水利水電工程耙斗清污研究與應用
2021-07-29 08:13:50陳佛生
廣東水利水電 2021年7期
陳佛生
(廣東江海機電工程有限公司,廣東 廣州 510500)
1 概述
水資源是綠色資源,廣泛應用于水利水電等行業。我國在水資源利用方面已取得巨大成績,但是水資源利用過程中還存在污物堆積所引起的效益損失[1-2]、安全隱患、環境污染等問題,如水利水電工程攔污柵前污物的堆積,不但容易引起水頭損失,還給攔污柵及機組運行帶來嚴重安全隱患。目前使用的耙斗式清污機,普遍存在耙斗對污物的適應性差和清污效果不好的問題。
2 水利水電工程污物特點及清理方法研究
2.1 針對污物多樣性、形狀及堆積狀態不規則特點的解決方法
開放式的水資源利用工程中,其水流距離較長,區域多樣,流動過程中匯集了泥沙、雜物、樹干、樹根、石塊、動物尸體、城市垃圾等各種各樣,形狀毫無規則的污物。在復雜的水流流態、流速等因素的共同作用下,在攔污柵前形成毫無規則的堆積。
解決方案:一種是加大耙斗開度,耙斗在打開狀態下,一定范圍內的污物能被耙斗耙起來。耙斗的開度越大,對污物的不規則形狀、堆積狀態適應性越強,水流方向上越大范圍內的污物被耙起;另一種方法為夾拉法,是耙斗先夾住污物,然后通過提升耙斗將污物拉起,該方法需提高耙斗的夾污能力并設置相匹配的啟閉力。實際工程中兩種方法綜合應用,可以取得更好效果。
2.2 針對污物布置不均勻特點的解決方法
由于水具有流動特性,進水口攔污柵前不同位置的水流狀態和流速不同,造成不同位置污物堆積的數量和種類各不相同,有的地方多,有地方少。在調研過程中發現,不僅僅是水面污物,水下污物同樣存在布置不均勻的現象。
污物分布不均勻的問題可利用手抓物體的原理解決。人在抓物體時,拇指與另外4個手指之間會因為物體的形狀、大小、多少有不同的張開度,抓住物體后,所有的手指都與拇指一起對物體施加壓力(抓力),每個手指不需要同步抓放、都可以獨立壓緊物體的對應部位。手抓物體的特點可以指導清污機耙斗的設計,如設計液壓耙斗時,可將耙斗設計成動耙和定耙,定耙作用類似于拇指,動耙分段,作用類似于其余手指,每段動耙相互不關聯。
2.3 針對水下污物不可見特點的解決方法
除了水面上的漂浮物外,由于污物的密度各不相同,水流通常還攜帶一些半漂浮物和沉潛污物,污物被阻攔后堆積在水面以下,因此,看似干凈的水面,其實在下面堆積了大量的污物。
水下污物的不可見性會導致駕駛員無法觀察污物的分布情況,容易給操作帶來安全隱患。特別是在分段式清污中,由于1次清污寬度小于孔口寬度,如果在同一清污段內,污物一端多、一端少,污物堆積高的一端必然先阻礙對應端的耙斗下降,位于污物堆積低的一端耙斗則繼續下降,將失去平衡,容易導致側翻,存在較大安全隱患。
有三種方法可以解決因水下污物不可見而引起的操作安全問題:一種是探索在耙斗上安裝設攝像頭,攝像頭可以將水下污物的分布情況動態傳輸至操作控制室;另一種方法是通過設置荷重傳感器防止失去平衡的耙斗繼續下降,即在耙斗的起升機構中設置具有欠載(松繩)和超載保護功能的荷重傳感器[3]及報警裝置,當起升鋼絲繩出現拉力較小或松繩現象時,能停止下降,出現超載現象時,停止提升;第三種方法是采用全跨清污。在全跨清污中,由于1次清污寬度與孔口等寬,耙斗能1次清理與孔口等寬的污物,同時由于全跨清污中設有耙斗槽和耙斗的側向定位裝置,可以保證耙斗不會發生翻轉。
2.4 針對污物密實性特點的解決方法
攔污柵前的水流具有較大的動能,可將污物緊緊地壓在攔污柵上,如果污物不能得到及時清理,堆積的污物會越來越多,在長時間的水流沖擊下、不同污物相互穿插,形成密實的結構,并且產生較大的豎向穩定性和承載力,可通過提高耙斗插入污物的能力解決。
衡量耙斗插入污物能力的指標是單位耙齒對污物施加的插入壓強。可以從兩方面提高耙斗插入污物的壓強。一方面是加大耙齒所受壓力,另一方面是減小接觸面積。
1)如何加大耙齒所受的壓力
有兩種方法可以加大耙齒所受的壓力,一種是加大耙斗的重量,另一種是設置耙斗增力裝置。
在耙斗重量方面,自重越大,越有利于插入污物,但加大耙斗重量必然會增加清污機及相關部分的造價,應綜合考慮清污效果和設備投資。設計時,耙斗自重應根據工程的類別、清污操作特性和水流狀態不同而有所區別。在水流速度較小、以城市垃圾為主的泵站等工程,建議耙斗每米重量所產生的有效下插分力控制在12~18 kN之間,對于動水清污的水電站工程,建議每米有效下插分力控制在20~25 kN之間,水流速度大的宜取大值。
在設置耙斗增力裝置方面,可以在耙斗的定耙上設置可伸縮的活動耙齒和液壓增力裝置[4],清污作業時,待耙斗下降至合適的位置后,操縱液壓裝置夾緊攔污柵或者頂住水工建筑物,然后通過操縱液壓系統來推動伸縮耙齒插入污物,但這種方法存在損壞攔污柵或水工建筑物的風險,有一定爭議。
2)如何減小接觸面積
從兩方面可以減小接觸面積,一方面是減小耙齒在污物堆積面上的投影面積,通常是通過調整耙斗的入水角度實現,入水角度越接近90°,插入污物的性能越好。另一方面是設計合理的耙齒結構。
3 一種液壓耙斗的研制實例[5]
根據以上研究思路,為保證足夠的抓污圧污能力,選用液壓耙斗[6-8],應用手抓物體的原理,設計一種動耙分段式液壓耙斗。設計前,應根據1次清污寬度的要求,對動耙進行分段,下面以長度為4.6 m(1次清污寬度)的耙斗進行說明。
3.1 機械結構
液壓耙斗包括1組整體定耙及安裝在其上的行走及導向系統、若干段動耙、開合機構液壓系統和開合機構液壓油缸[9-10](如圖1所示)。

圖1 分段動耙液壓耙斗結構及運行示意
按每段長1.5 m將耙斗動耙分成3段,每段動耙上設置1條開合液壓油缸,動耙通過連接座與定耙形成鉸接結構,開合機構液壓油缸的油缸端與定耙鉸接,活塞桿端與動耙鉸接。為保證清污效果,耙斗自重應大于100 kN。如圖1所示的液壓耙斗應用于攔污柵安裝傾角為75°的工程,開耙下降過程中,定耙與攔污柵柵面平行,動耙具有86°的入水角度。
3.2 開合機構液壓系統[10-11]
與圖1對應的液壓系統如圖2所示,其控制邏輯是液壓油通過齒輪油泵和單向閥加壓后,經中位機能為“M”型[12]的電磁換向閥直接進入每段動耙的液壓油缸。液壓油進入液壓油缸的先后順序及多少由油路阻力和液壓油缸的背壓所決定,油路阻力小或液壓油缸背壓較小的優先進入,反之后面進入。當其中的一個動耙抓取較大或較多污物時,液壓油缸伸出量較小,壓縮污物后其背壓增大,液壓油停止或減少進入,更多的液壓油進入其他背壓較小的液壓油缸,使未壓緊污物的動耙上的液壓油缸繼續伸出,直至耙斗壓緊污物,然后通過電接點壓力表[13]和溢流閥調節,最終使所有的液壓油缸壓力平衡并達到設定壓力,電磁換向閥回到中位,電動機停止工作。耙斗閉合過程中不需要任何人為干預,每段動耙的開度大小完全依賴于耙斗對污物形狀、大小和布置的感應,通過液壓系統實現自我調節和適應。
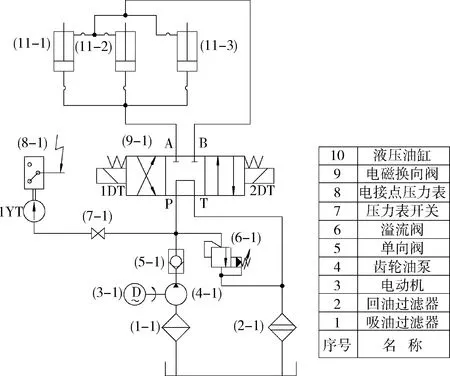
圖2 分段動耙液壓耙斗液壓原理示意
3.3 清污耙齒[14]
耙斗的耙齒是耙斗與污物最早接觸的部位,其結構和形狀會影響耙斗插入污物的能力和使用與維護的方便性。
為了提高耙齒的插入能力和維護的方便性,研制了一種新型的組合式耙齒。組合式耙齒主要包括耙齒、耙齒防轉裝置、耙齒安裝架、螺母和彈簧墊圈等(如圖3所示)。其中的耙齒由圓鋼與鋼板焊接而成,圓鋼的頭部加工成圓錐體,以減小與污物的接觸面積,提高插入污物的能力。整個耙齒通過螺紋連接安裝在耙齒連接架上,耙齒連接架與動耙或定耙的主體結構焊接,提高其維護的便利性。
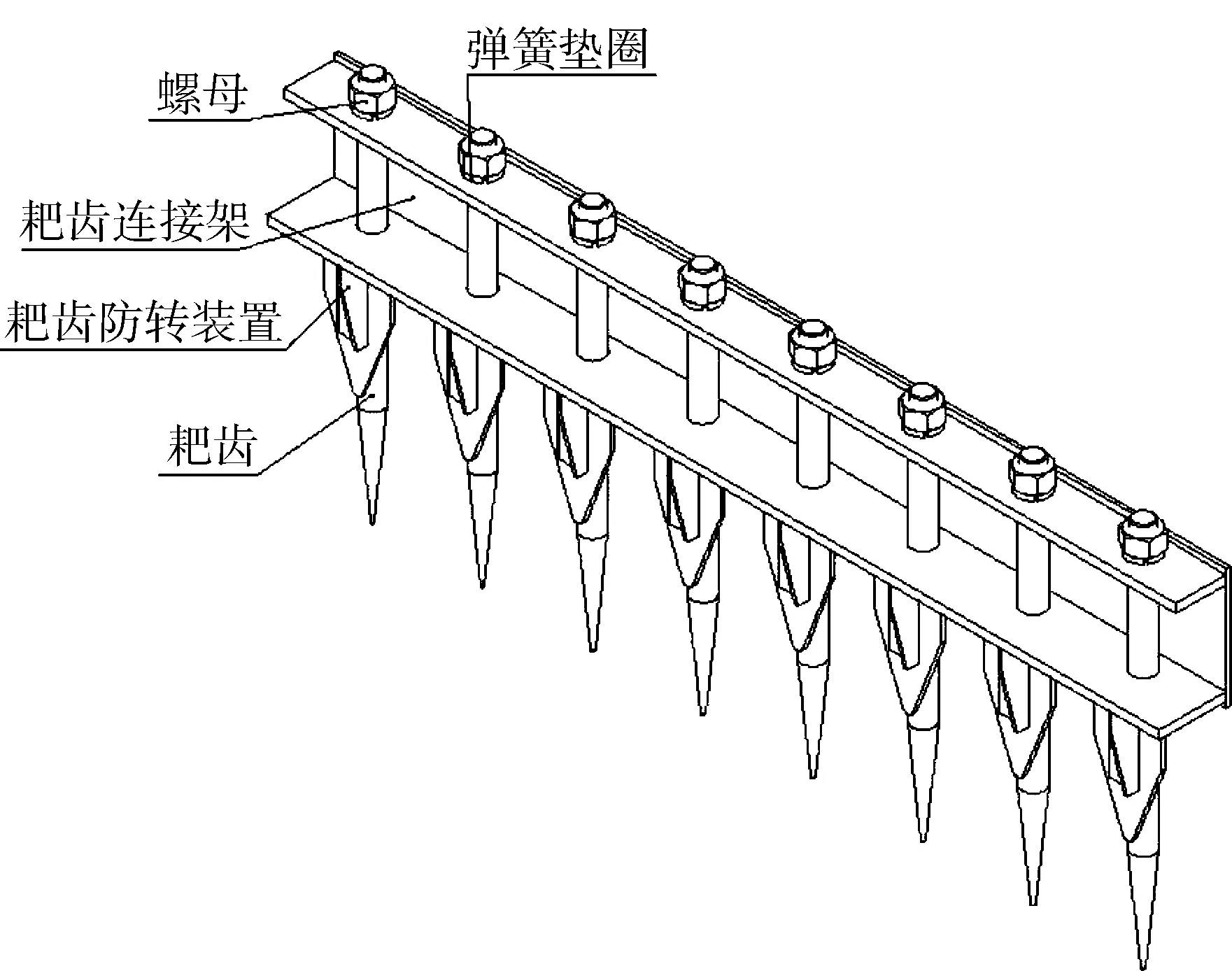
圖3 耙齒安裝示意
3.4 清污效果
設計過程中,利用三維實體建模軟件調節耙斗的開度和入水角度,使所研制的液壓耙斗具有抓污圧污能力強、污物適應性強和插入污物能力強等特點。所研制的分段動耙式液壓耙斗已應用于樂昌市張灘閘壩樞紐重建工程和蓬辣灘水電站清污機改造等數10個工程中,均取得了很好的清污效果(如圖4所示)。

圖4 液壓耙斗開度及清污效果示意
4 結語
當前的耙斗式清污機大多依賴于固定的行走軌道,只能清理攔污柵前很小范圍內的污物,存在靈活性差、清污效率不高等缺點。在設計耙斗式清污機時,建議考慮以下幾個方面:
1)為了獲得較大的抓污圧污能力,宜選擇液壓耙斗。
2)為了適應污物的多樣性、形狀、結構及堆積的不規則性,盡可能擴大耙斗的開度。
3)為了更好適應污物分布不均的情況,耙斗動耙宜為多段式,每段允許有不同的開度且能獨立施加壓力。
4)為了提高耙斗的插入性能,需合理設置耙齒的結構和設計耙斗合理的入水角度。
5)清污機除了設置合理的耙斗外,為保證操作安全,應與其型式、起升機構荷重保護等綜合考慮。