基于人工智能船舶發電機的故障檢測與維修研究
2021-07-28 02:40:06吳澤謀
設備管理與維修 2021年12期
吳澤謀
(集美大學,福建廈門 361021)
0 引言
船用發電機組是船舶的重要組成部分,船用發電機是核心,發電機能否正常工作,關系到船舶能否正常航行[1]。若船舶臨時停電,主機無法保證潤滑,副泵無法工作,船艙及照明不能正常,某些導航設備甚至會完全失控[2]。所以隨時監測發電機運行具有重要意義。常規的故障檢測方法從故障到停電的時間都很短,所以值班人員必須在短時間內掌握報警的實質。但是,由于受現場環境和人為因素的影響,有時很難判斷出故障部件,從而導致誤判。發電機故障的在線實時監測和故障診斷需要有一套優秀的人工智能手段[3]。針對船舶發電機的勵磁三相整流電路故障,提出了基于波形分析的神經網絡診斷方法。該方法先采集整流電路的輸出波形,然后建立神經網絡輸出與故障的對應關系,實現智能故障診斷。
1 船舶發電機轉子匝間短路故障檢測與維修
發電機運行過程中,轉子匝間短路的故障診斷主要是根據轉子勵磁電流的變化和匝間短路引起的轉子熱、磁不平衡來進行的。電機轉子匝間短路在運行中常見的兩個特點:①轉子振動異常;②激發電流相對增大。針對上述特點,可以分析正常運行的機組在運行中是否發生匝間短路故障[4]。系統匯集了維修領域眾多專家的知識與經驗,以實際應用為出發點,針對汽車電噴發動機故障診斷日益復雜的特點,模擬電噴發動機故障專家診斷過程。結合故障樹數據結構和關系數據庫原理,構建了一個較完整的知識庫,實現了確定性故障診斷所需的推理引擎;利用Visual C++和Access 2000作為EFI 發動機故障診斷專家系統,其主要功能實現如下:故障碼診斷功能;故障現象診斷功能;傳感器診斷功能;波形分析診斷功能;記錄的維護查詢、添加、修改、刪除功能;經驗診斷功能。
1.1 發電機轉子匝間短路故障特征提取
船用發電機轉子檢測線圈感應電勢分析主要用于判斷轉子是否匝間短路,隱極型32 槽轉子是主要研究對象。轉子的工作狀態主要有3 種:正常工作狀態,10%匝間短路,20%匝間短路。當轉子運行時,安裝在定子與轉子之間的檢測線圈將產生感應電動勢,其大小將受到轉子漏磁的影響[5]。在短路的情況下,轉子繞組匝數減小,感應電動勢也隨之改變,通過繞組感應電動勢的變化判斷轉子是否匝間短路。針對電感電動勢變化前后信號頻率會發生變化的特點,利用小波頻帶能量分析方法,提取電感電動勢變化前后信號頻帶能量,作為故障診斷的特征值。利用小波變換所得的系數可獲得頻帶能量,步驟如下:
(1)利用三層小波包對感應電動勢信號進行分解,得到8 個頻段的第三層。假定原信號最低頻率為0,最高頻率為f,在小波包分解后,每一層的頻率范圍為3。
(2)在第三層,通過信號分解,實現低頻到高頻的單支重構,分別提取重構后各頻段的能量。
(3)對提取的能量進行歸一化,提取了艦船發電機轉子在正常和故障情況下的故障特征值。
1.2 發電機轉子故障識別
采用人工智能技術識別發電機轉子故障,主要步驟如下:
(1)采用小波包分解后得到的各頻段的能量特征值作為人工智能的輸入,通常采用10%匝間短路和20%匝間短路作為發電機轉子的預期輸出。
(2)按照艦船發電機故障診斷的設計原則,確定了8 個輸入層神經元和2 個輸出層神經元和2 個隱含層神經元的數目。
(3)在不同的運行條件下,分析正常運行狀態模擬波形數據和各發電機故障模擬波形數據,將它們作為.lvm 類型文件退出Matlab,并按照“運行conditions-operating 狀態模擬數據”格式命名為“錯誤組件故障mode-normal”。取得所有情況下的波形數據文件,儲存在"generator all data"文件夾中,提供給發電機故障模擬平臺。這個過程顯示在圖1 中。

圖1 發電機數據存儲流程
第一步,選擇工況輸入、運行狀態輸入、故障元件輸入和故障模式輸入;把4 個條件結合起來獲得結合的輸入。船舶上通常配備3 臺同容量的主發電機,另外一臺應急發電機,因此在相同的運行條件下,3 個發電機的運行狀態可能不同,因此可在“組合方式”表中查找到組合方式,判定組合模式是否存在,組合模式是否正確。若混合模式不正確,則需要重新選擇混合模式中的每個輸入量,直到找到正確的混合輸入模式為止。
1.3 故障維修
(1)孔外檢驗在現場加工中比較常用。技術人員分析轉子可能出現的動態多點匝間短路,確定是否在孔外檢測轉子。技術員用內窺鏡檢查旋翼的形狀,如未發現更明顯的故障點,則需配合雙極性電壓平衡試驗和線圈分布電壓試驗,進一步檢測回廠后的處理效果,送往生產廠家加工的設備更要保證在轉子轉動之間發生短路后,通常需要拆除保護環、線圈等。為此,建議對轉子送廠進行全面檢修,以確保機組經過初步現場處理后能正常、高效、長期、穩定地運行。
(2)返廠加工主要是檢查轉子的起卷情況,在勵磁正極和負極線圈位置不同的情況下,進行匝間短路點的定位與處理。盡管返回過程需要大量時間,維護成本增加了,但是返工的效率提高了。現場處理后,可初步判定轉子為多點動態匝間短路,推薦轉子直接回廠加工。
(3)一旦發現問題,及時與生產廠家溝通,盡量縮短返工時間,盡量選擇技術實力強的產品,有經驗的現場加工技術人員對設備的搶修及后期返工有很大的指導作用。對縮短維修周期、減少經濟損失也起著重要作用。
2 船舶發電機激磁電流故障檢測與維修
無刷同步交流發電機狀態監測是通過各種傳感器對發電機運動時所產生信號的檢測,精準抓住各種可能出現故障的信號特征,這是船舶發電機激磁電流故障檢測與維修關鍵所在。因此,需先檢測船舶發電機激磁電流故障,再進行故障維修。
2.1 船舶發電機激磁電流故障檢測
船舶發電機勵磁電流,取二繞組四繞組相復勵磁變壓器的三相交流電壓,用硅整流得到,發電機勵磁電流電路如圖2 所示。
通過三層BP 神經網絡將故障類型和故障元件代碼與神經網絡輸出相對應。圖2 整流器輸出電壓Ud波形的實時采樣及數據處理,以圖2 中的神經網絡學習樣本為例,建立了輸入信息和故障元件編碼的一致性,實現了整流裝置的智能判斷。BP 神經網絡是神經網絡中的反傳算法。首層為輸入層,接收以Xi(i=1,2,…,n)表示的外部信息;中間為隱藏層;第三層是輸出層,采用Yk表示,神經網絡的輸出采用6 位二進制碼。將所需模式識別的輸入節點,通過網絡轉發給每一個隱層節點,通過隱層節點的激活函數,將其傳遞給輸出節點,產生誤差信號,采用梯度下降法,對誤差信號進行分層,調整權值和閾值,然后再傳回輸入層。重復循環的前傳和后傳,直到誤差達到精度要求。若神經網絡的輸出為“1”,其余元件為“0”,則表明第三個二極管有故障,而其他的沒有。若神經網絡同時具有“1”和“0”的輸出,則5,6 個二極管同時失效。通過這種方式,值班員或維護人員還可以根據輸出“0”和“1”使用聲光報警來判斷故障或故障點。
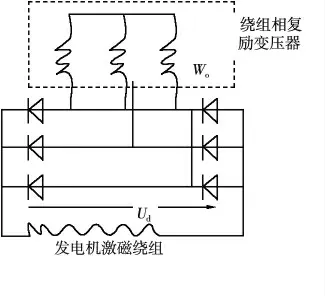
圖2 發電機勵磁電流電路
2.2 故障維修
由于傳統船舶發電機故障檢測沒有電流檢測環節,因此,可加入電流內環控制實現對電流無差控制,用于實現船舶發電機激磁電流控制。在此基礎上,結合日常運行維護經驗,針對無刷同步交流發電機電流不平衡問題,采取了如下措施:
通過對上述電路分析,忽略支路電容問題,則正序電壓、電流數值可用于正序電路計算。為消除負序電流,將正序電流作為輸出電流參考值,忽略整流器調制過程中所產生的諧波問題。即假設整流器三相電壓給出的三相電壓參考指令與控制預計方案基本一致,則可獲取電流參考指令表達式。由于電壓外環存在閉環控制,因此,需通過調節參考信號實現有功和無功功率設定,即使參考指令中的負序電流項被消除,也可通過參考信號調節,保證設定電壓與預期電壓指令一致。
實時了解電路動態特性,分析電壓、電流穩態關系,雖然電流指令計算與電路參數存在一定關系,但由于有功和無功控制中存在積分環節,因此,需將并網功率輸出數值與設定數值保持相同。當三相電壓平衡時,整流器穩定狀態下傳遞函數為定值,因此不起作用,此時應計算出電流參考指令,即為電流實際值,因此,電壓參考值經過電流參考指令模塊和內環控制后保持不變。當電流不平衡時,負序電流抑制不起作用,因此,無需故障檢測,也無需控制模式切換,由此完成船舶發電機激磁電流故障維修。
3 結束語
船舶發電機是船舶動力系統的核心。如果出現故障,將嚴重影響船舶的正常航行,甚至危及船員的生命安全。所以對船舶發電機進行故障診斷是非常必要的。今后的工作是建立一套硬件采集系統,采集真實的船舶發電機運行數據,取代故障模擬平臺。船舶發電機故障診斷可以從電力擴展到機械方向,采用電氣和機械相結合的方法。在實際工作環境下,對診斷平臺進行實際測試的可行性,構建多診斷系統共享分析結果的網絡系統。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
電力工程技術(2014年1期)2014-03-20 14:19:06
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31
河南科技(2014年3期)2014-02-27 14:05:48
