一種雷達智能抗干擾評估仿真系統*
2021-08-02 02:54:06彭志剛李寶鵬李大龍高偉亮
雷達科學與技術 2021年3期
彭志剛, 李寶鵬, 李大龍, 高偉亮
(海軍航空大學青島校區, 山東青島 266041)
0 引言
現代雷達所面臨的作戰環境日益惡化,尤其是雷達干擾的復雜化和智能化,雷達的生存作戰能力將會受到更加嚴峻的挑戰[1],為此雷達裝備采用了相應的抗干擾技術,以提高復雜電磁環境下的探測性能和生存能力。隨著雷達對抗手段日益多樣化,傳統雷達抗干擾評估方法不能滿足當今智能抗干擾評估需求[2-3]。在這種背景下需要摸清復雜電磁環境干擾態勢、輻射源特性,研究有效的雷達抗干擾的技術和方案,建立科學的雷達抗干擾評估指標體系,準確掌握雷達對各種干擾樣式的抗干擾效果,這是雷達抗干擾研究的核心和關鍵[4-6]。
受設備、空間、時間、環境等多種因素的影響,如何有效評估雷達抗干擾性能是目前面臨的難題。傳統的雷達抗干擾性能評估方法體系不健全,多側重于雷達探測性能技術參數評估;仿真技術方法單一,仿真模型局限在單一功能級或信號級,沒有從雷達抗干擾全工作過程進行建模;智能化程度低,需要專業人員操作和數據分析,評估結果可視性差[7-10]。
筆者基于現代雷達智能抗干擾工作體系,設計實現了基于干擾信號感知的雷達智能抗干擾評估仿真系統。首先對戰場環境進行感知和分析,對于干擾類型和參數進行分析和識別,然后基于這些信息和接收回波處理的信息,在線調整發射波形并選擇對應的干擾抑制方法抑制各種單一干擾和復合干擾,使得干擾機很難獲得我方雷達發射波形,難以進行干擾,最后對雷達采用抗干擾措施前后的抗性能技術指標進行評估。該系統可為雷達抗干擾技術的分析驗證提供良好的驗證平臺。
1 雷達智能抗干擾技術
現代雷達有源干擾系統從對雷達信號的截獲識別到干擾信號的處理轉發,已經形成了一個完整的閉環的智能化干擾系統,通過對輻射源進行分選識別、參數估計,截獲并測量雷達信號PDW(Pulse Description Word,脈沖描述字)參數,然后參照被截獲雷達信號特征,根據干擾策略進行放大、延時、調制和轉發,形成多種樣式的干擾信號,可對雷達實施效果較好干擾。假如雷達設備僅采取傳統被動和單一的抗干擾方法(如自適應頻率捷變、自適應旁瓣對消等),將很難對付有源欺騙干擾、噪聲靈巧干擾、密集干擾和復合式干擾等類型干擾信號。
雷達只有通過智能抗干擾技術才能很好地解決以上問題,雷達智能抗干擾技術的核心是自動識別干擾類型并自動采取抗干擾技術措施,其主要體系構成如圖1所示[11]。雷達智能抗干擾系統通常由干擾特征提取、干擾識別、反干擾調度和反干擾措施四個部分組成,它從雷達信號發射、接收到信號處理形成了一個在線閉環系統,通過對雷達接收通道中的干擾信號有無進行判斷,并進行特征提取和干擾類型的分類,然后針對不同類型的干擾,分別調用對應的抗干擾技術措施,它是一個認識、決斷、處理、再認識、再決斷、再處理這樣不斷循環的過程,雷達智能抗干擾具備更為復雜的準則和認知通道,可在復雜干擾環境下有效對抗雷達有源干擾。
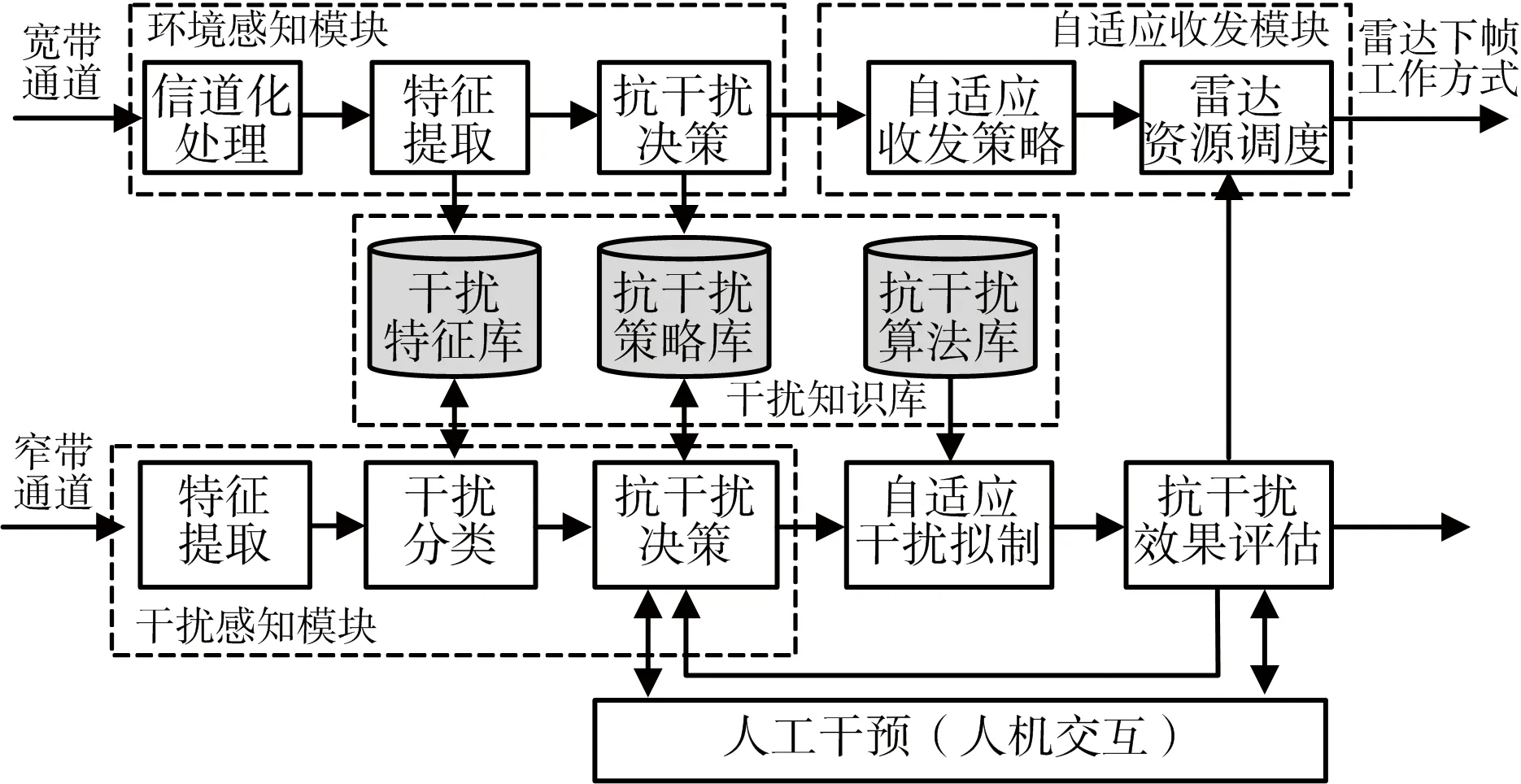
圖1 雷達智能抗干擾系統構成
2 雷達智能抗干擾評估仿真系統設計
2.1 智能抗干擾評估體系
如圖2所示,雷達智能抗干擾評估體系主要由干擾信號感知能力評估和抗干擾能力評估兩大模塊組成。干擾信號感知能力主要考察對干擾類型的識別正確概率和識別速度。抗干擾能力主要考察在采取最優干擾措施前后,雷達壓制比、距離威力、目標檢測數量、欺騙干擾成功概率、被截獲概率等抗干擾性能參數的改善情況。
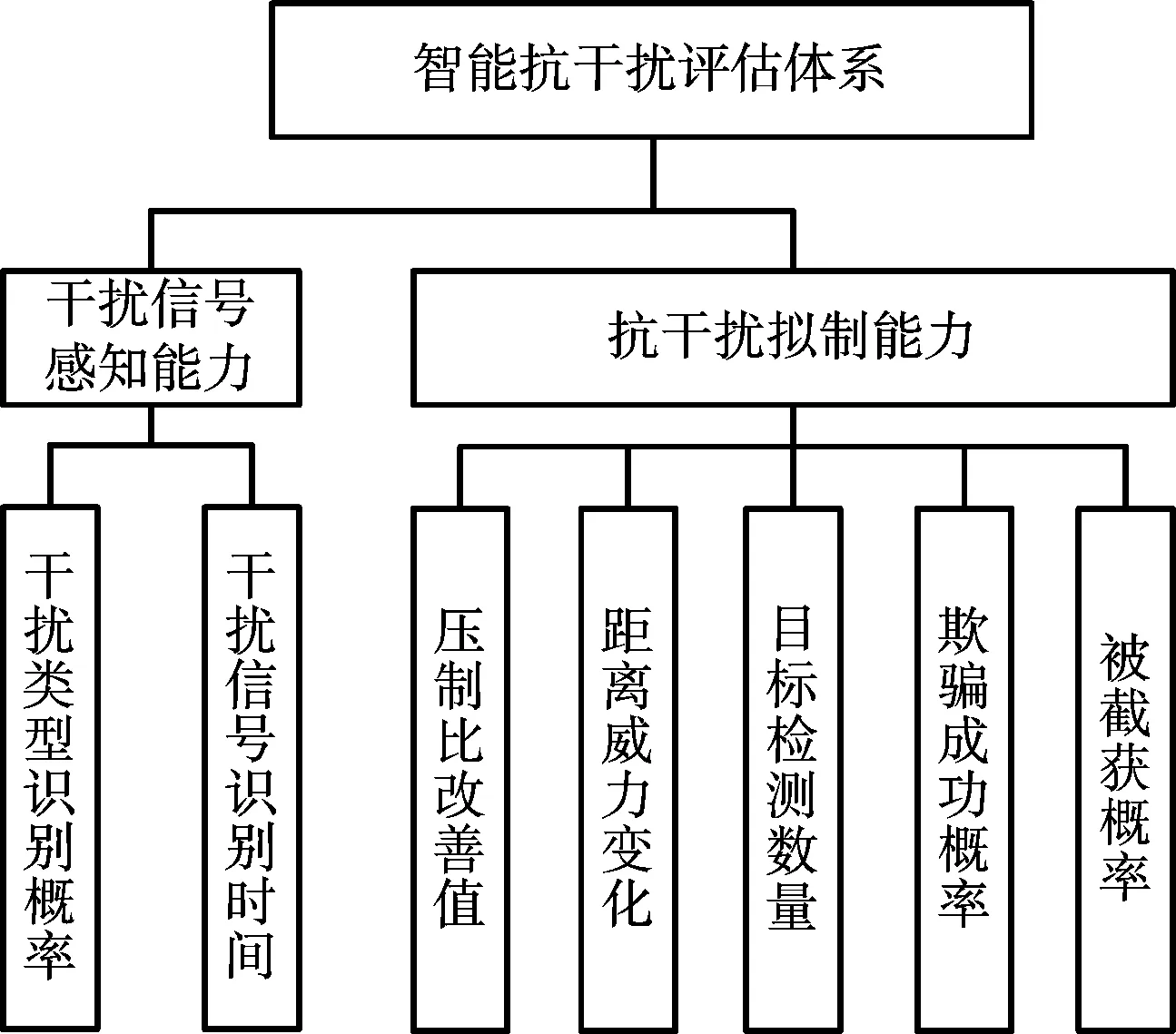
圖2 智能抗干擾評估體系
2.2 系統功能設計
智能抗干擾仿真評估系統功能架構如圖3所示。干擾感知仿真部分用來指定生成某種類型的干擾信號或隨機生成一種干擾信號,然后將其加入到雷達接收信號中,通過提取干擾信號的時域波形和頻譜分布參數作為特征值,運用支持向量機進行干擾類型特征分類識別訓練,給出回波信號中的干擾信號類型識別結果。干擾擬制仿真部分針對干擾感知部分識別出的干擾信號類型,自動選擇最優的抗干擾策略,并調用相關算法技術進行主動與被動抗干擾。其中,自適應旁瓣對消算法用于噪聲干擾的抑制,旁瓣匿影用于密集假目標干擾的抑制,復合樣本選取旁瓣對消算法用于抑制復合干擾,主動抗干擾方向圖用于雷達發射波形在干擾方向形成零陷,減少雷達信號被截獲概率,提高旁瓣對消的效果。抗干擾性能評估部分主要用來計算采取干擾措施后,雷達抗干擾指標的變化情況,如檢測目標數量、壓制比改善值、欺騙成功概率等,并給出最優主動抗干擾方向圖。
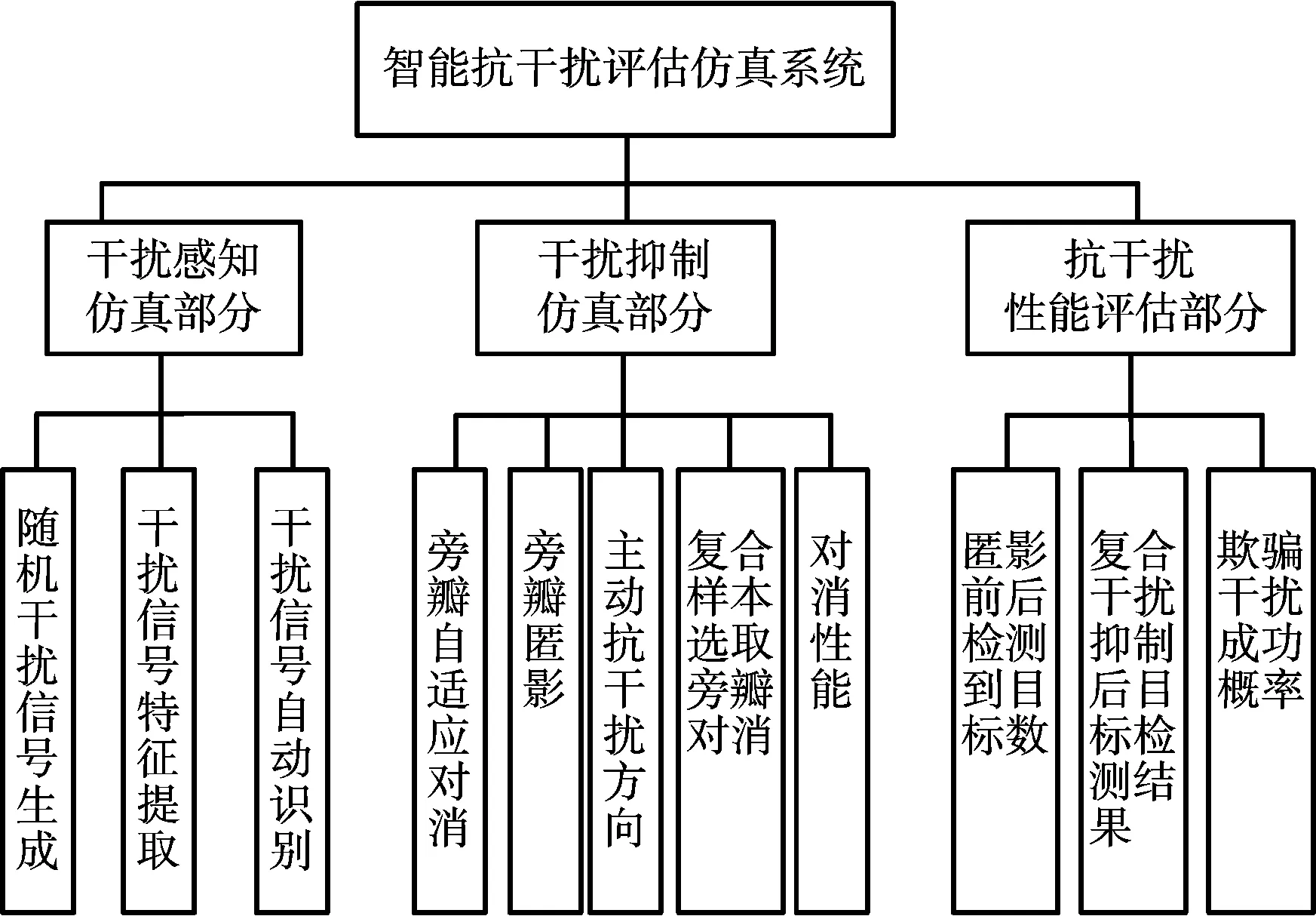
圖3 智能抗干擾評估仿真系統功能架構
2.3 系統工作流程
依據智能抗干擾雷達工作過程,構建雷達抗干擾性能評估仿真系統。雷達抗干擾性能評估仿真系統通過模擬機載雷達和干擾機各個功能模塊信號處理的過程,以單個脈沖重復周期為仿真時間單位,建立了完整的雷達與干擾機之間數據流動與處理的動態閉環仿真環境。智能抗干擾仿真評估系統的工作流程設計如圖4所示。
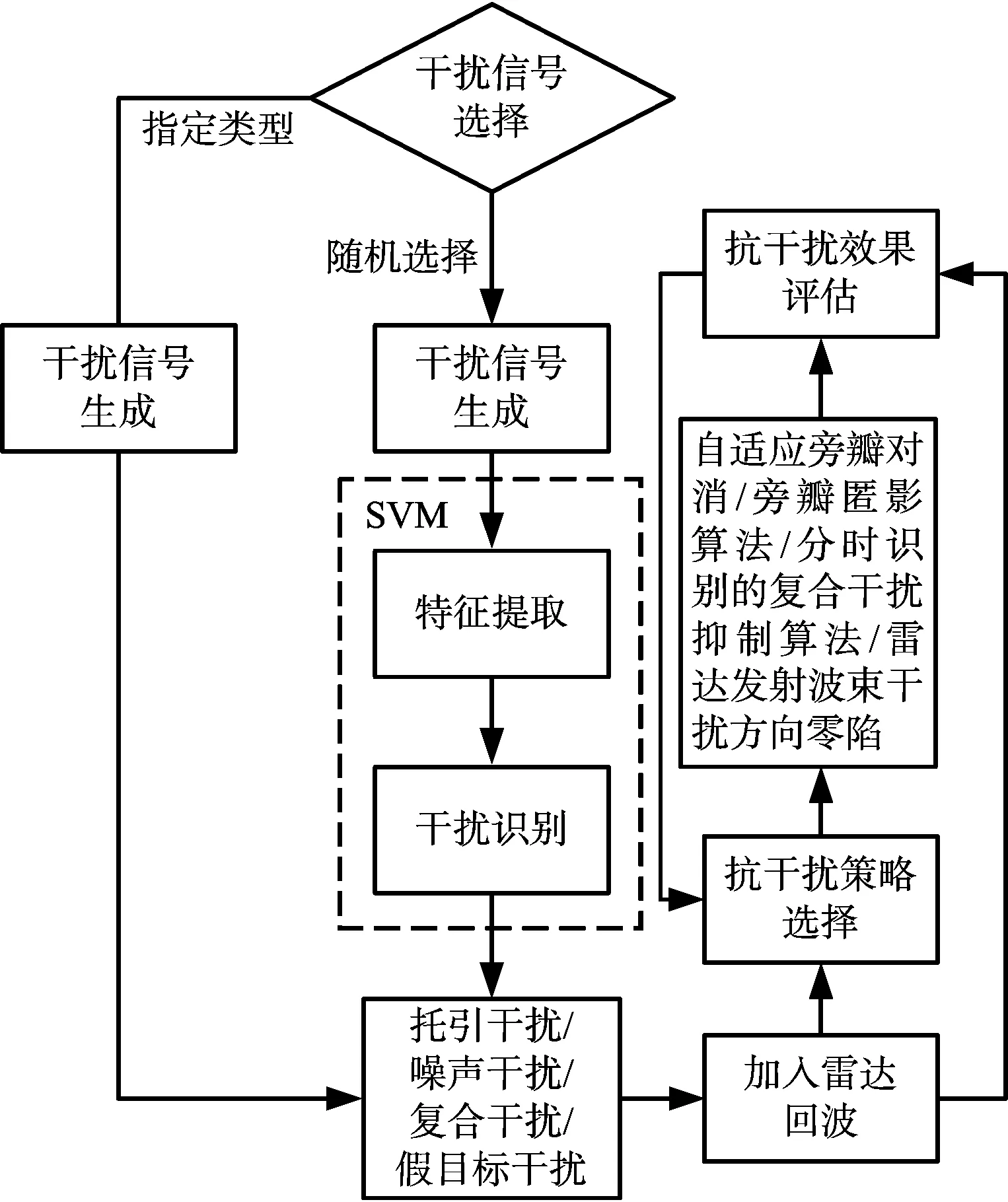
圖4 雷達抗干擾仿真評估流程
首先系統隨機生成一種類型干擾信號,加入到干擾識別模塊進行干擾類型的自動識別,也可以直接指定生成某種類型的干擾。干擾信號加入到雷達陣列天線接收到的回波中,根據干擾的類型選擇合理的抗干擾策略,實施自適應旁瓣對消/旁瓣匿影算法/分時識別的復合干擾抑制算法/雷達發射波束干擾方向零陷等單一或組合抗干擾技術。將雷達采取抗干擾和未采取抗干擾的目標探測性能進行比較,比較雷達采取抗干擾措施前后的抗干擾效果,根據抗干擾效果自適應調整干擾策略并更新干擾策略知識庫。
2.4 系統界面設計
如圖5所示,系統主界面設計為5大功能模塊:信號選擇面板、特征參數面板、抗干擾方法面板、結果顯示面板和效果評估面板。人機交互可操作的窗口包括1個彈出式菜單“信號類型”選擇窗口和6個仿真按鈕(干擾識別率按鈕、SVM1按鈕、SVM2按鈕、干擾抑制仿真按鈕、欺騙干擾成功概率按鈕和主動抗干擾方向圖按鈕),其中每個按鈕之間相互獨立。雷達信號、干擾信號、抗干擾技術等參數設置與修改,可通過后臺代碼模塊進行。
圖5 雷達智能抗干擾評估系統界面
信號選擇模塊用來進行指定干擾信號類型選擇和隨機干擾信號類型的選擇(干擾信號類型為托引干擾、噪聲干擾、密集假目標干擾和復合干擾信號)。隨機選擇的干擾信號輸入系統,系統會進行干擾特征參數的提取,并將特征參數向量輸入到SVM進行干擾類型的識別,并進行選擇特征參數和識別結果顯示。
抗干擾方式模塊是指系統干擾信號識別的類型,自動采取的抗干擾措施,通過干擾擬制仿真操作,可以進行被動干擾抑制的仿真實驗,并根據干擾類型的不同得到不同干擾擬制的結果,在右邊窗口進行顯示。
效果評估面板用來顯示采取相應抗干擾措施后各項抗干擾指標的數值。
主動抗干擾圖可以根據主瓣區域、主瓣電平、零陷區域和零陷電平等綜合要求,完成雷達發射方向圖優化,在不影響其他性能的前提下,在干擾方向形成零陷,減少雷達被截獲概率。
3 關鍵仿真模塊模型
3.1 陣列信號模型
天線陣列是由N個間隔為d的陣元組成的均勻線陣。雷達回波信號入射到陣列的方向為θ0,J個干擾信號入射到陣列的方向為θj,j=1,2,…,J,k時刻N×1維主陣列接收數據矢量X(k)為
X(k)=AS(k)+N(k)
式中,X(k)=[x1(k),x2(k),…,xN(k)]T,xi(k)表示主陣列第i個陣元k時刻接收到的數據,A為N×(J+1)維陣列流行矩陣。
A=[a(θ0),a(θ1),…,a(θJ)]
a(θJ)=[1,e(jβq),…,ej(N-1)βq],q=0,1,2,…,J

(1)
3.2 基于SVM的干擾識別模型
基于SVM的干擾類型識別模型如圖6所示。提取不同干擾信號的時域、頻域特征參數(矩偏度、矩峰度、包絡起伏度、瞬時幅度頻譜最大值等),選擇區分度大的特征參數構造學習訓練樣本,輸入SVM模塊進行干擾類型識別訓練,建立干擾類型分類模式集,得到最優分類線。
圖6 SVM識別模型
根據特征參數區分度θ定義如下:
(2)
式中,rmax為特征參數中較大的一個數,rmin為特征參數中較小的一個數。
結合特征參數選取的原則,選取區分度有區別性的特征參數作為分類特征,選取特征數值趨于穩定時的特征值作為特征向量,不同類型干擾信號識別特征參數如表1所示。
表1 不同干擾信號特征參數
3.3 自適應旁瓣對消模型
旁瓣對消利用輔助天線接收到的干擾信號來壓低主天線旁瓣進來的定向干擾[12-13]。閉環自適應旁瓣相消原理如圖7所示,將輸出與期望的輸出誤差反饋給權值估計模塊,使其朝著估計的梯度負方向不斷迭代,直至輸出信號與期望信號誤差小于某個特定值,獲得最優權。
圖7 自適應旁瓣對消原理
k時刻N個陣元輔助陣列接收數據為
Y(k)=BS(k)+Nna(k)
式中,B=[b(θ0),b(θ1),…,b(θM)]為輔助陣列的陣列流行矩陣,Nna(k)為M×1維陣列陣元高斯白噪聲矢量,Nna(k)=[n1(k),n2(k),…,nM(k)]T。
設輔助天線個數為Z,m(t)為t時刻主天線接收的信號矢量,S(t)為輔助天線接收的信號矢量。
S(t)=[s1(t),s2(t),…,sZ(t)]
輔助天線最優權矢量ω為
ω=[ω1,ω1…ωz]T
主輔通道經過加權輔助通道對消后的輸出信號為
r(t)=m(t)-ωHS(t)
旁瓣對消后的剩余功率pres為
pres=E[|m(t)-ωHS(t)|2]=
(3)
式中,RSm表示輔助通道與主通道接收信號的N×1維互相關矩陣,RSS表示輔助通道接收干擾信號的N×N維自相關矩陣。

ωopt=RSS-1RSm
3.4 發射波束優化模型
只考慮雷達危險方位區域形成低的波束副瓣,建立多自變量波束形狀函數模型如下:
y=f(x1,x2,…,xn)
(4)
通過給予自變量x1,x2,…,xn適當的參數,使得上述的函數模型能與期望波束形狀y′相匹配。參數按如下準則選取:使得y′與y之差的平方和最小[14-16]。
(5)
用歐幾里得度量表示如下:
(6)
其中,ξ為預先設定的危險區最大旁瓣電平,ε為其他旁瓣方向的最大電平,θS∈Θ1(s=1, 2,…,S)、θm∈Θmain(m=1,2,…,M)和θe∈Θ2(e=1,2,…,E)分別表示危險區旁瓣區Θ1、主瓣區Θmain和其他旁瓣區Θ2的有限采樣近似,Fd(θm)為主瓣區方向(包括雷達目標方向和通信方向)的期望方向圖。
(7)
4 仿真分析
條件設置:雷達發射信號為線性調頻信號,噪聲干擾為帶通高斯噪聲,復合干擾同時含有噪聲干擾和密集假目標干擾,仿真數據采用下變頻后的基帶信號。提取干擾信號特征時,時域特征提取在脈壓之后,頻域特征提取在脈壓之前,做500次蒙特卡洛實驗進行仿真。仿真系統對不同干擾類型的識別情況,對應地采取干擾擬制技術策略,采取干擾擬制技術前后的目標檢測情況,以及采取不同干擾擬制措施后抗干擾性能改善情況。
圖8(a)、圖8(b)分別為兩個SVM分類器的訓練情況,SVM1在頻域矩峰度系數25和頻域矩偏度系數1.9處建立了最優分類線,將噪聲干擾和密集假目標干擾進行了區分。SVM2在頻域包絡起伏度1.6和歸一化瞬時頻譜最大值70處建立了最優分類線,將復合干擾和密集假目標干擾進行了區分。圖8(c)為系統對噪聲干擾、密集假目標干擾和復合干擾三種不干擾在不同干噪比JNR的識別概率情況。其中,噪聲干擾在JNR約大于4 dB時識別概率為98%以上。密集假目標干擾在JNR約大于7 dB時識別概率為98%以上。復合干擾在JNR約大于10.5 dB時識別概率為98%以上。
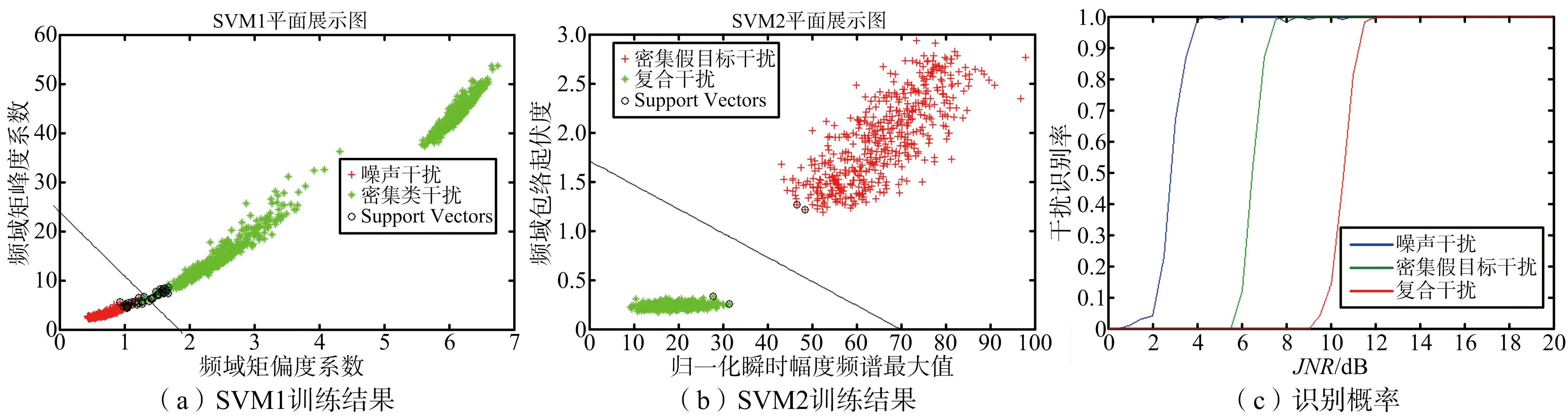
圖8 干擾類型識別情況
圖9為針對不同的干擾信號,系統采取相應干擾擬制技術前后雷達對目標檢測回波對比情況,表1為雷達抗干擾性能改善情況。噪聲干擾采用的旁瓣對消干擾擬制策略,壓制比改善了28.73 dB,距離威力降低了6.79%,欺騙成功概率為6.5%。密集假目標干擾采用的旁瓣匿影干擾擬制策略,將擬制前檢測目標數量由80個降低到了擬制后1個,欺騙成功概率為4%。復合目標干擾采用復合樣本選取旁瓣對消干擾擬制策略,壓制比改善了27.54 dB,距離威力降低了9.784%,欺騙成功概率為9%。

圖9 抗干擾擬制前后目標檢測回波對比

表1 抗干擾性能改善情況
按照表2設置主動抗干擾陣列天線發射波束優化參數,在干擾方向形成低的波束副瓣零陷,同時保持雷達在目標探測空間功率要求,達到主動抗干擾擬制效果。圖10為陣列天線波束優化方向圖,可以看出方向圖在0°出現主波束,主瓣寬度從-2°~2°,在預設的40°出現零陷,在38°到42°之間出現超低旁瓣的凹陷區域,幅度在-80 dB以下,雷達探測信號被截獲概率降低了82.22%。
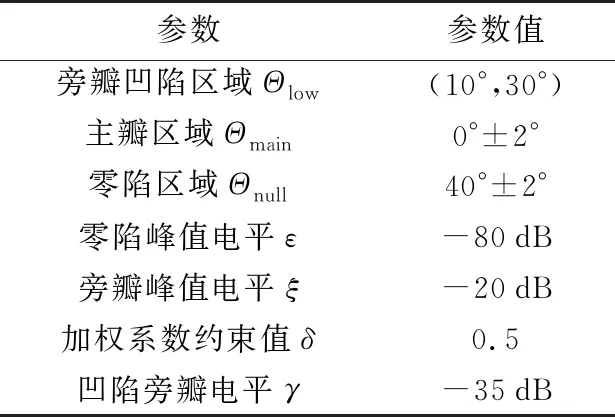
表2 波形優化參數
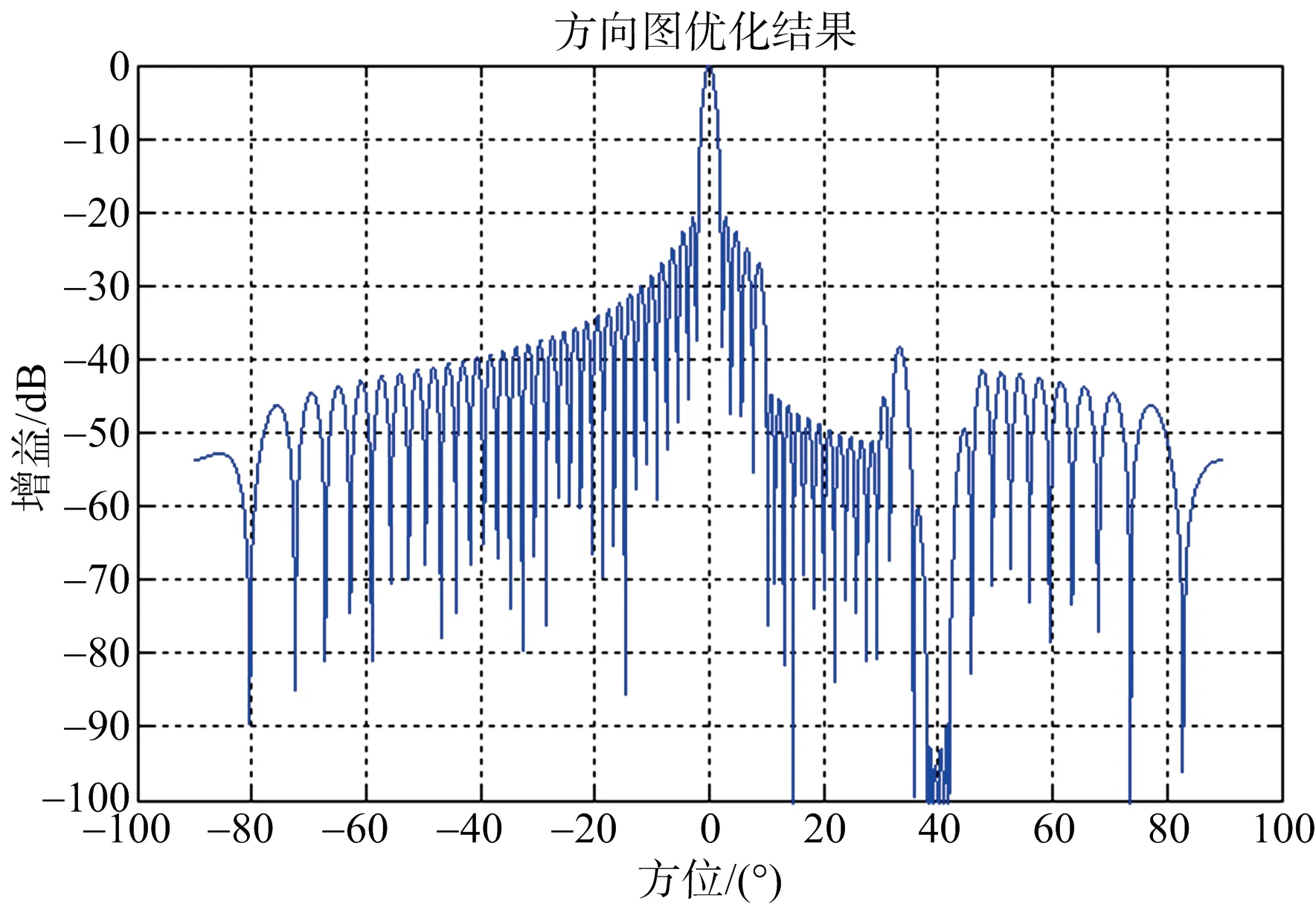
圖10 天線陣仿真方向圖
5 結束語
本評估仿真系統可實現復雜電磁干擾環境的感知及特性分析,根據干擾環境采取系統有效的雷達抗干擾技術和方案,并對抗干擾效果進行評估,以模擬雷達在復雜電磁環境下的生存狀況。整個仿真評估可采集各關鍵環節評估數據,實現針對性地分析和驗證,使雷達抗干擾技術改善評估分析過程更加直觀和通透。因此,本系統對雷達各種抗干擾技術運用改善效果和技術研究具有一定的實用價值。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
鴨綠江(2021年35期)2021-04-19 12:24:18
計算機應用(2021年1期)2021-01-21 03:22:38
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年11期)2018-08-04 03:25:42
