定約束條件,難以綜合考慮駕駛意圖與車輛行駛狀態(tài)[4];陳淑江等[5]分析了動力性和經(jīng)濟性換擋規(guī)律的差異,考慮駕駛員“中低負荷注重經(jīng)濟性,中高負荷注重動力性”的心態(tài),提出依據(jù)速度劃分動力性和經(jīng)濟性換擋區(qū)間,但難以兼顧整個加速過程的動力性和經(jīng)濟性;李偉[6]建立多性能綜合最優(yōu)換擋規(guī)律的目標(biāo)函數(shù),通過動力性、經(jīng)濟性分目標(biāo)函數(shù)設(shè)定不同權(quán)值來滿足駕駛員對汽車性能的需求,難以迎合所有駕駛員的風(fēng)格;ZHU B等[7]研究了純電動汽車兩擋變速器的換檔策略,基于電機效率MAP圖,分別以動力性和經(jīng)濟性為目標(biāo),提出了最優(yōu)升降擋點的計算方法,并通過臺架試驗驗證了該方法的有效性。顯然,整車動力性和經(jīng)濟性之間存在矛盾,一個性能的提升往往伴隨另一性能的下降,且受駕駛員風(fēng)格影響。為了同時兼顧整車動力性和經(jīng)濟性,筆者以兩擋AMT為研究對象,建立以百公里加速時間為動力性目標(biāo),單位里程能耗為經(jīng)濟性目標(biāo)的多目標(biāo)優(yōu)化模型,采用NSGA-Ⅱ多目標(biāo)優(yōu)化方法進行優(yōu)化,提出不受駕駛員風(fēng)格和意圖影響的整個加速過程的綜合最優(yōu)換擋規(guī)律。最后,基于MATLAB/Simulink平臺搭建換擋規(guī)律評價模型,通過與最佳動力性、最佳經(jīng)濟性換擋規(guī)律的仿真對比,驗證綜合最優(yōu)換擋規(guī)律的優(yōu)越性。
1 兩擋電驅(qū)動系統(tǒng)及換擋規(guī)律原理
1.1 電驅(qū)動系統(tǒng)結(jié)構(gòu)與參數(shù)
圖1為某款純電動汽車兩擋電驅(qū)動系統(tǒng)的結(jié)構(gòu)示意,包括驅(qū)動電機、兩擋AMT、差速器等。該系統(tǒng)的輸入軸是空心軸,輸出軸穿過空心軸為車輪傳遞動力,構(gòu)成輸入軸、輸出軸同軸的結(jié)構(gòu)形式。該電驅(qū)動系統(tǒng)搭載的整車平臺參數(shù)及性能要求如表1。
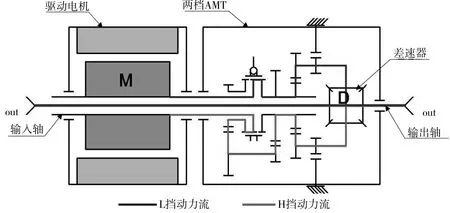
圖1 電驅(qū)動系統(tǒng)結(jié)構(gòu)

表1 整車參數(shù)及性能要求
1.2 換擋規(guī)律原理
換擋規(guī)律是自動變速器在兩個擋位之間隨控制參數(shù)變化的切換機制。目前,以動力性或經(jīng)濟性為目標(biāo)的換擋規(guī)律包括單參數(shù)、雙參數(shù)和三參數(shù)換擋規(guī)律。車速是單參數(shù)換擋規(guī)律常用的控制參數(shù),但適用工況和車型比較單一;雙參數(shù)換擋規(guī)律目前在市場上應(yīng)用的最廣泛,控制參數(shù)一般選用踏板開度和車速;三參數(shù)換擋規(guī)律為了更好地實現(xiàn)動態(tài)換擋,控制參數(shù)加入加速度。但是三參數(shù)的制定需要大量的試驗數(shù)據(jù),而且三參數(shù)換擋發(fā)展并未成熟,容易出現(xiàn)動力不足或頻繁換擋等情況[8]。筆者選用的是雙參數(shù)換擋。兩擋兩參數(shù)換擋原理圖如圖2。其中縱坐標(biāo)為加速踏板開度,橫坐標(biāo)為車速。
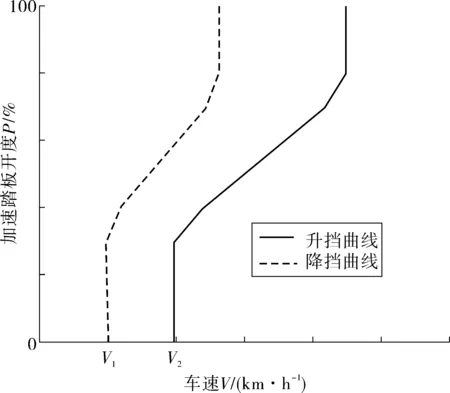
圖2 雙參數(shù)換擋原理
為了避免循環(huán)換擋,所以升降擋曲線為兩條曲線,對于降擋曲線,一般遵循以下準(zhǔn)則:一般降擋車速會比升擋車速低2~8 km/h,以免出現(xiàn)循環(huán)換擋的情況。但是高擋的降擋車速不能低于高擋的最小車速[9]。升擋曲線為低擋升為高擋,降擋曲線為高擋降為低擋,即當(dāng)車輛加速時,車輛狀態(tài)(V,a)從升擋曲線左側(cè)變到右側(cè),則車輛從低擋升為高擋;若車輛減速時,車輛狀態(tài)(V,a)從降擋曲線右側(cè)變到左側(cè),則車輛從高擋降為低擋。
2 單一目標(biāo)的換擋規(guī)律
單一目標(biāo)的換擋規(guī)律是指以最佳動力性或最佳經(jīng)濟性為目標(biāo)的換擋規(guī)律,它們的獲取方法不同。最佳動力換擋規(guī)律需充分利用驅(qū)動電機的牽引力,獲取最大的加速度;最佳經(jīng)濟性換擋規(guī)律以單位里程能耗最低為目標(biāo),期望續(xù)駛里程達到最大。
2.1 最佳動力性換擋規(guī)律曲線
當(dāng)加速踏板為同一開度時,高、低擋速比下加速度特性曲線的交點,且交點不為負,則為動力性升擋點車速;若加速特性曲線不相交,則取低擋最高車速作為升擋點車速。筆者采用解析法求取最佳動力性換擋規(guī)律。
當(dāng)車輛在n擋行駛時,汽車的動力學(xué)方程為:
(1)
式中:Ft為車輪的驅(qū)動力;Ff為滾動阻力;Fw為空氣阻力;δn為旋轉(zhuǎn)質(zhì)量換算系數(shù);m為整車質(zhì)量;dV/dt為車輛加速度。由式(1)可得汽車加速度的計算公式為:
(2)
該款電機標(biāo)定的不同踏板開度下驅(qū)動扭矩曲線如圖3。

圖3 不同踏板開度下驅(qū)動扭矩曲線
在不確定旋轉(zhuǎn)部件的轉(zhuǎn)動慣量時,旋轉(zhuǎn)質(zhì)量換算系數(shù)按照經(jīng)驗式(3)進行估算:
(3)
式中:δ1≈δ2,取值范圍為0.03~0.05,文中取δ1=δ2=0.04,由此可得:低擋時,δL=1.16,高擋時,δH=1.08。
車速V和驅(qū)動電機轉(zhuǎn)速N存在如式(4)關(guān)系:
(4)
式中:in為各擋速比。
根據(jù)同一加速踏板開度下相鄰兩擋加速度相等得到:
(5)
由式(5)可得不同踏板開度下兩個擋位下的加速度與速度關(guān)系曲線,如圖4。為了能夠清晰的分析,圖4只顯示踏板開度為20%、40%、60%、80%和100%的加速度曲線。以最佳動力性為目標(biāo)時,最佳換擋點定義為某一踏板開度下兩個擋位加速度相同的車速。
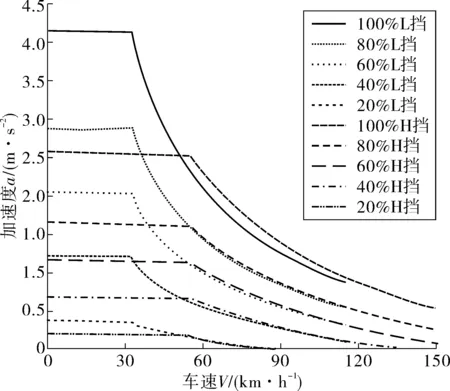
圖4 兩個擋位下的加速度與車速關(guān)系曲線
當(dāng)電機處于恒功率區(qū)時,由于低擋速比大,可以獲得更大的加速度,但是隨著速度的增大,整車受到的加速阻力和空氣阻力增大,所以當(dāng)車速到達臨界以后,高擋的加速度變大[10]。依據(jù)不同踏板開度下的加速度與車速關(guān)系曲線,將最佳換擋點連接,可獲得最佳動力性為目標(biāo)的升擋曲線。以此為基礎(chǔ),基于收斂型換擋原則可獲得降擋曲線。最終獲得最佳動力性換擋規(guī)律曲線如圖5。

圖5 以最佳動力性為目標(biāo)的換擋規(guī)律曲線
2.2 最佳經(jīng)濟性換擋規(guī)律曲線
提高經(jīng)濟性是電動汽車發(fā)展的重要方向之一。電動汽車的經(jīng)濟性以電能消耗為指標(biāo)。采用的評價指標(biāo)是NEDC(new european driving cycle)工況下的單位里程能耗。首先根據(jù)工況需求計算出輪邊需求扭矩:
(6)
式中:第1項為滾動阻力,m、g與f分別為整車質(zhì)量、重力加速度、滾動摩擦系數(shù);第2項為空氣阻力,CD、A與V分別為空氣阻力系數(shù)、迎風(fēng)面積以及車速;第3項為加速阻力,δ為旋轉(zhuǎn)質(zhì)量換算系數(shù)。
若已知當(dāng)前擋位下的速比,利用式(4)可獲得當(dāng)前車速對應(yīng)驅(qū)動電機的轉(zhuǎn)速,在圖6驅(qū)動電機效率map圖中插值求得當(dāng)前車速對應(yīng)的電機效率。
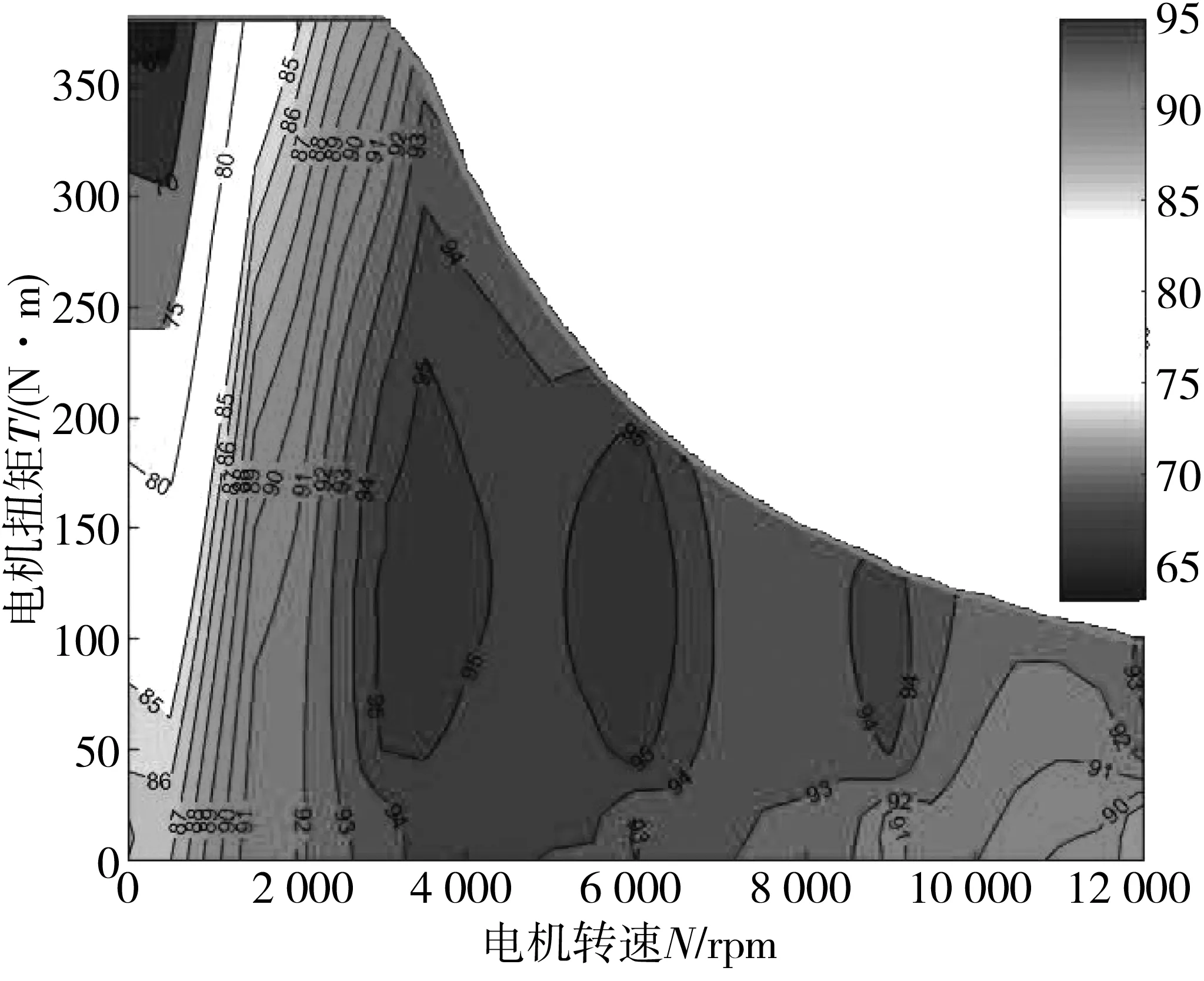
圖6 電機的效率map
電機的功率為:
(7)
式中:Pm為電機消耗功率;Tm為電機輸出扭矩;N為電機輸出轉(zhuǎn)速;ηm為電機效率。
對電池消耗功率進行積分,得到整個循環(huán)工況消耗的電能WNEDC,則單位里程能耗W為:
(8)
式中:S為循環(huán)工況的路程。
將不同踏板開度下,單位里程能耗最低的點連接,即為最佳經(jīng)濟性升擋曲線。最佳經(jīng)濟性降擋曲線的獲取與動力性降擋曲線相同,這里取2~8 km/h作為降擋速差。圖7即為最終獲得的最佳經(jīng)濟性換擋規(guī)律曲線。
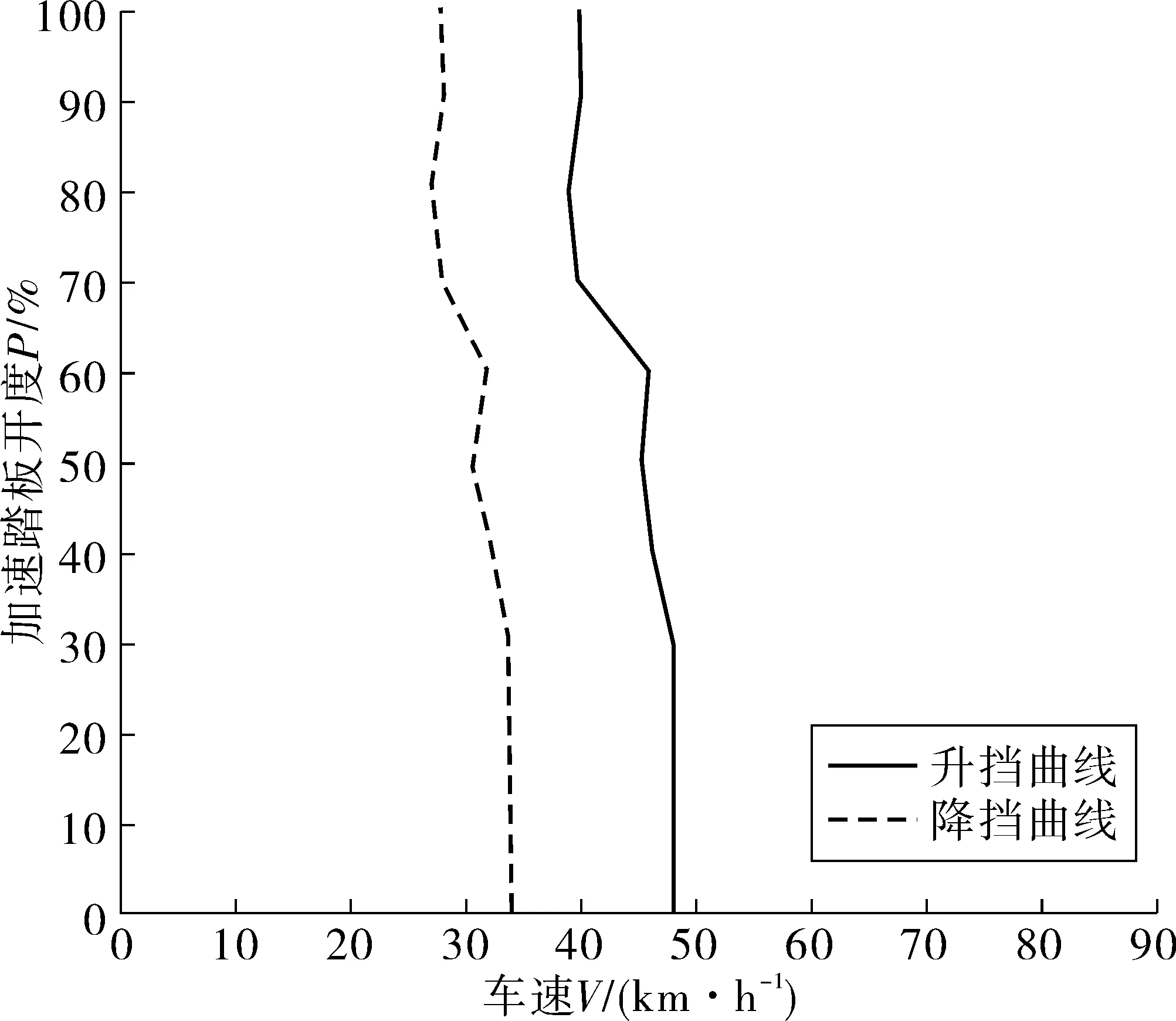
圖7 最佳經(jīng)濟性換擋規(guī)律曲線
值得注意的是,基于最佳動力性、經(jīng)濟性為目標(biāo)的換擋規(guī)律無法同時兼顧動力性和經(jīng)濟性。
3 換擋規(guī)律多目標(biāo)優(yōu)化模型及NSGA-Ⅱ算法
以最佳動力性和經(jīng)濟性為目標(biāo)制定的換擋規(guī)律通常會相互制約,其中一種性能的提高會犧牲另一種性能,因此客觀地評價多目標(biāo)問題最優(yōu)解,需要在給定條件下平衡兩種性能。為兼顧動力性和經(jīng)濟性,筆者采用NSGA-Ⅱ算法對動力性、經(jīng)濟性最佳換擋點進行優(yōu)選,形成一種綜合換擋規(guī)律以實現(xiàn)兩種性能的有效平衡。
3.1 換擋規(guī)律多目標(biāo)優(yōu)化模型
3.1.1 目標(biāo)函數(shù)
以整車動力性評價指標(biāo)百公里加速時間f1、經(jīng)濟性評價指標(biāo)單位里程能耗f2構(gòu)造目標(biāo)函數(shù),即:
minF(V)=(f1,f2)T
(9)
其中,

(10)
(11)
式中:vc為車輛的換擋車速;δ1、δ2為L、H擋對應(yīng)的轉(zhuǎn)動慣量;V為車速,t1為在L擋時的車輛運行時間;t2為車輛總加速時間。
3.1.2 優(yōu)化變量
由前述單一目標(biāo)的換擋規(guī)律分析可知,制定換擋規(guī)律本質(zhì)上確定最佳換擋點對應(yīng)的車速。因此,筆者也將某一踏板開度下的換擋車速vc定義為設(shè)計變量,有:
X=[vc]
(12)
從圖6可以得出,電機效率在90%以上是轉(zhuǎn)速1 200 rpm至最高車速之間,為了使換擋車速處于電機高效率區(qū),換擋點的車速應(yīng)在20~115 km/h之間。
為了控制和標(biāo)定方便,只保留整數(shù),即以1 km/h作為優(yōu)化精度。選取加速踏板開度為10%、20%、30%、40%、50%、60%、70%、80%、90%和100%的換擋車速作為優(yōu)化變量,因為踏板開度不同,電機的扭矩和轉(zhuǎn)速曲線不同,所以每次只對某一個踏板開度下的換擋車速做優(yōu)化,共優(yōu)化10次。
3.2 NSGA-Ⅱ 算法
非支配排序遺傳算法NSGA-Ⅱ(non-dominated sorting genetic algorithm-Ⅱ)提出了快速非支配排序算法,引進了精英策略,避免優(yōu)良個體在進化過程中丟失,以獲得更優(yōu)設(shè)計;采用擁擠度和擁擠度比較算子,使得進化過程中種群比較豐富,彌補了原始算法的不足,提高了算法的運算速度和魯棒性。多目標(biāo)優(yōu)化問題不存在唯一的全局最優(yōu)解,而是存在最優(yōu)解集合,稱為Pareto最優(yōu)解。NSGA-Ⅱ優(yōu)化算法流程圖如圖8,其中關(guān)鍵的步驟和概念解釋如下:

圖8 NSGA-Ⅱ基本流程
1)初始化種群。采用產(chǎn)生隨機數(shù)的方法初始化種群。文中換擋車速的取值范圍為0~100 km/h,一次性隨機產(chǎn)生N組不同的隨機數(shù)組作為第1代子群。
2)約束非支配排序。對所有個體進行排序,選排序前N個個體作為父代,解釋如下:
對于決策變量的兩個解X1、X2,若目標(biāo)函數(shù)f1、f2任意滿足以下關(guān)系之一,則認為X2支配X1,即X2優(yōu)于X1:
①f1(X1)>f2(X1),f1(X2)>f2(X2);
②f1(X1)>f2(X1),f1(X2)=f2(X2);
③f1(X1)=f2(X1),f1(X2)>f2(X2)。
若目標(biāo)函數(shù)f1、f2關(guān)系任意滿足以下關(guān)系之一,則認為X1和X2互不支配:
①f1(X1)>f2(X1),f1(X2)<=f2(X2);
②f1(X1)
當(dāng)排序值相同時,則選擇擁擠距離較大的個體作為父代。擁擠度值的大小表征了解集中個體與其它個體相似程度,反映了多目標(biāo)優(yōu)化解集中個體的多樣性以及對應(yīng)的目標(biāo)函數(shù)值在Pareto前沿的分布特征。
3)通過遺傳算子執(zhí)行遺傳操作。包括選擇、交叉和變異算子,為:
① 選擇算子采用輪盤賭選擇方式,即基于按比例的適應(yīng)度分配方法。
② 采用拉普拉斯交叉算子交叉過程為:

(13)
(14)
所以新的子代和父代具有相同的分布。
③冪變異算子。對個體中的每個變量執(zhí)行變異操作后,新個體的表達式為:
(15)

4)精英策略:將父代和子代合并構(gòu)成新的備選父代,以保留父代和子代中的精英個體。
5)終止條件。終止條件為優(yōu)化進程達到最大進化代數(shù)。
4 優(yōu)化結(jié)果及分析
4.1 優(yōu)化結(jié)果
基于NSGA-Ⅱ優(yōu)化算法對換擋規(guī)律曲線進行尋優(yōu)。設(shè)置NSGA-Ⅱ算法的參數(shù)為:種群規(guī)模N=100,交叉與變異概率分別為0.9和0.1,最大進化代數(shù)為50,拉普拉斯交叉算子中參數(shù)a取值為0,參數(shù)b取值為0.6,冪變異算子中參數(shù)p取值為4。經(jīng)過優(yōu)化,得到換擋規(guī)律的多目標(biāo)Pareto最優(yōu)解。以加速踏板開度為100%情況為例,兩個目標(biāo)函數(shù)之間的關(guān)系是一個目標(biāo)函數(shù)值的增加以另一個目標(biāo)函數(shù)值的降低為代價。因此需要合理選取Pareto非劣解中的個體作為最優(yōu)解。表2為最優(yōu)解集域。
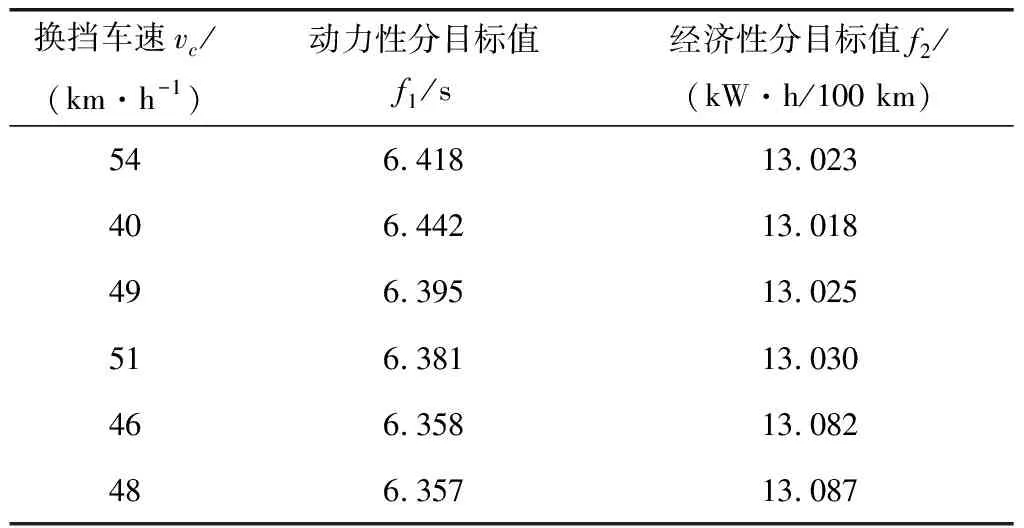
表2 設(shè)計變量的解集域
電機效率定義為輸出功率和輸入功率的比值,電機效率高即內(nèi)部損耗功率較少,能源利用率高,反之則內(nèi)部損耗大,浪費能源。因此將電機效率作為選取最優(yōu)解的依據(jù)。以加速踏板開度為100%為例,非劣解對應(yīng)的電機效率如表3。
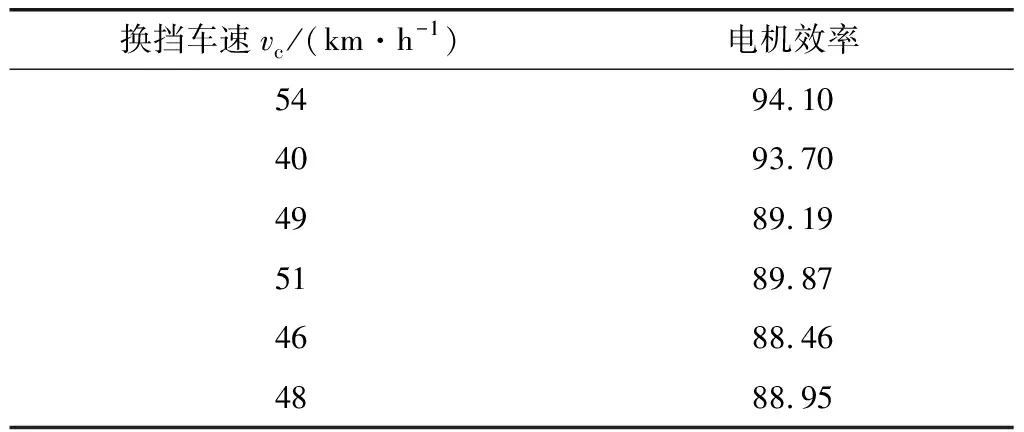
表3 換擋車速對應(yīng)的電機效率
因此,加速踏板開度為100%時,綜合性能換擋點為54 km/h。10次優(yōu)化后得到10個加速踏板開度下最優(yōu)的換擋點,如表4。綜合性能最優(yōu)的換擋規(guī)律曲線則如圖9。
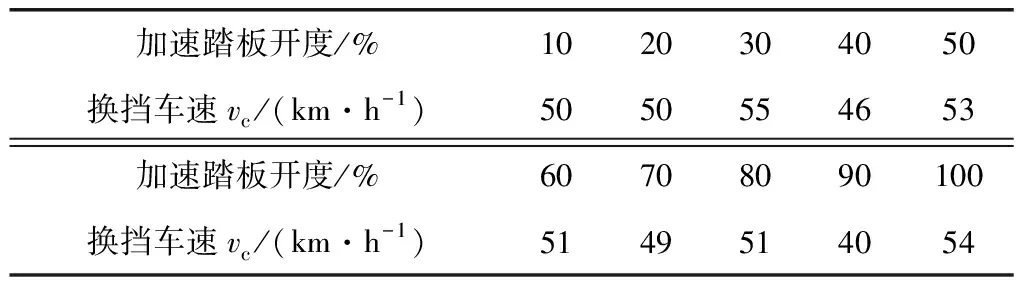
表4 不同踏板開度下綜合性能最優(yōu)升擋點
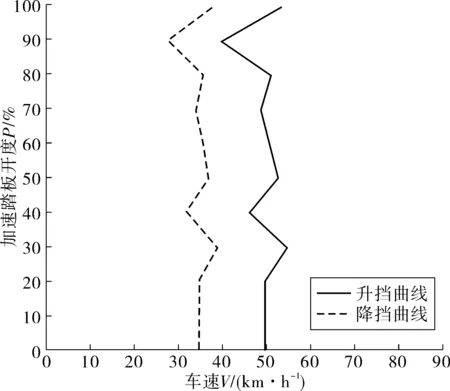
圖9 綜合性能最優(yōu)換擋曲線
4.2 換擋規(guī)律仿真結(jié)果對比分析
為了對比分析基于綜合性能換擋規(guī)律與基于單一目標(biāo)的換擋規(guī)律對整車動力性和經(jīng)濟性的影響,以某純電動汽車為平臺,根據(jù)NEDC工況,在MATLAB/Simulink建立換擋規(guī)律仿真評價系統(tǒng)。
換擋規(guī)律仿真評價系統(tǒng)框圖如圖10,主要包括NEDC工況模塊、電機性能模塊、兩擋AMT模塊、整車縱向動力學(xué)模塊以及換擋邏輯模塊。
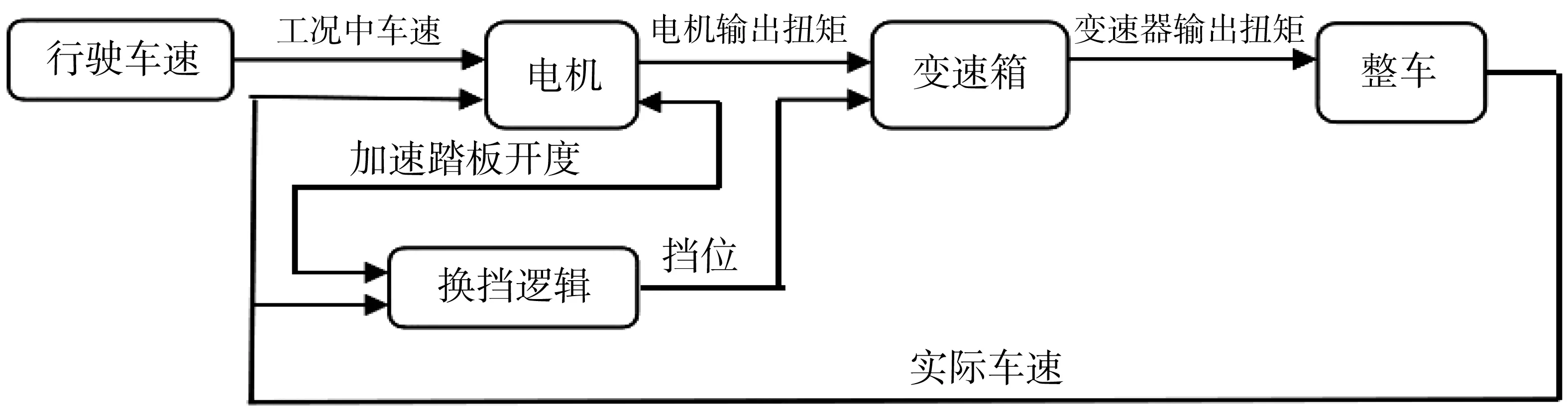
圖10 換擋規(guī)律仿真評價系統(tǒng)框
4.2.1 動力性能對比
關(guān)于電動汽車動力性能仿真,采用百公里加速時間作為動力性評價指標(biāo),加速踏板開度設(shè)置為100%,3種換擋規(guī)律仿真過程中車速隨時間變化圖如圖11。
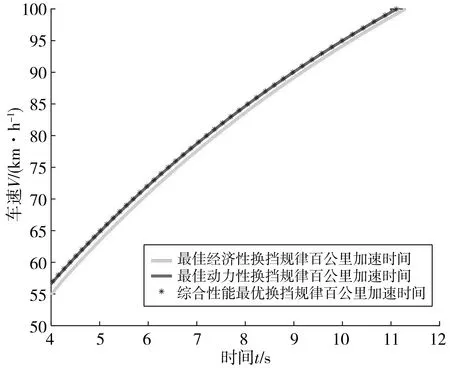
圖11 不同換擋規(guī)律下的百公里加速時間
仿真結(jié)果表明:對于加速踏板開度100%情況下電動汽車百公里加速時間,最佳動力性換擋規(guī)律為11.11 s;最佳經(jīng)濟性換擋規(guī)律11.30 s;綜合性能最優(yōu)換擋規(guī)律為11.12 s。從仿真結(jié)果可以看出,就加速性能而言,基于動力性最優(yōu)的換擋規(guī)律可獲得最佳的動力性,其次是綜合性能換擋規(guī)律,經(jīng)濟性換擋規(guī)律最差。
4.2.2 經(jīng)濟性能對比
采用在NEDC工況下純電動汽車單位里程能耗作為經(jīng)濟性評價指標(biāo),NEDC工況如圖12。在NEDC工況下,基于換擋規(guī)律仿真評價系統(tǒng)可以獲得3種換擋規(guī)律下的單位里程能耗。最佳經(jīng)濟性換擋規(guī)律、最佳動力性換擋規(guī)律以及綜合性能換擋規(guī)律的能耗分別為6.70、7.05、7.25 kW·h。圖13給出了3種換擋規(guī)律擋位變化情況,可以看出,不同換擋規(guī)律需求的換擋次數(shù)和時機差異性較大。最佳經(jīng)濟性換擋規(guī)律的需求換擋次數(shù)最多,使用最佳動力性換擋規(guī)律的換擋次數(shù)最少,也就是說兼顧經(jīng)濟性越高,換擋次數(shù)越多。
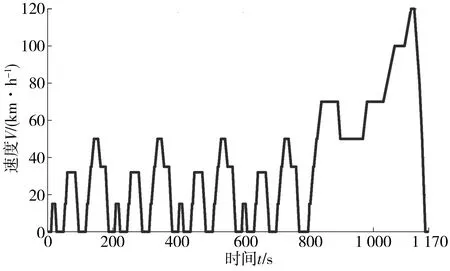
圖12 NEDC工況
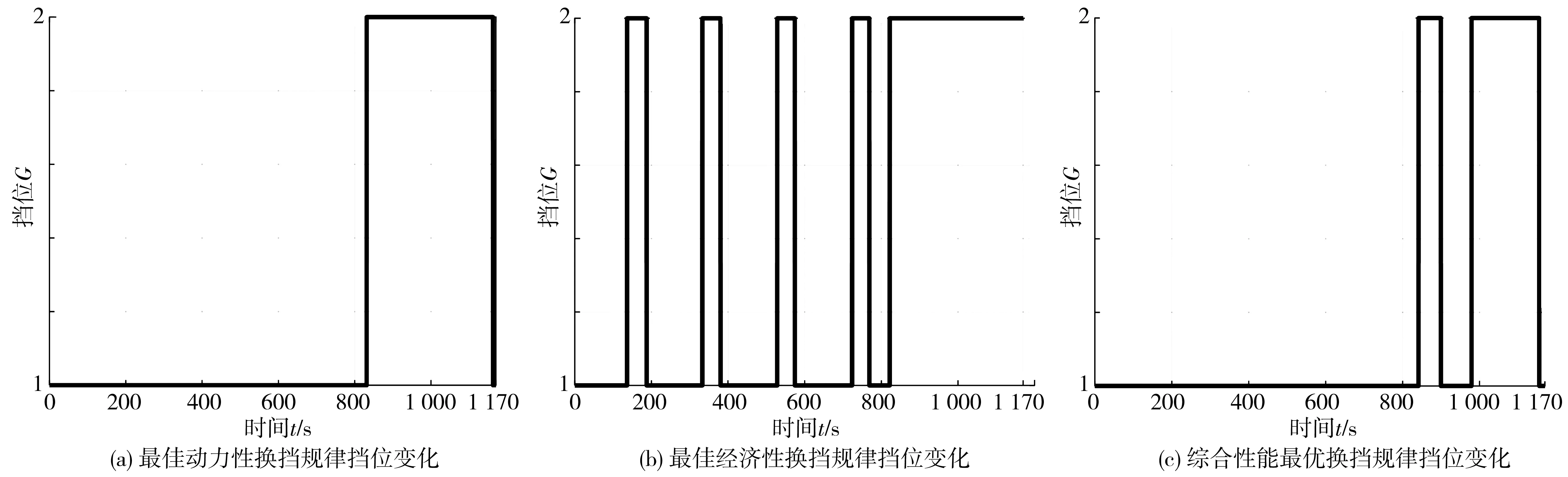
圖13 擋位變化
從仿真結(jié)果中可以看出最佳動力性換擋規(guī)律的動力性最好,但是經(jīng)濟性相對較差;最佳經(jīng)濟性換擋規(guī)律的經(jīng)濟性最好,動力性較差;綜合性能最優(yōu)換擋規(guī)律曲線兼顧動力性和經(jīng)濟性。
5 結(jié) 語
針對純電動汽車兩擋AMT換擋規(guī)律優(yōu)化問題,首先制定了最佳動力性換擋規(guī)律曲線和最佳經(jīng)濟性換擋規(guī)律曲線。然后,構(gòu)建了以最小化百公里加速時間與單位里程能耗為目標(biāo)的多目標(biāo)優(yōu)化問題,基于NSGA-Ⅱ算法制定了能同時兼顧動力性和經(jīng)濟性的綜合性能最優(yōu)換擋規(guī)律曲線。最后,在MATLAB/Simulink中搭建換擋規(guī)律仿真評價模型,驗證了最佳動力性換擋規(guī)律曲線、最佳經(jīng)濟性換擋規(guī)律曲線和綜合性能最優(yōu)換擋規(guī)律曲線的動力性和經(jīng)濟性。
猜你喜歡
車主之友(2022年6期)2023-01-30 07:58:16
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
房地產(chǎn)導(dǎo)刊(2022年4期)2022-04-19 09:04:10
汽車工程師(2021年12期)2022-01-17 02:29:58
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車實用技術(shù)(2019年17期)2019-09-21 03:46:32
黃河之聲(2017年13期)2017-01-28 13:30:17