機器人搬運碼垛金字塔形狀物料仿真設計研究
2021-08-03 05:04:41潘杰
電腦知識與技術 2021年17期
潘杰
摘要:搬運碼垛是機器人經常要完成的任務,把物料搬運碼垛成一個金字塔形狀需要一個精確的設計過程,此過程要設置帶有傳感器的能夠傳送物品的傳送帶功能裝置,設置準確的屬性和信號連接,設置工作站的邏輯關系,對起始點和放置點進行示教定位、編寫搬運碼垛程等。本文在robotstudio基礎上完成了機器人將物料分層次碼垛成一個金字塔形狀智能工作站。
關鍵詞:機器人;搬運;碼垛
中圖分類號:TP391? ? ? 文獻標識碼:A
文章編號:1009-3044(2021)17-0021-03
開放科學(資源服務)標識碼(OSID):
1 研究任務
在機器人工作站中,編寫機器人程序,完成傳送帶物料輸送到位后,機器人從傳送帶上將物料取走,擺放到指定的物料盤中,要求按照由右到左的順序擺放,分五層擺放,從最低層往上數,擺放數量為5個、4個、3個、2個、1個,最終擺放成金字塔形狀。物料直徑是40mm,物料高度為20mm,左右物料中間空襲的間距是2mm。啟動和停止按鈕在RobotStudio中通過仿真工作站I/O信號模擬。利用教建立的仿真工作站進行機器人編程并仿真運行無問題后,在將程序導入實際的工作站中,示教運行完成物料的搬運動作。
2 傳送帶功能的建立
在建模工具欄中選擇“Smart組件”,在RobotStudio“布局”窗口的列表中右擊新建立的Smart組件名稱,快捷菜單中選擇“重命名”,輸入名稱為“傳送帶動作”, 在“布局”窗口的列表中拖拽“小物料和傳送帶到傳送帶動作”節點下。
2.1.設置傳感器
在傳送帶動作組件窗口中點擊“添加組件”,從菜單中選擇“傳感器”,然后在子菜單中選擇“PlaneSensor”。設置動作組件:在傳送帶動作組件窗口中點擊“添加組件”,從菜單中選擇“動作”,然后在子菜單中選擇“Source”。在屬性窗口中進行設置。? 添加“Queue”組件,不需要對屬性進行設置。? 設置LinearMover組件。添加“LogicGate”組件,在屬性窗口中設定“Operator”為NOT。
3 設定屬性和信號連接
3.1 設置屬性連結
在“傳送帶動作”組件窗口中,點擊“屬性與連結”標簽,然后點擊“添加連結”,將彈出“添加連結”窗口。
3.2 添加I/OConnection
(1)設置傳送帶信號輸入開始小物料的來源的復制。
(2)設置來源執行后,開始隊列的執行,將復制的小物料排列在隊列后。
(3)設置傳感器識別到物料后,隊列停止。
(4)設置傳感器識別到物料后,給外部輸出識別到物料的信號。
(5)設置當物料被拿走后,傳感器沒有識別到物料關聯反向信號。
(6)設置反向信號與來源執行相關聯,實現當傳感器沒有識別到物料時,物料復制并重復進行排隊前進。
4 工作站的邏輯設置
4.1 添加機器人系統
在添加機器人系統的選項界面中點擊“選項”按鈕。彈出更改選項窗口,在類別中選擇“Default Language”,在選項中取消English的勾選,勾選Chinese,為了讓機器人能夠與外部通信還需要添加網絡設備,所以在類別中選擇“Industrial Networks”,在選項中勾選“709-1 DeviceNet Master/Slave”,點擊“確定”按鈕后,回到“從布局創建系統”窗口。
4.2 建立機器人IO信號
點擊“控制器”菜單,在左側控制器列表中展開“配置”接點,雙擊“I/O System”接點,在右側打開配置I/O系統窗口。在配置I/O系統窗口中右鍵單擊“DeviceNet Device”節點選擇“新建DeviceNet Device…”,打開的窗口中的Name后文本框中輸入“D651”,然后點擊確定。在配置I/O系統窗口中右鍵單擊“Signal”節點選擇“新建Signal”,在Type of Signal列表中選擇“Digital Input”。在配置I/O系統窗口中右鍵單擊“Signal”節點選擇“新建Signal”,在Type of Signal列表中選擇“Digital Output”。
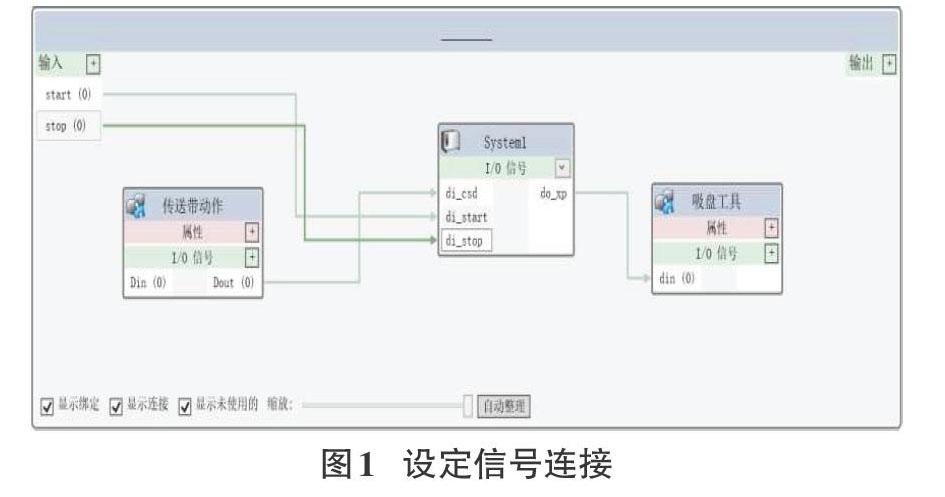
4.3 設定信號連接
進入“仿真”菜單,在工具欄中選擇“工作站邏輯”。設置工作站啟動信號用來實現啟動功能,模擬工作站中的“啟動按鈕”的功能;設置工作站停止信號用來實現停止功能,模擬工作站“停止按鈕”的功能;設置與夾爪的連接實現機器人通過“do_xp”信號來控制吸盤的開合;設置傳送帶信號與機器人信號的連接實現機器人通過 “di_csd”信號是否為1來判斷物料是否到位。設置工作站啟動信號與機器人信號的連接設置工作站啟動信號與傳送帶啟動信號連接:實現傳送帶獲得工作站傳入的啟動信號;設置工作站停止信號與機器人信號的連接:實現機器人獲得工作站傳給機器人的停止信號。設置結果如圖1所示。
5 碼垛編程
5.1 搬運流程圖
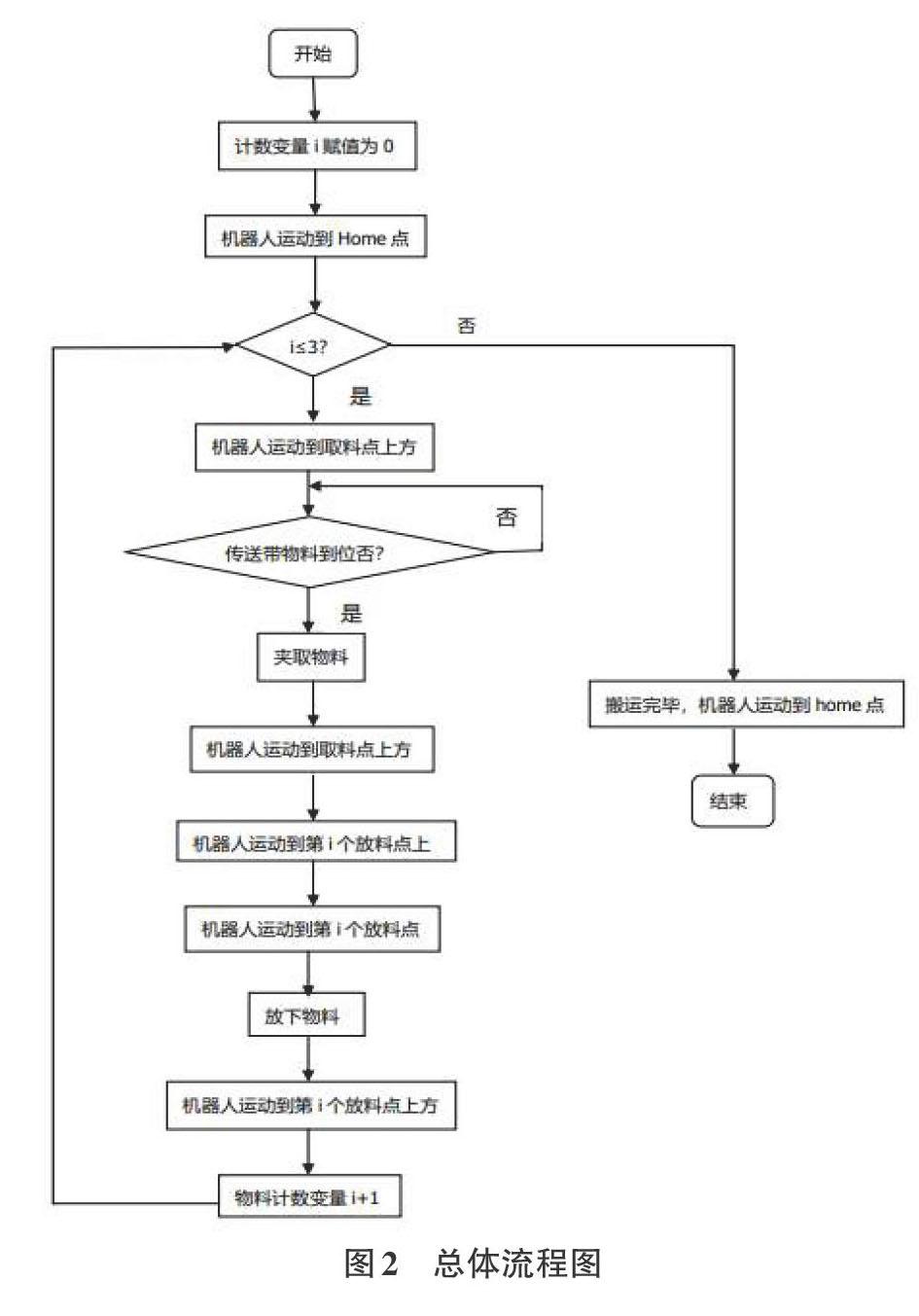
機器人首先運動到初始位置,之后機器人末端工具直線運動到第一個待取料的上方點位,然后垂直下落到取物料點位,夾取物料、向上抬起到上方定位后平移到待放點位上方,再垂直下落到放置點位后放下物料,之后機器人抬起。夾取其他物料的過程與第一個相同,只是點位不同。總體流程圖如圖2所示。
5.2 程序數據聲明
編寫程序前首先要進行程序數據聲明,聲明起始點、取料點、放料點等7個點位, 在RobotStudio中選擇RAPID菜單,按照下列程序所示進行程序數據聲明。
程序數據聲明:
MODULE Module1
CONST robtarget home:=[[301.24,0.00,558.00],[0.00526559,0,-0.999986,0],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]]; !聲明起始點
CONST robtarget qwl:=[[322.54,426.08,287.50],[0.00526541,-4.20242E-8,-0.999986,-1.10285E-7],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]]; !聲明取料點常量
CONST robtarget fwl:=[[346.29,-282.31,297.79],[0.00526535,-1.92038E-8,-0.999986,-8.44633E-8],[-1,-1,-1,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]]; !聲明放料點常量
VAR num i; !聲明循環次數計數變量
VAR robtarget qwls; !聲明取物料點上方變量
VAR robtarget fwls; !聲明放物料點上方變量
VAR robtarget fwl2; !聲明放物料點到位變量
5.3 編寫main函數
PROC main() !主函數
Movej home,v300,fine,tool0\WObj:=wobj0; !運動到起始點
FOR i FROM 0 TO 14 DO !循環 15 次,取放 15 個物料
qwls:=offs(qwl,0,0,30); !計算取料點上方點位
MoveL qwls,v300,fine,tool0\WObj:=wobj0; !運動到傳送帶取物料位置上方
WaitDI di_csd,1; !等待輸入信號 di_csd 為 1,即等待傳送帶物料到位
MoveL qwl,v300,fine,tool0\WObj:=wobj0; !運動到取料點位置
set do_xp; !吸盤置 1,執行夾取動作,夾取物料
WaitTime 0.5; !等待 0.5s,以夾穩物料
MoveL qwls,v300,fine,tool0\WObj:=wobj0; !提升到取料點上方位置
IF i<5 THEN !如果 i<5
fwls:=offs(fwl,0,i*42-36,40); !運動到第一層放料點位置上方
fwl2:=offs(fwl,0,i*42-36,0); !運動到第一層放料點位置
ELSEIF i<9 THEN !否則 5<=i<9
fwls:=offs(fwl,0,(i-5)*42-16,80); !運動到第二層放料點位置上方
fwl2:=offs(fwl,0,(i-5)*42-16,20); !運動到第二層放料點位置
余下循環程序可根據9<=i<12 ,12<=i<14, i=14,可依次運動到第三層、第四層、第五層的放料點,
設置放料點程序如下:
MoveL fwls,v300,fine,tool0\WObj:=wobj0; !移動到放料點上方
MoveL fwl2, v300, fine, tool0\WObj:=wobj0; !慢速下落到放料點位置
reset do_xp; !吸盤置 0
WaitTime 0.5; !等待 0.5s ,以放穩物料
ENDFOR ! 結束 FOR 循環
Movej home,v300,fine,tool0\WObj:=wobj0; !運動到起始點
Stop; !停止本次循環
ENDPROC ! 結束 main 函數
ENDMODULE !結束 MODULE
5.4 程序導入機器人工作站
在RobotStudio軟件中,點擊“RAPID”菜單,在左側列表中,展開RAPID接點,右鍵單擊程序模塊“module1”,然后選擇“保存模塊為…”,選擇保存位置,然后點擊“保存”按鈕。加載模塊到真實工作站,要保證電腦與真實工作站的控制器通過網線連接。在RobotStudio中,新建空工作站,添加“IRB120”機器人,然后在“控制器”菜單中,點擊“添加控制器”子菜單中的“一鍵連接…”,連接到真實工作站中的控制器 在“控制器”列表中將出現服務端口及其下面列出的控制器系統,展開接點到“T_ROB1”,右鍵點擊該節點,從彈出菜單中選擇“加載模塊”,在打開的窗口中選擇之前保存的模塊,然后點擊“打開”按鈕,如果原有工作站有同名的模塊,則會出現一個對話框,詢問是否覆蓋同名的模塊,這里點擊“是”。
5.5 點位示教
示教home點,將機器人的末端工具,調整為垂直向下狀態,此點為home點,在示教器的“程序編輯器”中,打開main例行程序,在代碼中點擊MovJ 后面home,選擇下方的“修改位置”,完成home點的示教。示教取料點,取物料目標點要保證夾住物料時不改變位置,在代碼中點擊MovL后面qwl,選擇下方的“修改位置”,完成qwl點的示教。示教放料點,示教放物料目標點(點位名稱fwl)時,應當夾著物料進行示教。在代碼中點擊MovL 后面fwl,選擇下方的“修改位置”,完成 fwl點的示教。
6 仿真運行
在RobotStudio的仿真設定中不需要仿真機器人,在“仿真”菜單中點擊“仿真設定”,在仿真設定窗口中取消“system1”后面的勾選,關閉仿真設定窗口。在“仿真”菜單中,點擊“重置”從列表中選擇“初始狀態”,使工作站和機器人恢復到運行的起止狀態位置。
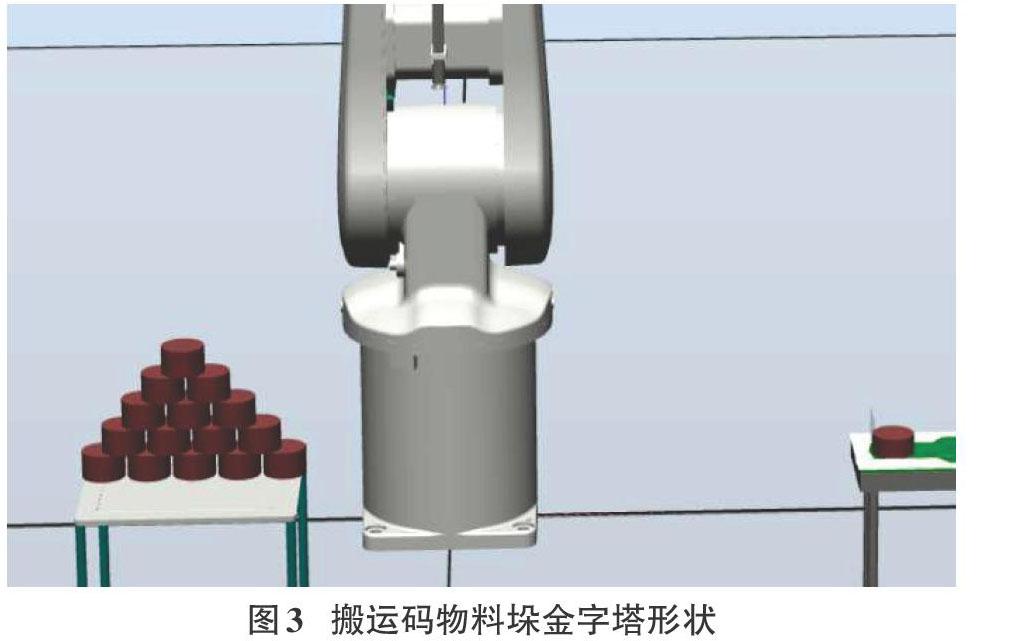
機器人開啟自動,在“控制器”菜單中點擊“控制面板”,在右側出現“控制面板”窗口,在窗口中將操作模式選擇為“自動”,點擊“電機按鈕”給電機上電。在“仿真”菜單中,點擊“播放”按鈕,開始仿真,“I/O仿真器”窗口中選擇系統為“工作站信號”,在下面出現start和stop兩個按鈕,點擊“start”將啟動機器人和傳送帶的運行。按下“stop”將停止機器人的運行,再次點擊“start”機器人將繼續運行。最終實現如圖3所示金字塔形狀搬運碼垛功能。
參考文獻:
[1] 李勇.基于RobotStudio的碼垛機器人智能工作站仿真的探究[J].科技資訊,2018,16(28):31-32.
[2] 李鵬,顧立志,李輝,等.基于Robotstudio的碼垛機器人工作站構建的仿真研究[J].內燃機與配件,2019(18):252-253.
[3] 黃明鑫,惠為東.基于RobotStudio的機器人碼垛工作站仿真研究[J].南方農機,2018,49(23):43-44,51.
[4] 蘇士超.基于RobotStudio的搬運碼垛工作站仿真設計[J].電腦知識與技術,2020,16(32):235-236.
【通聯編輯:梁書】
