
基于小波域三重MRF分割算法的遙感圖像分割分析
2021-07-28 03:26:30張漢中
北京測繪 2021年7期
張漢中
(廣東省地質(zhì)局第七地質(zhì)大隊(duì), 廣東 惠州 516008)
0 引言
2006年規(guī)劃、2010年升空的高分衛(wèi)星系統(tǒng),可以實(shí)現(xiàn)亞米級的地面成像。且高分衛(wèi)星屬于可向民間提供全面宇航服務(wù)的民用衛(wèi)星項(xiàng)目,允許民營機(jī)構(gòu)隨時(shí)下載高分衛(wèi)星遙感圖像,并按需進(jìn)行分析[1]。但是,遙感圖像受到大氣條件(云層、霧霾等)、光照條件、曝光條件等影響,往往直接應(yīng)用的價(jià)值較低[2]。所以,對遙感圖像進(jìn)行分析,使其清晰度提升且在不同區(qū)域?qū)崿F(xiàn)圖像分割域的補(bǔ)拍和替換操作。遙感圖像的后期處理工作,主要分為圖像的分割標(biāo)記及曲線擬合分析[3]。
國內(nèi)有關(guān)該領(lǐng)域的研究較為少見,國外相關(guān)研究基本集中在衛(wèi)星圖像圖元分割和圖像處理兩個(gè)領(lǐng)域,其圖元分割算法主要集中在馬爾科夫隨機(jī)場模型(Markov Random Field,MRF)分割算法的變形,而圖像處理方面使用的模型眾多。本文計(jì)劃使用的小波域算法在國外相關(guān)研究中也有報(bào)道[4]。
MRF分割算法是在空間尺度對圖像進(jìn)行尋址分析的算法,通過仿真拍攝點(diǎn)的移動(dòng)速度矢量,對空間尺度下的遙感圖像進(jìn)行標(biāo)記和劃分,特別是運(yùn)動(dòng)網(wǎng)格區(qū)域與靜止網(wǎng)格區(qū)域間的相互作用比較微弱時(shí),可以使用MRF 模型進(jìn)行計(jì)算。小波域分析算法是一種基于低信噪比數(shù)據(jù)的抗干擾算法,通過小波域分析算法,可以讓數(shù)據(jù)中噪聲干擾得到有效壓制,在衛(wèi)星遙感圖像的分析任務(wù)中,小波域算法可以實(shí)現(xiàn)對各種干擾條件造成的圖像質(zhì)量擾動(dòng)的排除[5]。
本文擬使用三重MRF分割算法,屬于MRF算法的一種變形形式,擬使用的圖像處理算法為小波域圖像處理算法。
1 小波域三重MRF分割算法的數(shù)學(xué)原理
1.1 基于MRF分割算法的遙感圖像處理
構(gòu)建圖像的鄰域系統(tǒng),即在尺度為S×S的二維網(wǎng)格上定義一個(gè)L子集見式(1):
?={?(i,j):(i,j)∈S×S,?(k,l)?S×S}
(1)
式中,針對所有的(i,j)∈?(k,l)∪?(i,j)均滿足(i,j)??(i,j),且當(dāng)(k,l)∈?(i,j)時(shí),滿足(i,j)∈?(k,l)。即?(i,j)為二維網(wǎng)格S×S上的鄰域系統(tǒng)L,如圖1所示。
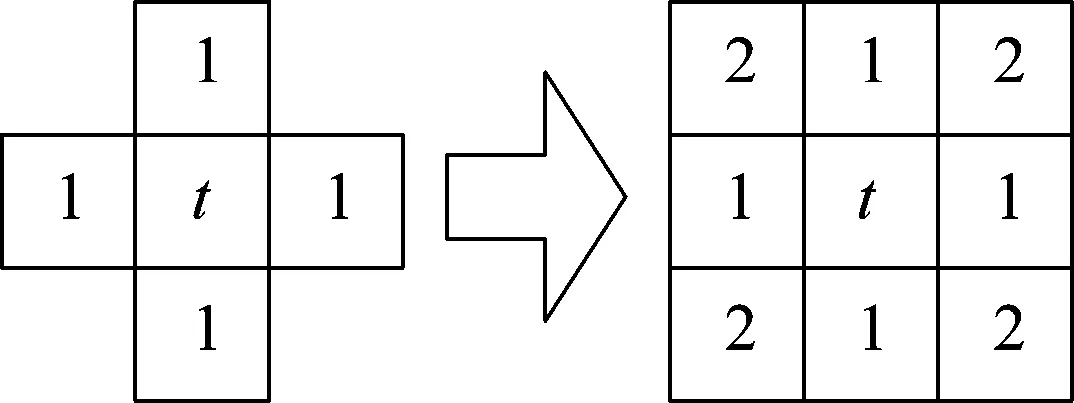
圖1 鄰域系統(tǒng)示意圖
圖1中,左圖是MRF的一階鄰域系統(tǒng),右圖為MRF的二階鄰域系統(tǒng)。t為前文所述的圖像集?(i,j)。
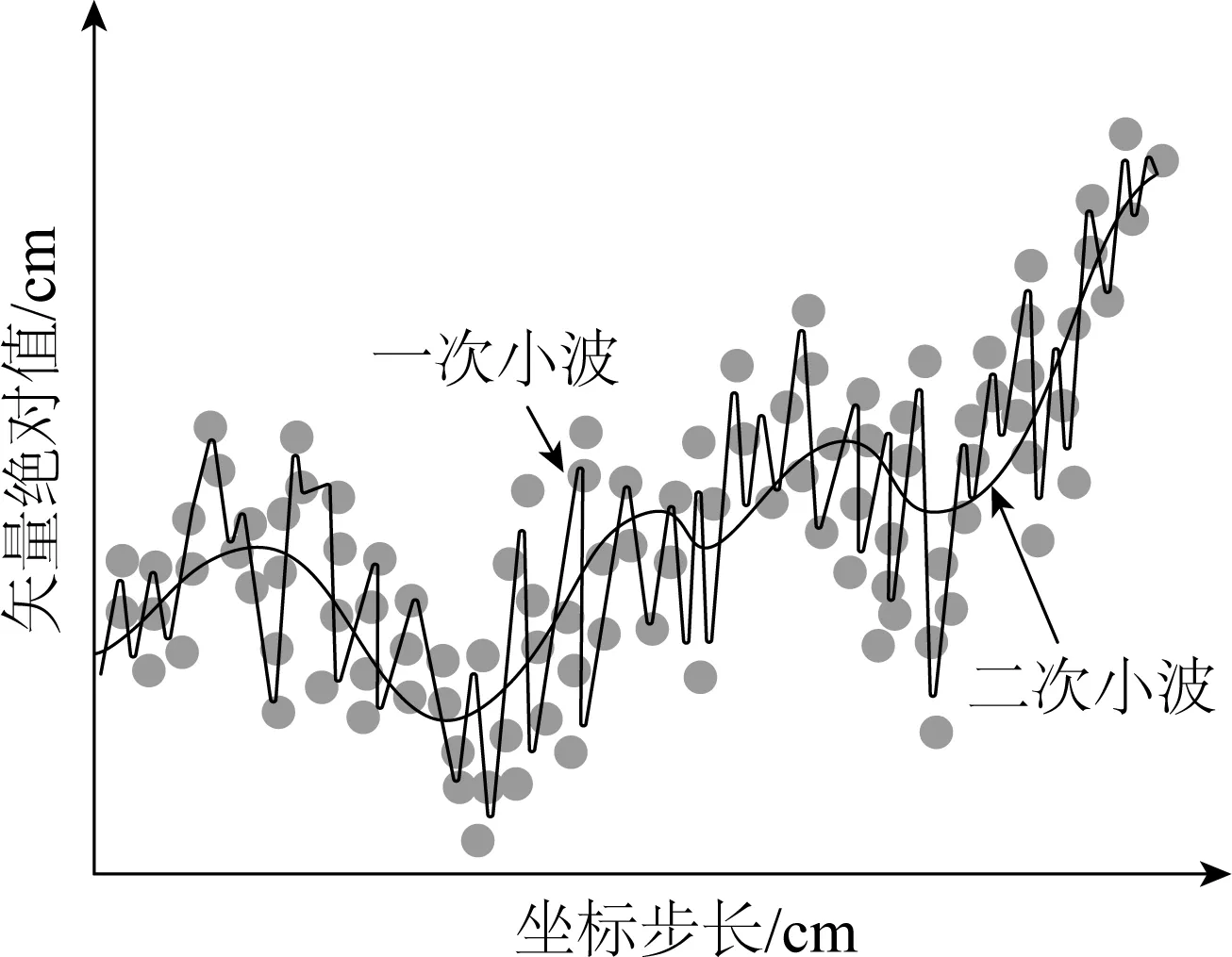
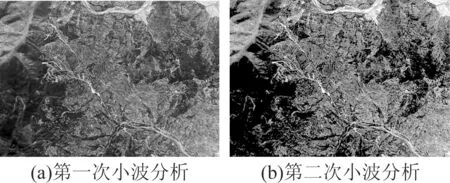
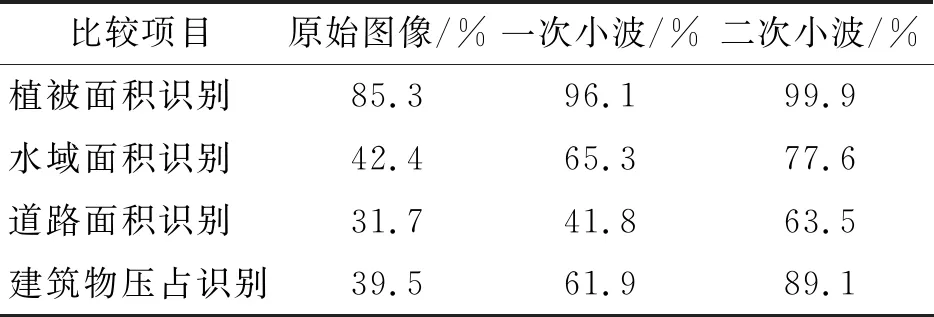
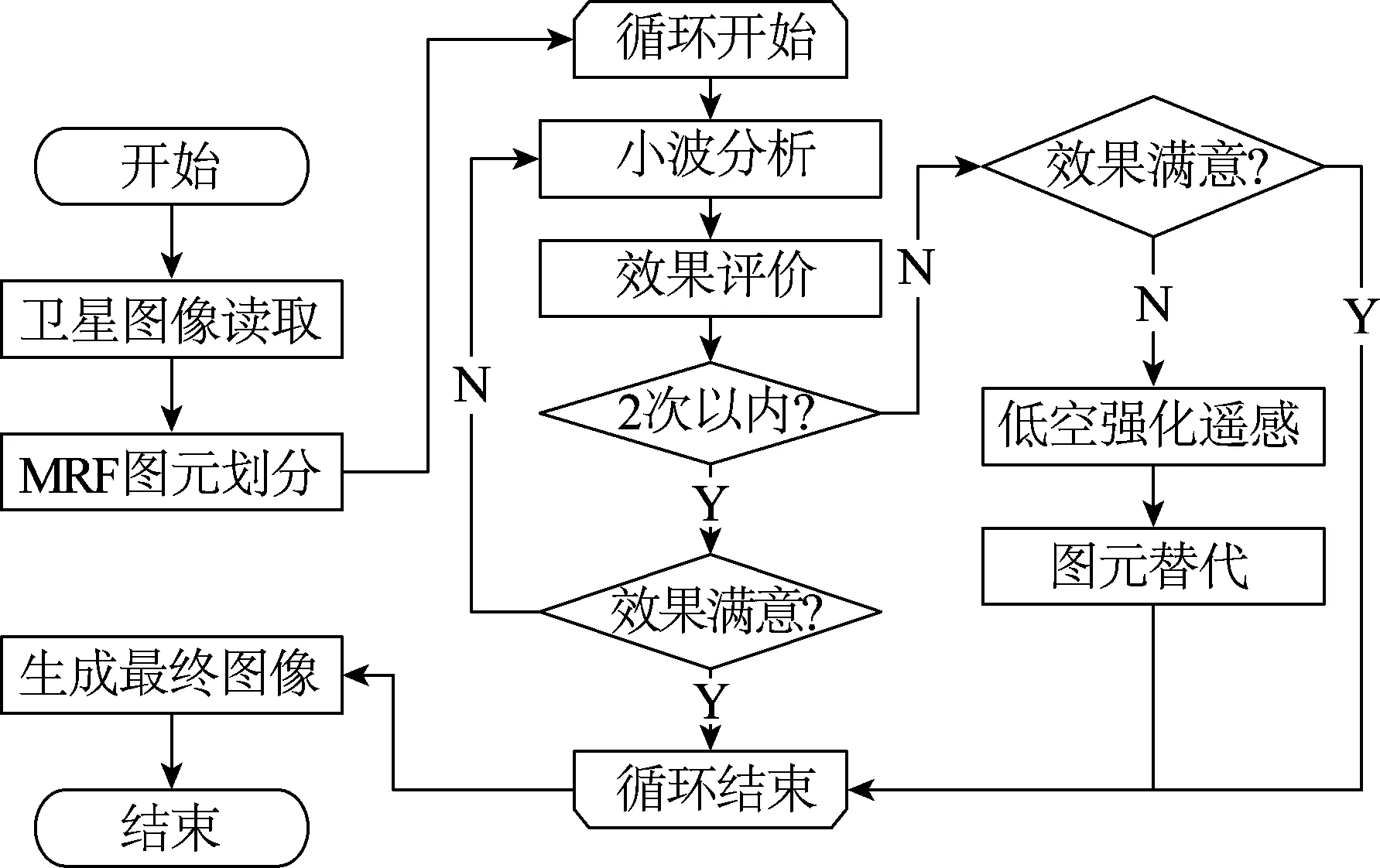
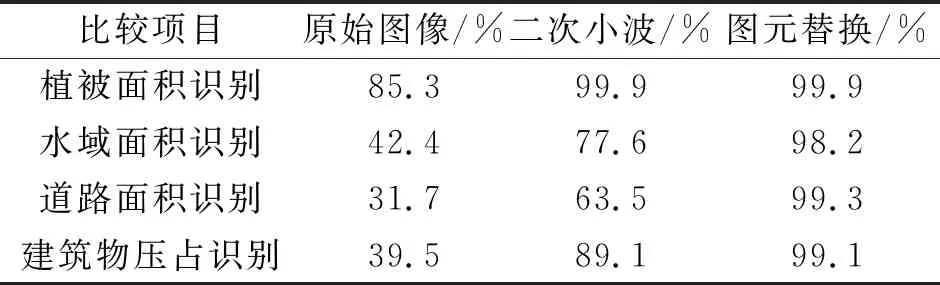
一階鄰域系統(tǒng)下,如果正整數(shù)集合n下,t0,t1,…,tn∈T,且t0 P{ε(tn)≤y|ε(tn-1)=xn-1,ε(tn-2)= xn-2,…,ε(t0)=x0}=P{ε(tn)≤ y|ε(tn-1)=xn-1} (2) 式中,當(dāng)P對所有的ε(tn)成立時(shí),則ε(t),t∈T為MRF的隨機(jī)過程。 在上述MRF隨機(jī)過程的基礎(chǔ)上構(gòu)建Ising模型,該模型假定在有限圖元上每個(gè)點(diǎn)僅有2個(gè)取值,那么在上述二維網(wǎng)格L的MRF隨機(jī)場X的空間狀態(tài)可以表示為K={-1,+1},一階鄰域系統(tǒng)下,構(gòu)建其Ising一元能量函數(shù)如公式(3)所示,二元能量函數(shù)如公式(4)所示: V1(xs1=k)=αk,k∈{-1,+1} (3) (4) 公式(3)及公式(4)中,xs1,xs2分別為像素位置s1及s2的標(biāo)號(hào)值,且滿足s2∈?(s1);αk,β為其一元能量賦值和二元能量賦值,其邏輯關(guān)系見式(5): (5) 式中,C屬于集合{0,1},即Vc根據(jù)數(shù)據(jù)狀態(tài)符合式(1)中V1表達(dá)方式或式(4)中V2表達(dá)方式;其他所有數(shù)學(xué)符號(hào)如之前公式。將賦能函數(shù)與隨機(jī)函數(shù)相結(jié)合,可以得到公式(6): (6) 式中,所有數(shù)學(xué)符號(hào)如之前公式。 綜上,MRF的本質(zhì)過程是在遙感時(shí)序圖像上進(jìn)行進(jìn)一步圖元?jiǎng)澐植⒗靡欢ㄒ?guī)則(本文采用Ising模型規(guī)則)進(jìn)行圖元賦值。經(jīng)過圖元賦值的MRF劃分圖元,即可進(jìn)行進(jìn)一步的圖像質(zhì)量分析和圖像質(zhì)量加強(qiáng)處理。 衛(wèi)星圖像雖然可以實(shí)現(xiàn)可見光條件下的亞米級分辨率,但其實(shí)際圖像受到可見光的限制,仍難以排除云層、霧霾、光影、大氣密度變化等對圖像質(zhì)量的干擾。此時(shí),對圖像質(zhì)量進(jìn)行分析,高保真需求下提取圖像特征,成為其圖元質(zhì)量加強(qiáng)算法的核心需求[6]。 與常規(guī)RGB(Red Green Blue Mode)函數(shù)不同,衛(wèi)星的可見光圖像一般采用多個(gè)高穿透性波長的圖像疊加,如400,680,750,2 500 nm等波長,而人眼的光錐細(xì)胞采集波長為490,570,630 nm。所以,衛(wèi)星圖像本身在可見光整合短紅外波長體系下獲得的相應(yīng)圖像與實(shí)際肉眼感知色彩之間存在一定的差異性。衛(wèi)星可見光圖像的采集波普顯著寬于肉眼視錐細(xì)胞采集波普[7-8]。后續(xù)處理中,將衛(wèi)星圖像的等波長灰度圖像針對人眼采集波長進(jìn)行等效投影,最終獲得衛(wèi)星圖像的顏色值,即衛(wèi)星圖像最終的像素存儲(chǔ)格式仍為RGB格式,即使用3個(gè)長整形變量存儲(chǔ)3個(gè)通道的灰度圖像,進(jìn)而使用RGB輸出模式進(jìn)行解釋輸出。 所以,對點(diǎn)陣的圖像按照各自通道提取后,形成可進(jìn)行小波域分析的圖元信息。其小波分析基函數(shù)見式(7): (7) 式中,p(y)屬于時(shí)域下的多項(xiàng)式系數(shù)控制函數(shù);m0(ω)屬于變換控制過程。其中p(y)的表達(dá)式可以寫作公式(8): (8) 式中,C為多項(xiàng)式系數(shù);k為控制變量;N為像素陣列總計(jì)數(shù)。 m0(ω)的表達(dá)式寫做公式(9): (9) 式中,-jkω為小波變換的傅里葉系數(shù);k為控制變量;N為像素陣列總計(jì)數(shù)。 經(jīng)過基于圖元域條件下的小波變換,可以得到圖元RGB參數(shù)下各通道信息的小波域優(yōu)化結(jié)果。 某山區(qū)規(guī)劃工作中,使用高分五號(hào)衛(wèi)星數(shù)據(jù)作為規(guī)劃測量參考數(shù)據(jù),規(guī)劃區(qū)東西長5 km,南北長3 km,規(guī)劃面積合計(jì)15 km2,規(guī)劃區(qū)內(nèi)最低海拔575 m,最高海拔1 394 m,區(qū)域內(nèi)河道眾多,山區(qū)植被覆蓋茂盛。該區(qū)域遙感圖霧氣影響較重,區(qū)域內(nèi)圖像對比度較低,山勢、河道水面、道路及相關(guān)植被和地表附屬物的細(xì)節(jié)展示不明顯[9]。所以,有必要使用上述小波域三重MRF分割算法進(jìn)行圖像信息加強(qiáng)處理。經(jīng)過MRF圖元提取后,對圖元信息進(jìn)行線性提取,并對其進(jìn)行特征函數(shù)提取,可以得到圖2結(jié)果。 圖2 特征函數(shù)提取結(jié)果示意圖 經(jīng)過一次小波域分析后,其趨勢特征仍不顯著,信噪比仍較低,但經(jīng)過二次小波分析后,圖像的函數(shù)特征得以較充分展現(xiàn)。其實(shí)際處理效果詳見圖3。 圖3 兩次小波分析后的效果比較圖 圖3(a)為第一次小波分析后的圖像結(jié)果,圖3(b)為第二次小波分析后的圖像效果。肉眼觀察下,圖3(b)的圖像解析度顯著優(yōu)于圖3(a)[10]。 參照上述個(gè)案中的實(shí)際圖像處理效果,使用小波域三重MRF分割算法,在對圖元進(jìn)行充分分割的前提下,使用小波域算法對圖強(qiáng)進(jìn)行充分加強(qiáng),可以在原始衛(wèi)星圖像資源中,實(shí)現(xiàn)對衛(wèi)星圖像信息的有效提取。對比原始圖像、一次小波分析、二次小波分析的實(shí)際機(jī)器讀圖識(shí)別率,可以得到以下對比結(jié)果,如表1所示。 表1 機(jī)器讀圖的識(shí)別率比較表(原始圖像) 可以看到,經(jīng)過本文設(shè)計(jì)的小波域三重MRF分割算法對衛(wèi)星圖像處理后,基于高分衛(wèi)星工具包提供的圖像信息識(shí)別比率,在植被、水域、道路、建筑物等方面均有顯著提升。特別是對植被的識(shí)別率已經(jīng)達(dá)到了99.9%,但對道路、水面等的識(shí)別效率仍有待于提升。分析其原因,主要來自在植被發(fā)育茂盛的本文個(gè)案區(qū)域,水域與道路等被喬木植被的遮擋效應(yīng)較為顯著,即便有效提升了圖像的解析度,該遮擋效果仍無法避免[11]。 MRF條件下,可以使用其他衛(wèi)星數(shù)據(jù)根據(jù)圖元標(biāo)記進(jìn)行替換,甚至可以使用飛機(jī)遙感數(shù)據(jù)和無人機(jī)超低空數(shù)據(jù)進(jìn)行圖元替換。其工作流如圖4所示。 注:N表示否;Y表示是。 圖4中,超過二次小波分析仍不能達(dá)到圖像識(shí)別率的,進(jìn)行低空強(qiáng)化遙感拍攝,并根據(jù)低空強(qiáng)化遙感的MRF圖元分割結(jié)果,與衛(wèi)星圖像的MRF圖元進(jìn)行替換合并,以實(shí)現(xiàn)更高的圖像識(shí)別率。經(jīng)過低空強(qiáng)化遙感后的數(shù)據(jù)識(shí)別率,詳見表2。 表2 機(jī)器讀圖的識(shí)別率比較表(圖元替換) 表2中,使用無人機(jī)超低空遙感后,將其MRF分割圖元域衛(wèi)星圖像的MRF低質(zhì)量圖元進(jìn)行替換,從而再次使用工作流進(jìn)行數(shù)據(jù)分析,最終交由高分衛(wèi)星工具包軟件進(jìn)行圖像識(shí)別,發(fā)現(xiàn)經(jīng)過圖元替換的識(shí)別率,除水域識(shí)別為98.2%略小于99%外,其他識(shí)別項(xiàng)目(植被、道路、建筑物)的識(shí)別率均達(dá)到了99%以上。可見該分析模型不僅對既得衛(wèi)星圖像的分析有積極意義,對衛(wèi)星遙感與其他遙感方式的整合過程,也有顯著的工程實(shí)踐意義。 該模型的核心創(chuàng)新點(diǎn)在于,將衛(wèi)星遙感圖像的圖元?jiǎng)澐诌M(jìn)行充分精細(xì)化,使衛(wèi)星遙感圖像可以劃分成獨(dú)立且不相交的圖元并對其進(jìn)行逐一操作,且可以通過小波域圖像分析法,對圖像特征進(jìn)行有效提取,并對提取的圖像特征進(jìn)行充分強(qiáng)化。在無法達(dá)到圖像特征強(qiáng)化需求的圖元中,使用低空強(qiáng)化遙感的方式,對其進(jìn)行補(bǔ)充測量。當(dāng)前技術(shù)條件下,衛(wèi)星遙感、航拍遙感、無人機(jī)攝影遙感等可以在MRF圖元序列下進(jìn)行有效整合。即航空航天技術(shù)在對規(guī)劃測量、工程測量、施工測量、驗(yàn)收測量的全工程周期測量工作中,可以在MRF模型的支持下,實(shí)現(xiàn)無縫整合。MRF模型不僅對圖像的劃分過程實(shí)現(xiàn)無縫拼接,也可以在測量流程管理領(lǐng)域?qū)崿F(xiàn)流程的無縫拼接。1.2 基于小波域分析的圖元質(zhì)量加強(qiáng)算法
2 個(gè)案條件下的模型應(yīng)用及效果分析
2.1 個(gè)案基本情況
2.2 小波域三重MRF分割算法在個(gè)案中的意義
3 結(jié)束語
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06
