礦山井塔攀爬防護助力裝置的研制與應用
2021-07-28 12:35:36陳孜虎
礦山機械 2021年7期
關鍵詞:助力
陳孜虎
中冶建工集團有限公司 重慶 400084
礦 山井塔[1]是豎井提升系統必不可少的設備。當采用豎井開拓方式時,特別是豎井較深時,一般都采用井塔的提升方式。井塔內頂部裝有提升輪、導向輪及其他機電設備,井塔設備的日常維護,是保障提升系統正常、安全運行的重要前提。由于空間限制,井塔設置的扶梯一般都十分陡峭,攀爬難度很大,設備維護人員通常需攜帶較重的工具,徒手攀爬陡峭的扶梯,攀爬過程中沒有額外防護,既消耗體力,又存在一定的安全風險。
針對高空設施維護人員攀爬梯架存在的安全風險,開發(fā)了一種攀爬防護助力裝置,既增加了作業(yè)人員的安全防護水平,又可以有效節(jié)省作業(yè)人員攀爬過程中的體力消耗,降低作業(yè)的勞動強度。
1 攀爬防護助力裝置
攀爬防護助力裝置[2]如圖 1 所示,在其傳動軸上設置檢測片,利用電磁感應的原理為速度開關提供脈沖信號。電氣控制回路中設置了繼電器,并設置延時時間,控制通電瞬間速度開關的吸合時長。接通電路后,電動機工作,帶動繩索移動,人員向上攀爬,可以為人員提供向上的拉力,通過繩索的牽引,起到保護防墜落的作用。若轉速小于設定值,速度開關傳感器則認為已發(fā)生卡死或堵轉,為了保障人員的安全,電路自動切斷;若轉速大于設定值,速度開關傳感器則判斷超速現象,此時電路自動切斷。人員通過安全帶與助爬裝置的吊鉤相連接,助爬裝置固定在攀爬目標位置的頂部,通過繩索牽引人員上行和下降。
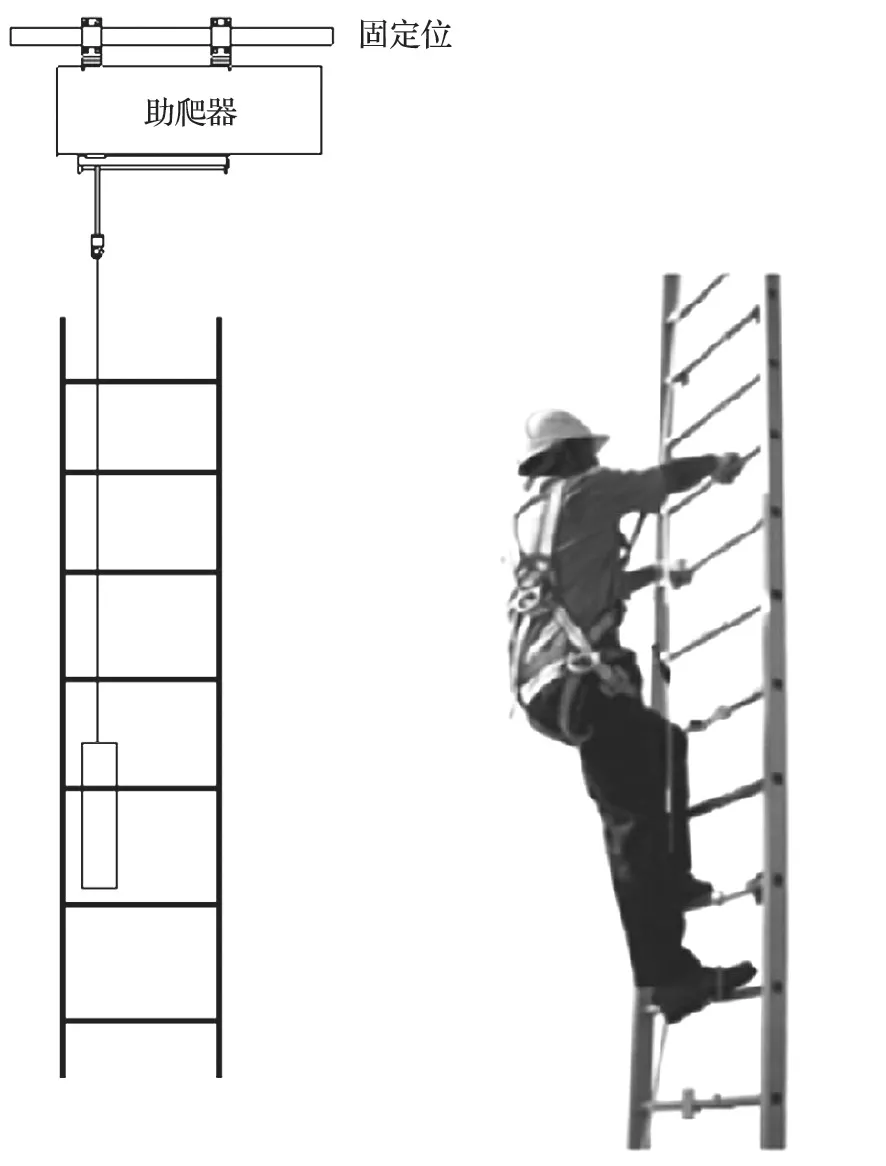
圖1 攀爬防護助力裝置Fig.1 Protective and assistant device for climbing
2 機械結構設計
攀爬防護助力裝置的主要功能是防墜落和助爬。其機械結構如圖 2 所示,主要包括驅動電動機、繩索卷筒、機械防墜裝置和電氣部件等。攀爬防護助力裝置可以幫助工作人員攀爬,減少因攀爬而產生的體力消耗,在節(jié)省人員體力的同時提高了安全性。其技術要求如下:根據使用者的體重實現 3 級助力可調。人員爬行速度一般為 0.6 m/s,驅動單元提供的轉速必須跟隨攀爬者攀爬的速度。
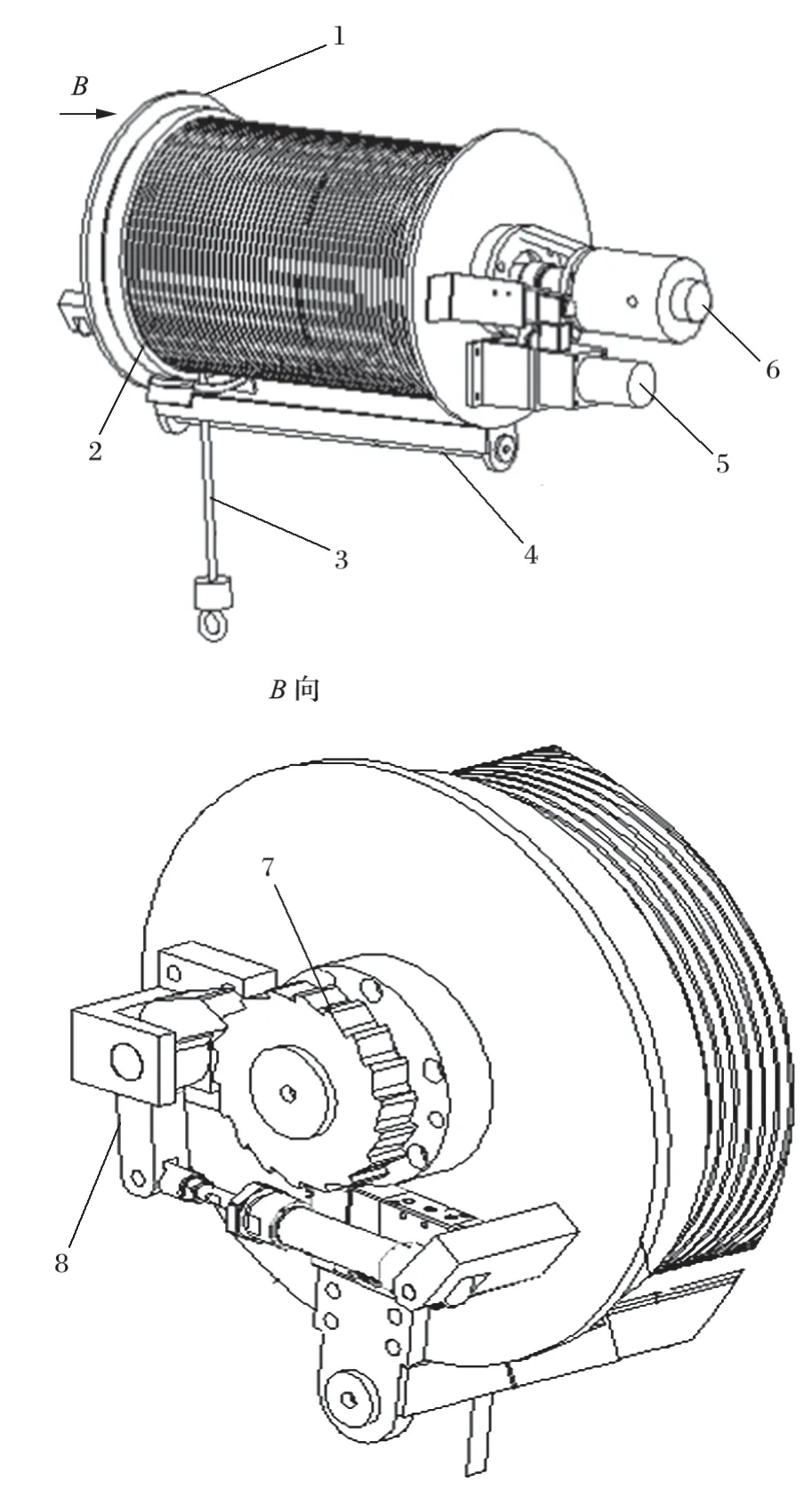
圖2 攀爬防護助力裝置裝置機械結構Fig.2 Mechanical structure of protective and assistant device for climbing
攀爬防護助力裝置內部結構如圖 2 所示。采用表面帶導向螺旋槽卷筒結構,可以有效減小卷筒尺寸,鋼絲繩沿著導向螺旋槽在卷筒上纏繞,確保鋼絲繩均勻纏繞;采用耐磨磷化涂層鋼絲繩,極大地提高鋼絲繩表面的耐磨性和耐蝕性,能夠有效地提高鋼絲繩的使用壽命,確保安全。
2.1 驅動單元選型
選用輪轂作為動力源,供電電壓為 220 V;卷筒外徑為 285 mm,提供 200~500 N 恒定向上的拉力,所需要最大轉矩

式中:F為拉力,N;R為卷筒的半徑,mm。
由經驗數據可知,攀爬速度取 0.6 m/s,卷筒的轉速

式中:S為每分鐘爬行距離,m/min;D為卷筒的外徑,m。將相關數據代入式 (2),即可得到卷筒的轉速n=40 r/min。
采用普通電動機,必須配置減速機構才能與所需的轉速相匹配。減速機構的作用是降低轉速、放大輸出轉矩。而滿盤電動機恰好可以大轉矩、低轉速運轉,無需減速機構。因此,選擇滿盤電動機作為驅動動力。
2.2 卷筒
鋼絲繩選擇 6×19S 系列,直徑為 6 mm,單位長度質量ρ=0.154 kg/m,橫斷面積S=14.3 mm2,最大懸垂高度Hc=110 m。鋼絲繩的選型公式為
式中:Q為提升載荷;δh為公稱抗拉強度,取 1 670 MPa;ma為安全系數,根據手冊取 6.5。
根據式 (3) 計算出最大提升載荷為 4 064 N,按照體重 85 kg 計算,遠大于人體體重,安全系數為4.78,故鋼絲繩滿足要求。
在提升高度較高時,采用表面帶導向螺旋槽或光面卷筒多層纏繞結構,以縮小卷筒尺寸。卷筒帶導向螺旋槽時,鋼絲繩的接觸穩(wěn)定性相對較好,既延長了鋼絲繩的使用壽命,又增加了鋼絲繩與卷筒的接觸面積。為了防止鋼絲繩脫出,在卷筒兩側設置擋邊。
2.3 鋼絲繩
鋼絲繩選用耐磨磷化涂層纖維芯鋼絲繩,抗拉強度為 1 570 MPa,根據 GB/T 24811 有關標準,選擇6×7 纖維芯鋼絲繩,鋼絲繩直徑為 5 mm,最小破斷拉力為 13.0 kN,安全系數取 4~8,則該鋼絲繩能夠承載 1 658~3 316 N,作業(yè)人員的體重一般小于 100 kg,顯然該鋼絲繩能夠滿足承載力。
2.4 電磁制動器
采用的磁粉制動器,主要由彈簧、摩擦片、端蓋、動片、調節(jié)螺絲、電磁鐵圓盤、線圈、軸及軸承等組成。該裝置電磁制動器將主動側轉矩傳遞給被動側,實現結合、切離或制動功能,具有結構簡單、響應速度快等優(yōu)點。電磁制動器可以使機械設備在短時間內停止運行,并具有鎖止功能,可在短時間內降低機械設備的運行速度。
2.5 機械防墜裝置
雖然電磁制動器在一定程度上能夠保障安全,但是為了防止電氣設備突然失效,必須具有安全防墜的功能。機械防墜裝置采用內嚙合棘輪制動機構,提供了雙重安全保障。
機械防墜裝置如圖 3 所示,主要由外輪、棘輪爪、內輪、制動連接機構和回位彈簧等構成。安裝槽內安裝有棘輪爪,棘輪爪與鉸軸鉸接在安裝槽內,棘輪爪能夠整體落入安裝槽中。回位彈簧一端固定在安裝槽的底部,另一端固定在棘輪爪上,安全狀態(tài)時,在回位彈簧的作用下棘輪爪不會張開;危險狀態(tài)時,在內輪旋轉所產生的離心力作用下,棘輪爪張開,張開后與安裝槽內的外側鋸齒槽抵接限位,此時外輪通過棘輪爪將內輪鎖止,從而實現機械防墜的功能。
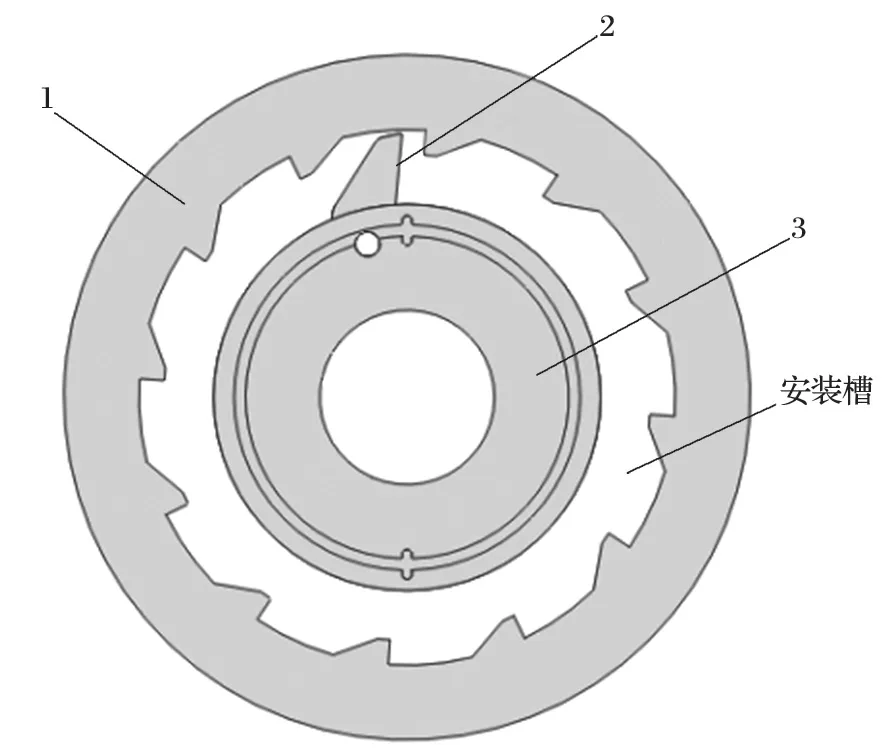
圖3 機械防墜裝置Fig.3 Mechanical anti-dropping device
2.6 外殼
攀爬防護助力裝置的外殼包括方便鋼絲繩有序卷入的排線導向機構、安裝制動器和電動機軸的固定板等機構,并具有防雨、防水、防塵的功能。
3 控制系統
攀爬防護助力裝置的電動機可提供恒定的轉矩,當向上攀爬時,電動機會提供向上的助力,人員可以順著直梯向上攀爬。驅動輪上裝有速度傳感器,工作時其控制電路接通,電動機以恒定的速度運行,能夠為攀爬人員提供恒定的拉力;需要在中途停止時,可以通過遙控器控制電動機停止運行,這時驅動輪停轉,整個電路斷開。下降時,電動機停轉,借助摩擦阻尼的作用,減緩下降速度,保證下降安全。
安全繩能夠與人的攀爬速度相匹配,機器提升速度與人同速上升和下降,人員向上攀爬時,提供向上的助力;下降時,提供向上的阻力;人員在攀爬失足時,防墜鎖止機構啟動,在很短的距離內鎖止,保證作業(yè)人員的安全。人員在中途休息時,在爬梯上靜置時間大于 5 s 時,電動機停止工作,不再提供向上的拉力。
在控制策略方面[3-5],采用接近開關作為信號接收元件,為控制判斷提供信號。在沒接收到信號時接近開關輸出低電平,接收到信號時輸出高電平,具體如下:PLC 記錄接收到接近開關信號的數量,當接收到最后一個信號之后 5 s 才做判斷,如果只接收到一個信號,則判定為誤操作,電動機不啟動;如果接收到 2~4 個信號時,判定為上升,電動機啟動正轉;如果接收到的信號數量大于 4 個時,為了避免將下行狀態(tài)判斷為上升狀態(tài)情況的發(fā)生,電動機不啟動。如果在上升過程中 5 s 內沒有接受到信號,則判定為停止攀爬,電動機停止工作。
為了裝置的控制便捷性,采用語音控制方案,進行了語音控制遙控器[6]的開發(fā),將語音控制器集成到遙控器上,并設置了保險,可防止操作人員誤操作。
4 試驗
4.1 功能性試驗
為了驗證攀爬防護助力裝置的技術性能,對其進行了測試試驗,具體如下:
(1) 遙控器操作裝置運行的準確性測試。
(2) 裝置在攀爬過程中能否實現速度匹配和恒定提升助力。
(3) 能否根據攀爬人員的動作進行牽引。
(4) 突然下墜時,裝置的鎖止制動距離。
測試分為 2 步進行,第1 步對裝置的各項基本功能與操作進行測試,驗證各功能能否滿足正常使用要求;第2 步,重復操作流程,對各項功能再一次測試是否正常。然后再進行關鍵技術性能參數的測試。
4.2 技術性能試驗
驗證攀爬防護助力裝置的關鍵技術性能指標主要有:提升助力值、提升最大速度、制動沖擊力和鎖止距離。
(1) 提升助力值測試 根據設計要求,助爬器能夠提供 200、300、400 N 提升助力值,分別對 3 擋助力值進行測試。具體方法是:在對應擋位下,用測力設備檢測裝置正常工作時提供助力的具體數值,多次測試取平均值,驗證實際提供的助力值與標定擋位的助力值是否在允許誤差范圍內。
(2) 提升最大速度測試 為了保證安全性,裝置運行的最大速度是關鍵技術指標。測試方法與提升加速度測試相似,用一個重量比選擇提升助力小的測試物體進行測試,將速度傳感器安裝在測試物體上,測試物體在提升過程中所能達到的最大速度,并且最大速度測試值是否在誤差允許的范圍內。每個助力擋位下進行多次測試,取平均值。實際測試的提升最大速度不應大于 0.6 m/s。
(3) 沖擊試驗 額定工作荷載 1 kN,啟動快速下降動作按鈕,最大速度制動后,測試受到的沖擊力。測試結果如表 1 所列。
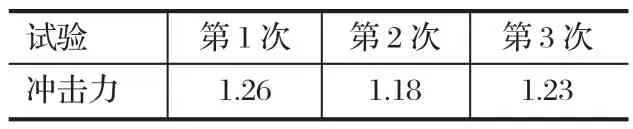
表1 沖擊力試驗數據Tab.1 Data of impact test kN
試驗結果表明,最大一次的沖擊力為 1.26 kN,根據人體耐沖擊性研究成果,該沖擊力不會對人體造成傷害。
(4) 鎖止距離試驗 額定工作荷載 1 kN,啟動快速下降動作按鈕,測試最大速度開始制動到完全停止的鎖止距離。測試結果如表 2 所列。
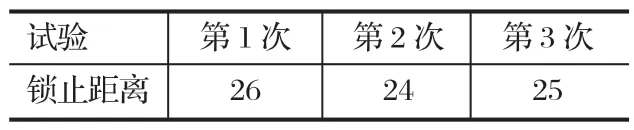
表2 鎖止距離試驗Tab.2 Test for halting distance cm
試驗結果表明,最大鎖止距離為 26 cm。根據人體耐沖擊性研究成果,該距離不會對人體造成傷害。
5 結語
測試結果表明,攀爬防護助力裝置性能穩(wěn)定、鎖止距離和沖擊力均滿足對人體安全防護的技術要求。通過對該裝置性能的測試,得到以下結論:
(1) 對鎖止距離、沖擊力等關鍵技術參數的測試結果表明,攀爬防護助力裝置具有良好的安全性能,能夠有效地起到安全防護作用。
(2) 滿盤電動機具有大功率、大轉矩的特點,不需要使用減速器就可以提供較大的提升力,實現了裝置小型化的設計目標。
猜你喜歡
中學生數理化·七年級數學人教版(2024年5期)2024-05-08 02:36:32
今日農業(yè)(2022年16期)2022-11-09 23:18:44
英語世界(2022年9期)2022-10-18 01:11:18
今日農業(yè)(2021年16期)2021-11-26 06:05:34
科學大眾(2021年9期)2021-07-16 07:02:40
海峽科技與產業(yè)(2021年1期)2021-05-22 01:27:00
中學生數理化(高中版.高考理化)(2021年2期)2021-03-19 08:52:46
金橋(2020年9期)2020-10-27 01:59:44
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
學苑創(chuàng)造·A版(2019年6期)2019-07-11 01:07:39