移動式X波段雙偏振雷達資料處理
2021-07-19 01:52:22唐辟如
中低緯山地氣象 2021年3期
李 瑋,唐辟如,李 皓
(貴州省人工影響天氣辦公室,貴州 貴陽 550081)
0 引言
移動式X波段雙偏振雷達(以下簡稱雷達)可以發射和接收水平及垂直兩個方向的偏振波,除了可以得到回波強度、徑向速度和速度譜寬外,還可以獲得其特有的差分反射率因子、自相關系數和差分傳播相移等與水成物粒子類型、形狀及分布密切相關的獨立參量[1]。國內在20世紀70年代,已開始利用雙偏振雷達開展降水相態識別的分析研究[2-4],逐步形成了應用較廣的模糊邏輯算法[5],王致君等[6]提出了雙偏振雷達在人工影響天氣作業指揮及效果檢驗方面的應用前景。在冰雹外場觀測中,能夠提前布設在冰雹路徑之上,精準跟蹤目標云系,探測云中各種相態粒子的分布,并做冰雹識別[7]。楊哲等[8]對比了雙偏振雷達和C波段天氣雷達回波強度的差異,認為兩者對距離較近的觀測目標回波強度值一致性較好。曹水等[9]采用貴陽C波段雷達和移動X波段雷達數據,通過分析兩部雷達回波強度的空間分布、時間變化波動等特征參量,以驗證在復雜山地環境下,移動X波段天氣雷達對冰雹云天氣過程的探測效果。由于雷達觀測位置的變化、雷達信號本身的漲落以及降水系統的演變和移動等原因會造成雷達測量的參數產生較大的脈動,為消除這種脈動的影響,需事先對雷達探測到的資料進行快速處理(差分反射率因子系統誤差標定和原始資料平滑濾波處理),以便及時進行冰雹云監測和識別,進而科學指揮開展人工防雹作業。
1 雙偏振雷達差分反射率因子(ZDR)系統誤差的標定
差分反射率因子(ZDR)的大小取決于云中粒子的介點常數和形狀,是水平和垂直兩個方向回波的反射率因子之比的對數值,其精確與否,直接影響相態和冰雹的識別結果。因此,需對差分反射率進行標定處理,找出偏振雷達水平通道和垂直通道的系統誤差。目前主要的標定方法有3種:太陽法、信號源法和小雨法[10],太陽法是一種傳統的標定方法,其原理是當雷達天線對準太陽時,太陽輻射產生的水平和垂直極化功率相等,即ZDR為0 dB,ZDR的測量值即為系統誤差,該方法只能標定雷達接收通道的ZDR系統誤差,而沒有考慮雷達發射通道的ZDR系統誤差,另外太陽的噪聲功率太小,不利于獲得兩個方向通道的隔離度等信息。信號源法原理與太陽法相似,將雷達天線對準外置水平偏振波信號源,垂直通道接收到的交叉偏振波與共偏振波強度之差就是ZDR系統誤差。由于貴州移動式X波段雙偏振雷達天線掃描模式是VCP21模式,雷達天線不能采用垂直掃描的方式確定雷達ZDR系統誤差,為此采用小雨方法開展偏振雷達系統誤差ZDR的標定。具體方法為:采用仰角0.5°PPI和仰角1.5°PPI探測的小雨數據,通常認為小于25 dBz的降水回波視為小雨回波,因此利用小于25 dBz的小雨氣象回波,測定ZDR系統誤差。由于差分反射率(ZDR)值隨仰角的抬升而減小,并趨近于零,見式(1)。
(1)
由于目前移動式X波段偏振雷達天線掃描模式是VCP21模式,天線0°、0.5°、1.5°掃描時,若ZDR(0°)=1 dB,根據(1)式ZDR(0.5°)=1.000 08 dB,ZDR(1.5°)=1.000 73 dB,因此可以認為0.5°和1.5°的仰角對ZDR系統誤差的測定幾乎沒有影響。
為了測定ZDR系統誤差,對2016年8月15日20時16分雷達觀測的層狀云數據進行分析。雷達回波見圖1:
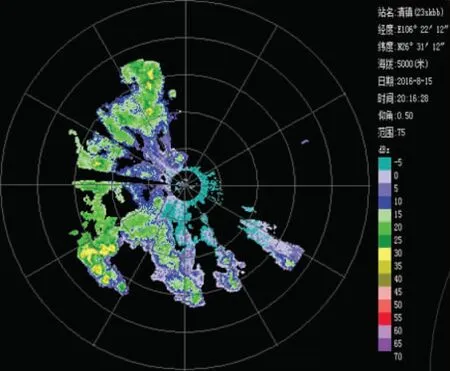
圖1 2016年8月15日20時16分雷達回波強度
為了降低大于25 dBz的回波對ZDR系統誤差的標定,對上述回波進行如下處理,選取方位215°~270°,距離在15~30 km回波進行統計分析,分析結果如圖2。
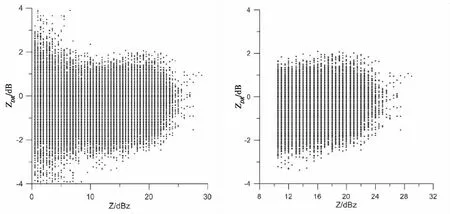
圖2 小于25 dBz時Z-ZDR分布
從圖2中可以看出,回波強度Z在0~10 dBz時,差分反射率因子均值Avg(ZDR)=-0.410 9,方差Var(ZDR)=0.871 9;回波強度Z>10 dBz時,差分反射率因子均值Avg(ZDR)=-0.421 5,Var(ZDR)=0.768 0,結果表明,差分反射率因子均值都為負值,與理論結果接近零值相悖。為了降低非氣象回波對標定的影響,在剔除非氣象回波的情況下,對數據進行重新統計,統計結果見圖3a,得出的ZDR均值后,對ZDR進行平移處理見圖3b,圖3b中,均值Avg(ZDR)=-0.059,方差Var(ZDR)=0.5,滿足理論ZDR的波動范圍。
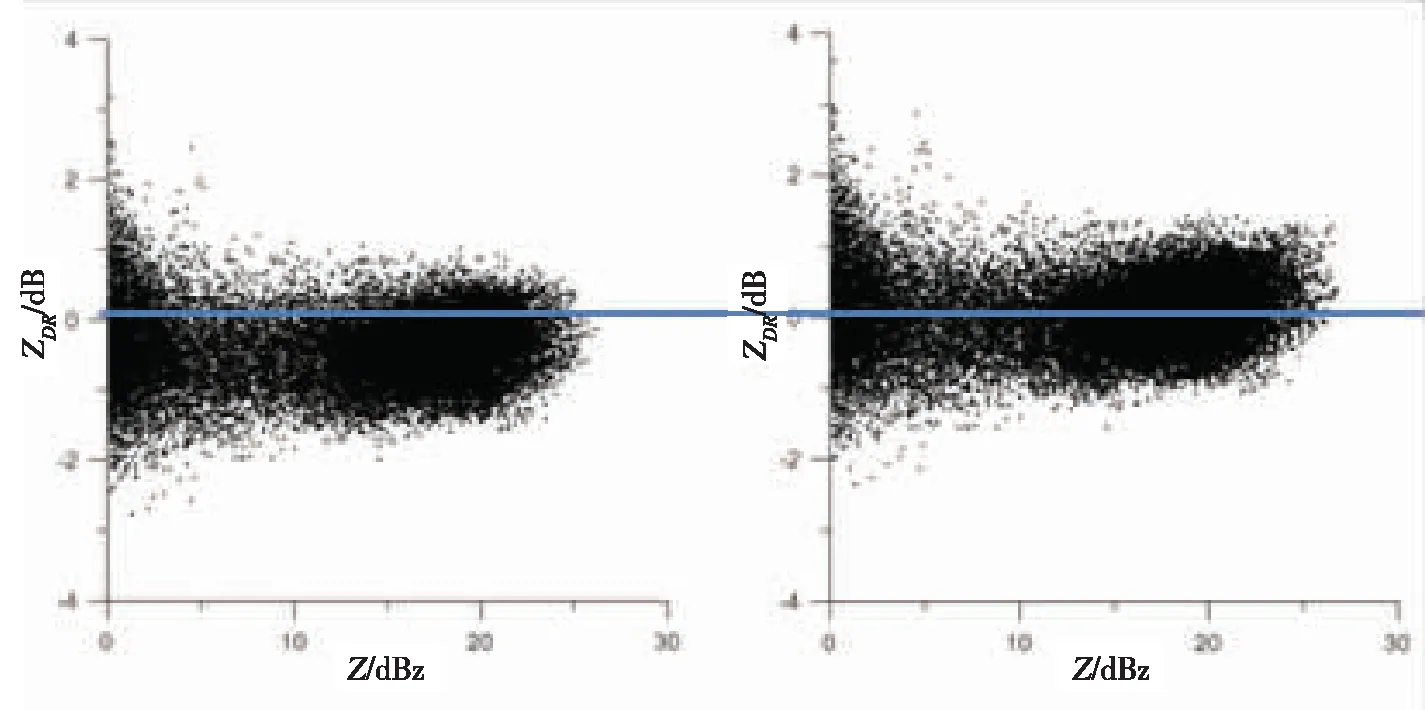
圖3 剔除非氣象回波的情況下Z-ZDR分布
在實際探測過程中實時監測ZDR系統誤差,需要對ZDR實時探測數據進行標定,供后續冰雹識別用,標定方法如下:在0.5°和1.5°仰角,將ZDR值從-8~8 dB按0.2 dB間隔分級,統計各級ZDR個數,ZDR個數百分比大于5的計入ZDR平均值計算,排除ZDR奇異值對ZDR系統誤差的影響。
2 雙偏振雷達資料平滑方法的分析
對雷達探測到的原始資料需要進行平滑濾波處理,這是目前在進行雷達資料質量控制中的重要一步,對于雙偏振雷達來說,這種處理就顯得更為重要,如何選擇合適的窗口和尺度,對資料的后續應用有著重要的意義。在雷達資料的預處理中,對雷達資料沿徑向的平滑是一個最基本也是最重要的步驟,合適距離上的平滑對于有效消除雷達資料的脈動、消除回波信號的漲落都有很好的作用。但是如果徑向平滑的距離太短,就不能達到很好的效果,平滑的距離太長,又會損失實際回波的信號,給后面的分析帶來誤差。因此如何選擇合適的徑向平滑距離是一個需要討論的問題[11]。
為了研究問題的方便,選取層狀云RHI中1.44°仰角徑向回波分析處理,見圖4a和圖4b,從回波強度(ZH),差分反射率因子(ZDR)、自相關系數(ρhv)和差分傳播相移(φDP)分布圖(圖略)中可以看出,4個參量都有毛刺存在,因此需要對數據采取相應的毛刺處理,處理方式為直接將奇異值剔除。經過消除奇異數據后4個參量的分布見圖5,從圖中可以看出,奇異數據剔除后,各個數據分布連貫性較好,符合預期。
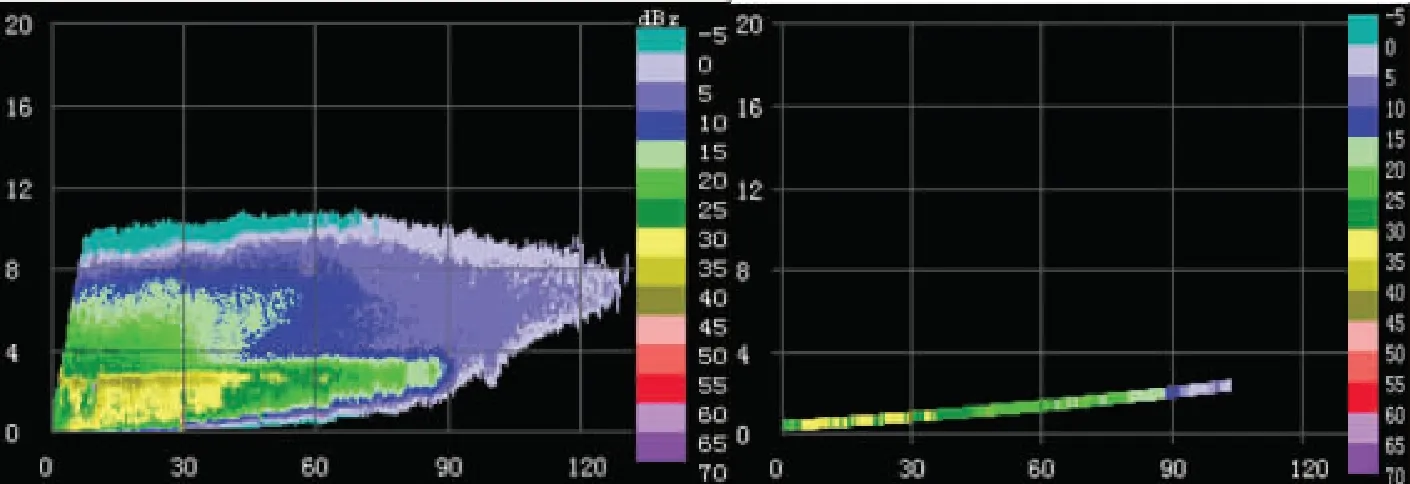
圖4 層狀云降水回波(a),1.44°仰角回波(b)
ZH-ZDR變化廓線 ZH-ρhv變化廓線 ZH-φDP變化廓線
將所有參量疊加在一張圖上(見圖6),當信噪比SNR<10 dB時,相關系數開始逐漸減小,且脈動范圍明顯增大,ZDR和ρhv在SNR<10 dB時也同樣具有脈動范圍增大的特征。根據上述特征,可以初步認為當信噪比SNR≥10 dB時,雷達測量的各偏振參量值可信。
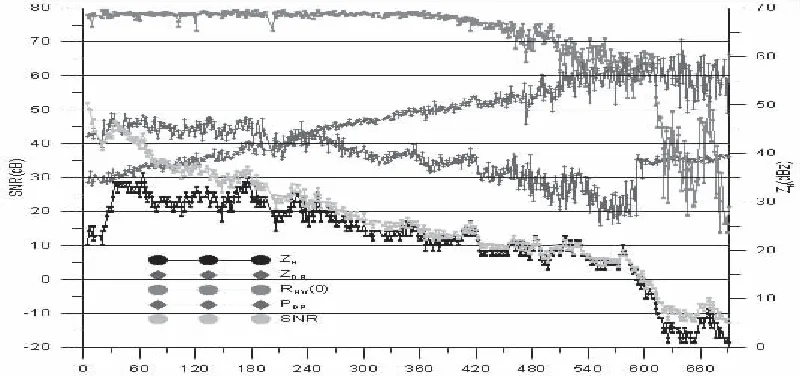
圖6 消除奇異數據后層狀云降水1.44°仰角參數隨徑向變化疊加
從圖6中可知,各個參量值還是有一定的脈動性,為了降低脈動性,對 RHI層狀云降水1.44°仰角各參數分別進行3、5、7、9、11點平滑處理,平滑處理后的結果見圖7,從圖中可以看出,平滑點數越多,參量的脈動性減小,但是這個并不是意味著平滑點數越多越好,如差分反射率,其值本來就偏小,平滑過多,將丟失真實的差分反射率信息。
圖7能較好地反映出整體趨勢,卻無法直接顯示具體平滑效果,為了對平滑結果進行更直觀的對比,通過調整縱坐標值,分別對ZH、ZDR、φDP和ρhv重畫,見圖8。
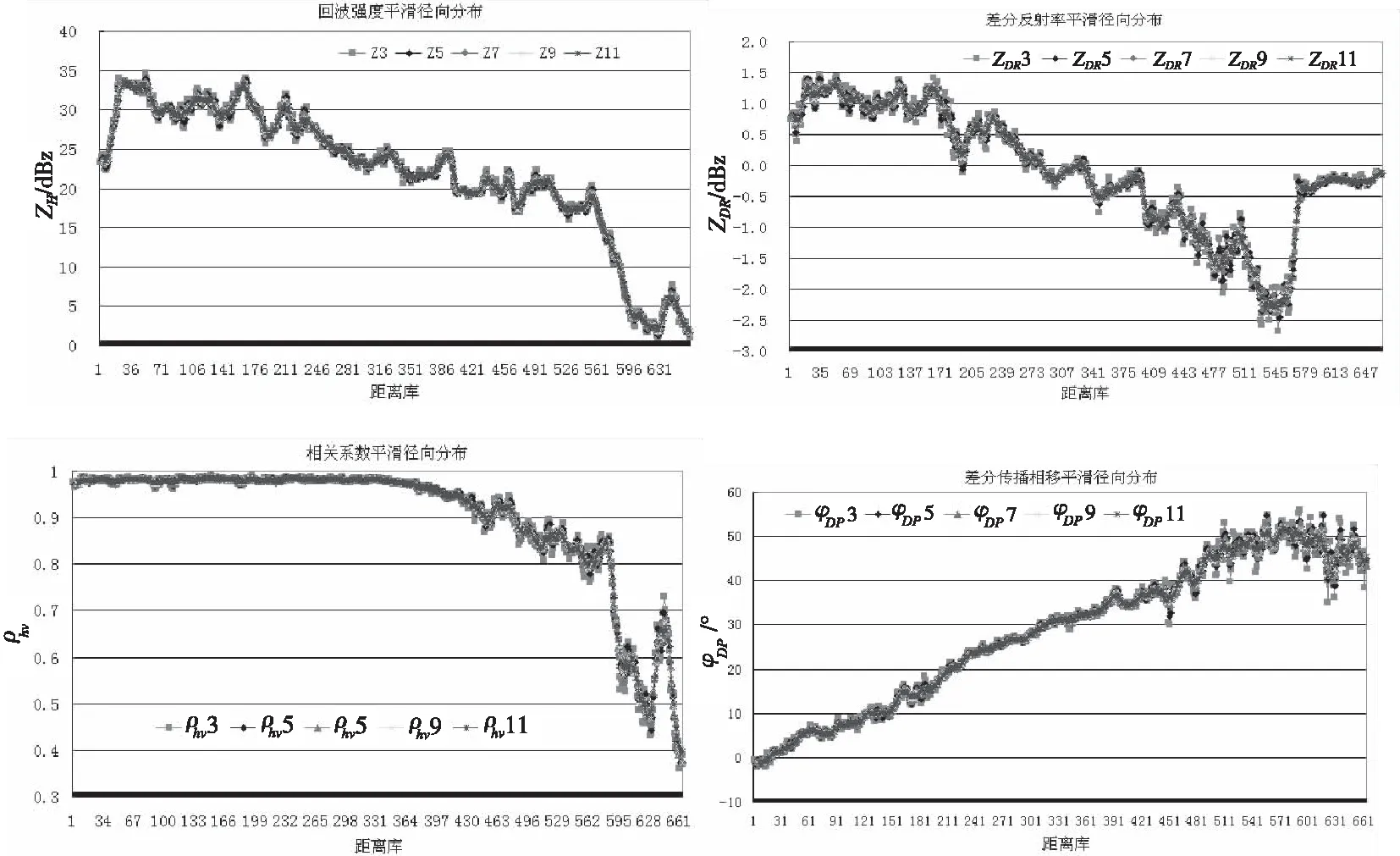
圖7 ZH、ZDR、φDP 和ρhv在徑向上分別經過3點、5點、7點、9點、11點平滑后得到的分布廓線
從圖8可知,隨著平滑點數的增加,資料的脈動性減弱,經過平滑后得到的廓線就基本上能消除掉單庫之間的資料脈動,同時還能顯示出與原始資料相似的廓線分布趨勢。隨著平滑點數的增加,雖然有效地消除庫間的資料脈動現象,但是此時的廓線過于平直,無法反應原始數據廓線上的一些大梯度區,表明隨著平滑點數的增加會損失實際回波的信號,不能有效地反映實際的回波變化特點。從圖8中可以看出,3點平滑,各參量脈動性仍不能有效消除,7點平滑基本上可以反映出原始資料的特性,11點平滑后,各參量都過于平直,尤其是相關系數,因此,本雷達中采用7點平滑。
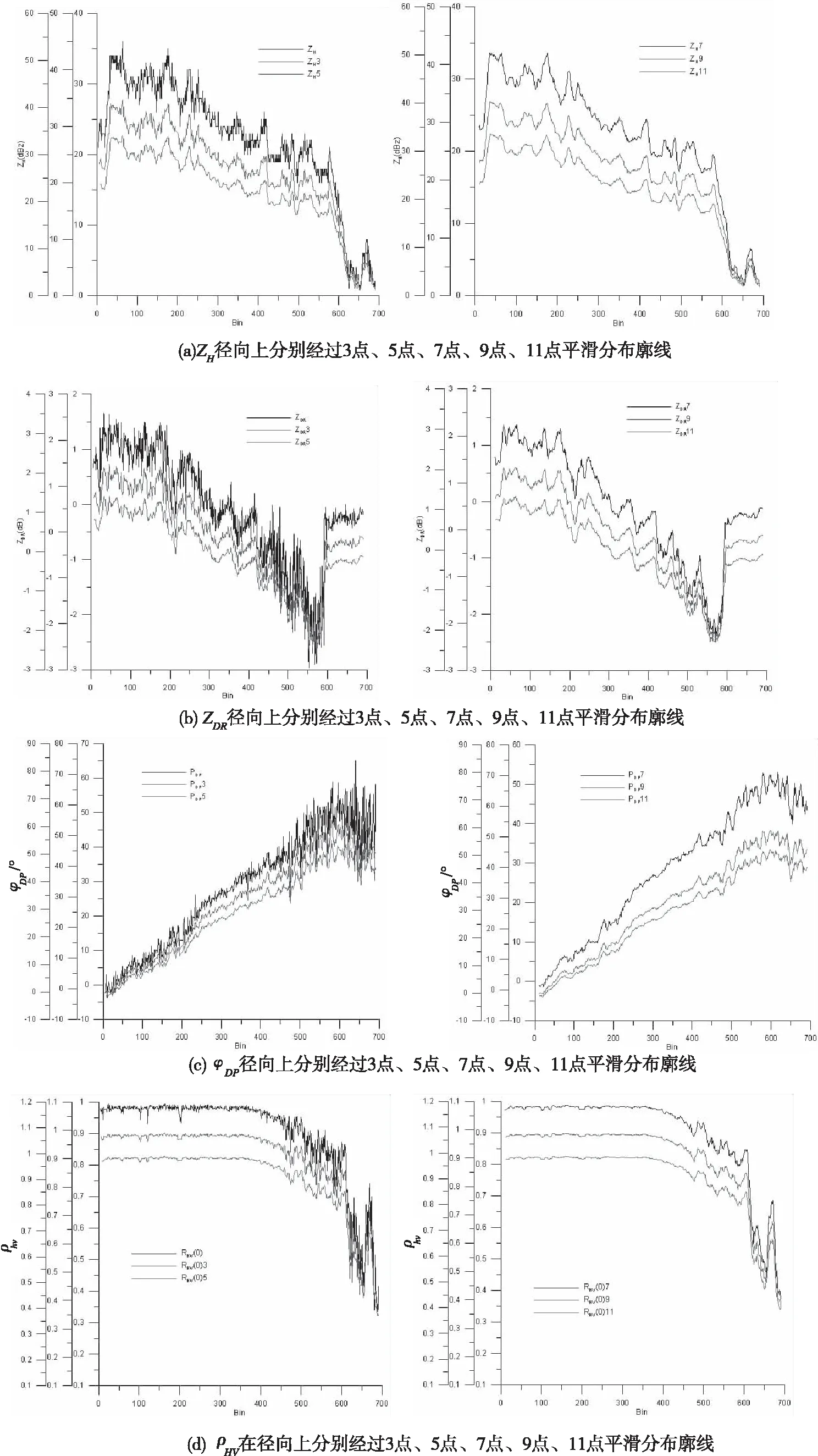
圖8 ZH、ZDR、φDP 和ρHV平滑后分布廓線
3 結論與討論
①對于天線掃描模式是VCP21模式的移動式X波段雙偏振雷達,使用小雨法來標定差分反射率因子(ZDR)系統誤差是有效的。
②在實際冰雹探測過程中需實時監測ZDR系統誤差,并對ZDR實時探測數據進行標定,以排除ZDR奇異值對ZDR系統誤差的影響。
③將各參量奇異值剔除后,當信噪比SNR≥10 dB時,雷達測量的各偏振參量值可信。
④平滑處理既要考慮減小參量的脈動性,也要避免丟失真實信息,尤其對于數值本來就偏小的差分反射率,故本雷達中采用7點平滑。