基于負荷跟隨閾值變化規則的并聯混合動力汽車能量管理策略*
2021-07-29 07:52:14周金應徐磊程前劉延陳亞偉
公路與汽運 2021年4期
周金應, 徐磊, 程前, 劉延, 陳亞偉
(中國汽車工程研究院股份有限公司, 重慶 401122)
混合動力汽車具有節能、低污染、技術成熟等優勢,已成為車輛電動化轉型升級的解決方案之一。與傳統燃油汽車相比,混合動力汽車的動力系統具有多個動力源,一般通過監控系統(SCS)對多個動力源進行功率分配。SCS控制策略主要分為基于優化和基于規則的兩種方法。基于優化的控制策略通過求解復雜的優化問題實現能量分配管理,典型代表有動態規劃(DP)、等效燃油消耗最小化策略(ECMS)和龐德里亞金最小值原理等。這類控制方法計算量較大且對于車輛行駛狀態參數要完全獲知,難以在實際車輛能量管理中加以應用。基于規則的控制策略一般通過啟發式方法進行控制,其規則設置簡便且易于實現。因此,混合動力汽車一般采用基于規則的控制策略,其中以電力輔助控制策略(EACS)最常見。但該策略需對很多車輛狀態參數進行標定,整個調優過程耗時較長。為提高并聯式混合動力汽車的燃油經濟性,該文將負載跟隨閾值改變(LTS)的控制策略應用于混合動力汽車進行仿真試驗,并與ECMS和EACS控制策略進行對比,驗證LTS控制策略的有效性。
1 動力系統架構和相關建模
如圖1所示,并聯式混合動力汽車具有電動機和發動機2個作用在單軸上的動力系統,其中電機系統用于驅動后軸,發動機系統連接到前軸。具有3個作用于車輛的動力源,即齒輪箱之后的發動機功率Peg、變速箱之后的電力輔助功率Pmt及制動功率Ph,其中Peg始終為非負值,Ph始終為非正值,Pmt可取任何值,負值對應于再生制動或發動機對電池進行充電。
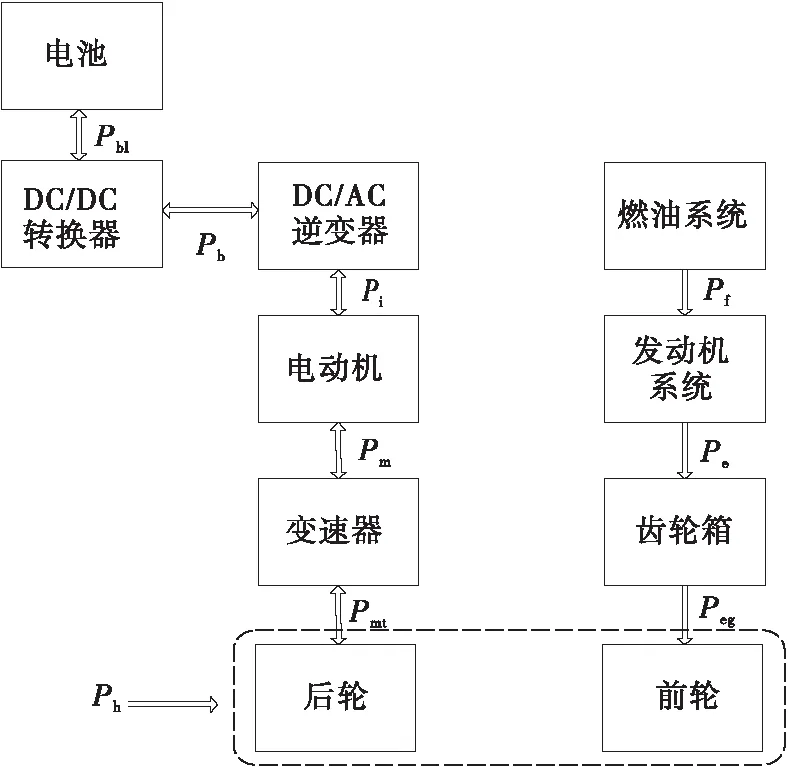
圖1 并聯混合動力汽車的動力總成結構
1.1 發動機動力系統
根據圖1,發動機動力系統由兩部分組成:
(1) 發動機。發動機設置為2 L汽油發動機,峰值功率為120 kW,峰值扭矩為300 N·m,基于發動機轉矩Te和發動機轉速ωe的工作效率見圖2。發動機的燃油消耗率由式(1)計算,發動機提供的機械功率Pe=Teωe。
(1)
式中:mf為燃油消耗;ηe(Te,ωe)為發動機效率;QLHV=44.4 MJ/kg,表示燃油低熱值。
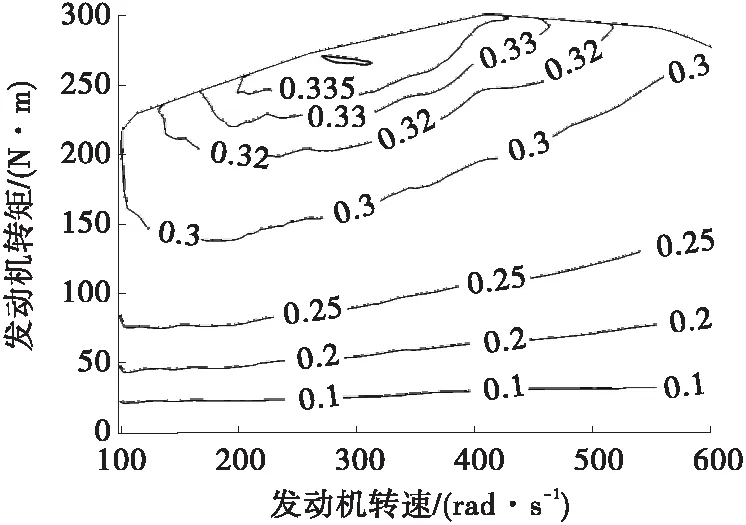
圖2 發動機工作效率圖
(2) 變速箱。以六速自動變速器為例,假定機械效率ηg=0.96為恒定值,有:
Peg=Peηg
(2)
1.2 電力輔助系統
電力輔助系統主要包括電池、DC/DC轉換器、DC/AC逆變器、電機和電機傳動等模塊,對其子模塊分別進行建模。
(1) 電池。混合動力汽車的電池模型使用鋰離子電池,電壓按式(3)計算。根據電池功率Pbl=Vbib,可將電池平均電流ib求解為SOC和Pbl的函數ib(SOC,Pbl)。電池的SOC模型見式(4)。
Vb=Eb-Rbib
(3)
式中:Eb為開路電壓;Rb為內阻;ib為電池的平均電流。
(4)
式中:Qmax為電池最大容量。
(2) DC/DC轉換器和DC/AC逆變器。忽略DC/DC轉換器和DC/AC逆變器的高頻振蕩,并將它們建模為具有恒定效率ηdc=0.96和ηi=0.96的靜態組件,可得:
(5)
(3) 電機。采用三相永磁同步電機,峰值功率為27 kW,扭矩為200 N·m。根據文獻[26-27],電機的效率ηm是關于電機轉矩Tlm和電機轉速ωm的函數(見圖3):
(6)
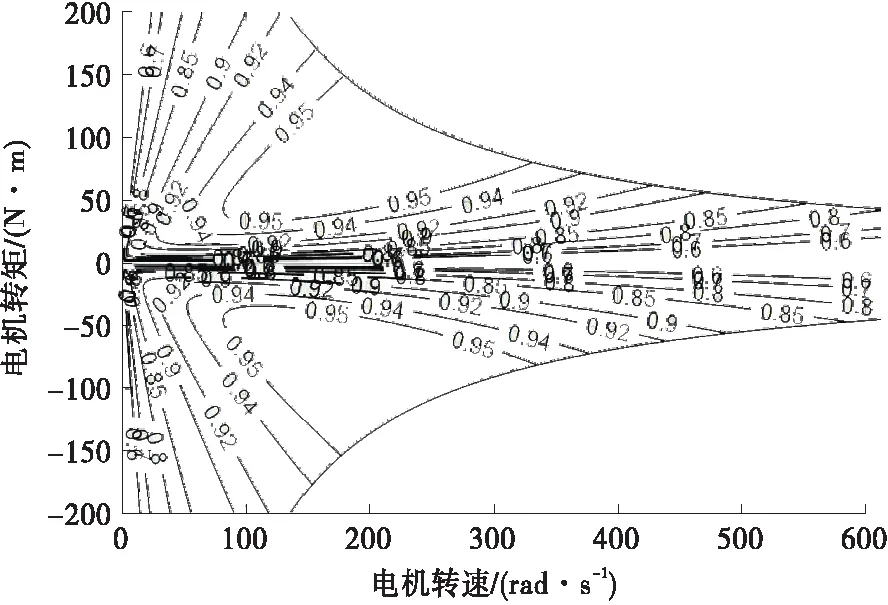
圖3 電機的效率圖
(4) 電機傳動系統。永磁同步電機和混合動力汽車后輪以固定齒輪方式連接,固定齒輪的效率為ηt=0.96,得:
(7)
1.3 車輛動力學模型
根據車輛縱向動力學,縱向驅動力Fv為:
(8)
式中:m為汽車質量;v為車速;Fr為輪胎滾動阻力;Fd為為空氣阻力,Fd=ρv2;ρ為空氣密度。
由給定的車輛縱向動力學方程可計算出所需驅動功率Ppl:
Ppl=Fvv
(9)
驅動功率Ppl也等于發動機功率Peg、電力輔助功率Pmt及制動功率Ph之和,即:
Ppl=Pmt+Peg+Ph
(10)
對于混合動力汽車,機械制動可應用于前輪和后輪,再生制動一般只在連接了電動機的后軸上進行。此外,假設可以恢復2/3的制動功率,剩余的制動功率則由Ph提供。
1.4 系統集成
根據功率傳輸路線,混合動力汽車的功率流由兩部分獨立動力源表示,即u={Peg,Pmt},其表達式如下:
(11)
將式(11)帶入式(1)、式(4),得到包含2個狀態變量的動力學方程:
(12)
2 能量管理控制策略
2.1 等效燃油消耗最小化策略(ECMS)
目前,ECMS控制策略在混合動力汽車上得到廣泛應用,其表達式如下:
(13)
式中:qeq為等效燃油消耗率,按式(14)計算;Sd和Sc為等效因子;Temax為發動機最大扭矩;Pmtmin和Pmtmax分別為電力系統提供的最小、最大功率。
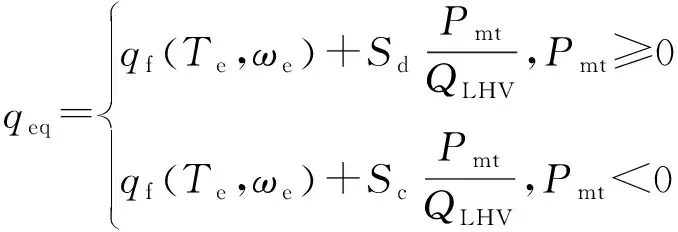
(14)
式中:qf為燃油消耗率,qf=mf。
并聯混合動力汽車的ECMS策略中,每一對(Sd,Sc)決定一個控制映射,該映射確定多個動力源之間的功率分配因數u=Peg/Ppl。圖4為WL-M(中速)和WL-E(超高速)2種行駛循環下最優控制圖,通過最小化每個行駛循環的等效燃油得到。由圖4可知:發動機的激活由驅動載荷功率Ppl和發動機轉速ωe及相對于Ppl的不同閾值共同確定,可在每個控制映射中監測這些變化,從而對發動機的激活時機進行控制。
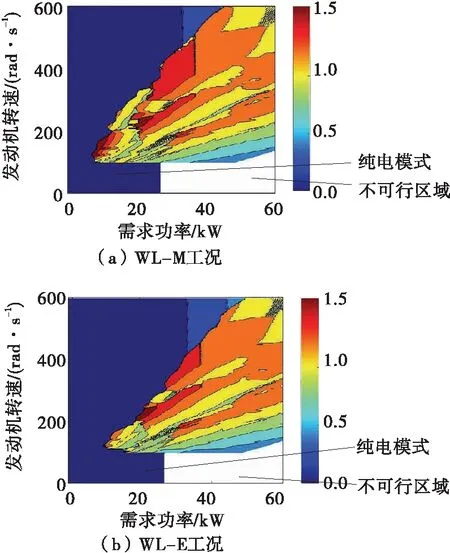
圖4 WL-M和WL-E工況下最優控制圖
2.2 電力輔助控制策略(EACS)
EACS控制策略是一種常見的基于規則的控制策略,采用負載跟隨和閾值改變的方法對混合動力汽車動力系統的能量進行管理。一般以發動機作為主要動力源,電力作為輔助動力源。當發動機工作效率低下或功率需求超過發動機最大功率時,發動機與電池同時工作。當SOC下降到一定水平時,發動機會產生額外的能量給電池充電[見式(15)]。EACS的控制規則見圖5。
(15)
式中:chrgfrac為電池電荷狀態SOC較低時發動機的額外充電功率。
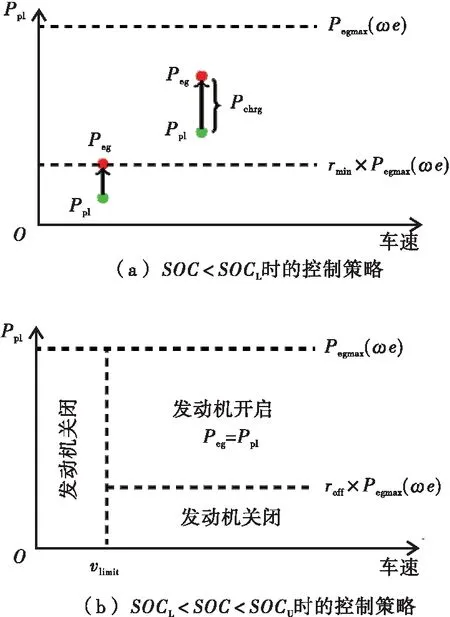
圖5 EACS的工作模式
2.3 負載功率跟隨閾值改變策略(LTS)
LTS控制策略基于閾值變化機制和負荷跟隨方法進行設計,可與SOC保持成比例的微小偏差。功率閾值為:
(16)
式中:Pth為待定參數;SOCL和ωL分別為電池最小荷電狀態和發動機最小轉速。
功率閾值取決于SOC和發動機轉速,式(16)中等號右邊第二項是由ECMS生成的控制驅動,可有效提高發動機的工作效率。Xrange=(XU-XL)/2,其中XU為最大電池荷電狀態SOCU或發動機最大轉速ωU。
在LTS控制策略中,功率需求Ppl≥Pegmin時,將激活發動機,并利用功率負載跟隨方法以較小的偏差進行工作[見式(17)]。因此,LTS有3個參數(Pth,Pω,Pch)需要調優,其運行規則見圖6。選取ωe=ωmidSOC=SOCmid兩個時刻,SOC、ωe和Ppl的相關情況見圖6,其中ωmid=(ωU+ωL)/2。
Pd=Ppl+Pch(SOCmid-SOC)
(17)
式中:Pch≥0且為可調參數;SOCmid為期望的電池荷電狀態值,SOCmid=(SOCU+SOCL)/2。
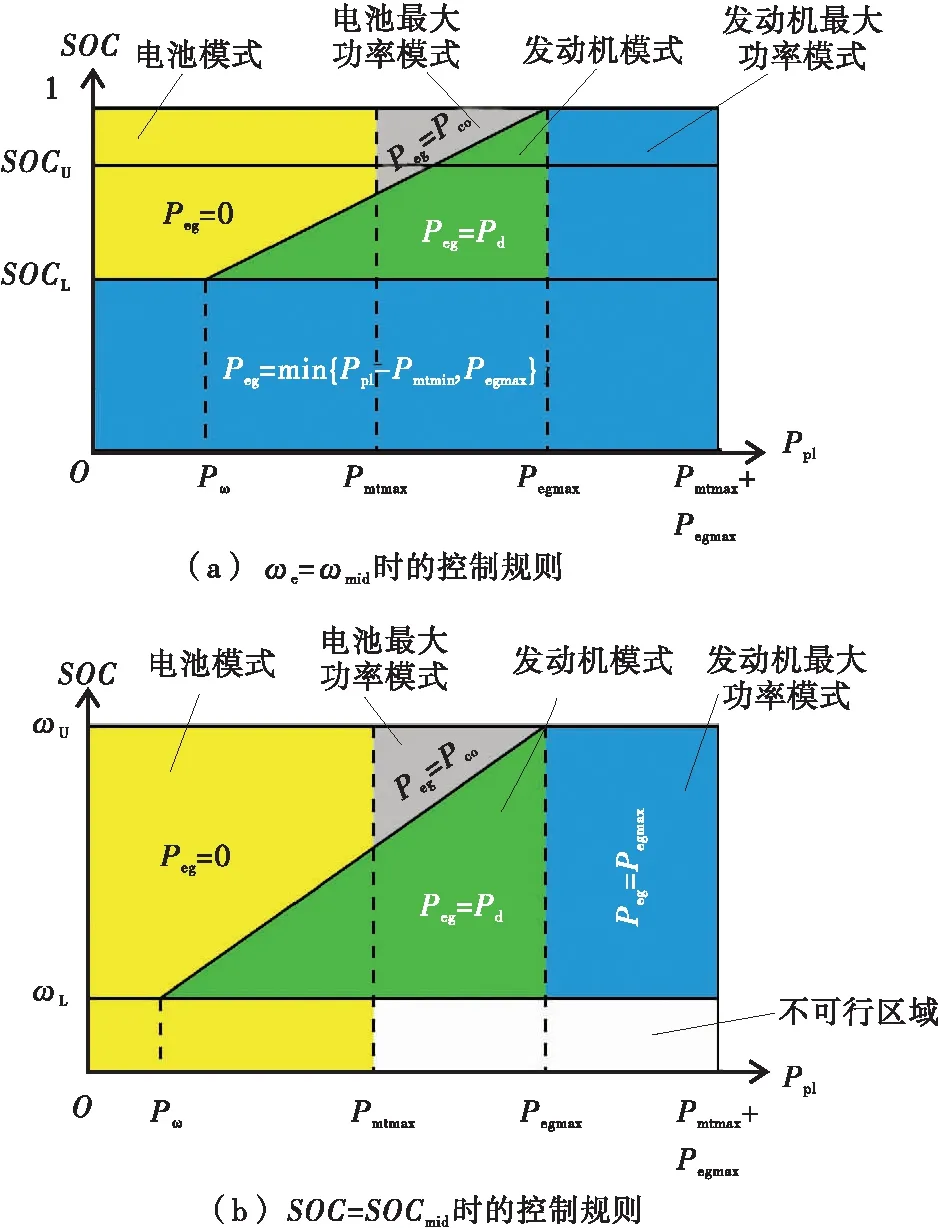
Pegmax和Pmtmax分別為發動機和電機模塊傳遞的最大功率
3 仿真驗證及相關分析
將LTS、ECMS、EACS控制策略與并聯式混合動力汽車模型結合,對比分析3種控制策略的性能。根據全球統一的輕型車輛測試程序(WLTP),在低速(WL-L)、中速(WL-M)、高速(WL-H)和超高速(WL-E)工況下進行仿真測試,不同工況下車速分布見圖7。
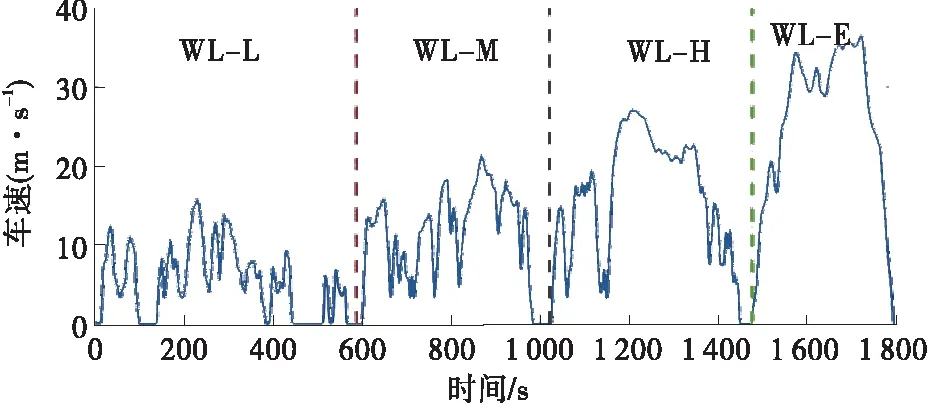
圖7 WLTP在4個不同階段的速度分布
為評價各控制策略的燃油經濟性,對實際燃油消耗和電池充電消耗均采用統一的規則:
(18)
式中:Sd,efc和Sc,efc為等效系數,根據文獻[28]中折線圖方法計算得到,其值見表1;ΔSOC=SOCinitial-SOCfinal。
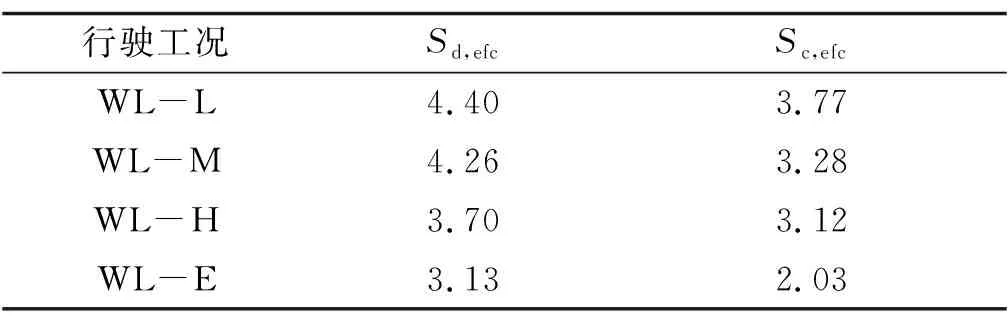
表1 等效系數計算結果
通過最小化等效燃油消耗mefc可得到3種控制策略在不同工況下的性能最優值(見表2)。由表2可知:LTS控制策略無論在燃油經濟性還是在電池運行狀態方面都具有最佳的性能表現。在燃油經濟性方面,LTS控制策略優于EACS控制策略3.1%~10.4%,優于ECMS控制策略2.5%~5.7%。在SOC方面,LTS控制策略可使SOC值保持在60%以上,電池運行處于較好狀態。
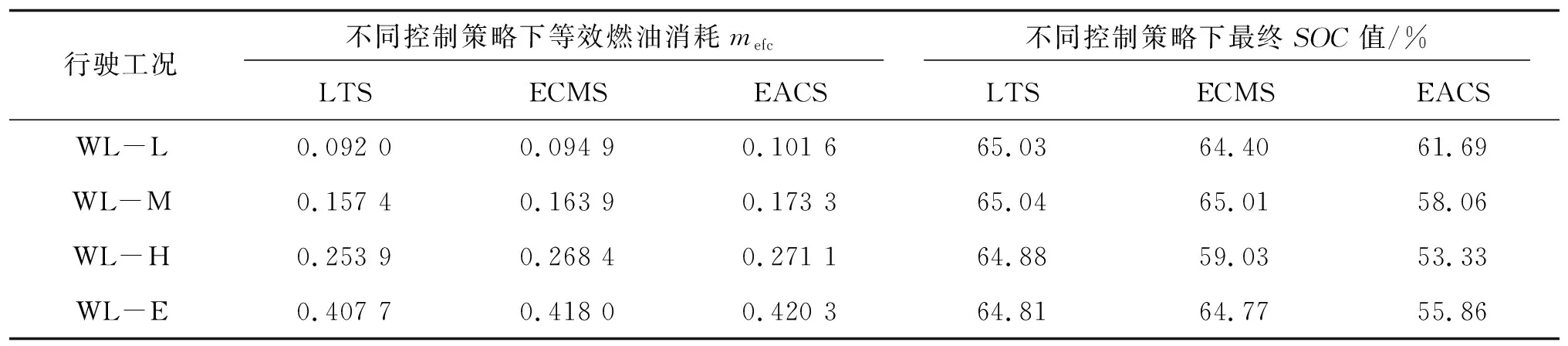
表2 不同控制策略下等效燃油消耗mefc及最終SOC值
由于電機功率在給定發動機功率時是確定的,僅輸出相關發動機功率分布,圖8為不同控制策略下驅動功率情況。由圖8可知:3種控制策略都是在低功率負載情況下使用純電動模式,當驅動負載功率需求較高時,激活發動機驅動模式。對于ECMS和LTS控制策略,發動機通常提供比所需驅動負載更多的功率,并且超出的功率存儲在電池中以備后續使用,而EACS不直接使用發動機為電池充電,除非電池達到SOC下限。另外,在WL-L和WL-M工況下,LTS和ECMS控制策略下發動機的激活時間較相似,但在WL-H和WL-E工況下,LTS會更頻繁地激活發動機模式,保證混合動力汽車具有較好的動力性能。EACS控制策略雖然采用負載跟隨模式,但電池充電主要依靠再生制動,如果沒有足夠的再生制動來源,則EACS難以實現電池荷電狀態平衡。
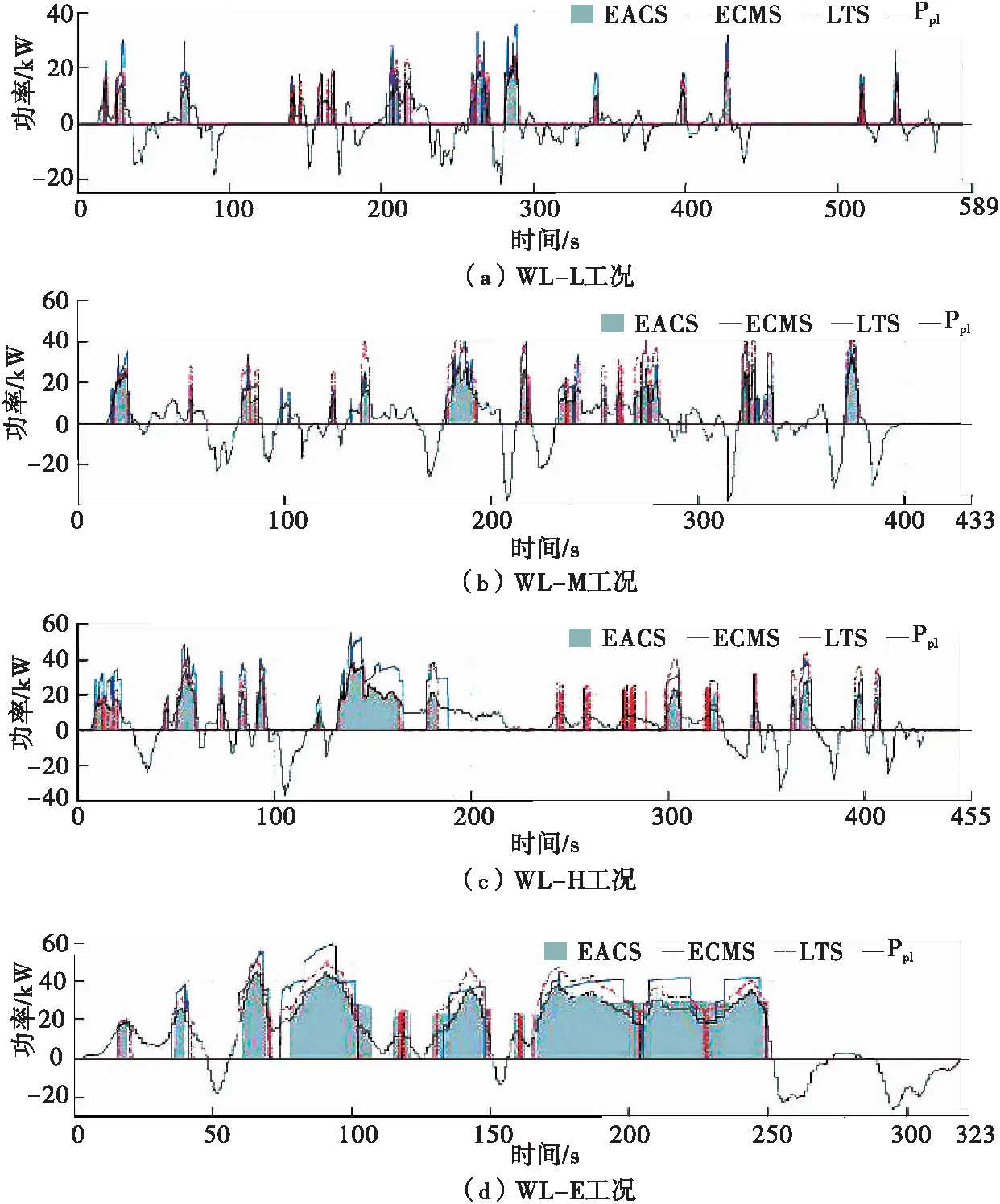
圖8 4種工況下發動機功率和需求功率情況
3種控制策略下SOC分布見圖9。由圖9可知:除WL-H工況外,其余3種工況下LTS控制策略和ECMS控制策略的SOC分布較相似,進一步表明LTS控制策略的有效性。對于EACS控制策略,由于負載跟隨機制和再生制動有限,無法在所有驅動循環中實現電池荷電狀態平衡。從保證電池穩定運行的角度來看,LTS控制策略具有與ECMS類似的性能,并顯著優于EACS。
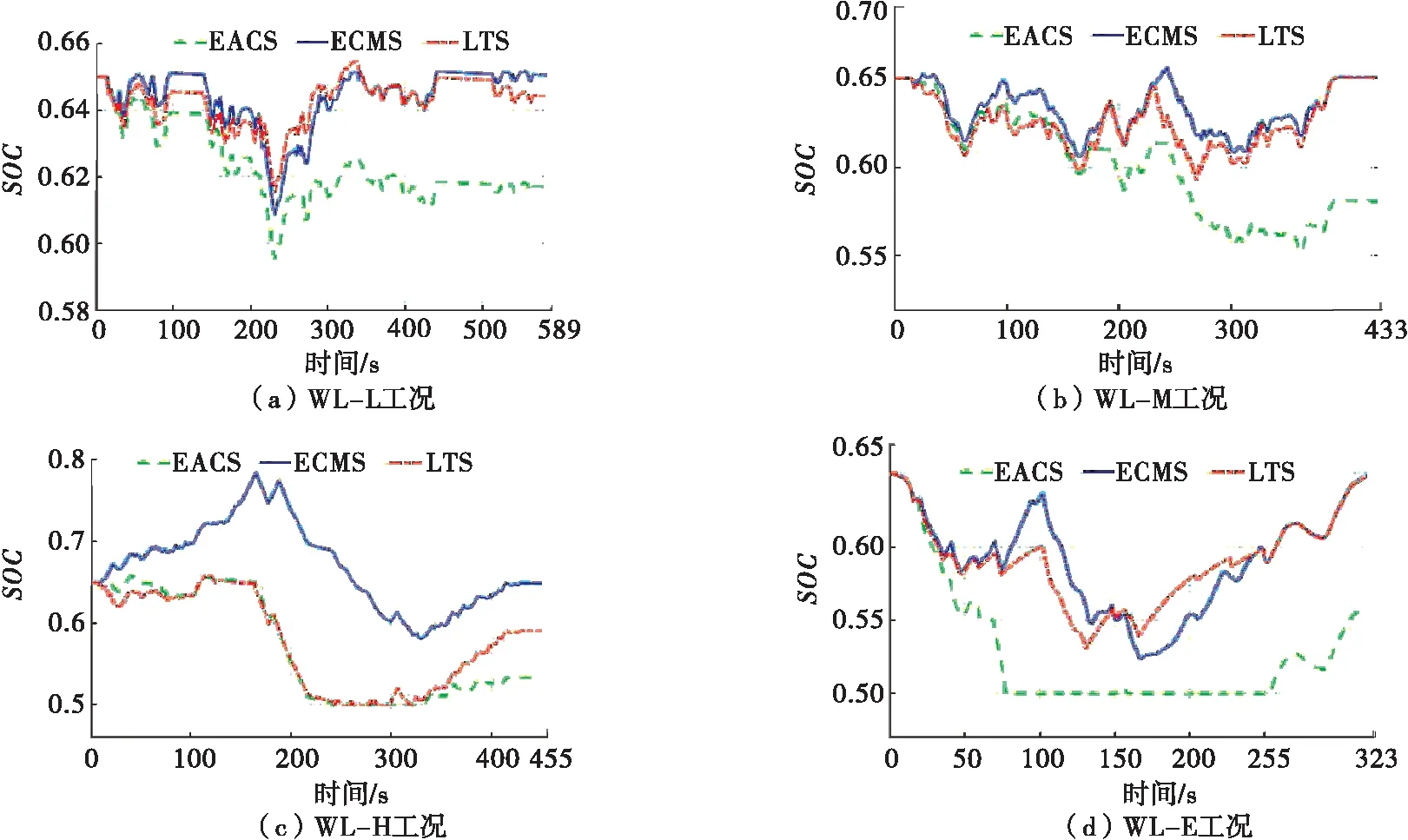
圖9 3種不同控制策略下SOC曲線
4 結論
針對混合動力汽車的能量管理控制,采用負載跟隨閾值改變的方法設計一種能兼顧汽車燃油經濟性和電池荷電狀態的能量管理控制策略LTS;針對控制實時性的需要,采用簡化調優的方式對設計規則進行改進;最后設計相關仿真測試,與傳統的ECMS和EACS控制策略進行對比,驗證所提出方法的有效性。結論如下:1) LTS控制策略設計規則簡便、高效,在燃油經濟性和電池電荷狀態平衡方面均優于EACS策控制策略。2) 雖然LTS控制策略在燃油經濟性方面與ECMS控制策略差距不大,但易于在車輛上實現且能使電池保持穩定運行狀態,綜合性能優于ECMS。3) 考慮到LTS控制策略尚不能實現在多種工況下均保持有效性,后續研究中將進一步對LTS進行改進,解決其在部分工況下燃油經濟性改善程度不高的問題。
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
通信電源技術(2016年1期)2016-04-16 04:57:26
汽車與新動力(2015年1期)2015-02-27 12:11:01
決策探索(2014年21期)2014-11-25 12:29:50
汽車與新動力(2013年5期)2013-03-11 16:08:17
