掘進機橫向和縱向隨機振動響應分析
2021-08-02 07:24:24*武杰
當代化工研究
2021年14期
*武 杰
(山西汾西瑞泰正中煤業有限公司 山西 031400)
1.引言
由于在縱向巷道掘進機的切割過程中,截齒和截割頭的工作區域不斷變化,因此,煤和石料的儲存條件既困難又容易改變。頭部切割的物理機械性能以及不可預測的隨機激勵是導致各部位產生振動,影響了掘進機的穩定和可靠性。
2.掘進機動力學模型
(1)假設與簡化
在滿足精度的基本要求的基礎上,應根據實際設計和操作條件做出合理的假設并進行簡化。主要假設如下:①掘進機所有部件的質量均相同,并且頭部、控制臺和車身的切割質量分別為m1、m2和m3。②煤的單軸抗壓強度是恒定的;③連接范圍變化很小,每個部分都視為未連接,阻尼為粘性阻尼,其中k1、k2和k3為刀頭和刀臂以及刀體,刀體與底板之間的剛度,刀頭和刀片。控制臺和機身之間的水分以及機身和底板之間的水分分別稱為c1、c2和c3。
(2)運動微分方程的建立
與高度,簡化的縱向方向(z方向)和縱向方向(y方向)的假設一致,系統的動力學模型如圖1所示。
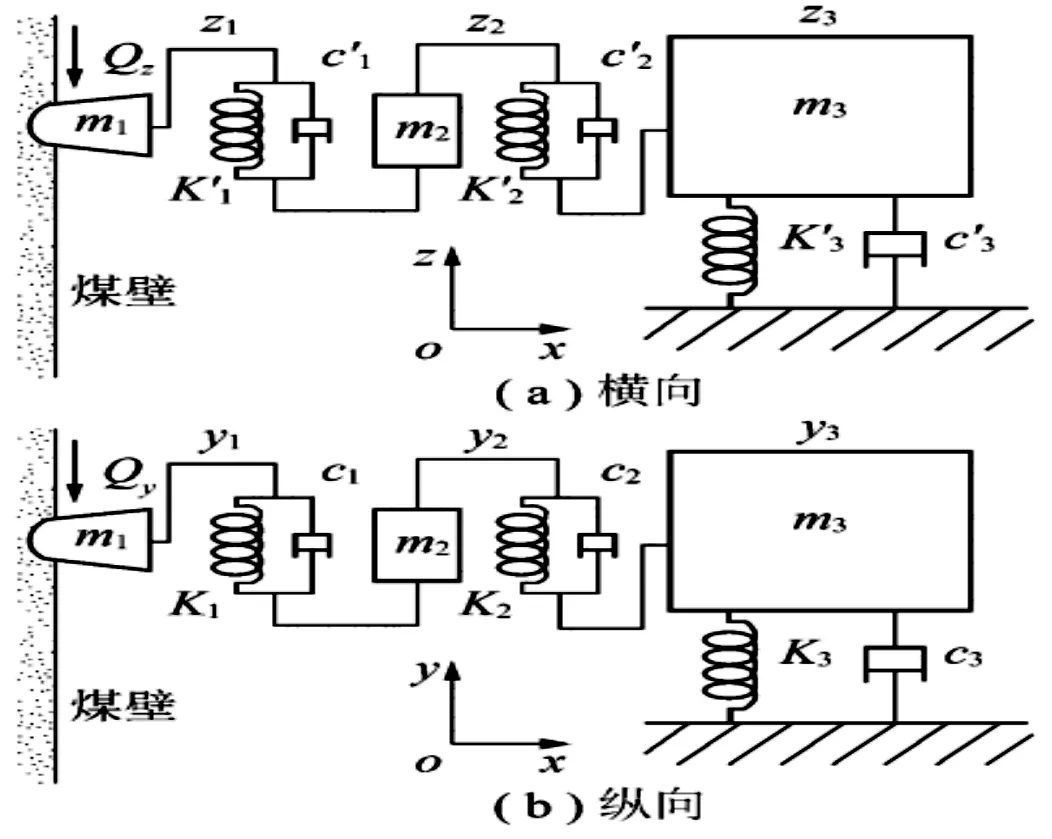
圖1 掘進機橫向、縱向動力學模型
系統的拉格朗日方程:

式中,Qj為激振力;t為時間;為廣義速度及廣義位移;j=1,2,3,……。系統的縱向勢能V、動能T和耗散函數D為:
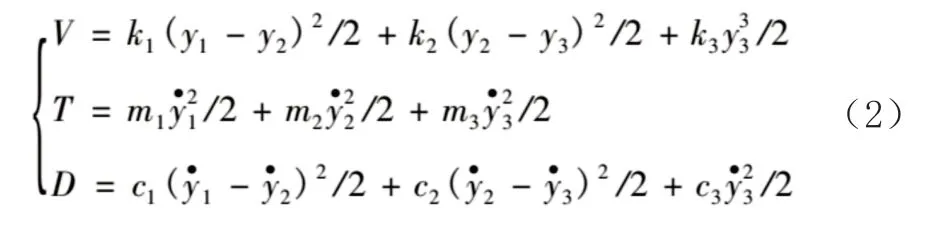
將(2)代入(1)得方程:

同理,求得橫向運動微分方程為:

(3)構造截割頭載荷的虛擬激勵
如果線性系統受到自然高光譜密度Sxx連續激發(t),則其響應中的自然電光譜為y[Syy]=|H|2[Sxx],H是常數響應函數。
使用傳統方法計算Syy需要花費很長時間利用公式算出頻率響應函數矩陣|H|虛擬激勵方法具有簡單,高效的優點。
登錄APP查看全文
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2020年2期)2020-06-02 11:29:24
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19