一種新型髖離斷外動力假肢的設計方法*
2021-07-23 08:44:30羅勝利喻洪流孟巧玲倪偉李新偉
生物醫學工程研究 2021年2期
羅勝利,喻洪流,△,孟巧玲,倪偉,李新偉
(1.上海理工大學康復工程與技術研究所,上海 200093;2.上海康復器械工程技術研究中心,上海 200093;3.民政部神經功能信息與康復工程重點實驗室,上海 200093)
1 引 言
髖關節部位截肢常因惡性腫瘤、無法治療性貧血以及爆發性感染疾病造成,占全部截肢人數的2.2%,死亡率超過50%[1-2]。此外,交通事故、中風以及低概率發生的戰爭等情況也可能會導致髖關節部位截肢[3]。
研究發現,佩戴髖離斷假肢的患者在平衡力及體力足夠時,仍需消耗正常人行走所需能量的兩倍[4-5]。此外,大部分髖部截肢(見圖1)患者在使用髖離斷假肢過程中無法控制其站立相和擺動相的穩定,嚴重影響患者的生活質量。因此,大多數患者常使用輪椅、拐杖等助行器以代替髖離斷假肢[6-8],而該方式存在壓瘡風險,也極易對患者心理造成傷害。

圖1 失去髖關節部分功能的情況Fig.1 Loss of partial function of the hip joint
研究發現,使用髖離斷假肢患者的平均步行速度在0.83~1.31 m/s,步長在0.65~0.96 m,均明顯小于正常值[9],而髖離斷假肢的旋轉中心與健側旋轉中心不重合是造成該問題的主要因素。
奧托博克公司研發的髖離斷假肢系列產品按轉動方式分為單軸轉動和多中心軸轉動兩種。見圖2,以7E7為代表的單軸轉動型假肢,其旋轉中心位于支撐板底部,使用過程中需要使用者通過提胯甩腿的方式將假肢甩出。在步態周期中,該方式會引起髖關節角度變化,在承重反應期與邁步相中期發生突變,造成步態不對稱。 以Helix為代表的多中心軸轉動型假肢,其旋轉中心位于支撐板傾面,工作方式同樣依賴慣性,其角度變化峰值特征仍然與正常人吻合度不高[8,10]。

圖2 傳統單軸及多軸髖離斷假肢結構
本研究通過設計一種雙平行四邊形機構,將髖離斷假肢的旋轉中心定位在殘肢髖臼,并依靠電機提供屈髖過程中的動力補償,提高假肢與健肢旋轉中心的重合度,從而緩解傳統髖離斷假肢使用者的步態不對稱問題。
2 髖關節假肢步態對稱性及穩定性分析
完整步態中,正常人的步態平衡主要基于腿部結構的抗外力干擾機制,支撐期重心集中在單條腿。此外,正常人的步態具有近似對稱性[11-12],而目前髖離斷假肢普遍存在步態不對稱的問題,限制了髖離斷假肢的應用。傳統髖離斷假肢中多中心軸旋轉結構通常固定在支撐板傾面,單軸旋轉結構通常設置在支撐板底部,見圖3。多中心軸旋轉結構近似模擬了人體髖關節股骨與髖骨之間球窩副連接方式,彌補了髖關節在行走過程中旋轉及左右擺動自由度,將髖關節運動保持在一條直線上。因此,使用者的體驗感優于單軸旋轉的髖離斷假肢,但假肢的使用方式依然是通過提胯動作用力將假肢甩出。
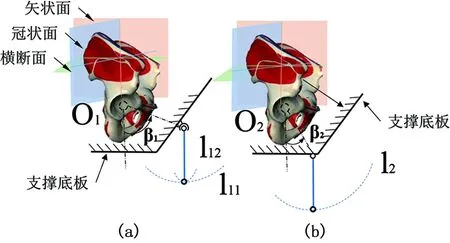
圖3 傳統髖離斷假肢的工作方式 (a).多中心軸轉動;(b).單軸轉動Fig.3 The working method of traditional hip broken prosthesis (a).multi-axis rotation;(b).single-axis rotation
2.1 矢狀面內步態對稱性分析
一般情況,正常人的步態具有近似對稱性,即a≈a1,見圖4。圖中未標記陰影部分桿件表示正常人腿,標有陰影桿件為傳統單軸假肢,確保在站立位置患者健側與假肢均接觸地面,邁步方向見圖4。對于佩戴傳統髖離斷假肢的患者來說,可以得到:

圖4 步態不對稱模型Fig.4 Asymmetric gait model
(1)
b1=l1sinα1+l2sinα2+l3sinα3+l4sinα4-Δx
(2)
Δx=Δlsinβ
(3)
使用傳統髖離斷假肢的患者在行走過程中步幅之間的尺寸差異可以表示為:
Δb=b-b1
(4)
式中,l2與l4均表示小腿長度,即l2=l4。根據步態具有近似對稱性,可以得到α2≈θ4,α4≈θ2。由式(1)、式(2)、式(3)可以推出,隨著β的增大,跨步長b增大,相反的跨步長b1減小,最終導致患者在行走過程中步幅之間的尺寸差異Δb增大,從而影響髖離斷假肢使用者的步態對稱。
2.2 站立期穩定性分析
通過動態分析可知,β大小是影響步態不對稱的關鍵,以單軸旋轉的髖離斷假肢為例,如果無限制地減小β,使β=0,見圖5。圖5(a)為普通單軸旋轉髖離斷假肢中點支撐期結構示意,圖5(b)為理想狀態下β=0時,普通單軸旋轉髖離斷假肢中點支撐期結構示意。

圖5 不同狀態下的穩定性分析 (a).β≠0 ;(b).β=0Fig.5 Stability analysis under different conditions
髖離斷假肢一般通過支撐底板與殘端接受腔連接,人體部分重力通過殘端接受腔作用于支撐板。在髖離斷假肢處于中點支撐期時,上身動作或姿態會導致人體重心的偏移,支撐底板的受力分析描述相對于單點受力,均勻載荷模型更為合適。現將支撐底板分為兩個受載區域,底部水平面承受較大的均勻載荷q1,傾面受較小的均勻載荷q2,當人體上身發生前傾或后仰動作時,支撐底板的載荷分布發生變化可相應地增大q2或q1。結合現有髖關節的運動特點,現有髖離斷假肢關節旋轉設有一定范圍,圖5狀態下假肢部分與支撐底板的相對轉動方向同標示方向。
圖5(a)所示的力學分析:
FA1=q1(a+htanβ1)+q1(b-htanβ1)+q2c
(5)

(6)
圖5(b)所示的力學分析:
FA2=q1a+q1b+q2c
(7)
(8)
綜上,FA1=FA2,即表示在兩種不同結構上施加等大的作用力,且當MA>0時,假肢處于穩定狀態;MA<0時,假肢結構不穩定,支撐底板有前傾的危險。
MA1-MA2=q1htanβ1(a+b)+q2chtanβ1
(9)
其中β1>0,故MA1-MA2>0,且隨著β1角度的增大而增大,相比較于圖5(b)所示結構,圖5(a)所示結構能夠承受更大的前傾力,站立位能夠提供更穩定的支撐。綜上所述,矢狀面內β角的存在是造成步態不對稱的關鍵,但β角的存在又對患者站立位起到一定的穩定作用。
3 擬合人體股骨旋轉中心的髖關節假肢機構設計
遠程運動中心(remote center of motion,RCM)機構[13-14]是指在機構遠端提供一個虛擬的旋轉中心,機構可以繞該虛擬的旋轉中心自由旋轉,見圖6。

圖6 遠程運動中心機構原理圖Fig.6 Mechanism diagram of the remote motion center
由圖6可知,遠程運動中心機構由雙平行四邊形平面耦合形成,A點、B點為固定鉸鏈,l表示末端執行器安放位置,P點繞O點做圓周運動且運動軌跡在圖中已通過點劃線標出。
造成現有佩戴髖離斷假肢患者步態不對稱的原因主要是因為假肢側旋轉中心與健側股骨旋轉中心在矢狀面內高度不重合。遠程運動中心機構可以使末端執行器繞空間內某個固定點做旋轉運動,其運動特征與人在正常行走過程中股骨運動特征相符,且遠程運動中心機構用于髖離斷假肢可以將虛擬的旋轉中心定位到髖離斷患者殘端髖臼位置,見圖7。

圖7 新型髖離斷外動力假肢模型Fig.7 A new type of power hip disarticulation prosthesis model
選定站姿為初始姿態,曲腿方向為正向轉動,整個髖離斷假肢可以實現-15°~90°的自由旋轉。其中正常步態周期內假肢擺動角度范圍-10°~55°,坐姿假肢髖關節角度最大值達到90°。假肢底座設有一定厚度,且部分包容假肢主體與之滑動接觸,當使用者站立時,部分人體重力可直接作用于假肢主體,有助于提高假肢的最大承重能力。
4 運動學分析
見圖8,若定義C點為坐標原點(0,0),旋轉中心O點可表示為(-bcosβ,-bsinβ),C點到D點的距離由c表示,α為FG偏離初始位置夾角,規定順時針方向為正,逆時針方向為負,則末端F點的運動軌跡可表示為:

圖8 遠端定心結構示意圖Fig.8 Structure diagram of distal centering
(10)
其中,當α=π/2時,對應人體坐姿。
髖離斷外動力假肢的運動學模型見圖9,旋轉中心O點到膝關節K點的距離,近似模擬了患者健側股骨的實際尺寸,DF的長度以及初始位置DF與水平面的夾角β決定了旋轉中心O點的位置,可以通過調節DF的長度與β的大小來控制旋轉中心O的位置,使得旋轉中心在殘肢髖臼中。電機M順時針轉動,模擬屈髖過程,電機M逆時針轉動,模擬伸髖過程,整個運動過程旋轉中心保持不變,且位于殘肢髖臼中。
假肢中髖關節角度變量μ與遠端中心機構中FG與GN夾角θ的關系為:
θ=90°+μ-β
(11)
電機轉速ω與θ變化量Δθ之間的關系可表述為:
(12)
由圖8可知,合理的桿長設計可使FG(模擬大腿)相對于骨盆的虛擬轉動中心始終在髖臼中心,提高了假肢旋轉中心與健側股骨旋轉中心的重合度;圖9解釋了外動力假肢的驅動原理,為實驗樣機的制作提供了理論依據。

圖9 新型髖離斷外動力假肢運動學模型
5 實驗
受試者(男,身高175 cm,體重60 Kg,左側髖關節部位截肢)穿戴傳統假肢在跑步機上以1 m/s的速度行進,通過固定在受試者肢體及假肢上的角度傳感器采集步態數據,見圖10(a)。將采集到的健側髖關節角度數據輸入新型髖離斷外動力假肢中,搭建測試平臺,機械臂末端模擬受試者骨盆運動軌跡,跑步機速度設置為1 m/s,通過固定在假肢上的角度傳感器采集步態中假肢髖關節角度數據,見圖10(b)。

圖10 步態測試實驗平臺(a).受試者佩戴傳統假肢步態采集;(b).新型髖離斷外動力假肢步態測試平臺Fig.10 Gait test experimental platform(a).the subject wears traditional prosthesis for gait acquisition;(b).a new hip disarticulation external power prosthetic gait test platform
骨盆左右方向運動軌跡數學模型[15]:

(13)
骨盆上下方向運動軌跡數學模型:
(14)
式中,v表示步行速度(m/s),h表示身高(m),k=0,1,2…。
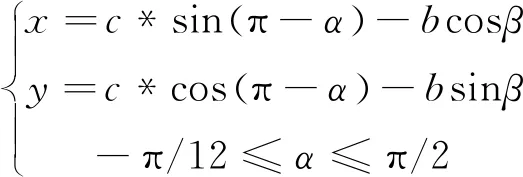
圖11(a)為采集到的受試者健側與假肢側髖關節角度變化,由圖中髖關節角度變化趨勢可知,受試者步態存在明顯的不對稱,且假肢側的髖關節角度變化明顯小于健側髖關節角度變化。圖11(b)為一個步態周期內受試者健側、傳統假肢及新型假肢髖關節角度變化對比,在一個完整步態周期內,新型外動力假肢的髖關節角度變化整體上更接近受試者健側髖關節角度變化規律。
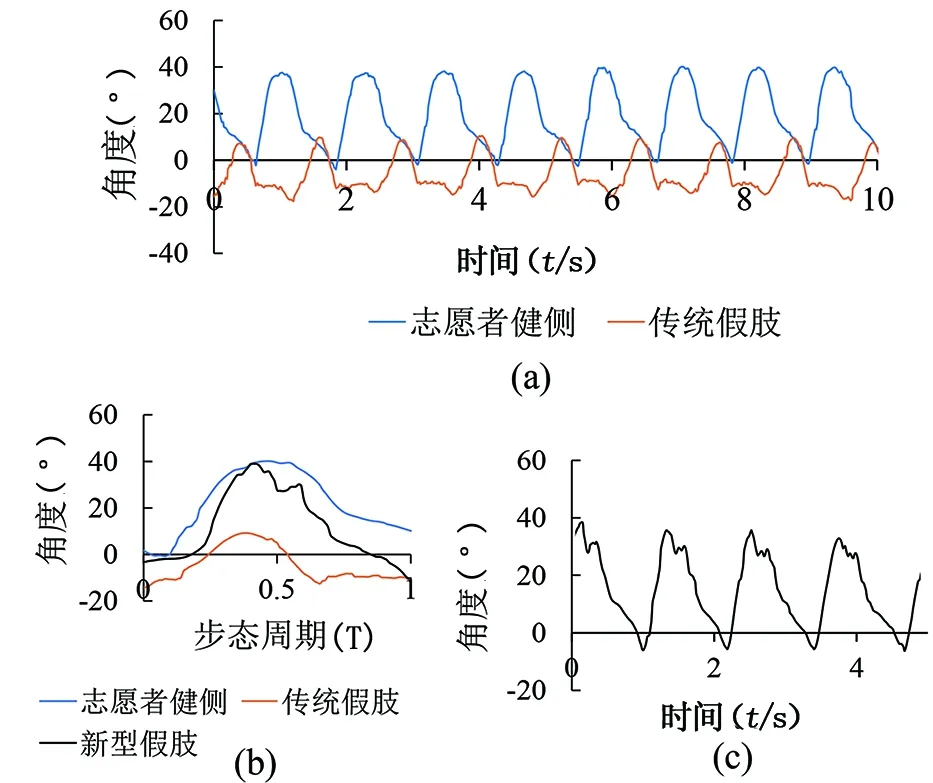
圖11 髖關節角度數據采集結果 (a).受試者佩戴傳統假肢的髖關節角度信息;(b).一個步態周期內新型假肢、傳統假肢以及健側髖關節變化比較;(c).1 m/s步速下新型假肢髖關節角度信息Fig.11 Results of hip joint angle data collection
6 結論
本研究通過建立幾何模型,分析出假肢髖關節旋轉軸心與人體健側旋轉軸心不重合是佩戴傳統髖離斷假肢患者步態不對稱的原因,使用雙平行四邊形機構完成了新型髖離斷外動力假肢的制作,成功地將髖離斷假肢的旋轉軸心近似定位到患者殘肢端的髖臼位置,以提高佩戴新型髖離斷假肢患者兩側髖關節旋轉軸心的重合度,從而改善髖離斷假肢使用者步態不對稱的問題。增加電機是為了實現對患者行走過程中的屈髖助力,以幫助解決假肢使用者體力消耗增加的問題,具體將通過患者健肢側肌電信號來控制假肢的運動狀態,這是本研究后續的研究重點,也是實現智能假肢控制的重要方向。