四旋翼無人機反步積分自適應控制器設計
2021-07-29 03:19:14王慧東周來宏
兵工學報 2021年6期
王慧東,周來宏
(1.包頭職業技術學院 數控技術系,內蒙古 包頭 014030;2.新余學院 機電工程學院,江西 新余 338004)
0 引言
近年來,無人機在軍事、民用和商用領域得到了廣泛應用,逐漸成為航空飛行器領域的研究熱點[1-5]。其中,四旋翼無人飛行器更成為無人機研究的新寵,相對于直升機和固定翼飛機,具有體積小、質量輕、操控靈活等特點,可完成垂直起降、低空懸停、低速巡航等飛行動作,因此廣泛應用于軍事偵察、搶險救災、農林植保、航拍攝影等領域[6-9]。雖然四旋翼無人機具有很多優點,但它是一個欠驅動系統,只有4個控制輸入,卻有6個控制輸出,并且四旋翼系統還具有強非線性、強耦合、強時變性等特點,給飛行控制系統的設計帶來了巨大的挑戰[10-14]。
國內外很多學者應用線性、非線性及智能控制方法設計了四旋翼無人機控制系統。如Salih 等[15]用PID算法設計了飛行控制器;Besnard等[16]用滑模算法設計了抗干擾觀測器,用于抑制飛行中受到的外界干擾;Shirzadeh等[17]基于視覺方法為四旋翼無人機設計了一種神經網絡控制器;Erginer等[18]設計了混合模糊PID控制器,用以研究四旋翼無人機的時間延遲問題。這些研究成果使四旋翼的飛行控制系統有了一定改進。
但是,當四旋翼無人機用于執行某些特殊的飛行任務時,其自身參數(如自身質量)會產生較大變化,例如在執行噴灑農藥、播種、授粉、滅火等任務時,無人機自身質量會隨時間緩慢減小,且減小量可能會達到初始質量的2/3,從而給飛行控制帶來嚴重干擾。之前的研究大多沒有考慮四旋翼在這類情況下的應用,而是假設無人機質量為固定值,從而引入了較大的模型參數誤差,降低了控制器的穩定性,嚴重影響了無人機的飛行品質。
本文研究主要針對四旋翼無人機在有質量慢變情況下的應用,基于自適應控制理論設計質量觀測器來估計四旋翼的實時質量,并用估計值修正控制系統的質量參數。將質量觀測器與經典反步控制器(CBC)結合,并增加了第一類控制誤差的積分,提出了反步自適應控制器(BIAC),用于無人機的飛行控制。仿真實驗結果表明:當無人機發生質量慢變或質量突變的情況時,BIAC都可以更好地估計四旋翼的實時質量,估計誤差為自身質量的5%~8%;ze軸的軌跡跟蹤誤差也大為減小,相對CBC,ze軸的跟蹤誤差減小80%左右。表明BIAC能夠更有效地對變質量四旋翼無人機進行實時控制,軌跡跟蹤精度明顯提高。
1 四旋翼無人機動力學模型

(1)
式中:R和N為轉換矩陣,

(2)
(3)
四旋翼無人機通過適當改變4個旋翼的轉速,產生φ、θ、ψ3種姿態角,并產生相應的運動,如圖1、圖2所示。圖1中,m為無人機質量,g為重力加速度,F1、F2、F3、F4分別為旋翼1、旋翼2、旋翼3、旋翼4的升力,ω1、ω2、ω3、ω4分別為旋翼1、旋翼2、旋翼3、旋翼4的轉速。
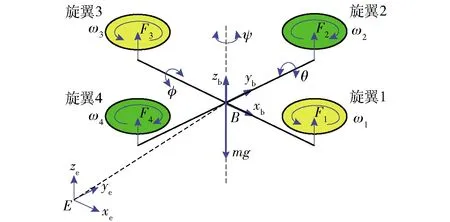
圖1 四旋翼無人機結構圖

圖2 四旋翼無人機運動示意圖
為了簡化動力學模型,便于求解計算,對四旋翼系統做出如下假設:
1)四旋翼無人機的機身是嚴格對稱的剛體。
2)無人機的幾何中心與質量中心重合。
3)忽略飛行中的槳葉揮舞和外部干擾。
利用牛頓定律和歐拉方程,可以得到四旋翼無人機動力學方程為
(4)
式中:Ff、Fd和Fg分別為平動力、平動空氣阻力和重力;I、Mf和Md分別為轉動慣量、轉動力矩和空氣阻力力矩向量。(1)式~(3)式代入(4)式,并考慮假設條件,可整理得到無人機非線性動力學模型如下:
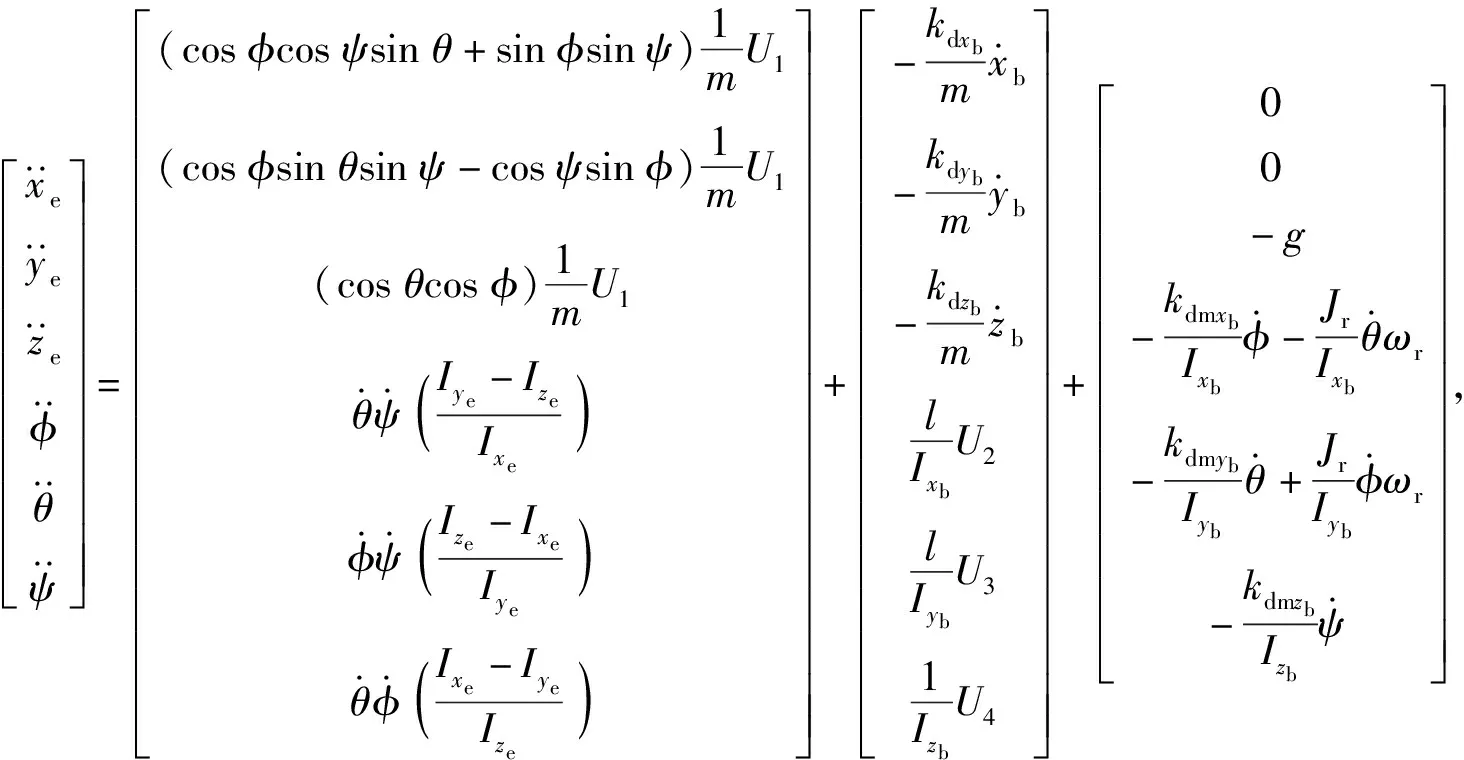
(5)
式中:Jr為電機轉動慣量;Ixb、Iyb、Izb分別為無人機繞xb、yb、zb軸的轉動慣量;kdxb、kdyb、kdzb分別為無人機沿xb、yb、zb軸的空氣阻力系數;l為旋翼中心到機體坐標系原點的距離;kdmxb、kdmyb、kdmzb分別為無人機沿xb、yb、zb軸的空氣阻力矩系數;Ui(i=1,2,3,4)為控制輸入,
(6)
b為U1、U2、U3與轉速之間的轉換系數,d為U4與轉速之間的轉換系數;ωr為電機轉速差值,
ωr=ω2+ω4-ω1-ω3.
(7)
定義控制輸入向量為
(8)
式中:uxe、uye為虛擬控制輸入。
2 CBC控制器設計
由于四旋翼無人機飛行速度較低,空氣阻力Fd和空氣阻力矩Md對模型精度的影響可忽略,在地球坐標系Exeyeze下建立四旋翼系統的非線性動力學方程為
(9)
式中:
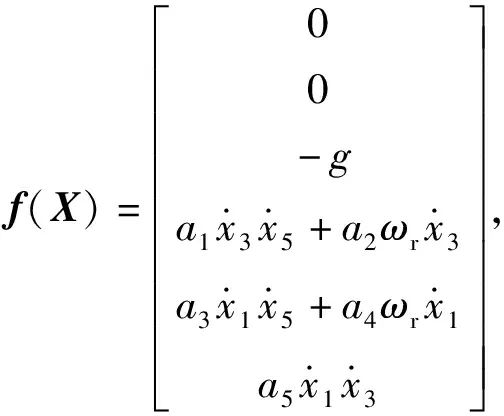
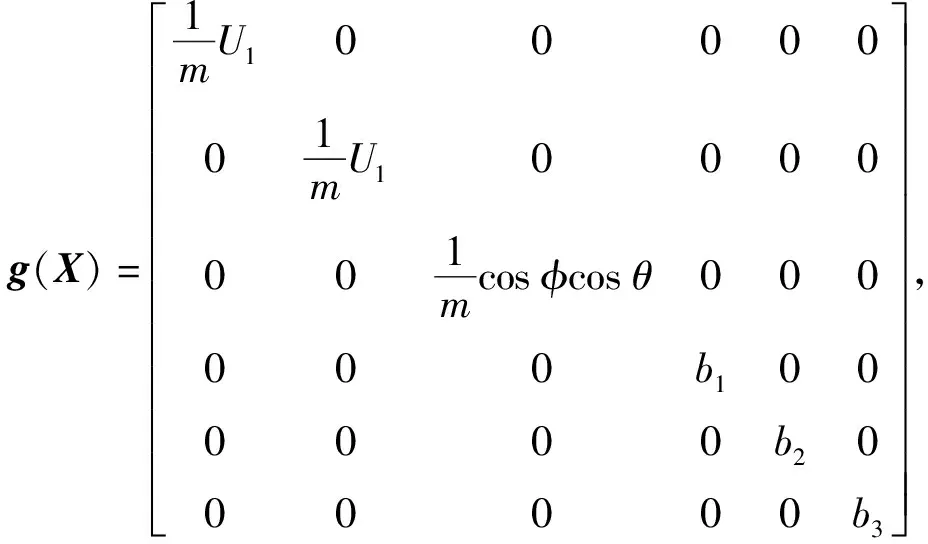
(10)
式中:
(11)

步驟1引入第一類跟蹤誤差向量
(12)
式中:e1、e3、e5、e7、e9、e11分別為x1、x2、x3、x4、x5、x6的第一類跟蹤誤差。
選擇Lyapunov函數為
(13)
對V1按時間求導,有
(14)
為穩定E1,引入函數
(15)
式中:K1為參數向量,K1=[k1k3k5k7k9k11],k1、k3、k5、k7、k9、k11均為正常數。
(16)
步驟2引入第二類跟蹤誤差向量

[e2e4e6e8e10e12]T,
(17)
式中:e2、e4、e6、e8、e10、e12分別為xj,j=1,2,…,6的第二類跟蹤誤差。對E2按時間求導,有
(18)
選擇Lyapunov函數為
(19)
對V2按時間求導,有




(20)
步驟3為了使E2穩定,選取控制律Uc為
(21)
式中:K2為參數向量,K2=[k2k4k6k8k10k12],k2、k4、k6、k8、k10、k12均為正常數。用Uc代替(20)式中的U,則V2的導數可以改寫為
(22)

3 BIAC設計
對于存在質量慢變的四旋翼系統,基于自適應控制理論設計了質量觀測器,用于估計無人機的實時質量,并在反步控制方法基礎上增加第一類誤差的積分,設計BIAC。考慮系統質量僅與控制輸入uxe、uye和U1有關,因此質量觀測器僅作用于控制系統的位置控制器,如圖3所示。
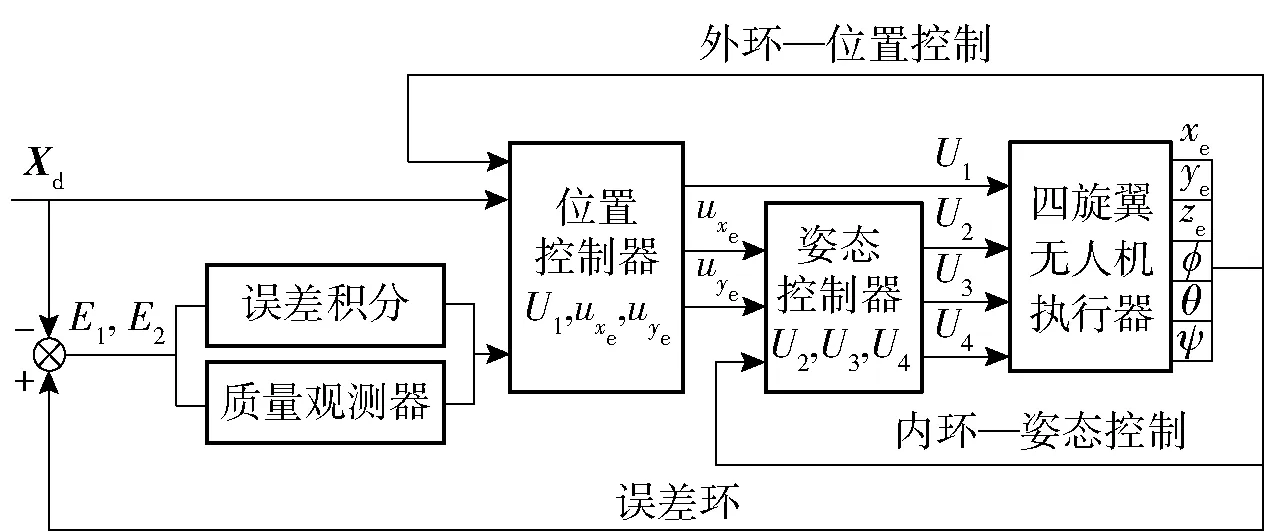
圖3 四旋翼無人機控制方案
BIAC的設計過程如下:
步驟1將(21)式中uxe、uye和U1的質量m替換為估計質量并引入誤差積分,可以得到
(23)
(24)
步驟2定義系統質量的觀測誤差為
mδ=m-.
(25)
由于系統質量緩慢變化,質量變化對時間的導數近似為0 kg/s,則mδ對時間求導,得
(26)
步驟3選擇新的Lyapunov函數為
(27)
式中:km為質量自適應參數。
V3對時間求導,得
(28)
步驟4令
(29)
為了使質量觀測誤差mδ收斂,令對時間的導數為
(30)
(31)

控制律(21)式中的位置控制律替換成(23)式,可以得到BIAC的控制律為
(32)
式中:P為誤差積分向量,P=[p1p3p50 0 0]T。
由此可得BIAC的姿態控制律為
(33)
4 仿真結果及分析
為了驗證BIAC對變質量四旋翼無人機的控制效果,在MATLAB/Simulink軟件環境下進行軌跡跟蹤的仿真實驗。期望軌跡為地球坐標系Exeyeze下Exeye平面的圓形軌跡,ze軸為固定高度2 m,期望軌跡表達式為
(34)
設置初始值xe0=4 m,ye0=6 m,ze0=2 m,仿真時間為20 s.系統的初始質量為0.65 kg,質量的變化量Δm=-0.02×t(kg),t為仿真時間,施加外部周期干擾力fxe=fye=fze=0.2×Nsint.仿真結果如圖4和圖5所示,質量估計結果如圖6所示。
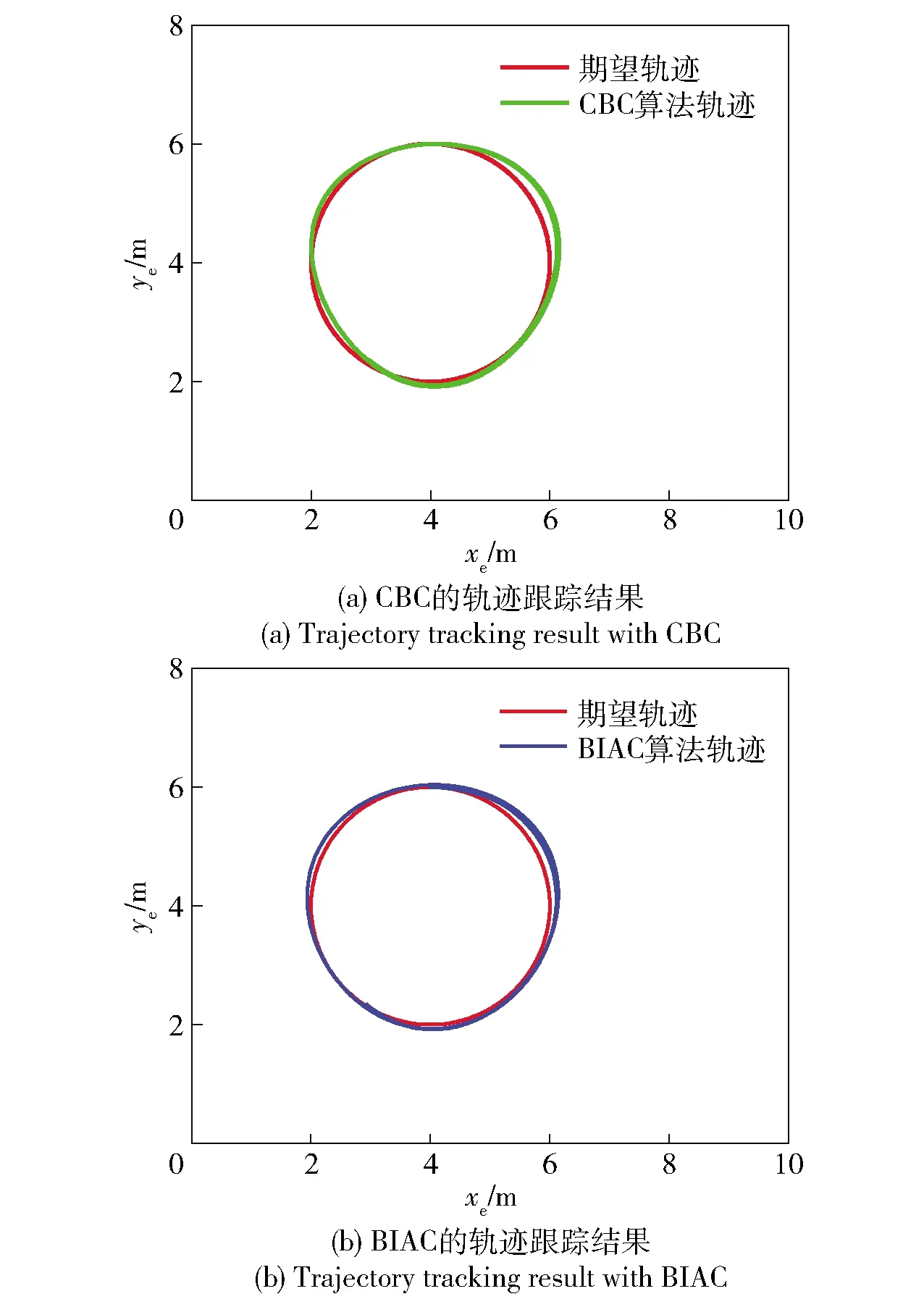
圖4 Exeye平面的軌跡跟蹤
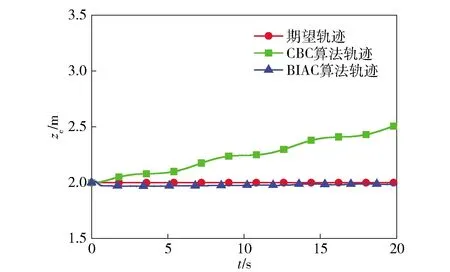
圖5 ze軸的軌跡跟蹤
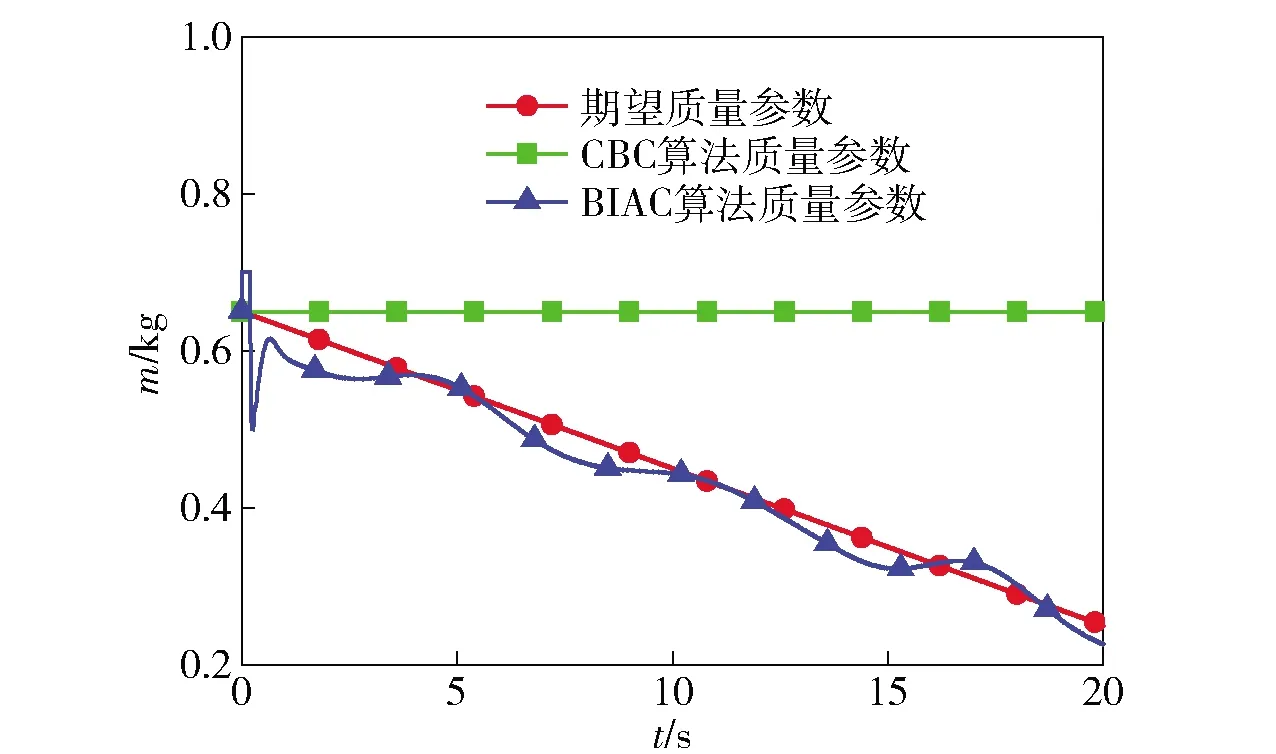
圖6 四旋翼無人機的實時質量
從圖4(a)、圖4(b)可以看出,在Exeye平面內,CBC和BIAC都可以使四旋翼無人機較好地跟蹤預定軌跡,可見無人機的質量變化對xe軸方向、ye軸方向的控制影響不大。由圖5可知,在ze軸方向,由于系統質量一直設置為初始值0.65,質量誤差隨時間累積,用CBC得到的跟蹤誤差逐漸增大;由于使用質量觀測器估計并修正了系統實時質量,BIAC的跟蹤誤差隨時間逐漸減小。在20 s內ze軸的平均跟蹤誤差,BIAC較CBC減小了89%.
從圖6中可以看出:用BIAC得到了系統質量估計值,在初始階段經歷了短暫的波動后,逐漸逼近系統的真實質量;受到外部周期干擾的影響,質量估計誤差也呈現出周期性振動,但振幅不大,表明在引入誤差積分后,質量觀測器的魯棒性得到了提高;20 s內系統質量估計的平均誤差,為系統自身質量的5.2%.
當無人機在仿真第5 s時產生質量突變,質量的變化量Δm=-0.3 kg,仍然對無人機施加外部周期干擾力fxe=fye=fze=0.2×Nsint,此時ze軸的軌跡跟蹤和無人機實時質量結果如圖7、圖8所示。由圖7可以看出:在無人機發生質量突變后,CBC控制律的位置誤差產生了突變,并且穩態誤差沒有隨時間減小,表明質量突變使控制精度大為降低;BIAC仍然能夠穩定地跟蹤ze軸軌跡,穩態跟蹤誤差沒有發生突變;20 s內BIAC的ze軸平均跟蹤誤差較CBC減小了71%.由圖8可以看出,BIAC得到了系統質量估計值收斂于系統的真實質量,20 s內質量估計的平均誤差,為系統自身質量的7.6%,最大超調量為29%.
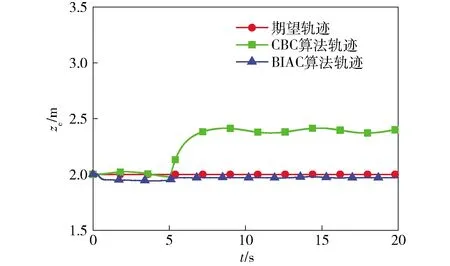
圖7 質量突變情況下ze軸軌跡跟蹤
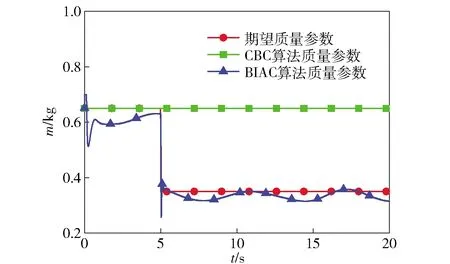
圖8 質量突變情況下四旋翼無人機的實時質量
5 結論
本文基于自適應控制理論設計了質量觀測器,用于估計四旋翼無人機的實時質量,與CBC相結合,并在位置控制器中增加了第一類控制誤差的積分,提出了BIAC,用于無人機的軌跡跟蹤控制。仿真實驗結果表明,質量觀測器可有效地估計無人機的實時質量,并有較強的魯棒性,通過實時修正質量參數降低了無人機ze軸的軌跡跟蹤誤差。因此,對于存在質量慢變或突變的四旋翼無人機系統,BIAC都能夠更好地完成軌跡跟蹤任務,跟蹤精度明顯優于CBC.
目前的研究只使用仿真方法對控制器進行了驗證,沒有對控制參數進行實際整定;在未來的工作中,將利用四旋翼無人機試驗平臺驗證并優化本文提出的控制算法。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16