基于改進坐標轉換的人體運動軌跡識別方法
2021-07-29 07:32:58于燕山郭鵬
微型電腦應用 2021年7期
關鍵詞:方法
于燕山,郭鵬
(1.西安工程大學 體育部,陜西 西安 710048;2.滄州交通學院 通識教育學院,河北 滄州 061199)
0 引言
視頻內容中人物活動分析在人機交互、虛擬現實、視頻檢索以及內容識別等方面應用廣泛,引起學術界的廣泛關注[1]。唐超等[2]提出基于多視圖半監督學習的人體行為識別方法,提出3種模態視圖數據表征人體動作,使用多視圖半監督學習框架建模,利用不同視圖提供的互補信息確保少量標記和大量未標記數據半監督學習取得更好的分類精度,實現人體行為識別。李梁華等[3]提出高效3D密集殘差網絡及其在人體行為識別中的應用。設計了高效 3D卷積塊替換原來計算量大的 3×3×3卷積層用于人體行為識別。高效 3D卷積塊由獲取視頻空間特征的 1×3×3卷積層和獲取視頻時間特征的3×1×1卷積層組合而成。將高效 3D卷積塊組合在密集殘差網絡的多個位置中,完成人體行為的識別。
當前常用的人體行為識別方法受到復雜背景、可變光照及視角變化等影響,無法準確識別人體運動軌跡。為此,提出基于改進坐標轉換的人體運動軌跡識別方法,通過研究關節活動幅度軌跡對人體運動軌跡進行深入分析。
1 改進坐標轉換下人體運動軌跡識別
1.1 人體運動區域分割
本節對視頻中人體運動區域進行分割,為后續處理提供基礎,降低整體計算量[4]。區域分割通過背景提取與差分二級化實現。
通過背景消除法對人體運動軌跡區域進行分割時,需從圖像序列中恢復背景圖像[5],假設{Om,m=1,2,…,M}為含M幀圖像的視頻,那么背景圖像G獲取式為式(1)。
G=γ1Om+γ2G′
(1)
式中,γ1+γ2=1,在初始化時G′=O1。
為了將前景人體運動區域從背景中分割出來,完成差分處理,需通過式(2)。
(2)
式中,0≤F(u,v)<1;0≤u(x,y);v(x,y)≤255;u(x,y)與v(x,y)依次用于描述當前圖像與背景圖像在像素(x,y)處的亮度值。針對人體運動圖像O(x,y),利用二值化提取函數得到圖像中改變的像素,得到前景圖像G′,實現人體運動區域分割。
1.2 人體運動關節點坐標系建立
為了最大程度地降低人體運動中個體間的差異,需把人體運動空間描述轉換至人體運動關節點空間坐標系,構造符合人體運動的交互動作特性[6-7]。本節將人體右手方向看作X軸正方向,頭部正上方看作Y軸正方向,面向正前方當成Z軸正方向,兩肩中心當成坐標原點。
在進行人體運動關節活動幅度軌跡識別的過程中,身體正方向不一定和拍攝設備平面垂直,需對得到的人體關節節點數據進行轉換[8-9],構造關節節點坐標系,空間坐標系轉換示意圖如圖1所示。

(a)人體運動空間坐標系
圖1(a)所示的是運動空間坐標系,O′代表坐標系O′X′Y′Z′的原點。圖1(b)所示的是拍攝設備空間坐標系下人體繞Y軸旋轉的俯視圖,其中P(x1,z1)用于描述設備空間坐標系中左肩映射坐標點;Q(xq,zq)代表右肩映射坐標點;φ(-45°<φ<45°)用于描述針對設備XOY平面的旋轉角度[10]。
因為得到的關節點數據為鏡面對稱數據,所以設備空間坐標系下坐標點S(x,y,z)和人體空間坐標系O′X′Y′Z′下坐標點S(x′,y′,z′)間的轉換關系如式(3)
(3)
式中,O′(x0,y0,z0)為人體空間坐標系;O′XY′Z′為原點坐標;φ為相對于XOY平面的旋轉角度,φ=arctan((xq-xp)/(zq-zp)),其中xq>xp。
1.3 活動軌跡描述及特征提取
通常情況下,可將人體看作局部剛性不變的鏈式結構,其包括很多關節點,而關節活動幅度的改變體現了人體活動的改變過程,為人體動作的分析提供有效依據[11]。從影像采集設備獲取的深度圖像中有20個節點的三維空間坐標[12],如圖2所示。

圖2 關節點位置示意圖
20個關節點在圖2中詳細標識,這些關節點空間坐標構成關節活動幅度軌跡,從而利用關節活動幅度軌跡描述人體動作A,也就是A=[V1,V2,…,Vi,…,VN]。其中,Vi為關節點i的運動軌跡;N為關節點數量。
關節活動幅度軌跡為該關節不同時刻位置向量組成的序列,不同動作關節活動幅度軌跡長度不同,所以把軌跡有重疊地分割成相同長度的軌跡片段[13-14]。假設關節點i在t時刻的位置為式(4)。
pi(t)=(xi(t),yi(t),zi(t))
(4)
將t時刻作為起點,長度是L的軌跡為式(5)。
Vi=(pi(t),pi(t+1),…,pi(t+L-1))
(5)
為了描述關節i的局部運動模式,求出關節i在相鄰時刻的位移向量,也就是(Δpi(t),Δpi(t+1),…,Δpi(t+L-1)),其中Δpi(t)=pi(t+1)-pi(t)。
下面通過歸一化位移向量序列[15]標識關節活動幅度軌跡為式(6)。
(6)
Fisher向量有很好的分類結果,本節將其作為特征,為人體運動關節活動幅度軌跡識別提供依據[16-17]。
通過高斯混合模型對運動關節活動幅度軌跡進行建模,用J={xj,1≤j≤n}描述訓練集合中關節i的活動幅度軌跡集合,其可通過含c各成分的高斯混合模型獲取,如式(7)。
(7)
式中,φ={λc,εc,σc},c=1,2,…,C;λc代表高斯成分系數;εc代表最小圍距;σc代表邊緣區間關節點個數。
Fisher向量主要包括2部分,如式(8)、式(9)。
(8)
(9)
1.4 人體關節活動幅度軌跡識別
人體關節活動幅度軌跡識別選用DTW方法[18],其可有效實現對不同關節活動幅度軌跡長度模板的匹配。
假設參考模板為B={B(Ψ1),B(Ψ2),…,B(ΨM)},測試模板為U={U(Ψ1),U(Ψ2),…,U(ΨN)},其中B(Ψm)與U(Ψn)代表其內部特征矢量。用r[U(Ψni),B(Ψmi)]描述特征矢量U(Ψni)與B(Ψmi)獲取的失真量,R[U(Ψni),B(Ψmi)]可從U(Ψ1)與B(Ψ1)開始計算,經若干關節點對,直至U(Ψni)與B(Ψmi)的累積失真量,也就是式(10)。
(10)
可以看出R[U(Ψni),B(Ψmi)]相當于求解一條連接不同特征關節點對的軌跡累積失真量。
為了減少計算量,給出迭代過程如式(11)—式(13)。
R[U(Ψni),B(Ψmi)]=r[U(Ψni),B(Ψmi)]+
R[U(Ψni-1),B(Ψmi-1)]
(11)
(12)
R[U(Ψni-1),B(Ψmi-1)]=min(R[U(Ψni-1),
B(Ψmi)],R[U(Ψni-1),B(Ψmi-1)],
R[U(Ψni-1),B(Ψmi-2)])
(13)
在上述迭代的基礎上,從U(Ψ1)與B(Ψ1)開始反復遞歸至U(ΨN)與B(ΨM),從而獲取參考模板與測試模板間的最小累積失真量。把測試模板和全部參考模板匹配,將測試模板歸類于全部累積失真量最小的一類。完整算法流程圖如圖3所示。

圖3 算法流程圖
2 實驗和性能比較
本節依據實驗數據庫,將基于光流關鍵點多尺度軌跡的人體動作識別(文獻[6])、基于深度圖像的人體運動姿態跟蹤和識別算法(文獻[7])作為實驗對照組,驗證本文提出的人體動作軌跡識別方法的有效性。實驗系統建立在32G內存的3.20GHz的PC機上,采用MATLAB 9.0進行仿真實驗,并通過OpenPose人體姿態識別軟件生成人體關節點,關節識別示例如圖4所示。
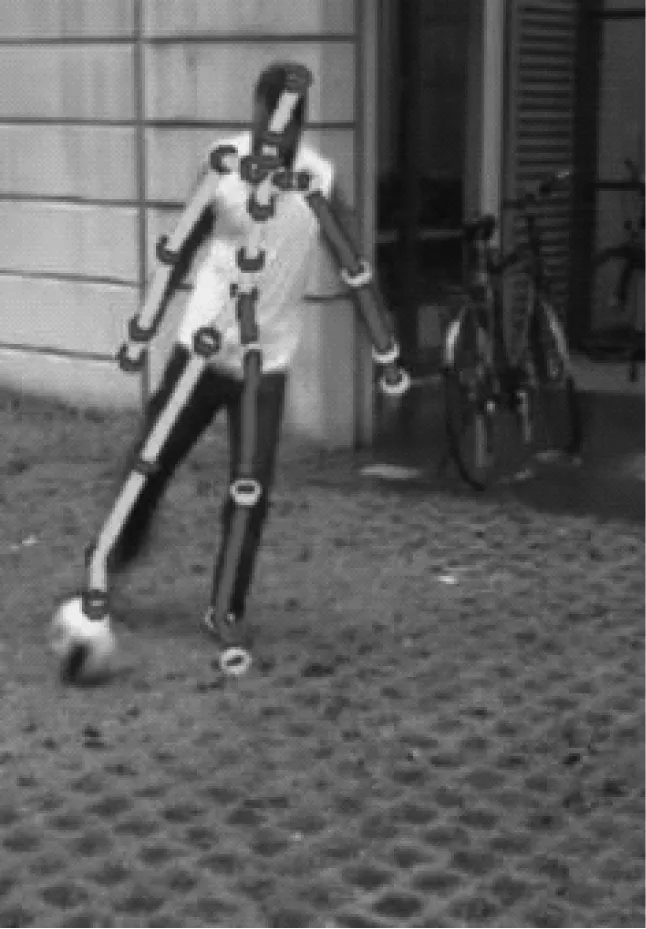
圖4 OpenPose人體關節識別示例
2.1 實驗數據庫
實驗數據庫源于MPII人姿數據庫(http://human-pose.mpi-inf.mpg.de/),數據庫中包含410種人類活動視頻,背景含攝像機抖動,背景、尺度和光照條件存在差異。數據集示意圖如圖5所示。

圖5 數據庫圖像示意圖
2.2 識別結果
針對數據庫圖像,進行Fisher向量提取,發現大部分人體運動動作Fisher向量符合趨勢如圖6所示。

圖6 人體運動動作Fisher向量
依據人體運動動作Fisher向量,通過DTW方法匹配,對走、跑、跳3種典型動作關節活動幅度識別,得到的軌跡變化情況,如圖7所示。
觀察圖7可知,將所提方法軌跡識別結果與實際結果相比,所提方法識別的人體動作和實際動作趨勢基本吻合,沒有明顯差異,說明所提方法識別結果有效。
2.3 不同方法識別率
為了進一步驗證所提方法能否有效識別人體運動軌跡,將文獻[6]方法和文獻[7]方法作為對比進行測試,驗證所提方法的識別有效性。采用所提方法、文獻[6]方法和文獻[7]方法識別實驗數據庫中隨機選取的200段未分割的視頻中人體運動軌跡。通過仿真平臺判定,以可以準確識別為判斷標準,識別率越高,識別效果越好,識別率計算公式為式(14)。
(14)
式中,tα表示準確識別視頻數量;Tβ表示識別視頻總數量。實驗結果如表1所示。
由表1數據可知,在運動軌跡識別過程中,所提方法識別率均高于95%,而對照組方法的識別率均低于92%。因為所提方法依據人體關節活為該關節不同時刻位置向量組成序列,將軌跡有重疊地分割成相同長度的軌跡片段。通過高斯混合模型對運動關節活動幅度軌跡進行建模,提高了人體運動軌跡識別率。

(a)走步動作

表1 不同方法軌跡識別率
2.4 不同方法識別時間
為進一步驗證所提方法的識別速度,基于上述實驗環境,識別200段數據庫中的人體運動軌跡,對比3種方法的識別時間,實驗結果如圖8所示。

圖8 不同方法軌跡識別時間
由圖8可知,在相同樣本數量下,所提方法識別時間低于30 s,而對照組方法的識別時間則高于35 s。綜合分析上述實驗結果可以看出,采用所提方法對人體運動軌跡進行識別,識別結果可靠,準確性明顯高于其它方法,識別效率較高,為人體運動軌跡識別提供有效的科學依據。
3 總結
為了為人體運動識別提供可靠依據,提出一種基于改進坐標轉換的人體運動軌跡識別方法。
(1)通過背景提取與差分二級化實現人體運動區域分割,為后續處理提供基礎,降低整體計算量。
(2)把人體運動空間描述轉換至人體運動關節點空間坐標系,構造符合人體運動的交互動作特性。將人體右手方向看作X軸正方向,頭部正上方看作Y軸正方向,面向正前方當成Z軸正方向,兩肩中心當成坐標原點。對得到的人體關節節點數據進行轉換,構造關節節點坐標系。
(3)從影像采集設備獲取的深度圖像中有20個節點的三維空間坐標,通過歸一化位移向量序列標識關節活動幅度軌跡。
(4)人體關節活動幅度軌跡識別選用DTW方法,獲取參考模板與測試模板間的最小累積失真量,把測試模板和全部參考模板匹配,將測試模板歸類于全部累積失真量最小的一類中,實現對不同關節活動幅度軌跡長度模板的匹配。
(5)實驗結果表明,所提方法識別的人體運動軌跡和實際軌跡間趨勢趨近相似,說明所提方法識別結果有效。
綜上可知,采用所提方法對人體運動軌跡進行識別,識別結果可靠,準確性高,有較強的可行性,能夠為人體運動識別提供有效的科學依據。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
