基于位移的煤礦巷道安全監測現狀及趨勢
2021-07-28 12:35:26孟祥甜
礦山機械 2021年7期
孟祥甜
煤炭科學技術研究院有限公司 北京 100013
井 下開采是我國煤炭資源開采的主要方式,巷道圍巖失穩破壞造成的安全事故時有發生。對巷道圍巖進行監測預警,掌握巷道圍巖穩定性狀態及發展趨勢,對保障煤礦安全開采有重要意義。
巷道圍巖位移是巷道穩定性變化的最直觀物理量,可以表現出巷道的現有穩定狀態及發展趨勢。對巷道圍巖的表面及深部位移、變形值進行監測,預測其發展趨勢,可以對圍巖穩定性狀態進行較準確的預測預報。通過基于位移的圍巖穩定性監測預警,采取相應的防護措施,可以使礦井安全事故造成的災害降低到最低程度[1]。
研究表明,巷道圍巖的表面與內部位移變化可以反映不同施工工況對圍巖的力及應變的作用,且是巷道圍巖發生變化的最直觀表現。因此,巷道圍巖位移是礦壓監測的基本內容。國內外諸多專家進行了基于位移監測的巷道圍巖穩定性預測預報研究。
1 巷道圍巖表面位移監測現狀
表面位移監測是巷道圍巖穩定性監測的最常見方法。表面位移監測包括巷道頂板下沉、兩幫變形、底板變形、底鼓和上下兩幫變形監測,基于設置的安全閾值,判斷巷道圍巖的穩定性。
近年來,隨著計算機和人工智能技術的突破,巷道圍巖位移監測已從人工測量發展到自動化的接觸式和非接觸式監測。
1.1 接觸式監測
巷道圍巖位移接觸式監測可以分為人工工具法、收斂計監測法和巴賽特收斂系統監測法。
1.1.1 人工工具法
人工工具法是人工使用儀器進行接觸式測量,測量工具多為測槍、測尺、測桿和測繩等,測桿和測尺應用最為廣泛[2]。該方法設備成本較低,但勞動量大,監測效率有待提高。
1.1.2 收斂計監測法
收斂計由卷尺、鋼環、接頭等組成,是巷道圍巖位移監測的常用工具。使用巷道收斂計監測巷道位移時,需要在巷道的拱頂、拱腰、邊墻和周邊設置固定測樁[3]。該方法費用低、操作簡單,理論與實踐研究較完善,但勞動強度大、監測效率低、數據精度容易受到影響[4]。
1.1.3 巴賽特收斂系統監測法
巴賽特收斂計由 Richard Bassett[5]發明,巴賽特收斂系統監測法則是基于巴賽特收斂計進行測量。該系統由多個桿件單元鉸接形成測量環,安裝在巷道待測斷面,桿件單元內放置傾角傳感器進行角度監測。當巷道圍巖表面變形時,收斂系統的傾角傳感器即可測出圍巖變形。巴賽特收斂計通過傾角傳感器測量圍巖變形,可實現數據自動化采集與顯示。
巴賽特收斂系統監測法可實現巷道圍巖變形的高精度、自動化監測,便于數據自動采集與處理,監測結果的自動化與信息化顯示。
1.2 非接觸式監測
非接觸式監測有全站儀測量法、經緯儀前方交會法及激光測量等[6]。
1.2.1 全站儀測量法
在巷道圍巖表面位移監測中,使用全站儀可以進行距離、角度、高差和坐標等參數的監測,具有功能多、精度高及自動化的特點[7]。
巷道圍巖位移自動化全站儀監測系統可實現位移監測數據的自動監測、記錄、處理及預測預報等功能。全站儀監測系統由軟件和硬件兩部分構成,硬件包括全站儀、棱鏡及通信電纜,軟件為專用位移監測數據處理軟件。
自動化全站儀監測系統的原理為通過反射棱鏡自動跟蹤記錄多個巷道已開挖斷面的固定監測點,把傳統全站儀對固定斷面任意監測點的掃描變成對任意斷面固定監測點的掃描。由于全站儀三維監測法具有功能多、精度高、自動化的特點,因此在井下巷道位移監測中應用較多,但監測儀器易出現人為誤差,會對監測結果造成較大影響[8]。
1.2.2 經緯儀前方交會法
使用經緯儀,應用前方交會法,可實現巷道圍巖表面位移的監測[9]。經緯儀前方交會法適應性較強,但在實際應用中,需設計適合施工環境的方法和平差分析系統。經緯儀前方交會法測點的安裝和維護較困難,導致監測成本較高[10]。
1.2.3 近景攝影技術
將數字攝影技術應用于巷道圍巖表面位移的監測,形成了巷道圍巖位移近景攝影技術[11]。巷道圍巖位移近景攝影通過相機獲取待測巷道的影像,結合GPS 和全站儀,獲取監測點、攝像機及固定點的坐標,進而得到巷道圍巖表面位移的變化信息[12]。該方法精度與自動化程度較高,投入經費較大。
1.2.4 分布式光纖
巷道圍巖位移光纖監測是利用特征量的變化來判斷監測量的情況,常用分布式光纖進行巷道圍巖位移變形的監控測量。采用光纖進行巷道圍巖位移監測時需要投入較多的費用,并結合力學、通信技術等多學科進行監測預警[13]。
1.2.5 激光測距與掃描
激光測距的原理為發射器發射激光到達被測物體表面,接收器接收反射回的激光,由時間計數器測定激光發射與接收時間間隔,從而計算出發射裝置與被測物點的距離[14]。根據測量時間方式的不同,激光測距法可分為脈沖式和相位式。
2017 年,王運森等人[15]提出了一種巷道表面位移監測方法及系統。在保證監測方法簡單、監測數據可靠的前提下,采用激光測量原理建立巷道表面模型,綜合運用空間插值技術豐富采樣點數據信息,客戶端實現了監測數據變化趨勢的直觀動態顯示[16],該系統結構如圖 1 所示。
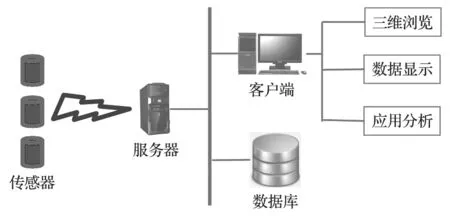
圖1 巷道表面位移監測系統結構示意Fig.1 Structural sketch of monitoring system for displacement of roadway surface
激光監測法可以進行全斷面巷道掃描,再現巷道位移變形情況。激光監測儀器價格較高,測量精度有待提高[17]。
1.2.6 多參數監測裝置
近年發展起來的一些多參數監測裝置,可實現圍巖內部的受力、變形、位移和離層物理量的實時監測[18],如圍巖失穩的聲光電集成監測裝置。集成監測裝置包括光學檢測孔、聲發射監測儀和鉆孔應力計,可進行 3 種監測信息的實時監測,經數據間的相互驗證,提高了巷道圍巖監測結果的準確性,能避免在復雜環境下監測信息失效等問題[19]。
1.2.7 多數據融合監測系統
隨著科學技術的發展,煤炭開采逐漸向自動化、智能化轉化,智慧礦山已成為煤炭資源開采的必然趨勢,多數據融合監測是巷道圍巖監測預警的發展方向[20]。2019 年,鄧弘哲等人[21]研發了一種巷道圍巖穩定性多功能一體化監測系統。該監測系統可監測巷道錨桿軸力、溫度、濕度、表面位移及 PM2.5 值,采用力+位移的綜合性方法進行巷道穩定性的預測預警。通過分析錨桿軸力、巷道表面位移變化趨勢,判斷錨桿支護是否失效、巷道位移是否過大,可預防安全事故的發生。
2 巷道圍巖深部位移監測現狀
巷道圍巖位移由表向里擴展,且在一定范圍內逐漸減小,內部位移與周邊位移具有明顯的相關性[22]。通過對巷道圍巖深部位移進行監測,可有效反映圍巖穩定性狀況,為支護結構設計提供基礎[23]。巷道圍巖深部位移指巷道頂板及兩幫內部變形,通過圍巖深部位移變化規律,可掌握巷道頂板、兩幫穩定性變化情況[24]。巷道圍巖深部位移主要監測儀器為多點位移計,通過在巷道圍巖內鉆孔布置測點,當圍巖運動時,可以通過測量測線鋼絲變化量獲得位移量[25-26]。
巷道圍巖離層量

式中:sn為測線外露變化量;n為測點編號;r1i,r2i,…,rni為多點位移計各測線長度;i為測量次數,取值為 1~m;Ln為rn+1~rn巖層段的位移量。
深部圍巖真實位移計算式為

式中:urn為rn處圍巖真實位移;u1為第1 次測量后巷道圍巖表面距中心值;um為第m次測量后巷道圍巖表面距中心值,正值為巖層向巷道內位移,負值為巖層向圍巖內位移。
計算出巷道圍巖深部真實位移后,可進一步計算出巷道圍巖深部任一點的徑向位移與周邊位移的比值,即圍巖深表比,

式中:λr為深表比;ur為距離巷道表面r處的巖體徑向位移;u0為巷道表面位移。
依據深部位移巷道圍巖穩定性預警時,當發生巷道圍巖大變形失穩時,則可取此位移量作為預報危險的臨界值。如在所監測巷道中無巷道圍巖失穩災害發生,也無經驗數據可供類比時,則可設一個位移值為預警值,該預警值可在后續觀測中逐步修正。如在監測過程中巷道位移量沒有達到預警值且圍巖保持穩定,則繼續使用該位移值作為預警值[27-28]。
2009 年,劉訓臣等人[29]為研究巷道錨桿支護結構穩定規律,采用深部巷道圍巖位移實時監測系統判斷頂板離層、錨桿支護情況。2019 年,黃燕波[30]采用巷道變形監測,掌握巷道深部圍巖變形規律,預測巷道圍巖變化趨勢及巷道圍巖位移范圍。
3 巷道位移監測趨勢及展望
回顧基于位移的巷道安全監測的大量實踐及研究成果,展望巷道位移監測預警的未來,其監測方法發展趨勢如下:
(1) 巷道位移監測逐漸由人工操作轉向自動化操作,位移監測方法在設備的造價、數據的精確度、地下采礦惡劣環境的適應性等方面有待改進。隨著數字化礦山的發展,位移監測成為巷道穩定性監測的重要手段。
(2) 巷道圍巖表面位移收斂計監測法的應用范圍和時間受環境條件限制,對于煤礦巷道圍巖穩定性方面的簡單觀測,仍具有一定的實用性。近年來,新型巷道圍巖位移收斂計已有較大改進,具備一些新功能,如電子顯示、半自動、智能化等。
(3) 采用水準儀和全站儀監測巷道圍巖位移是傳統測量方法,近年來,遙感技術已向定量化、自動化、實用化發展,近景攝影法有較大發展潛力。
(4) 巷道圍巖位移監測技術的重要發展方向為多數據綜合監測,即采用多種監測技術對巷道進行多參數監測,可得到多種監測數據。對于基于多數據的巷道圍巖監測技術,需要解決的問題是監測信息的融合分析與預警閾值的確定。
(5) 巷道圍巖內部的位移變化值較易獲取,對于不同工況下的圍巖失穩,其預警模式及預警值的確定仍需深入研究。
(6) 巷道圍巖位移監測數據處理分析將向著自動化、智能化、系統化、網絡化的方向發展。隨著多種自動化監測技術的應用,會更注重時空模型和時頻分析的研究,數字信號處理技術將會在基于位移的巷道安全監測方面得到進一步的應用。
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中華詩詞(2020年1期)2020-09-21 09:24:52
中華建設(2019年12期)2019-12-31 06:47:58
工程與建設(2019年3期)2019-10-10 01:40:18
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
江西建材(2018年4期)2018-04-10 12:37:22
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
電測與儀表(2016年9期)2016-04-12 00:29:52
江西煤炭科技(2015年1期)2015-11-07 03:06:32