無堤防河段河道管理范圍劃定技術分析
2021-07-29 08:13:56秦美茵孫秀峰張飛龍鐘小陽
廣東水利水電 2021年7期
秦美茵,孫秀峰,張飛龍,鐘小陽
(1.廣東省水利水電科學研究院,廣東 廣州 510635;(2.中山大學 土木工程學院,廣東 珠海 519000)
1 概述
廣東省河流眾多,以珠江流域及獨流入海的韓江流域和粵東沿海、粵西沿海諸河為主,集水面積占全省面積的99.8%,其余屬于長江流域的鄱陽湖和洞庭湖水系。全省流域面積在100 km2以上的各級干支流共614條。由于歷史原因,許多地區河湖管理范圍邊界不清,侵占河湖、破壞河湖問題時有發生,嚴重影響河湖生態空間管控。依法劃定河湖管理范圍,明確管理邊界線,是加強河湖管理的基礎性工作,也是《水法》《防洪法》《河道管理條例》等法律法規作出的規定,更是中央全面推行河長制湖長制明確的任務要求。據測算,肇慶市德慶縣50 km2以上河道總長為359 km,其中無堤河段總長為238 km,占比66%,在河道管理范圍劃定工作中,無堤河段易受地形、岸坡植被、建筑物等影響,是劃界工作的重難點。
針對河道管理范圍劃定任務,國內學者開展了大量的研究工作。在技術應用方面,歐陽顯良等[1]探索無人機航測技術在中小河流劃界中的應用,認為該技術可獲得測區立體像對、高分辨率三維點云數據和正射影像圖,可較清晰地識別堤腳線等河道管理范圍的起算線;夏祖偉等[2]結合正射影像光譜信息豐富、地面分辨率高的特點,提出一種融合激光雷達點云和正射影像的管理與保護范圍線提取方法;殷丹[3]提出將ArcGIS應用于有堤河段和有規劃設計資料無堤河段管理范圍劃界工作中;李青林等[4]提出應用奧維互動地圖提高河湖和水利工程管理范圍劃界工作效率。但以上技術應用研究多集中于有堤河段管理范圍劃定,而山區中小河流大部分為無堤河段,針對無規劃設計資料的無堤河段,曹均昌[5]以紅柳河和新橋水庫為例就劃界過程中洪水分析計算進行探討;趙巨偉[6]針對無堤河段劃界,提出基于洪水分析計算的技術流程,并結合遼寧省丹東市草河劃界案例,剖析了無堤段劃界的實施過程和技術要點;羅姍姍等[7]以貴州省某河道劃界案例,在開展測量工作的基礎上分析了無堤河段劃界技術流程;以上無堤防河段管理范圍劃定研究多著重于洪水分析部分,鮮有將上述技術結合應用,劃界成果精度及生產效率有待提高,本文以德慶縣悅城河為例,結合無人機航測、無人船斷面測量技術,剖析無堤防河段管理范圍劃定的實施流程和技術方法,提出無堤河段設計水位與岸坡交線自動化快速生成技術方案,以供技術人員交流和參考。
2 流域概況
悅誠河屬西江一級支流,發源于德慶禾叉頂,流經古有、莫村、永豐、播植、悅城等鄉鎮,于悅城鎮注入西江。悅城河全長為82 km,集雨面積為877 km2,其中有43.4 km2由廣寧縣流入,9.97 km由高要市流入,總落差為798 m,平均坡降為1.62‰,多年平均流量為1.1 m3/s;流經德慶縣河長為66.61 km,河口位于德慶縣悅城鎮。流域水系見圖1所示。
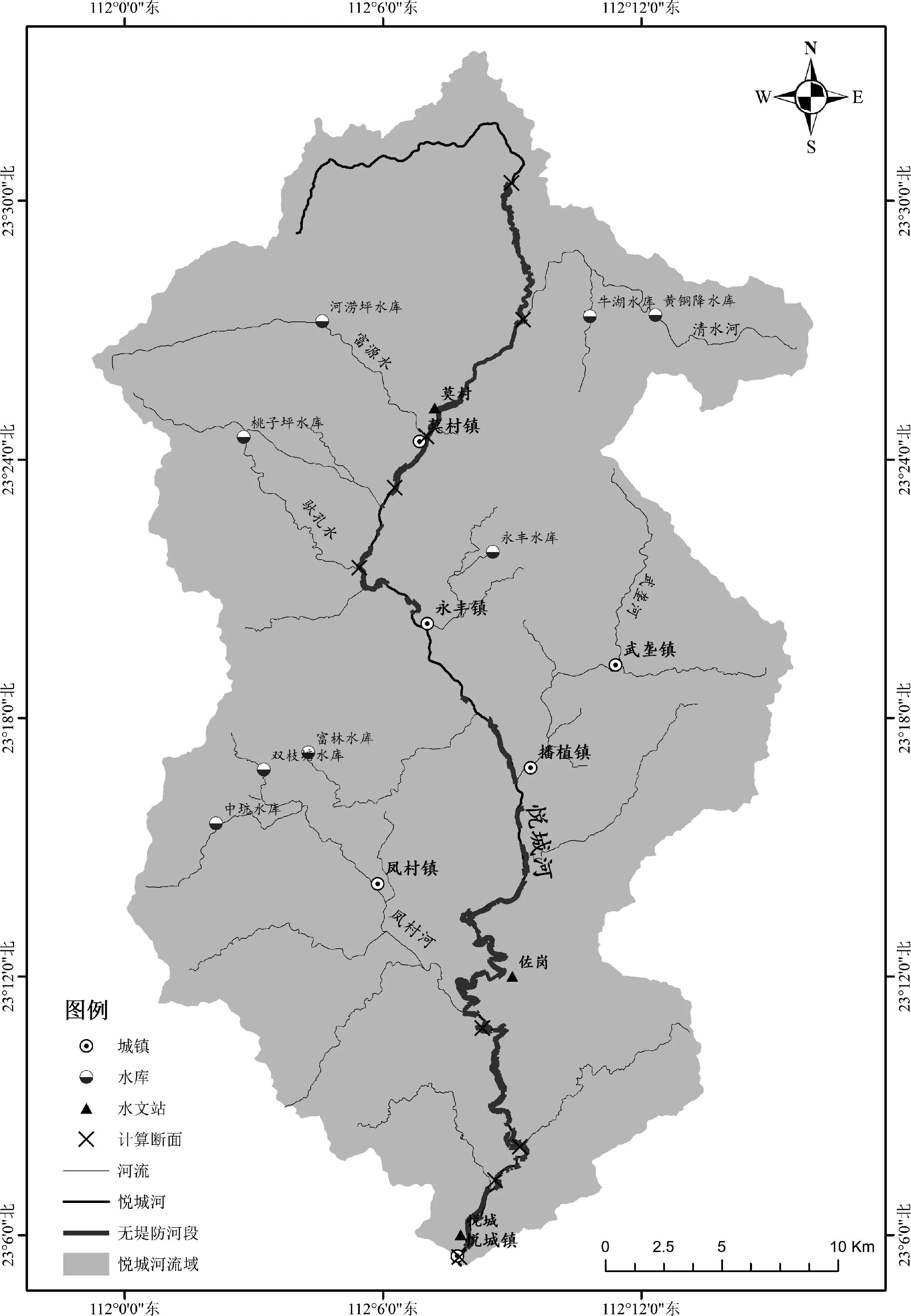
圖1 悅城河流域水系示意
3 劃界技術流程
3.1 資料收集與分析
對劃界河道開展調研工作,收集河道相關規劃設計資料、水利工程設計報告、河道所在流域水文站系列資料等,并對所采用的資料進行合理性分析。
3.2 無人機航測
對劃界河段進行無人機航測,航測作業開展前,首先通過現場調研及資料收集情況確定航測范圍;然后利用TY-3垂起型航測無人機搭載LIDAR航拍系統,根據預先確定的航攝范圍,執行航測外業作業和像控布設;通過內業數據處理計算,獲得劃界河段三維點云數據、1:2 000數字高程模型、1:2 000正射影像數據等工作底圖。
3.3 無人船河道斷面測量
采用基于網絡RTK技術的無人船測量系統進行水下地形測量,由千尋CORS、船載GNSS和便攜式電腦組成導航定位系統進行定位導航,采用船載測深儀自動采集水深,后借助專業數據處理軟件和繪圖工具進行數據內業處理,獲取1:500河道斷面數據。
3.4 設計洪水分析計算
基于河道斷面測量成果,采用水文比擬法、綜合單位線法和新推理公式法3種方法計算設計洪水。現有設計資料可靠的河段,直接采用現有洪峰流量成果,或采用水文比擬法計算設計洪水;無可靠設計資料的河段采用綜合單位線法和新推理公式法分別進行計算,并協調兩種方法算得的洪峰流量值相差不超過20%,然后選用綜合單位線法計算成果[8-9]。
3.5 確定管理區邊界
利用已有設計水位成果或建立河道一維數學模型推算劃界河段設計水位;利用Arcgis生成設計水位與岸坡交線并結合人工目視解譯獲得無堤河段管理范圍基準線;然后根據劃界標準,分河段緩沖分析得到管理區邊界。
4 技術和方法
4.1 無人機航測
1)外業航拍
外業航拍需對攝區的地點及設施進行現場勘察和調研,選擇攝區最有利的氣象條件,并要盡可能的避免或減少地表植被和其他覆蓋物對攝影和測圖的不良影響,確保航攝像片能夠真實地顯現地面細部。在避開航攝范圍內高壓電力線和軍民航空器的前提下,保證航攝飛行路線的直線性,并把項目區分成若干測段,每一測段再分為若干航帶。在航攝飛行中盡量保持飛機姿態的平穩,轉彎半徑要大,飛機傾斜角不得大于15°,以防止GPS信號失鎖。
2)像控測量
在完成一定區域范圍的航攝,解算出影像數據后,即開始選取控制點、刺點的工作。采用千尋網連續運行參考站系統(CORS)作為測區控制系統參考,利用1個或若干個固定的、連續運行的GPS參考站,實時自動地提供經過檢驗的GPS觀測值、各種改正數、狀態信息。通過RTK獲得測區的平面坐標信息,即國家2 000坐標系統。采用RTK獲得大地高程數據,通過獲得的RTK數據經過廣東省地理信息中心的后期結算,獲得測區準確的國家85高程系統下的像控點數據。
3)內業處理
對外業航拍及像控測量數據進行內業計算處理,獲得劃界河段三維點云數據、1:2 000數字高程模型(DEM)、1:2 000正射影像(DOM)數據等工作底圖,悅城河某河段DEM及DOM成果示意分別見圖2~3。

圖2 悅城河某河段DEM成果示意

圖3 悅城河某河段DOM成果示意
4.2 無人船河道斷面測量
1)導航定位
啟動測量軟件,按軟件提示設定記錄間隔、船速檔位、通訊ip、船只吃水等,由導航人員引導測量船至測區后開始作業,計算機實時采集定位、水深等數據,顯示到圖形界面。測量采用手動自動相結合的測量模式,測量數據的記錄間隔按1 s/點,實現導航、定位、數據采集自動化。作業過程中測量人員實時觀察RTK流動站的衛星信號鎖定、固定解情況。
2)外業測量
水深外業測量采用船載測深儀自動采集,測量精度0.1%h。無人船的測量數據由無人船傳輸天線通過網橋傳輸到地面工作站中,無人船在工作中可以通過地面工作站和遙控器進行控制。測深過程中,測量人員通過電臺實時查看測深數據,及時調整航速,使測深數據保持穩定、可靠[10]。
3)內業處理
數據內業處理分為數據預處理、數據改正和數據檢查,主要是借助專業數據處理軟件和繪圖工具進行數據處理。其中數據預處理主要包括定位中心與測深中心的偏心改正、水深點采集時間延時檢測、對定位數據進行數據異常值檢測及修正以及水深數據異常值檢測及修正;數據改正主要包括水深數據的吃水改正、聲速改正和水位改正;數據檢查主要包括制作圖件,并采用等深線圖示法及三維顯示法對圖件中存在的殘留異常值進行修正,最后輸出成果、制作成果圖件,斷面測量成果見圖4。
圖4 無人船河道斷面測量成果示意
4.3 設計洪水分析計算
現有設計資料可靠的河段,直接采用現有洪峰流量成果,或采用水文比擬法計算設計洪水;無設計資料的河段,采用綜合單位線法和推理公式法分別計算劃界河段各頻率設計洪水成果,并協調兩種方法算得的洪峰流量值相差不超過20%,然后選用綜合單位線法計算成果,悅城河設計洪水計算結果見表1。
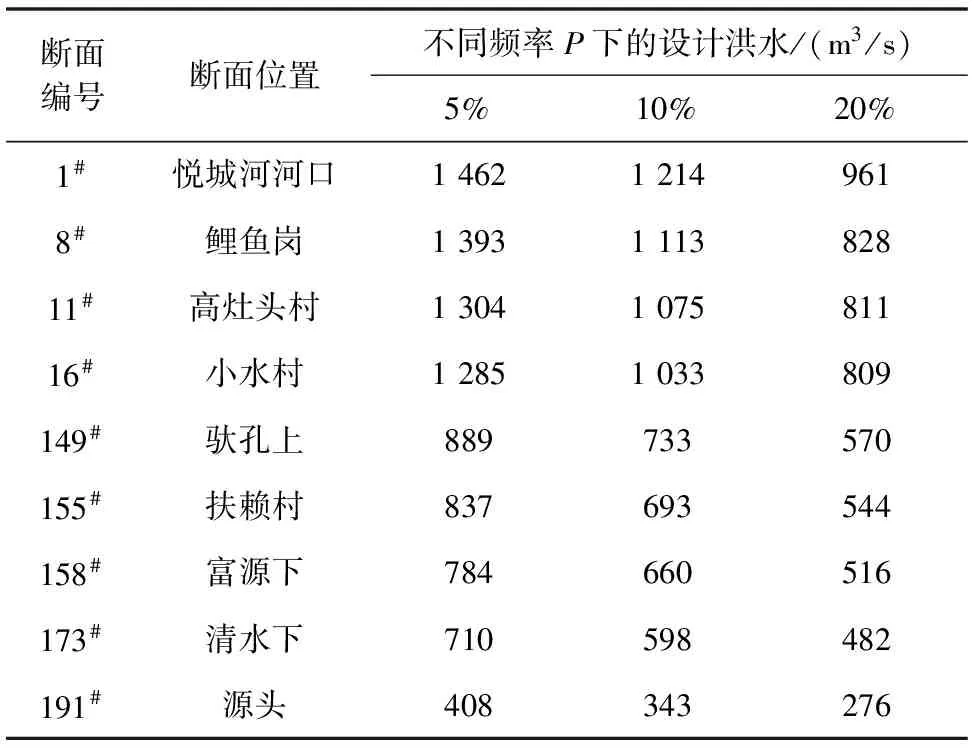
表1 悅城河設計洪水計算結果
4.4 設計水位計算
獲得設計洪水計算結果后,建立河道一維數學模型推算悅城河設計水位[11-12],計算結果見表2。
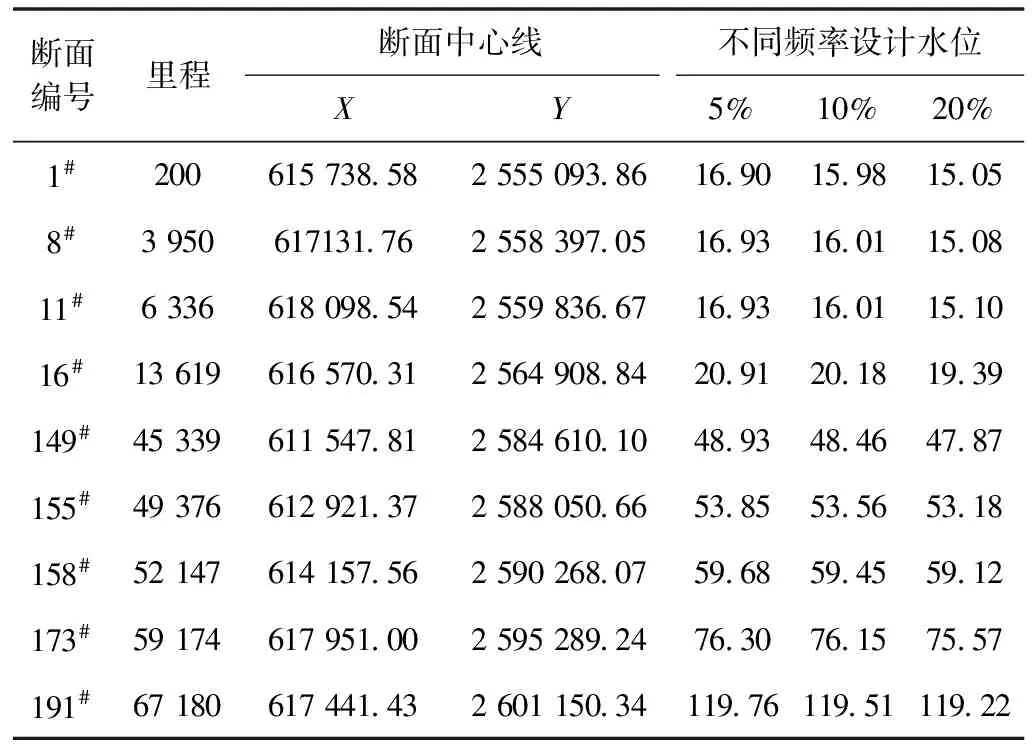
表2 悅城河設計水位計算結果
4.5 設計水位與岸坡交線自動化快速生成技術
利用Arcgis將設計水位計算結果與無人機航測獲取的高分辨率DEM數據進行疊加分析,獲取劃界河段設計水位與岸坡交線。具體過程分析如下:
1)獲取設計水位數據后,利用Arcgis對水位數據沿河道中心線進行二維插值,獲得二維水位數據。
2)將二維插值后的水位數據生成不規則三角網(TIN)數據集文件,具體操作步驟為:打開ArcToolbox工具→3DAnalyst工具→數據管理→TIN→創建TIN。
3)將不規則三角網(TIN)數據集文件轉換成柵格數據文件,具體操作步驟為:打開ArcToolbox工具→3DAnalyst工具→轉換→由TIN轉出→TIN轉柵格。完成柵格數據轉換,得到設計水位柵格圖層,設計水位柵格數據示意見圖5。
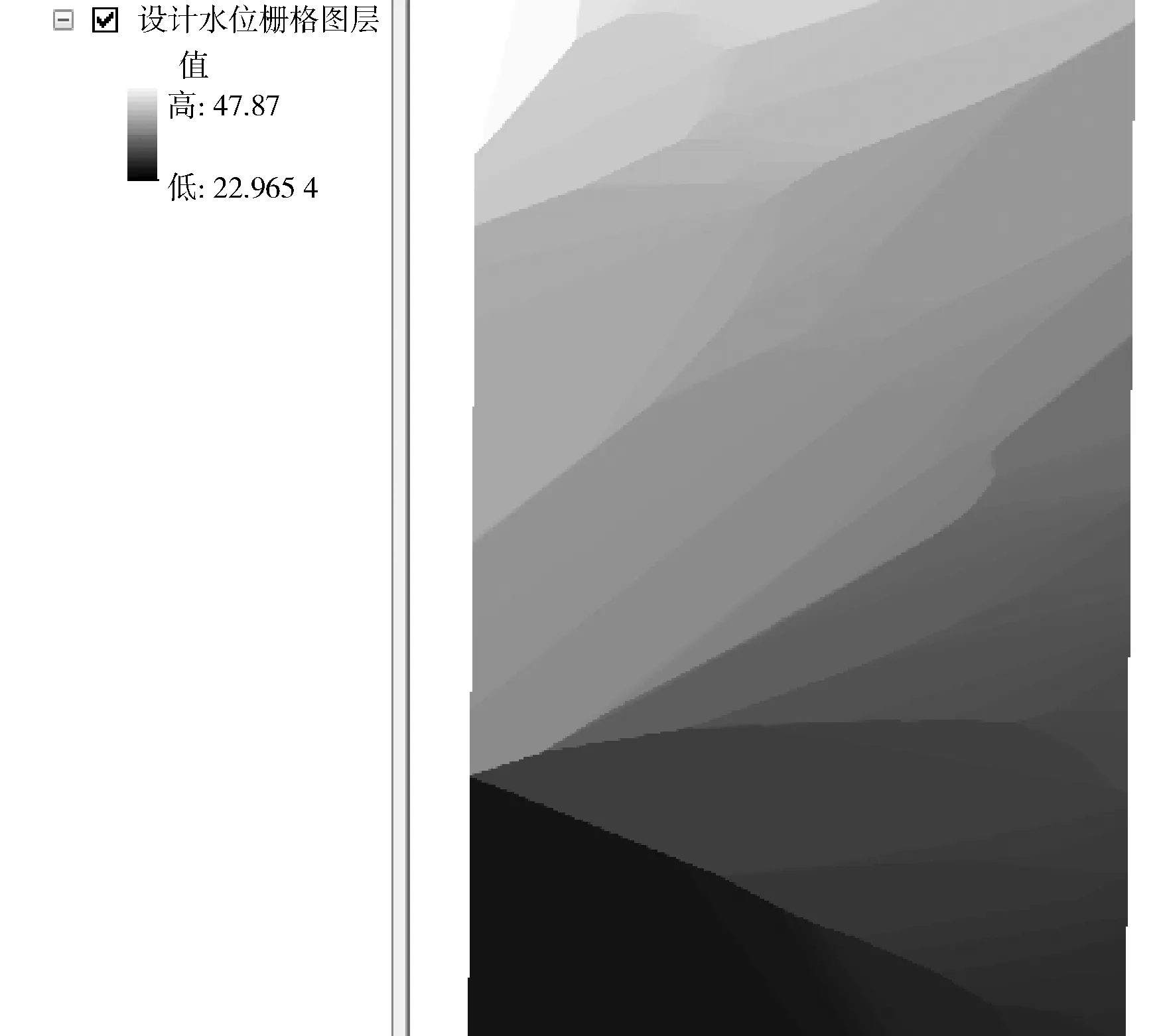
圖5 設計水位柵格數據示意
4)應用設計水位柵格數據與相應河道高分辨DEM數據相減,獲得水深數據,具體操作步驟為:打開ArcToolbox工具→3DAnalyst工具→柵格計算→減。完成設計水位柵格圖層與相應河道高分辨DEM數據處理,得到水深數據文件,河道高分辨DEM數據示意見圖6,水深數據示意見圖7。
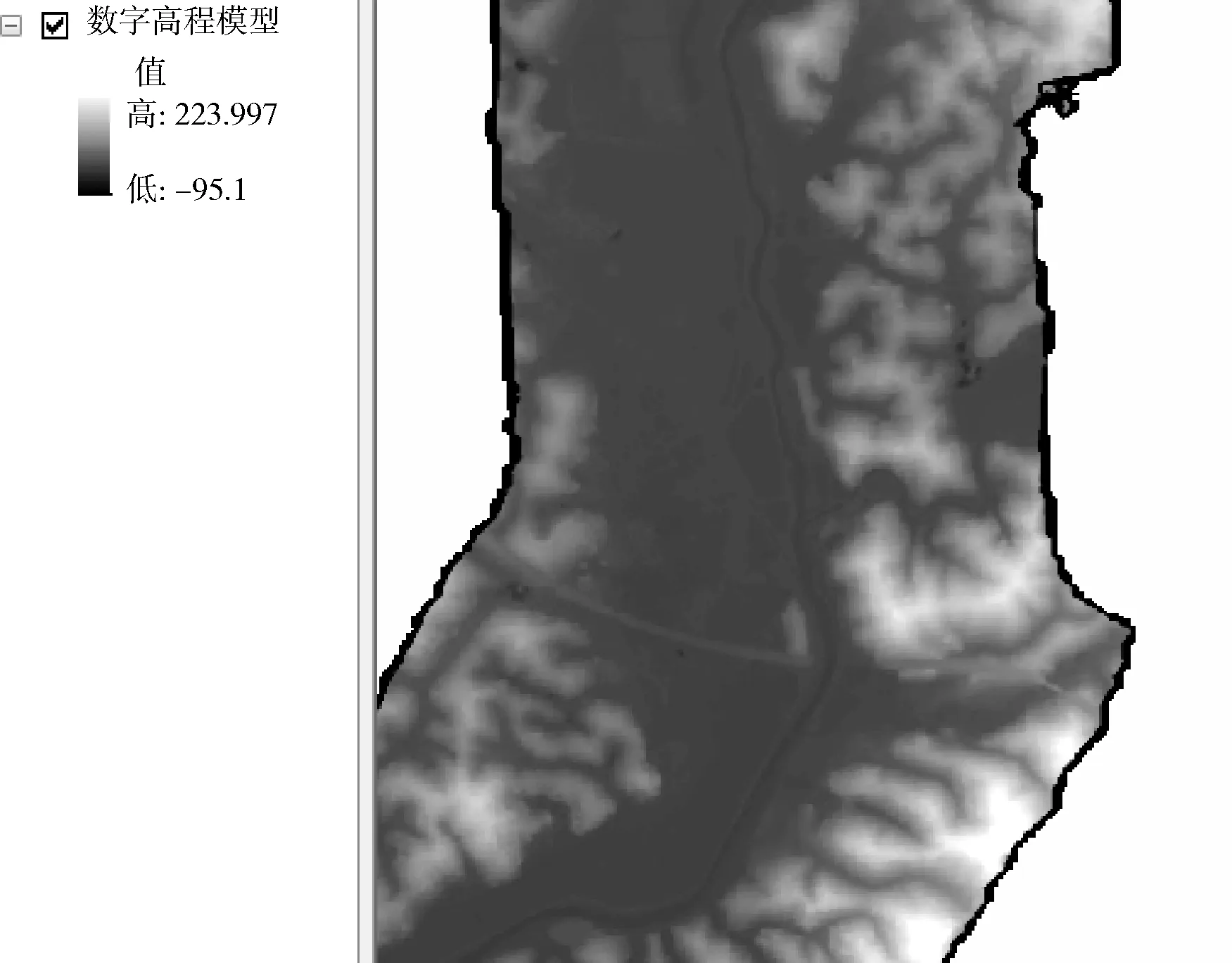
圖6 河道高分辨DEM數據示意
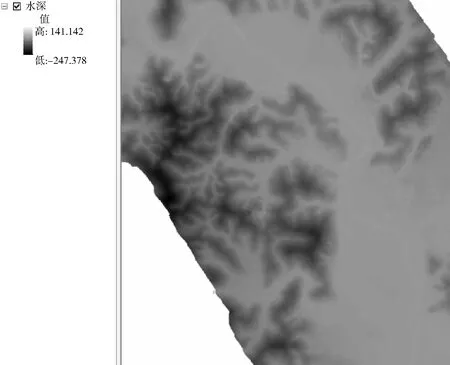
圖7 水深數據示意
5)對水深數據進行重分類,便可獲得設計水位與岸坡交線,具體操作步驟為:將水深圖層載入ArcMap→右鍵圖層屬性→符號系統→已分類→分類。對水深數據進行重分類,數值小于零表示地面高程高于設計水位的區域,數值大于零表示設計洪水淹沒范圍,設置區間-0.5~0作為緩沖區,此數值可根據數據分辨率設定。將無物理意義區間-247.38~-0.5設置為無顏色區域,緩沖區-0.5~0與設計洪水淹沒范圍區0~141.14分別設置不同顏色,便可獲得設計水位與岸坡清晰交線,同時緩沖區的設置亦可直觀表現地勢的陡緩。水位岸坡交線成果圖見圖8。
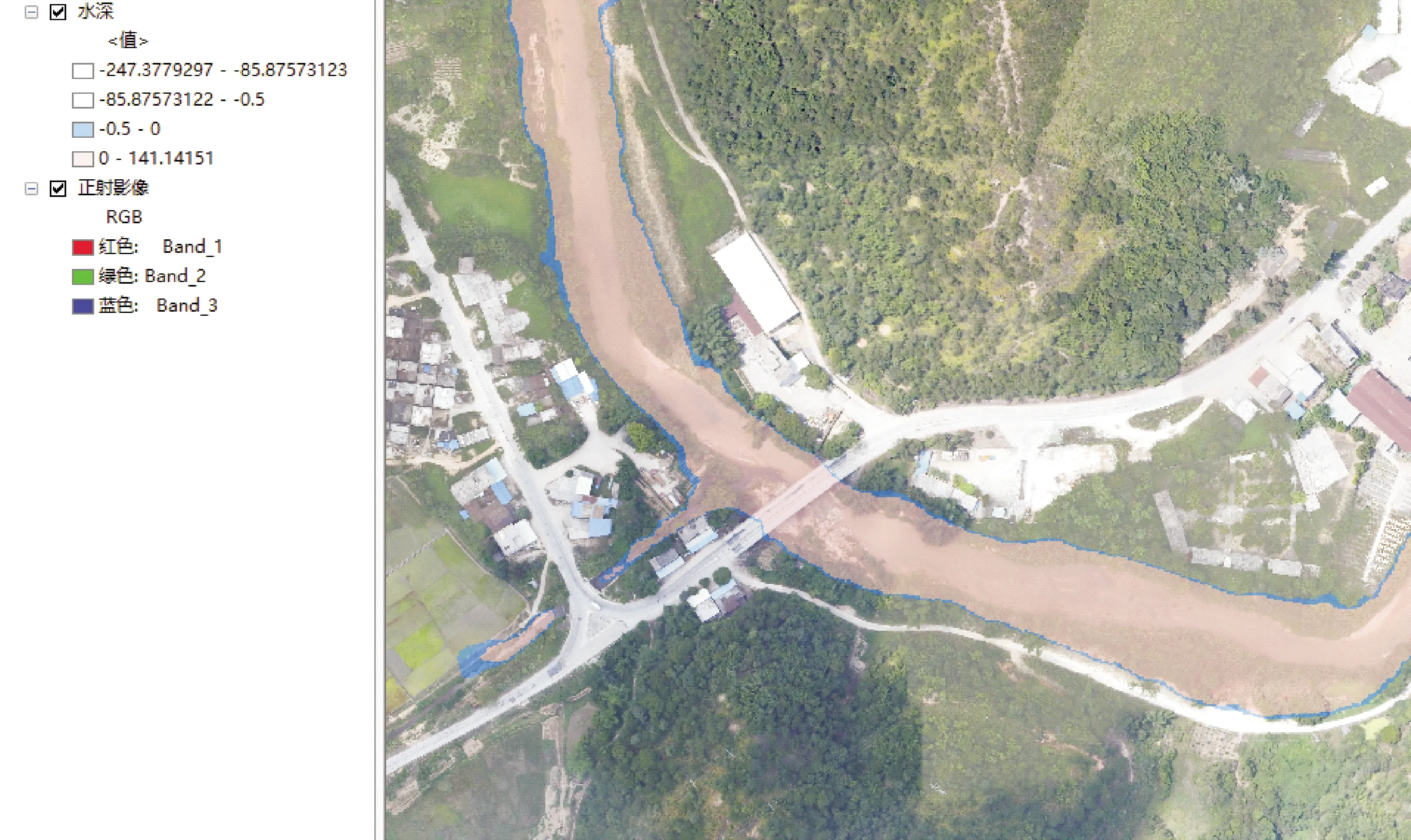
圖8 水深數據重分類后獲取水位岸坡交線成果示意
獲得設計水位與岸坡交線圖層后,基于高分辨率無人機航攝正射影像和現場調研情況結合人工目視解譯繪制設計水位與岸坡交線獲得無堤河段管理范圍基準線;然后根據劃界標準,分河段緩沖區分析得到管理區邊界。根據《廣東省河湖管理范圍劃定技術指引(試行)》,無堤河段劃界分為無堤山區河段和無堤平原河段,無堤山區河段以設計水位與岸坡交線作為管理區邊界,無堤平原河段以設計水位與岸坡交線為管理范圍基準線,根據劃界標準,結合護堤地寬度要求外延一定距離作為管理區邊界。
5 結語
本文通過無人機航測獲取劃界河段三維點云數據、高分辨率數字高程模型、正射影像數據等工作底圖,通過無人船河道斷面測量獲取1:500河道斷面數據,采用水文比擬法、綜合單位線法和新推理公式法3種方法分析計算設計洪水,然后建立河道一維數學模型推算劃界河段設計水位;最后利用Arcgis將設計水位計算結果與無人機航測獲取的高分辨率DEM數據進行疊加分析,實現設計水位與岸坡交線的自動化快速生成。
在運用無人機航測獲取的地形數據確定設計洪水位的過程中,受岸坡植被、建筑物等影響,存在生成的設計水位與岸坡交線與實際地形誤差,對于河岸建筑物較多的敏感河段應結合現場調研,RTK定點測量等方式進行修正,提高劃界成果的精度。另外,應用設計水位確定河道管理范圍較適用于山區河道或者地勢較高的平原河道,對于地勢較低的平原河道,計算的淹沒范圍普遍偏大,而中小河流一般河寬較窄,應用設計水位與岸坡交線作為河道管理區邊界易導致管理范圍偏大。
文章提出無堤河段設計水位與岸坡交線自動化生成的技術方案,讀者后續通過Python語言或Arcgis自定義工具箱可簡化操作步驟,進一步提高生產效率。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
藝術啟蒙(2018年7期)2018-08-23 09:14:18
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21