有源電力濾波器控制方法研究現狀
2021-07-29 13:47:32亞志政
天津科技 2021年7期
亞志政
(天津泰達電子工程有限公司 天津 300450)
0 引 言
隨著現代化進程的加快,各種電力設備如整流器、變頻調速設備以及各種電力電子設備相繼投入到生產運行中。由于上述設備的非線性對供配電系統造成了相當嚴重的問題,如何治理諧波造成的污染和損失也成為各國研究的重點。
有源電力濾波器(APF)可同時實現諧波和無功功率的動態補償,補償效果好,所以各國把研究的重心放在APF上。其中APF的補償電流跟蹤控制能力決定了其整體性能。本文重點分析對比了各種主要的控制方法以及近些年發展迅速的智能控制方法。
1 有源電力濾波器的工作原理
如圖1可知,諧波源是其中的非線性負載,它主要消耗無功功率并且發出一定頻率的諧波。APF由幾個部分構成,其最重要的核心部分分別是指令電流運算電路和補償電流發生電路。
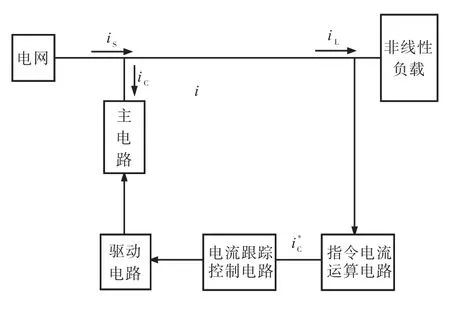
圖1 有源電力濾波器原理圖Fig.1 Schematic diagram of active power filter
指令電流運算電路的功能是檢測出需要補償的設備中電流的無功和諧波等電流分量。補償電流發生電路的功能是按照指令電流運算電路給出的補償電流指令信號產生實際的補償電流,該電路主要包括3部分,分別是電流跟蹤控制電路、驅動電路和主電路[1]。
2 補償電流控制方法
2.1 滯環比較控制方法
由圖2可知,該方法是把補償電流的指令信號與實際的補償電流信號進行比較,再將兩者比較的差值輸入到滯環比較器當中,通過滯環比較器產生控制主電路中開關器件通斷的脈沖寬度調頻(PWM)信號,該信號經驅動 電路來控制開關器件的通斷,從而控制補償電流的 變化。
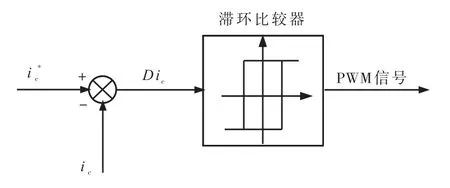
圖2 滯環比較控制方法Fig.2 Hysteresis comparison control method
上述控制方法的優點是響應速度快,整體結構簡單,而且在輸出的電壓當中諧波成分相對少。它的缺點是滯環寬度很大程度上決定了開關頻率、損耗以及控制的精度,如果滯環寬度比較小,那么控制的精度相應比較高,但這會造成開關頻率和開關損耗增加。文獻[2]將該控制方法應用到APF當中取得了一定的補償效果。
2.2 滑模控制方法
該方法與其他控制方法的不同在于它的控制是不連續的,隨著系統的運行,滑模控制方法根據檢測出的系統狀態隨時做出調整,強迫系統運動在既定的狀態軌跡當中,即滑模面上。因為這種狀態軌跡是可以人為設計的,并且和系統對象的參數及擾動無關,所以該方法具有對參數變化及擾動不敏感、無需系統在線辨識等優點。電力電子裝置拓撲結構的特點與上述控制方法的特點非常匹配,因而它在APF當中得到了非常廣泛的應用。
滑模控制方法主要的缺點在于當系統的狀態軌跡到達滑模面之后,它不會一直沿著滑模面向平衡點滑動,而是從滑模面的一側運動到另一側這樣反復運動,即產生了抖振。文獻[3-4]對APF通過其他途徑來降低抖振取得了一定的效果,但是控制算法設計比較復雜。圖3描述了上述過程。
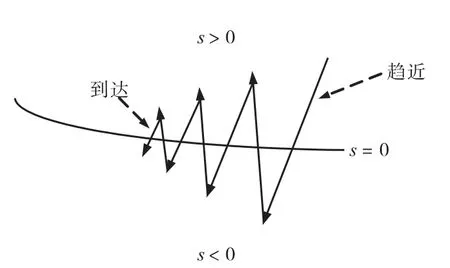
圖3 滑模運動過程Fig.3 Sliding mode movement process
2.3 自適應控制方法
自適應控制主要分為2種,一種是模型參考自適應控制,另一種是自校正控制。模型參考自適應控制根據不同的控制需求使參考模型的輸出滿足一定條件,其中調節環節根據一定的要求調節控制器的參數,以此使參考模型的輸出和控制對象的輸出保持一致。自校正控制首先需要通過檢測到輸入和輸出的值,然后將它們的值輸入到參數估計器,該環節通過迭代的方法估計出對象參數,計算器根據已經編寫的規則和得到的參數估計值計算控制器參數,最后通過上述方式控制被控對象從而達到控制目標。文獻[5]將該控制方法應用到了APF當中。
2.4 模糊控制方法
利用模糊控制方法首先需要對模糊集合和模糊邏輯有一定的認識,因為該方法是以它們為基礎的一種控制方法。其特點是利用隸屬度函數來確定每個元素多大程度上屬于某一個集合。模糊控制以模糊集理論為基礎,以模糊語言變量和邏輯推理為工具,依照以往的實際經驗和知識,通過一定的規則來達到控制目的。
模糊控制經常和PI控制結合使用,因為PI控制雖然結構簡單,但是PI控制參數的選取依賴于系統的精確模型,對于一些復雜系統,模型往往不易建立,控制參數的選擇成為難題,而且PI控制的魯棒性比較差,容易引發超調。模糊控制就不受限于建模,而且魯棒性能好,兩者的結合可以彌補單純PI控制的缺點,同時帶來更高效的動態響應速度,更低的超調,更小的靜態誤差等。文獻[6-7]利用模糊控制的特點來調整Kp和Ki這2個參數使得APF的直流側電壓有良好的穩定值。
2.5 人工神經網絡控制方法
人工神經網絡(artificial neural networks,ANN)是依照一定的規則通過數量很多的、比較簡單的神經元相互組合在一起而形成的計算機系統,隨著外部信息不斷輸入,該系統的狀態做出一定的響應來處理信息,可以把ANN當成一個模仿人類大腦結構以及它的功能的信息處理系統。ANN有幾個主要的特點:本質上是非線性系統,能充分逼近任意復雜的非線性關系;無需建立輸入輸出間明確的關系,而是通過學習過程和自適應算法實現,能夠適應不確定系統的動態特性;系統信息存儲在神經元及連接權中,具有很強的魯棒性和容錯能力;具有并行處理能力,可極大地加快系統的速度和可靠性。
由于APF本身是一個非線性系統,根據上面的描述可以看到,將ANN應用于APF控制是比較符合其特點的。基于神經網絡控制的APF如圖4所示,它的工作原理是依照一定的算法來完成神經網絡的訓練數據,通過輸入給神經網絡的電流誤差信號來控制電路產生需要的PWM開關控制信號,從而產生需要補償的諧波電流。
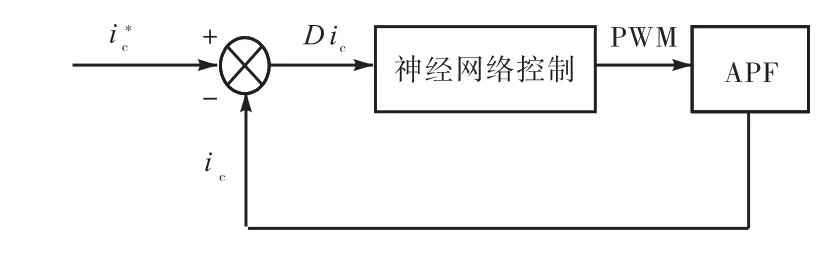
圖4 基于神經網絡控制的APF系統Fig.4 APF system based on neural network control
文獻[8]將神經網絡應用到APF的補償電流控制當中,但是該方法比較復雜而且只是處于試驗階段。
3 有源濾波器發展方向
盡管近年來人們對APF的控制方法已經做出了非常多的研究和討論,但是各種方法都存在著自己的一定缺點,所以人們還是需要對各種控制方法做出相關的改進,根據上面的描述,對APF的發展方向做出如下總結。
① 傳統控制方法一般結構相對簡單,控制過程也不復雜,響應速度比較快,但是這些控制方法一般情況下都不具備在線調整能力,針對一些不確定的系統往往效果不很理想,如果能和其他現代控制理論或智能控制方法相結合,將會取得一定的改進。
② 由于APF的電壓、電流耦合在一起,APF本身是一個強非線性系統,APF的參數也會隨著系統的運行發生改變所以具有一定的不確定性,而且APF針對的補償對象即電網系統本身也是一個非常復雜的被控對象。基于上述原因,現代控制方法具有在線調節能力以及比傳統控制方法更強的魯棒性,故其控制精度更高,補償效果也更加理想。
③ 現階段,APF智能控制方法還未到達大規模有效使用階段,但是相對于它的研究速度比較快。與ANN相比而言,模糊控制方法計算量比較少,同其他控制方法結合相對效果也比較好,故有一定的應用
前景。
4 結 論
本文在研究分析APF工作原理的基礎上,分別從不同的層面對比分析了針對APF補償電流的各種控制方法以及它們的優缺點,最后根據控制方法的特點給出了未來的研究方向。通過本文的闡述可以了解到當前對APF控制方法的研究還不夠成熟,如何將已有的研究成果加以完善并在應用當中帶來實際效益,值得進一步思考。■
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12