仿生原型毫-微牛級力測試技術研究進展
2021-07-25 16:30:32閆征王立新潘盼
河北科技大學學報 2021年3期
閆征 王立新 潘盼
摘 要:許多動物依靠自然進化形成能夠展現優異功能的身體結構,以其作為仿生原型,可為工程領域存在的復雜問題提供有效解決途徑。仿生原型毫-微牛級力測試技術可為揭示仿生原型運動力學機制提供必要的測試手段。從呈現優異功能特性的典型仿生原型入手,綜述了用于仿生原型運動功能與材料物理特性定量表征的毫-微牛級力測試技術研究進展,重點分析了傳感器測力系統、離心運動測力系統、圖像處理測力系統的原理與功能,指出仿生原型毫-微牛級力測試技術后續研究應重點關注以下3個方面:1)傳感器測力系統應提升其動態響應特性與測試精度,以精確表征仿生原型的運動特性;2)離心運動測力系統應提升測試平臺轉速信息采集精度與高速攝像機圖像清晰度,以準確表征微小仿生原型與材料表面的交互作用;3)圖像處理測力系統應考慮如何從圖像中精確提取微位移信息,以提高測力系統的測試精度與準確度。
關鍵詞:仿生學;仿生原型;毫-微牛級力;運動特性;測試技術
中圖分類號:TB17 文獻標識碼:A
doi:10.7535/hbkd.2021yx03001
Research progress on milli-micro Newton level force measurement technology of bionic prototype
YAN Zheng, WANG Lixin, PAN Pan
(School of Mechanical Engineering,Hebei University of Science and Technology,Shijiazhuang,Hebei 050018,China)
Abstract:Depending on the excellent functional body structure obtained by the natural evolution, many animals have become bionic prototypes, which provide effective solutions for complex problems in the engineering field. The milli-micro Newton level force measurement technology of bionic prototype can provide the necessary testing instrument for revealing the locomotion mechanical mechanism of these bionic prototypes. Starting from the excellent functional characteristic of typical bionic prototypes, the research progress of milli-micro Newton level force measurement technology for quantitative characterization of the locomotion function and material physical properties of bionic prototypes was summarized. Especially, the principle and function of force measurement system with sensor, the principle and function of centrifugal movement force measurement system and the principle and function of image processing force measurement system were analyzed. Three aspects are pointed out some important aspects that bionic prototype milli-micro Newton level force measurement technology should focus on in the future:the force measurement system with sensor should improve the dynamic response characteristicsand test accuracy, in order to accurately characterizethe motion propertyof the biomimetic prototype; the centrifugal movement force measurement system shouldpromote the accuracy of test platform speed information collection and the imagedefinition of high-speed camera, in order to accurately characterize interaction between the micro-bionic prototype and material surface;theimage processing force measurement systemshould consider how to accurately extract micro-displacement information from images, in order to improve the test precision and accuracyof the force measurement system.
Keywords:bionic;bionic prototype;milli-micro Newton level force;locomotion characteristic;measurement technology
工程仿生學依靠學科前沿性正逐步滲透到人類日常生活各個領域,因通過模擬生物獨特的身體結構與功能特性可為復雜問題提供有效解決途徑,而受到國內外眾多學者的廣泛關注[1]。大自然數百萬年的發展演變使得生物逐步獲得適應棲息環境的生存能力和獨特的運動功能特性。運動是動物繁衍、生殖、捕食的基礎,同時也是進行遷徙活動的必備技能,許多動物依靠自然進化形成能夠展現優異功能的身體結構,成為備受關注的仿生原型[2-3]。基于為復雜工程問題提供針對性解決途徑的意圖,國內外眾多學者開展對仿生原型運動功能與材料物理特性的定量表征研究,為仿生原型優異功能特性產生機制的科學揭示提供了必要的測試手段,極大促進了仿生原型毫-微牛級力測試技術的發展。本文綜述了仿生原型運動功能與材料物理特性定量表征的毫-微牛級力測試技術研究進展,重點分析傳感器測力系統、離心運動測力系統、圖像處理測力系統的原理與功能,指出仿生原型毫-微牛級力測試技術后續研究應重點關注的方面。
1 仿生原型的優異功能特性
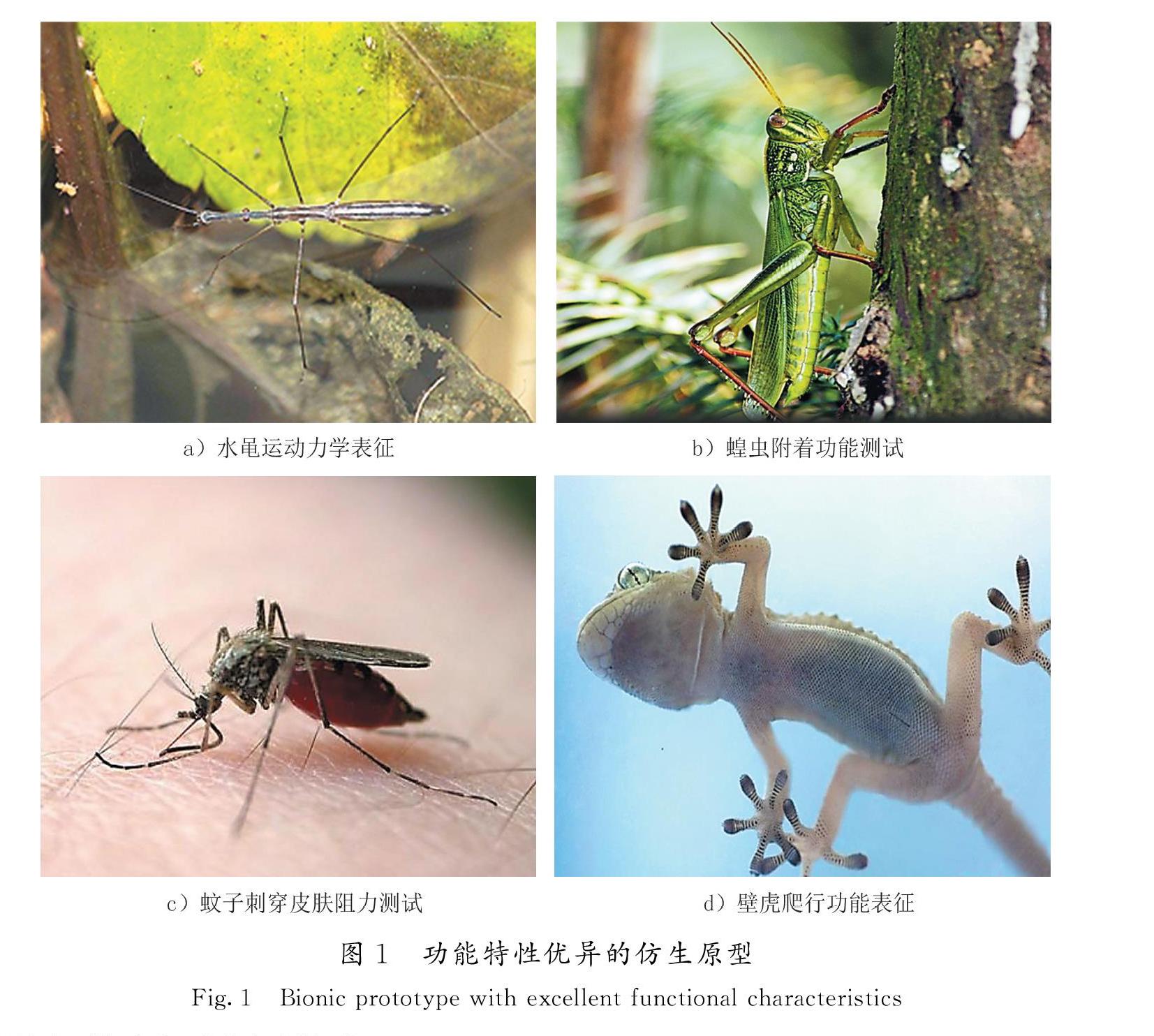
人類借助動植物數百萬年進化而來的奇特身體結構與優異功能特性來服務于自身,以期獲取工程復雜問題的有效解決途徑[4]。水黽、蝗蟲、蚊子、壁虎等動物具有優異的運動功能,憑借自身優化而成的身體結構可完成水面站立、表面附著、刺穿皮膚、運動爬行等功能。水黽可在水面穩定站立并能劃水前行(見圖1 a)),其腿部由微米級剛毛與剛毛表面附著的納米級螺旋溝槽共同構成的微納復合結構能夠呈現顯著的超疏水潤濕特性,這對其奇特運動特性發揮著關鍵作用。有學者開展了水黽腿部脫離水面的運動力學研究,通過PVDF壓電傳感器來測量脫離力,約為0.31 μN,這為以水黽為仿生原型研制微型水面機器人提供了重要基礎[5]。蝗蟲擁有獨特的附著、彈跳等運動特性(見圖1 b)),其彈跳運動原理可為仿生跳躍機器人研制提供設計靈感。蚊子依靠其特有的刺吸式口器能夠低阻力刺入人體皮膚,達到吸取血液而不被輕易覺察的目的(見圖1 c)),這為無痛注射器仿生研制提供了明確的仿生原型,學者們為此開展了仿生原型、無痛注射針頭仿生樣件刺入人體皮膚過程中的穿刺阻力測試研究[6-10]。壁虎腳掌表面具有剛毛附著器官(見圖1 d)),研究壁虎腳掌剛毛在接觸表面迅速黏附、脫黏附的力學機制,測試壁虎在材料表面的運動力學行為,對壁虎運動力學機制揭示和仿生爬壁機器人在結構功能、步態規劃和控制規律等方面的設計具有重要意義[11-13]。
東南大學王玉娟團隊[14-16]利用手動懸臂移動法將二氧化硅微球(直徑15 μm)與豬籠草葉籠滑移區表面接觸并施加法向力,測試黏附力和摩擦力用以揭示滑移區的反黏附特性,這為接觸力提供了測試手段。昆蟲附著系統在材料表面接觸力的測試表征是揭示昆蟲附著機理的必要環節,以豬籠草滑移區為仿生原型研制致災農業昆蟲捕集滑板,需要測試蝗蟲、螞蟻和飛蛾等致災農業昆蟲在滑移區、捕集滑板的毫牛級附著力和摩擦力[17]。壁虎在墻面、天花板能夠平穩附著與自如行走,這得益于其腳掌產生的強大黏附力。南京航空航天大學戴振東團隊[18-20]測試壁虎在地面、墻面、天花板的運動接觸力以揭示單步態周期內大壁虎的運動特征,結果表明,壁虎采用前腳緩沖、后腳加速的運動方式使其在短時間內以最少能量損耗來達到期望的運動速度,在天花板運動時其前后腳將產生較大的法向反力來確保自身不會掉落,以此顯著提高自身運動的安全性和可控性。仿生原型功能特性的定量表征依賴于性能優異的毫-微牛級測力系統,國內外眾多學者對此開展了廣泛研究。
2 仿生原型毫-微牛級力測試技術
2.1 傳感器測力系統原理與功能
AUTUMN等[21-22]研制出二維微牛級壓阻式傳感器來測試壁虎腳掌剛毛受預加法向載荷作用下在材料表面滑移的黏附力,該測力裝置具有2個獨立并呈水平、垂直方向的傳感器分支,壁虎腳掌剛毛在基底材料滑移5 μm后切向黏附力最大值為(194±25)pN;分析指出壁虎與物體表面產生的黏附作用源于分子間范德華力,這可揭示壁虎爬行時其腳掌剛毛與接觸面的黏附機制;測力端硅尖懸臂梁極其精細,制備難度極高,后續研究應對測力端靈敏元件進行等效替代以降低其研制難度。對壁虎腳掌剛毛黏附功能的深入測試表征顯示,其黏附功能易受空氣濕度影響,黏附力會隨濕度增加而增大,這使壁虎黏附機制研究進入了新階段[23-24]。HUBER等[25]為測試壁虎腳掌剛毛黏附力,將從壁虎腳掌上切下的剛毛粘在原子力顯微鏡懸臂末端,再與基底接觸用以測試黏附力,測試過程中獲取懸臂梁的位移信息,再根據力-位移特性方程計算得到黏附力數據,結果顯示剛毛拉脫試驗中的黏附力約為10 nN,該測試數據準確表征了壁虎腳掌單根剛毛在材料表面的黏附強度。上述測力設備僅適用于測試非活體生物,應研制適用于測試活體生物足掌剛毛黏附力的測試系統,以使結果數據更加接近真實狀況。
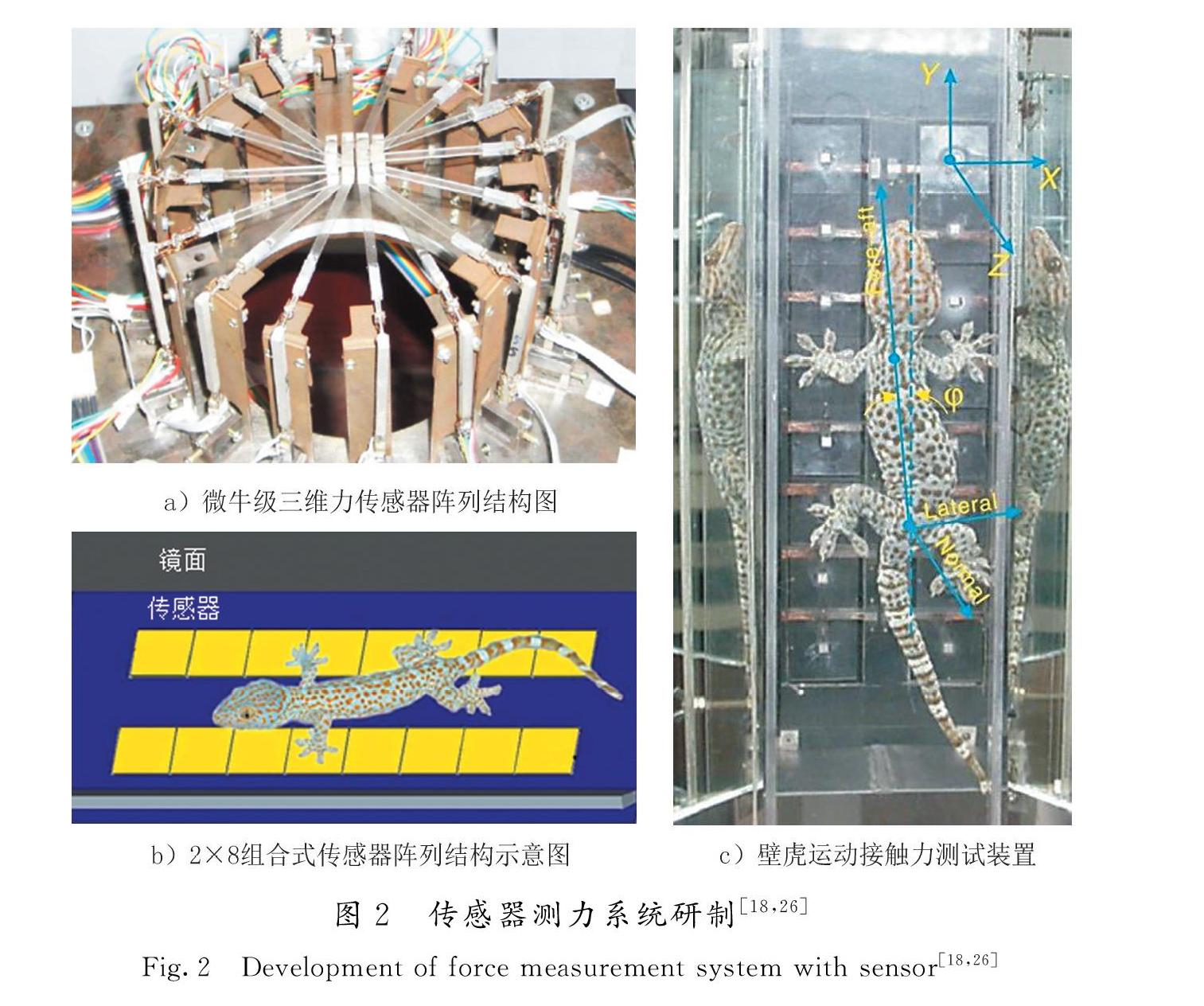
南京航空航天大學戴振東團隊[26]研制出多量程三維力傳感器來測試水黽運動接觸力(見圖2 a)),由16個三維微力傳感器組成4×4式傳感器陣列,量程為10 mN,分辨力可達10 μN,研究發現水黽在水面的劃行力為0.87~1.32 mN,且單位腿長的劃行力為0.3~0.4 mN/cm;數據顯示水黽運動劃行力與自身體重成正比,水黽還會依靠水面安全裕度來保證身體不陷入水花。該團隊后續研制出測試壁虎足掌三維接觸力的測試系統(見圖2 b)和圖2 c)),由16個傳感器組成2×8式傳感器陣列,用于測試壁虎行走過程中在材料表面產生的接觸力,量程為1.5 N,分辨力為3 mN[27]。該測力設備獲取的壁虎運動特征數據,可加深學者對壁虎運動功能的認知,并能推動仿生爬壁機器人的研制,未來應研制適合壁虎遠距離爬行的測試平臺,以獲取更加符合實際的運動特征信息。
田樹林等[28]研制三維力傳感器測試系統用來測試動物爬壁過程中腳掌與材料表面的接觸力,該測力系統由測力傳感器陣列、信號調理模塊、數據采集模塊、動態圖像記錄模塊等部分組成,其中測力傳感器為自行研制的H型雙孔平行梁式毫牛級力傳感器,高速攝像機可獲取爬壁過程中的直觀影像資料;將樹蛙作為測試對象進行垂直表面上的運動力學測試,結果顯示樹蛙爬行過程中的橫向接觸力為7 mN,縱向接觸力為170 mN,法向接觸力為68 mN;靜止狀態下樹蛙的橫向接觸力為3 mN,縱向接觸力為 63 mN,法向接觸力為30 mN。這些力學數據可加深學者對樹蛙運動特性的認知,為深入研究動物爬壁過程中運動規律和功能特性提供測試手段,并為性能優異的仿樹蛙爬壁機器人的研制提供數據基礎;未來研究應提升測力傳感器的制造工藝,充分考慮測力傳感器的動態力學性能,以使試驗數據更具準確性。
JI等[29]研制出由上下交錯共24個三維力傳感器組成的仿圓柱正八邊形陣列測力系統,選擇T型三維毫牛級力傳感器作為測量元件,以樹蛙為測試對象進行爬壁過程的接觸反力測試,結果顯示樹蛙在高曲率表面運動時其腳掌將產生用以黏附于曲面或非黏性材料表面的法向力,分析指出樹蛙運動時其前肢起主導作用而后肢起輔助冗余作用。該測試系統用以獲取動物在仿圓柱體表面上爬壁過程的黏附力,但該項測試僅研究動物在基底的局部表面運動,不能進行其他復雜表面的黏附力測試,后續研究應重點關注樹蛙在不同層次表面、復雜曲面上的運動力學測試,以推動仿爬壁機器人的研制。SUN等[30]利用PVDF材料研制出新型動態力傳感器來測定不同提升速度下水黽腿部脫離水面的附著力,測試方法為將體積為5 μL的液滴滴落至力傳感器表面,隨后將水黽腿部與液滴脫離并建立脫離水面模型,通過光學顯微鏡和高幀數攝像機來觀測水面變形程度,根據力與提升速度的關系來分析附著力的影響因素以調控機制,測試結果顯示提升速度由0.02 m/s上升至0.40 m/s時水黽腿部附著力明顯下降,分析指出微納復合結構是保證其在水面快速劃行的關鍵因素。
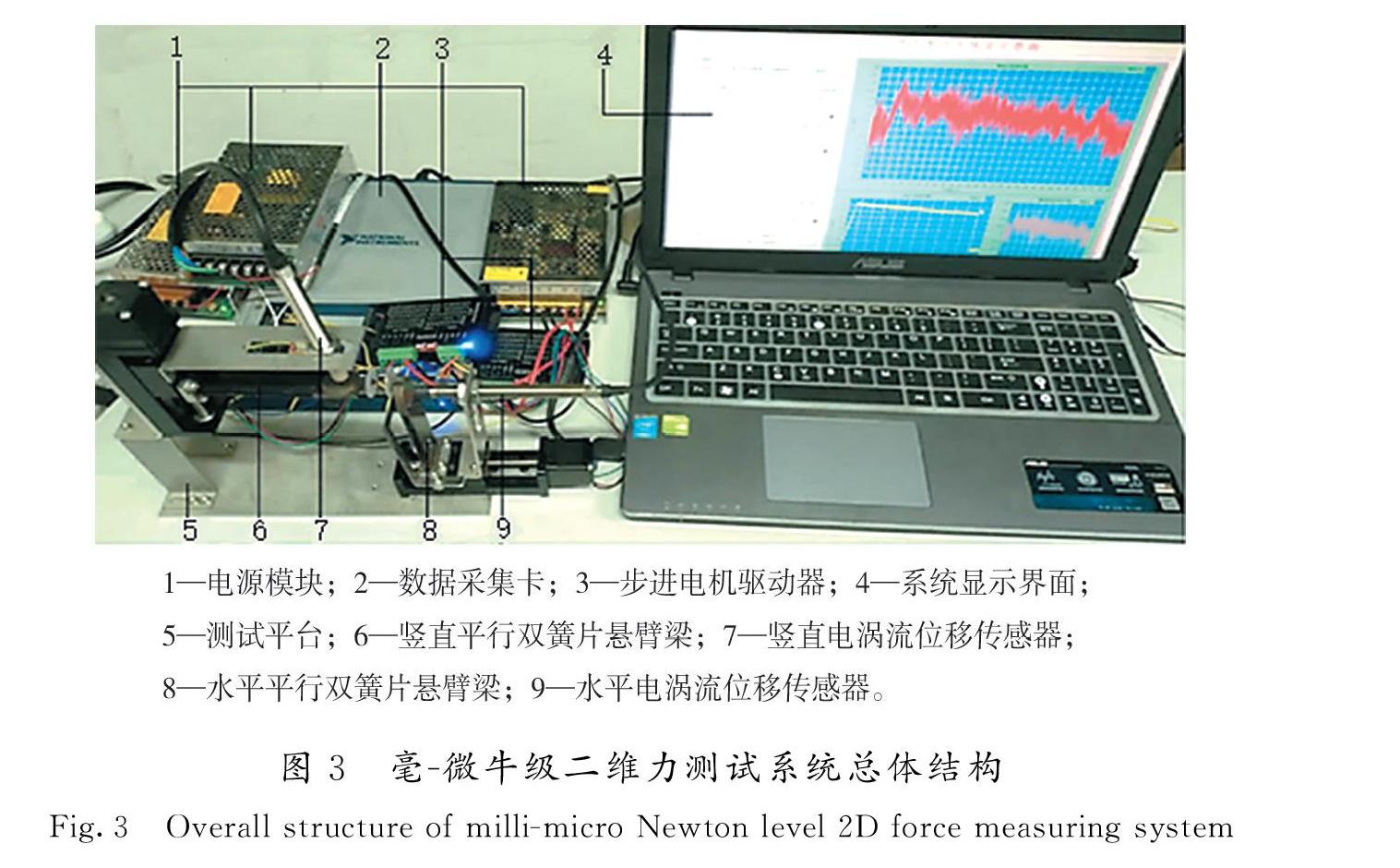
為滿足工程仿生研究對仿生原型產生的毫-微牛級力測試需求,人們研制出毫-微牛級二維力測試系統(見圖3),量程為800 mN,精度可達50 μN;基于LabVIEW編寫數據處理與界面顯示程序,可顯示與存儲仿生原型產生的毫-微牛級力;運行結果顯示酸棗樹鉤刺刺入動物肝臟的刺穿阻力最大為329.76 mN,表明該系統能夠滿足仿生原型的測試需求[31]。該毫-微牛級二維力測試系統所采用的平行雙簧片懸臂梁的彈簧片厚度為100~200 μm,易受到溫度、濕度、振動等外界環境因素影響,對測試系統的準確性造成不利影響;后續研究需要研制功效持久穩定且不受外界因素干擾的平行雙簧片懸臂梁。
學者研制出的附著力測試系統量程為0~3 N,精度為1 mN,基于LabWindows/CVI編寫的數據采集程序能夠實時顯示附著力的變化;該測試系統可準確獲取蝗蟲在不同材料與傾斜角度捕集滑板的附著力,可為昆蟲附著系統與材料表面交互作用的定量表征提供可供選擇的測試手段[32-34]。后續需對該測力系統硬件結構進行優化,研制出拉壓式微力測試系統,可滿足致災農業昆蟲捕集滑板仿生研制過程中需要測試昆蟲在材料表面的附著力、摩擦力和剪切力、斷裂力的需求[35];利用該拉壓式微力測試系統測試蝗蟲爪尖的剪切力,結果為197.4~243.6 mN[36-37]。該測力系統能夠準確獲取仿生原型在材料表面產生的附著力與摩擦力,還可準確表征仿生原型本身的剪切力與斷裂力,為仿生原型運動特性與材料特性的精確表征提供了必要的技術手段。
AZUMA等[38-39]利用自行研制的三維力傳感器測試果蠅運動產生的飛行力,果蠅身體質量為1 mg且身體長度為3 mm,翅膀的撲動頻率為200 Hz,通過固化膠將探針與果蠅背部進行黏合,懸臂探針發生形變時會使得壓敏電阻阻值發生變化,利用探針產生的形變量與彈性系數相乘進行微力測量,測力數值會隨著果蠅翅膀拍打頻率實時變化,測試發現果蠅飛行力的最大值為40 μN。該測力系統可為研究飛行昆蟲運動功能提供必要的測力設備,能夠為小型飛行機器人仿生研制提供基礎數據;后續工作應研制無干擾狀態下飛行昆蟲運動功能定量表征的測力設備,以獲取更加切合實際的數據信息。
2.2 離心運動測力系統原理與功能
離心式測力系統的研制主要基于離心原理設計,測試對象被放置在測試平臺表面,測試對象與測試平臺表面產生的附著力為其提供離心運動所需要的離心力,電機轉速不斷增大,測試平臺轉速增加,測試對象與測試平臺間產生的附著力不足以維持離心運動所需要的離心力,導致測試對象脫離測試平臺,測試對象與測試平臺發生脫離時的離心力即為測試對象的最大附著力。
LABONTE等[40]和FEDERLE等[41]利用離心原理測試昆蟲在材料表面產生的附著力,根據高幀數攝像機在臨界脫離時刻采集到的圖像即可獲取離心運動半徑信息,結合該時刻的離心運動轉速與測試對象質量,便可計算獲取最大附著力。后續有學者對上述離心測力運動裝置進行優化,研制出可調整測試平臺角度的離心運動測力系統,結果顯示當測試平臺傾斜角度為90°時,螞蟻在垂直玻璃表面上的脫離轉速為305 r/min,垂直方向的最大附著力為1.02 mN[42-43]。學者持續優化基于離心原理的測力系統結構,使其運行更加平穩并可顯著提高測試精度(0.1 mN),可用于精確表征螞蟻、甲蟲和飛蛾等仿生原型在不同材料表面的運動特性[44]。該類測力儀器可定量表征體型較小昆蟲的運動功能,獲取的運動特征信息能夠揭示仿生原型與接觸表面的相互作用機制;后續研究應關注轉速信息采集精度與高速攝像機圖像清晰度,以提高吸附力信息的精確度。
2.3 圖像處理測力系統原理與功能
圖像處理技術是借助計算機強大的圖像處理功能將高速攝像機所拍攝的圖像進行分析處理以獲取微小變形量,據此計算出測試對象與材料表面、液態環境等所產生的微-納級運動力。清華大學田煜團隊[45-47]利用陰影提取法觀測水黽腿部與水面接觸產生的陰影面積來計算獲取運動支撐力,根據水黽在水面上劃行產生的陰影,通過阿基米德原理對水黽腿部進行三維模型重建并計算獲取所產生的運動支撐力;結果表明水黽運動支撐力受水面凹陷深度、寬度和長度影響,最大水面凹陷深度與運動支撐力不成正比,水黽腿部產生的水渦深度為0.02~0.09 mm,支撐力為0.3~1.0 μN,這為揭示水黽腿部運動支撐力的大小并為研制出功能優異的仿生水黽機器人提供數據基礎。后續該團隊利用陰影提取法觀測水黽腿部的運動陰影圖像(見圖4),測試裝置的正上方放置點光源,通過照射水黽體表而在水面底部產生陰影區域,照相機放置于水容器正下方可拍攝獲取水黽在水面站立時產生的陰影面積,通過對所拍攝的陰影圖像進行分析,計算獲取運動支撐力;結合水黽運動數據和運動軌跡對其腿部功能特性與運動機理進行研究,結果表明水黽前肢和后肢支撐身體重量以起到穩定作用,后腿可調整運動方向和行進速度,這為研制可在水面行走并具備高推進效率的微型水面機器人提供了理論支持[48]。基于圖像處理技術進行昆蟲運動支撐力測試需要采集大量高清圖片并提取微位移數據信息,高速攝像機在幀數、像素等方面的選擇至關重要,后續研究應考慮如何從圖像中更加精確地提取微位移信息,以提高測力系統的準確度。
ZHANG等[49]搭建摩擦力測試裝置用來定量分析豬籠草葉籠滑移區的減摩效應,將蟋蟀前腿與測試材料表面接觸并施加法向力,使兩者間產生相對滑動以使懸臂梁產生撓度,用來間接獲取摩擦力,結果顯示昆蟲因其體重不同而在滑移區產生的減摩效果也不同,滑移區因月骨體產生的各向異性能夠顯著影響測試對象的摩擦行為。遼寧工業大學孔祥清團隊[50]研制精度可達0.1 μN的新型微力測試裝置,量程為2 000 μN,該測力裝置具有較高的測試精度,可為水生昆蟲腿部運動支撐力測試系統研制提供技術參考,并可推動仿生水面機器人的研制。運用高幀數攝像機獲取仿生原型運動視頻并轉換成圖像,再基于圖像處理技術分析圖像計算獲取腿部結構在水面的浮力,具有測試精度高、易于操作等特點。
3 研究與展望
生物在經歷數百萬年的自然進化后逐漸形成了適應棲息環境的生存能力,以水黽、蝗蟲、蚊子、壁虎等動物為仿生原型進行支撐力、附著力、跳躍力、刺穿力、爬行力等運動特性與材料特性研究,可定量表征仿生原型的功能機制,形成明確的仿生原理,為解決復雜工程問題提供理論基礎。本文從自然界生物所擁有的優異功能特性入手,綜述了用于仿生原型運動特性與材料特性定量表征的測力技術研究進展,重點分析了傳感器測力系統、離心運動測力系統、圖像處理測力系統的原理與功能。
仿生原型測力技術目前存在的問題與后續研究需要重點關注的方面主要有以下4點。
1)測力傳感器動態響應特性低與仿生原型運動空間小 測力傳感器的動態響應特性是準確測試昆蟲運動力學特征的關鍵,材料屬性、制備工藝等會對測力傳感器的動態響應特性產生較大影響,進而影響測試數據的準確性。未來研究應優化測力傳感器的制備工藝,提升傳感器的動態響應特性,以精確表征仿生原型的運動力學特性。昆蟲運動力學特性測試過程中,運動空間小會影響昆蟲的生理活性,導致無法準確獲取昆蟲正常狀態下的運動力學特征信息,因此應增大測力系統的測試平臺,以獲取更加切合真實狀況的昆蟲運動力學特性信息。
2)基于離心運動測力系統轉速信息獲取精度低 小型昆蟲附著力的準確測試依賴于離心運動測力系統轉速信息的精確獲取,應保證轉速信息的采集精度,提高對微小仿生原型附著系統與材料表面交互作用的定量表征準確性。
3)基于圖像處理測力系統的圖像采集清晰度低 高速攝像機所采集圖像的清晰度會對測力準確性產生影響,應選擇幀數和像素相匹配的高速攝像機來獲取像素較高的圖像,并對圖像進行后期處理,以提高微位移信息的提取準確度,獲取更加精確的昆蟲運動力學信息。
4)無干擾狀態下仿生原型接觸反力測試系統研制不足 仿生原型(甲蟲、蒼蠅等飛行昆蟲)運動特性的定量表征需要獲取其在無干擾狀態下的接觸反力測試數據,這需要研制測試過程無干擾的昆蟲接觸反力測試系統,滿足測試過程無干擾,精確獲取仿生原型起飛/降落過程中的運動力學特性,為微型飛行器仿生研制提供原始數據基礎。
生物在經歷數百萬年的自然進化后逐漸形成了適應棲息環境的生存能力,以水黽、蝗蟲、蚊子、壁虎等動物為仿生原型進行支撐力、附著力、跳躍力、刺穿力、爬行力等運動特性與材料特性研究,可定量表征仿生原型的功能機制,形成明確的仿生原理,為解決復雜工程問題提供理論基礎。后續研究過程中,傳感器測力系統應提升傳感器的動態響應特性,降低外部環境因素的干擾,以精確表征無干擾狀態下仿生原型的運動特性與材料特性;離心運動測力系統應關注轉速信息采集精度與高速攝像機圖像清晰度,提高對微小仿生原型附著系統與材料表面交互作用的定量表征準確性;圖像處理測力系統應考慮如何從圖像中更加精確地分析提取微位移信息,提高測力系統的測試精度。
參考文獻/References:
[1] 孫久榮,戴振東.仿生學的現狀和未來[J].生物物理學報,2007,23(2):109-115.
SUN Jiurong,DAI Zhendong.Bionics today and tomorrow[J].Acta Biophysica Sinica,2007,23(2):109-115.
[2] 梁云虹,任露泉.自然生境及其仿生學初探[J].吉林大學學報(工學版),2016,46(5):1746-1756.
LIANG Yunhong,REN Luquan.Preliminary study of habitat and its bionics[J].Journal of Jilin University (Engineering and Technology Edition),2016,46(5):1746-1756.
[3] 羅靜,樊俊兵,王樹濤.納米生物仿生技術研究進展[J].中國科學:生命科學,2020,50(7):715-733.
LUO Jing,FAN Junbing,WANG Shutao.Research progress of nano-bio-inspired technology[J].Scientia Sinica(Vitae),2020,50(7):715-733.
[4] BUSH J W M,HU D L.Walking on water:Biolocomotion at the interface[J].Physics Today,2005,38(1):339-369.
[5] 韓亞倩.基于靜電力的微力傳感器標定系統設計與應用研究[D].天津:天津大學,2017.
HAN Yaqian.Design and Application of the Microforce Sensor Calibration System Based on Electrostatic Force[D].Tianjin:TianjinUniversity,2017.
[6] 王京春,陳禹,李因武.仿生針刺作用下的高粘彈性材料減阻性能分析[J].科技通報,2017,33(11):44-46.
WANG Jingchun,CHEN Yu,LI Yinwu.Resistance reduction analysis for high viscoelastic material pierced by bionic-pinhead[J].Bulletin of Science and Technology,2017,33(11):44-46.
[7] 齊迎春,叢茜,齊欣.仿生減阻針頭穿刺過程中力學行為分析[J].醫用生物力學,2012,27(4):427-431.
QI Yingchun,CONG Qian,QI Xin.Mechanical behavior of bionic drag reduction needle during puncturing process[J].Journal ofMedical Biomechanics,2012,27(4):427-431.
[8] 王驥月,叢茜,齊欣,等.基于蟬口針形態的仿生針頭結構優化設計及減阻機理分析[J].吉林大學學報(工學版),2014,44(3):696-700.
WANG Jiyue,CONG Qian,QI Xin,et al.Optimum structural design and analysis of drag reductionmechanism of bionic needlesinspired by cicada stylet[J].Journal of Jilin University(Engineering and Technology Edition),2014,44(3):696-700.
[9] 彎艷玲,叢茜,齊迎春,等.凹槽形仿生針頭減阻試驗及機理分析[J].中國機械工程,2013,24(7):922-925.
WAN Yanling,CONG Qian,QI Yingchun,et al.Drag reduction experiment and mechanism analysis of concave groove needle[J].China Mechanical Engineering,2013,24(7):922-925.
[10]齊迎春,叢茜,王驥月,等.凹槽形仿生針頭優化設計與減阻機理分析[J].機械工程學報,2012,48(15):126-130.
QI Yingchun,CONG Qian,WANG Jiyue,et al.Optimization design and drag reduction mechanism research on groove shape bionicneedle[J].Journal of Mechanical Engineering,2012,48(15):126-130.
[11]王周義,王金童,吉愛紅,等.大壁虎在天花板表面的運動行為與動力學研究[J].科學通報,2010,55(9):841-848.
WANG Zhouyi,WANG Jintong,JI Aihong,et al.Gecko′s movement behavior and dynamics research on ceiling surface[J].Chinese Science Bulletin,2010,55(9):841-848.
[12]趙林林,于敏,戴振東.壁虎腳掌剛毛接觸力學性能試驗研究[J].潤滑與密封,2011,36(7):40-42.
ZHAO Linlin,YU Min,DAI Zhendong.Experimental studies on contact mechanics of geckos′ foot setae[J].Lubrication Engineering,2011,36(7):40-42.
[13]吉愛紅,葛承濱,王寰,等.壁虎在不同粗糙度的豎直表面的黏附[J].科學通報,2016,61(23):2578-2586.
JI Aihong,GE Chengbin,WANG Huan,et al.Adhesion of gecko on vertical surfaces with different roughness[J].Chinese Science Bulletin,2016,61(23):2578-2586.
[14]畢可東,宋小闖,王玉娟,等.豬籠草蠟質滑移區表面反粘附特性的研究[J].機械工程學報,2015,51(23):103-109.
BI Kedong,SONG Xiaochuang,WANG Yujuan,et al.Anti-adhesion mechanisms of nepenthes waxy slippery zone surface[J].Journal of Mechanical Engineering,2015,51(23):103-109.
[15]王玉娟,宋小闖,陳云飛.豬籠草捕蟲籠超滑表面黏附特性測量和抗黏穩定性分析[J].東南大學學報(自然科學版),2017,47(2):259-264.
WANG Yujuan,SONG Xiaochuang,CHEN Yunfei.Measurement of adhesion properties and analysis of anti-adhension stability onsuper-slippery surfaces of nepenthes pitchers[J].Journal of Southeast University(Natural Science Edition),2017,47(2):259-264.
[16]王玉娟,宋小闖,楊決寬,等.典型構筑植物表面不同濕度條件下黏附和摩擦特性研究[J].機械工程學報,2017,53(21):86-94.
WANG Yujuan,SONG Xiaochuang,YANG Juekuan,et al.Adhesion and friction properties of plant surfaces with typical architectures in different humidity conditions[J].Journal of Mechanical Engineering,2017,53(21):86-94.
[17]王立新,周強.基于豬籠草葉籠滑移區仿生的蝗蟲捕集滑板功效測試[J].農業機械學報,2011,42(5):222-225.
WANG Lixin,ZHOU Qiang.Function testing of locust slippery plate manufactured based on waxy zone of nepenthes pitchers[J].Transactions of the Chinese Society for Agricultural Machinery,2011,42(5):222-225.
[18]DAI Zhendong,WANG Zhouyi,JI Aihong.Dynamics of gecko locomotion:A force-measuring array to measure 3D reaction forces[J]. The Journal of Experimental Biology,2011,214(5):703-708.
[19]王周義,顧文華,吳強,等.墻面及天花板上大壁虎腳趾作用力測試和腳掌形態研究[J].中國科學:技術科學,2011,41(9):1161-1166.
WANG Zhouyi,GU Wenhua,WU Qiang,et al.Morphology and reaction force of toes of geckos freely moving on ceilings and walls [J].Scientia Sinica Technologica,2011,41(9):1161-1166.
[20]WANG Zhouyi,WANG Jintong,JI Aihong.Behavior and dynamics of geckos locomotion:The effects of moving directions on avertical surface[J].Chinese Science Bulletin,2011,56(6):573-583.
[21]AUTUMN K,PEATTIEA M.Mechanisms of adhesion in geckos[J].Integrative & Comparative Biology,2002,42(56):1081-1090.
[22]AUTUMN K,LIANG Y A,HSIEH S T,et al.Adhesive force of a single gecko foot-hair[J].Nature,2000,405(6787):681-685.
[23]HUBER G,MANTZ H,SPOLENAK R,et al.Evidence for capillarity contributions to gecko adhesion from single spatula nanomechanical measurements[J].Proceedings of the National Academy of Sciences of the United States of America,2005,102(45):16293-16296.
[24]SUN Wanxin,NEUZIL P,KUSTANDI T S,et al.The nature of the gecko lizard adhesive force[J].Biophysical Journal,2005,89(2):14-17.
[25]HUBER G,GORB S N,SPOLENAK R,et al.Resolving the nanoscale adhesion of individual gecko spatulae by atomic force microscopy[J].Biology Letters,2005,1(1):2-4.
[26]吉愛紅.動物運動接觸反力測試系統、實驗與分析[D].南京:南京航空航天大學,2007.
JI Aihong.Animals Surface Reaction Forces:Measuring System,Experiments and Analysis[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2007.
[27]張正杰.壁虎腳掌3維接觸力測試系統研制[D].南京:南京航空航天大學,2006.
ZHANG Zhengjie.Development of Measuring System for Insect′ 3-dimensional Ground Reaction Force[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2006.
[28]田樹林,王衛英,李偉.動物接觸力測試系統的研制與應用[J].測控技術,2011,30(4):5-7.
TIAN Shulin,WANG Weiying,LI Wei.Development of measuring system for animal′s surface reaction force[J].Measurement & Control Technology,2011,30(4):5-7.
[29]JI Aihong,YUAN Shanshan,ENDLEIN T,et al.A force-measuring and behaviour-recording system consisting of 24 individual 3D force plates for the study of single limb forces in climbing animals on a quasi-cylindrical tower[J].Bioinspiration & Biomimetics,2019,14(4):046004.
[30]SUN Peiyuan,ZHAO Meirong,JIANG Jile,et al.The study of dynamic force acted on water strider leg departing from water surface[J].AIP Advances,2018,8(1):015228.
[31]李云鵬,王立新,閆世興,等.仿生原型毫-微牛級二維力測試系統研制[J].河北科技大學學報,2020,41(2):105-113.
LI Yunpeng,WANG Lixin,YAN Shixing,et al.Design of bionic prototype milli-micro Newton level two-dimensional force testsystem[J].Journal of Hebei University of Science and Technology,2020,41(2):105-113.
[32]王立新,周強,羅瑞龍,等.蝗蟲在滑移捕集滑板上的附著力測試[J].農業機械學報,2010,41(12):195-198.
WANG Lixin,ZHOU Qiang,LUO Ruilong,et al.Attachment force test of locust on slippery trapping plates[J].Transactions of the Chinese Society for Agricultural Machinery,2010,41(12):195-198.
[33]WANG L X,ZHOU Q.Friction force of locust locusta migratoria manilensis (Orthoptera,Locustidae) on slippery zones of pitchers from four nepenthes species[J].Tribology Letters,2011,44(3):345-353.
[34]WANG Lixin,ZHOU Qiang,XU Shuyan.Role of locust Locusta migratoria manilensis claws and pads in attaching to substrates[J].Science Bulletin,2011,56(8):789-795.
[35]王立新,李榮廷.基于虛擬儀器Labwindows/CVI的拉壓式微力測試系統設計[J].河北科技大學學報,2013,34(6):487-493.
WANG Lixin,LI Rongting.Design of tension & compression micro force measuring system based on virtual instrument Labwindows/CVI[J].Journal of Hebei University of Science and Technology,2013,34(6):487-493.
[36]王立新,崔彥平,周強.災害蝗蟲附著系統爪尖的剪切強度測算[J].農業工程學報,2014,30(17):71-77.
WANG Lixin,CUI Yanping,ZHOU Qiang.Shear strength calculation of claw tip in attachment system of plague locust Locusta migratoria manilensis[J].Transactions of the Chinese Society of Agricultural Engineering,2014,30(17):71-77.
[37]王立新,黃風山,周強.致災農業昆蟲捕集滑板表面結構仿生構建與性能驗證[J].農業工程學報,2015,31(20):34-40.
WANG Lixin,HUANG Fengshan,ZHOU Qiang.Surface structure biomimetic design and performance testing of slippery trapping plate used for controlling agricultural insect[J].Transactions of the Chinese Society of Agricultural Engineering,2015,31(20):34-40.
[38]AZUMA K,TAKAHASHI H,KAN T,et al.Triaxial force sensor with strain concentration notch beam for measurement of insect flight force[C]// IEEE International Conference on Micro Electro Mechanical Systems.Paris:IEEE,2012:140-143.
[39]AZUMA K,TAKAHASHI H,KAN T,et al.Quantitative evaluation of the influence of dopaminergic neuron on flapping locomotion[C]// 2013 IEEE 26th International Conference on Micro Electro Mechanical Systems (MEMS).[S.l.]:IEEE,2013:5-8.
[40]LABONTE D,FEDERLE W.Scaling and biomechanics of surface attachment in climbing animals[J].Philosophical Transactions ofthe Royal Society of London,2015,370(1661):20140027.
[41]FEDERLE W,ROHRSEITZ K,HOLLDOBLER B.Attachment forces of ants measured with a centrifuge:Better ‘wax-runners have a poorer attachment to a smooth surface[J].Journal of Experimental Biology,2000,203(3):505-512.
[42]周群,何斌,岳繼光.螞蟻的吸附力來源及其分泌液作用[J].力學學報,2007,39(3):428-432.
ZHOU Qun,HE Bin,YUE Jiguang.Source of attachment forces of ants and the secretion effect[J].Chinese Journal of Theoretical and Applied Mechanics,2007,39(3):428-432.
[43]周群,何斌,錢明剛,等.昆蟲足墊吸附系統的摩擦力和吸附力實驗分析[J].上海理工大學學報,2008,30(2):143-146.
ZHOU Qun,HE Bin,QIAN Minggang,et al.Analysis on friction and adhesive force of insects pads[J].Journal of University of Shanghai for Science and Technology,2008,30(2):143-146.
[44]王立新,翟利剛.離心式昆蟲微力測試系統設計[J].河北科技大學學報,2014,35(1):1-5.
WANG Lixin,ZHAI Ligang.Design of centrifugal insect micro-force measuring system[J].Journal of Hebei University of Science and Technology,2014,35(1):1-5.
[45]ZHENG Yelong,LU Hongyu,YIN Wei,et al.Elegant shadow making tiny force visible for water-walking arthropods and updated archimedes′ principle[J].Langmuir,2016,32(41):10522-10528.
[46]YIN Wei,ZHENG Yelong,LU Hongyu,et al.Three-dimensional topographies of water surface dimples formed by superhydrophobic water strider legs[J].Applied Physics Letters,2016,109(16):163701.
[47]ZHENG Yelong,LU Hongyu,JIANG Jile,et al.Walking of spider on water surface studied from its leg shadows[J].Chinese PhysicsB,2018,27(8):084702.
[48]LU Hongyu,ZHENG Yelong,YIN Wei,et al.Propulsion principles of water striders in sculling forward through shadow method[J].Journal of Bionic Engineering,2018,15(3):516-525.
[49]ZHANG Pengfei,CHEN Huawei,ZHANG Deyuan.Investigation of the anisotropic morphology-induced effects of the slippery zone in pitchers of nepenthes alata[J].Journal of Bionic Engineering,2015,12(1):79-87.
[50]吳宏福,孔祥清,曲艷東.一種微小水生昆蟲水面浮力測量裝置的設計[J].科技通報,2017,33(10):15-19.
WU Hongfu,KONG Xiangqing,QU Yandong.Design of the measuring system for water-supporting force of small aquatic insects[J].Bulletin of Science and Technology,2017,33(10):15-19.
