煤礦帶式輸送機智能調速控制系統的應用研究
2021-07-28 05:45:02張帆
機械管理開發 2021年6期
關鍵詞:智能
張 帆
(山西省太原市萬柏林區西山高級技工學校,山西 太原 030053)
引言
帶式輸送機作為煤炭物料裝載運輸的關鍵設備,經過幾十年的發展,在煤炭物料運輸方面起到了重要的作用。在智能化發展時代,有必要在帶式輸送機智能控制方面取得進步。通過智能化技術的作用,降低帶式輸送機的運行能耗,同時使得帶式輸送機的皮帶運行速度能夠在經濟運輸的合理區間內,使速度與煤炭裝載量達到平衡狀態。目前,帶式輸送機等大型設備在開采過程中總耗電量最高可占到80%[1-2],在降低電能消耗方面有較大的進步空間。通過對帶式輸送機在滿載、輕載、空載三個不同裝載狀態下的能源損耗問題進行研究,使皮帶的轉動速度能夠在不同裝載條件下保持在合理的速度區間內。通過帶式輸送機的智能調速系統對速度實現實時的調節,使帶式輸送機達到綠色節能減排的目的。研究成果為煤礦企業對于綠色節能技術的研發提供了依據。
1 帶式輸送機結構
常規的礦井帶式輸送機主要由機架、皮帶、驅動裝置、托輥等部件組成。以常用的DTL180/4-2240型帶式輸送機為研究對象,該型號輸送機能夠實現超長距離和大功率的裝載輸送,并且采用的是雙滾筒結合三個電機驅動的先進帶式輸送機[3]。在工程應用中能夠很好地適應礦井內惡劣的工作環境,并且可拓展性和移動性較好,能夠根據工作面的轉移展現出高性能的機動性,整體結構示意圖如圖1所示。
2 帶式輸送機運行阻力分析
帶式輸送機在運行的過程中,電機的輸出動力和運行所受到的阻力形成了一對相互作用體系。由于帶式輸送機的零部件較多,各個零部件之間都有可能在運行過程中產生相反作用力的特殊阻力。DTL180/4-2240型帶式輸送機主要阻力包括物料加速產生的阻力、滾筒阻力、清掃器阻力、皮帶壓陷阻力、物料彎曲阻力等主要的主力類型。在不同的運行狀態下,所產生的阻力類型各不相同。同時,產生阻力的摩擦系數會根據設備的運行狀態而發生變化。通常帶式輸送機處于良好工況狀態時,摩擦系數最小。隨著開采過程的深入,摩擦系數將逐漸增大,影響到了電機的輸出功率。因此可通過減小阻力的方式來實現降低能耗的作用,在設計智能調速控制系統時也將該優勢考慮在內。
3 智能控制方法的研究
3.1 煤流量監測設計
為了實現煤流量與皮帶運轉速度相統一,設計出精確的測量工具是關鍵。在帶式輸送機的底部安裝電子皮帶秤,通過A/D數據轉換,以發射γ射線的方式對皮帶上的煤炭在單位內的重量進行精確測算[4]。測量出的煤炭重量數據通過積算器被發射至PLC進行核心處理,并且能夠在后臺的顯示器上輸出關鍵的參數信息。
3.2 皮帶速度與煤流量匹配分析
由于礦井開采機械產生的煤炭物料質量不會始終保持統一的穩定狀態。但是輸送機的運煤量會出現輕載、重載等交替運輸情況。智能調速系統是為了更好地將皮帶速度與煤流量進行匹配,達到最優的平衡輸送關系。通常來說,當煤炭的運載量提高時,皮帶的轉速就越快,反之就越慢,煤流量與帶速、功率的關系示意圖如圖2所示,其中Q為煤流量、V為帶速、P為功率。由此可以看出煤流量和帶速對輸送機的功率影響較大,當帶速保持恒定的時候,不利于充分輸出電機功率。

圖2 煤流量、帶速、功率之間的相互關系
3.3 電機功率平衡策略分析
影響到帶式輸送機驅動電機功率的因素很多,不僅包括機械本身的因素,也關系到人為因素的影響。主要是由于在生產或安裝過程中所造成的差異性機械特性,可從多個電機功率驅動在不平衡狀態下的機械特性作為研究突破口,結合帶速與煤流量的線性比例關系,提出功率平衡的策略。
帶式輸送機運行能力來源主要通過電流輸入的電能,因此以電流作為控制策略的核心依據。電流實現電機功率平衡的策略主要包括均值、差值、分組、組從等4種控制方案[5]。由于帶式輸送機通常采用多臺電機聯合驅動,因此電流的主從控制方案更適合作為智能調速方案的形式。通過對帶式輸送機速度PI、壓力PI的控制,實現了主從控制電機的相互獨立,互不產生干擾影響,但是當主電機的電流信號發生變化時,各從屬電機電流數值也會產生同比例的增長和減小,具體控制流程圖如圖3所示。
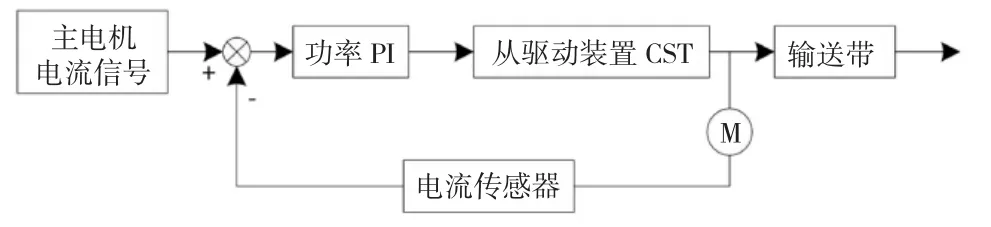
圖3 主從控制方案原理示意圖
4 智能調速控制方案的設計
4.1 整體結構設計
DTL180/4-2240型帶式輸送機的智能調速控制系統主要由上位機、PLC、傳感器、變頻器等重要電器部件組成。通過PROFIBUS通信協議實現整體系統的全域通訊[6],由PLC發送控制命令,將采集到的數據通過調度室自動反饋模塊判斷識別后傳輸至上位機系統,帶式輸送機在礦井內的狀態將得到實時監控,如圖4所示。

圖4 智能調速控制系統結構示意圖
4.2 硬件選型設計
采用西門子S7-400型PLC為核心組建的輸送機系統。S7-400系列PLC的電源模板通過背板總線向機架上其他模塊提供工作電壓,但是不給信號模塊提供負載電壓。CPU417-4上集成了MPI和PROFIBUS DP接口。其中,PROFIBUS DP接口可連接分布式I/O,最多可連接32個DP從站。同時根據井上、井下、檢修、復位等工序分配I/O地址,采用計數器模塊、溫度控制器模塊、位置解碼器模塊、凸輪控制器模塊等實現變頻控制。將測試皮帶速度的傳感器設置為4個擋位,每個擋位測量的限度值分別為1.7 m/s、2.0 m/s、2.5 m/s、3.5 m/s,工作電壓為DC 12~24 V、工作電流為5 mA。最后將傳感器布置到帶式輸送機合理的檢測位置上,實現PLC控制器的集中處理,達到數據采集的功能效果。
4.3 軟件設計
通過IFIX組態軟件編譯,完成帶式輸送機智能調速監控系統的軟件界面設計。其中,通過I/O模塊設計實現井下實時數據采集的功能,并通過生產過程界面可視化、實時監控、預警等模塊實現數據管理的功能。系統管理包括權限管理和人員管理。監控界面操作是將各帶式輸送機的運行狀態顯示在界面上,方便工作人員進行簡單的操作以及對突發情況采取及時的應對措施。同時皮帶的運轉速度也將根據皮帶單位質量內的煤炭運輸質量而發生同步的調節,各項關鍵數據在監控系統界面實現了清晰明了的呈現,如下頁圖5所示。

圖5 DTL180/4-2240型帶式輸送機設備監控界面
5 結語
本文研究智能調速控制系統,實現了帶式輸送機皮帶速度與煤炭運輸質量相匹配的調節平衡功能,最大化地發揮出了帶式輸送機電機驅動的功率,提高了運輸效率并且實現了帶式輸送機的綠色節能減排。同時,將帶式輸送機的關鍵運行參數實現了統一的監測反饋,提升了礦井智能化安全化的管理水平。
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學科學(學生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44
