一種分布式組網雷達的航跡融合二次處理方法
2021-07-28 01:40:50施裕升王曉科蔡紅豪邵子琪
航天控制 2021年6期
施裕升 王曉科 蔡紅豪 邵子琪
1. 上海機電工程研究所,上海 201109 2. 上海航天技術研究院,上海 201109 3. 上海航天電子技術研究所,上海 201109
0 引言
隨著信息技術的高速發展,現代戰場環境日益復雜,僅僅依賴單部雷達存在可靠性低,容易被敵方干擾等缺點,無法滿足作戰需求[1-2]。因此,迫切需要采用多部雷達組網協同探測并融合航跡,從而獲得高質量的目標信息,協助指揮中心實時、準確地做出作戰決策[3],彌補單一傳感器的不足。但由于不同傳感器存在不同的測量誤差、目標運動特性多變等原因,使得融合的不確定因素增加,導致融合航跡的準確性與穩定性較差。因此,如何提高融合航跡的準確性與穩定性,獲得高質量的目標信息成為當前亟待解決的問題。
當前國內外大部分學者提高融合航跡的準確性與穩定性的關注重心是兩個方向,依次為獲得更精確的局部航跡估計和改進融合算法。在局部航跡估計方向,文獻[4]構建基于勻速轉彎的虛擬量測卡爾曼濾波器,提高估計精度。文獻[5]構建標記多伯努利濾波器實現有限視場的航跡融合。文獻[6]采用交互式多模型結合擴展卡爾曼濾波得到局部航跡估計,采取簡單平均融合形成系統航跡。文獻[7]采用無跡卡爾曼濾波獲取局部航跡估計,采取協方差加權融合形成系統航跡。但以上研究側重于局部航跡估計,對融合算法的研究較少;在融合算法方向,目前大部分算法都是基于加權融合的思想,不同的是權值的選取標準與分配。文獻[8]以協方差估計為權值實現加權融合。文獻[9]也是以協方差估計為權值,但針對海上目標進行了改進,即動態分配權值實現加權融合。文獻[10]估計傳感器的量測精度并作為權值,根據動靜精度分配權值。文獻[11]以航跡質量為權值,實時調整權值大小。但大部分算法關注融合前的權值分配,針對變化性較大的實測數據可能導致權值分配不合理的問題。反觀目前現狀發現,各學者對融合后的最終結果分析較少,為解決此類問題,可以換個角度思考,避免在融合前采用各種算法優化權值,卻發現最終結果不理想的問題。另外,智能化融合算法也展開了大量研究。文獻[12]提出一種基于卷積神經網絡的航跡融合算法,文獻[13]基于模糊邏輯理論融合航跡。但智能化融合算法對于目標的先驗知識要求高,在線學習不利于工程應用。
本文從融合后處理的角度出發,結合工程性對局部航跡估計和融合算法依次展開研究。在局部航跡估計方面,改進Sage-Husa濾波算法并與卡爾曼濾波相結合,提高卡爾曼濾波的魯棒性,獲得準確的局部航跡估計;在融合算法方面,與以往對融合前的航跡處理不同,本文主要關注融合后的航跡處理。采用簡單凸組合融合局部航跡的估計,并基于抽樣檢測思想與航跡平滑度自適應,采用實時小波變換平滑融合后的航跡,進一步提高系統航跡的準確性與穩定性。
1 基于自適應卡爾曼濾波的局部航跡估計
在實際環境中,沒有先驗噪聲作為支撐,在實際工況下,傳感器觀測噪聲也會發生變化,導致卡爾曼濾波性能降低。因此本文引入Sage-Husa濾波算法提升卡爾曼濾波的自適應能力,該算法能夠自適應估計和修正噪聲的統計特性,但也存在計算量大,魯棒性差的缺點,需對其進行改進。
1.1 基本的Sage-Husa濾波算法
Sage-Husa濾波算法的核心是實時運用量測更新的數據,在系統和量測噪聲都未知的情況下進行動態的統計估算。記卡爾曼濾波中的新息為:
ε(k)=Z(k)-HX(k|k-1)
(1)
Sage-Husa濾波的估計系統噪聲和量測噪聲的主要公式如下:

(2)
式中的dk=(1-b)/(1-bk+1),其中b為遺忘因子,取值為常數。從式(2)可以看出Sage-Husa濾波算法在每次迭代中都要進行大量的估計運算,難以保證實時性,并且遺忘因子的選擇決定了濾波是否發散,因此本文從實時性和濾波魯棒性出發改進Sage-Husa濾波算法。
1.2 Sage-Husa濾波算法的改進
1)實時性改進
卡爾曼濾波的增益和系統狀態估計協方差都與量測噪聲協方差R(k)有關,相比R(k),Q(k)對濾波的影響更大。因此本文基于簡單的Sage-Husa濾波算法,僅對量測噪聲協方差R(k)進行估計,減少原算法的計算量,提高實時性。
2)R(k)估計公式的改進
分析式(2)中量測噪聲協方差的估計公式,可知公式中有負因子,可能會使R(k)失去正定性,使得濾波增益大于1,最終導致濾波發散。為了防止濾波發散,提高濾波魯棒性,本文對量測噪聲協方差估計公式進行修改,如式(3)所示,修改后的公式可以保證R(k)正定,保證濾波增益小于1,抑制濾波發散的可能性。
R(k)=(1-dk)R(k-1)+
dk{[I-HK(k)]ε(k)εT(k)×
[I-HK(k)]T+HP(k)HT}
(3)
改進依據:量測噪聲R的極大后驗估計公式為

(4)
將X(i/i)近似代替X(i/k),將會提高估值的精度,且能夠增加正定因子,則:
Z(i)-H(i)X(i/i)=Z(i)-
H(i)[X(i/i-1)+K(k)ε(i)]=
[I-H(i)K(i)]ε(i)
(5)
故得到次優極大后驗估計公式為:

(6)
利用指數加權法即可得到本文中R(k)的改進公式。
3)最佳遺忘因子的選擇
在Sage-Husa自適應濾波算法中,遺忘因子b的取值恰當與否直接關系到濾波是否發散。若濾波出現發散,則有:
(7)
式中的e(k)為卡爾曼濾波的預測殘差,ξ為儲備系數。當儲備系數取值為1時,可得到最佳的濾波估計效果,本文基于預測殘差的最佳遺忘因子選擇算法,結合式(3)和式(7)可求出遺忘因子的最佳取值為:
(8)
2 基于自適應實時小波的融合航跡后處理方法
采用上節提出的改進卡爾曼濾波可得到目標的狀態估計,本節采用簡單凸組合算法對狀態估計進行融合,但是傳統的簡單凸組合算法會對所有的局部航跡進行融合,包括準確性與穩定性較差的局部航跡,導致最終的融合結果不理想,因此需進行改進。
2.1 簡單凸組合融合算法

(9)
由于簡單凸組合融合算法只關注融合過程,沒有考慮到系統航跡的平滑度問題,因此本文提出小波變換對系統航跡進行平滑處理,降低融合誤差的起伏性,提高融合精度。
2.2 實時小波自適應平滑航跡
小波變換的原理是選擇合適的母小波,通過縮放母小波的寬度得到信號的頻率信息,通過平移母小波獲得信號的時間信息。對于任意函數或者信號f(t),母小波函數φ,連續小波變換如式(10)所示:
(10)
由于本文處理的數據是離散的,因此需采用離散小波變換。離散小波變換是將縮放因子a和平移因子b用2j的倍數表示,離散小波變換可在不同頻率范圍下將信號通過濾波器分解成低頻分量與高頻分量用于后續分析,稱為Mallat算法,如圖1所示。
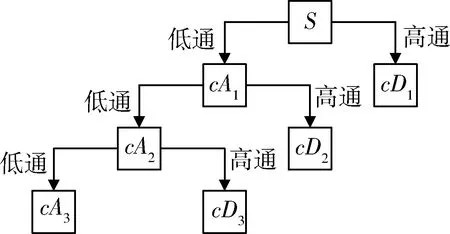
圖1 Mallat算法執行步驟
傳統的小波變換需等待數據全部到達才進行統一處理,無法保證實時性。因此,為提高小波變換的實時性,需建立分段的緩沖區,采用離散小波變換分析緩沖區的數據,對不需要平滑的航跡不予處理。基于抽樣檢測的思想,本文改進了實時小波,如圖2所示。

圖2 本文改進的實時小波算法流程圖

3 航跡融合方法架構圖
在分布式組網雷達中,每部雷達都會配置跟蹤模塊,并將估計好的信息傳送至融合中心,融合中心再對局部航跡估計進行融合,最終輸出系統航跡。針對本文方法構建的航跡融合架構如圖3所示。首先雷達1和雷達2各自獨立采用自適應卡爾曼濾波跟蹤目標,并將估計信息傳送給航跡融合模塊,接著采用簡單凸組合算法融合各自的目標狀態估計,最后對融合航跡采用實時小波平滑處理,輸出系統航跡。

圖3 本文提出的航跡融合技術總體架構圖
4 仿真分析
本節仿真環境為兩部不同精度的雷達跟蹤同一個目標,精度較低的雷達為雷達1,精度較高的雷達為雷達2,目標運動軌跡如圖4所示,在Z軸方向處于上升趨勢,在后半段進行了機動轉彎。仿真數據采用兩部防空雷達的實測數據,因此X軸、Y軸和Z軸的數據信息分別用a,b和c三個指標進行量化,并且噪聲特性未知。仿真方法為本文算法與傳統融合算法(簡單凸組合融合算法)。分析方式分為定性分析與定量分析,以下依次展開。
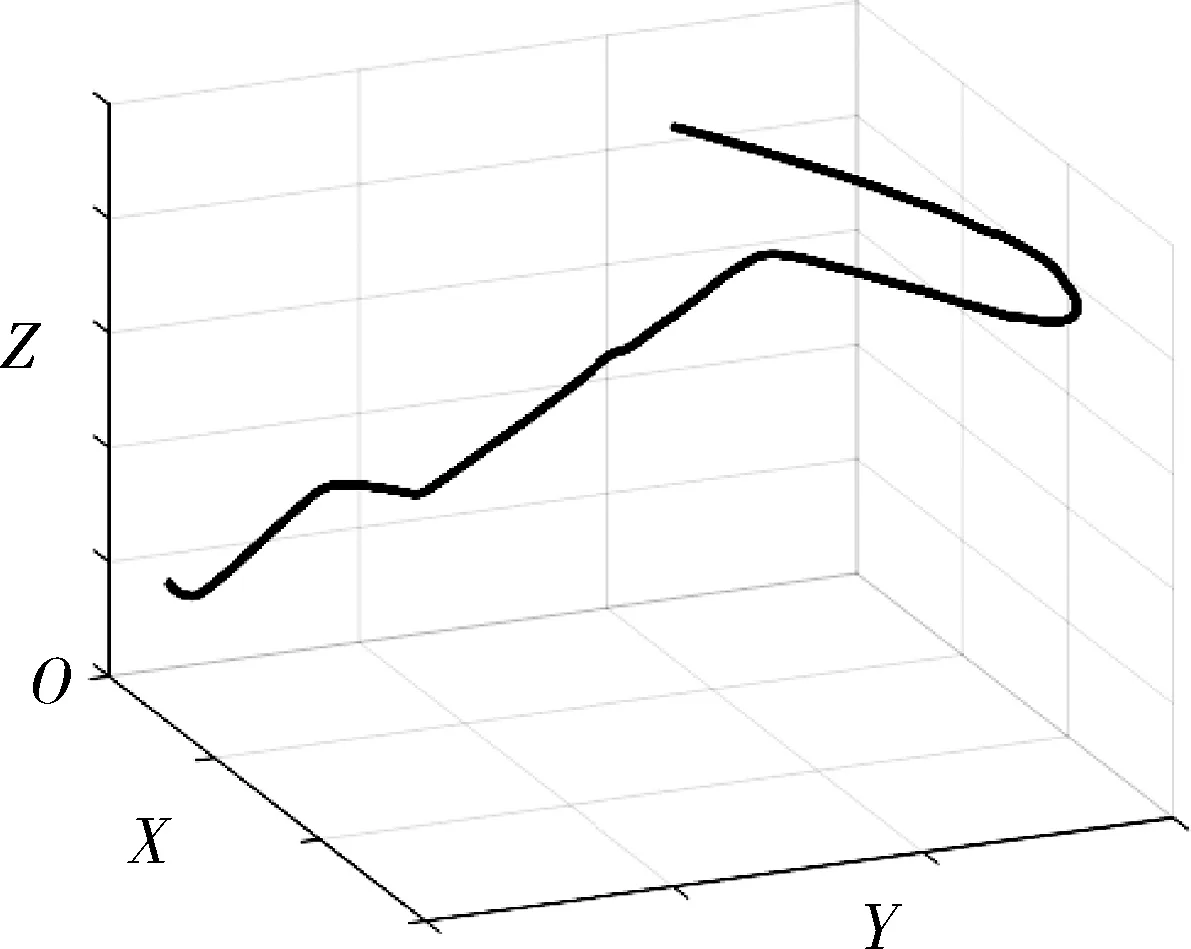
圖4 目標運動軌跡
首先,定性分析仿真結果,如圖5~圖7所示。圖5為采用傳統融合算法與本文算法的X軸誤差對比圖;圖6為采用傳統融合算法與本文算法的Y軸誤差對比圖;圖7為采用傳統融合算法與本文算法的Z軸誤差對比圖。
從圖5~圖7可以看出改進卡爾曼濾波處理實測數據時沒有發散,因為融合后的航跡沒有出現大范圍誤差較大的現象;從圖5和圖7中可以看出采用傳統算法融合后的航跡平滑度差,這是由于不同傳感器噪聲特性不一樣導致的,并且在跟蹤步長為3000~3500之間航跡穩定性較差,從圖4可以看出后半段目標進行了轉彎機動,故導致融合質量變差。采用本文算法處理后,航跡變得更加平滑,并且在轉彎處降低了誤差起伏性;從圖6可以看出本文的算法有針對性地處理融合后的航跡,因為圖6中航跡平滑度低于本文設置的閾值,可對其不進行平滑處理,減小計算量。

圖5 融合前后X軸方向的誤差對比圖

圖6 融合前后Y軸方向的誤差對比圖

圖7 融合前后Z軸方向的誤差對比圖
其次,定量分析仿真結果,如表1所示,采用均值、標準差、均方根誤差RMSE衡量本文算法與傳統融合算法的融合效果。從表中可以看出,傳統融合算法雖然改善了融合航跡的均值,但是對標準差并沒有明顯改善。經本文算法優化后,X軸與Z軸的標準差明顯降低,穩定性較好。均方根誤差RMSE也有所降低,提高了跟蹤精度。Y軸由于航跡平滑度好,故不予處理,達到了根據平滑度自適應融合的效果。以RMSE為準進行對比分析,可以得出融合后的航跡在X軸、Y軸和Z軸的精度相比雷達2的航跡精度分別提升了58.9%、67.4%和57.3%。

表1 融合前后的對比結果
最后,對本文算法的運行時間進行了額外測試。以跟蹤5000次的總耗時為準,對比本文算法與未優化算法的總耗時。可以得出未優化的Sage-Husa算法和小波變換總耗時2.43s,本文算法的總耗時為1.26s。因此,經本文算法優化后提高了實時性,驗證了本文算法的有效性與合理性。
5 結論
本文對Sage-Husa濾波算法進行了改進,提高了卡爾曼濾波的魯棒性,獲得了準確的目標狀態估計。為了進一步提高跟蹤精度,本文根據航跡平滑度,采用簡單凸組合與實時小波,對兩部雷達的目標狀態估計進行自適應融合,對于不需要平滑的航跡采用傳統融合算法,對于需要平滑的航跡采用本文改進的實時小波。仿真結果表明,經本文算法融合后,相比精度較高的雷達航跡,融合航跡的準確性與穩定性均提升50%以上,X軸、Z軸的跟蹤精度相比傳統航跡融合算法均有大幅改善,Y軸的航跡不需要進行處理,提高了實時性,具有工程應用意義,驗證了本文方法的有效性與合理性,對于獲取更精確的目標信息,提高組網雷達作戰能力具有重要意義。
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
