基于硬件在環的EPB功能邏輯測試
2021-08-04 11:08:28史雪純唐程光
汽車電器 2021年7期
史雪純,王 瑋,溫 敏,唐程光
(江淮汽車集團股份有限公司技術中心,安徽 合肥 230601)
隨著科學技術的不斷發展和進步,人們對汽車安全性的要求與日俱增,而優異的制動性能以及一體化的底盤綜合控制技術是現代汽車安全性的重要標志[1]。電子駐車制動控制系統以電子控制器和電機取代了傳統制動裝置所使用的拉索及傳動機構[2],該系統不僅實現了車輛的駐車功能,同時還增加了一系列的自動控制功能,有效提升了客戶使用舒適度。但針對該電子控制系統的功能測試也提出了新的要求。
傳統實車搭載驗證的方式,其測試與整改周期長、場地環境要求高、人員安全風險大等缺點逐漸難以適應汽車廠家不斷壓縮的研發周期和預算,而近年來HIL測試技術的發展為各類控制器系統的測試提供了有效支撐,也是V字開發流程中重要的一環。本文基于HIL仿真測試系統,為EPB的功能策略提供了新的驗證方法。
1 EPB系統原理
1.1 系統原理
EPB電子駐車系統主要分為兩種類型,拉索式和集成式EPB,集成式EPB又分為獨立ECU式EPB與集成ECU式EPB(也叫做EPBi),兩者的區別在于EPB的控制器是否與ESC控制器進行集成,目前市場上主流的應用方式為EPBi[3]。本文涉及到的測試對象也是所述的EPBi控制系統。
EPBi控制系統,其EPB控制器集成于ESC控制器中,省去了一個控制器,成本得以下降,同時集成度提高后使得兩個控制器間的交互更加快速與高效,聯動功能更豐富、可靠性更高。控制器硬件上雖達到了集成的效果,但EPB與ESC軟件的開發及外圍硬件負載設計還是由不同的公司進行開發。圖1主要描述了EPBi的系統原理。
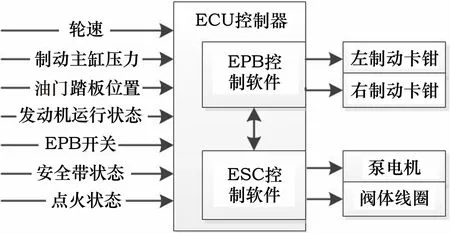
圖1 集成式EPB系統原理
1.2 EPB功能策略
EPB除了具備常規駐車功能外,還可以提供動態制動、自動駐車/釋放、溜坡再夾等功能,這些功能極大地提高了駕駛的舒適性和安全性[3]。功能項均具有其前置條件和觸發條件,只在前置條件滿足的狀態下方可以進行測試,具體介紹詳見表1。
2 HIL測試系統
2.1 HIL測試架構
硬件在環測試系統是以實時處理器運行仿真模型來模擬受控對象的運行狀態,通過I/O接口與被測的ECU連接,對被測ECU進行全面、系統的測試[4]。本文所述的測試臺架是基于dspace公司的硬件在環測試系統,主要由上位機、實時處理器、I/O板卡及運動仿真轉臺組成,如圖2所示。
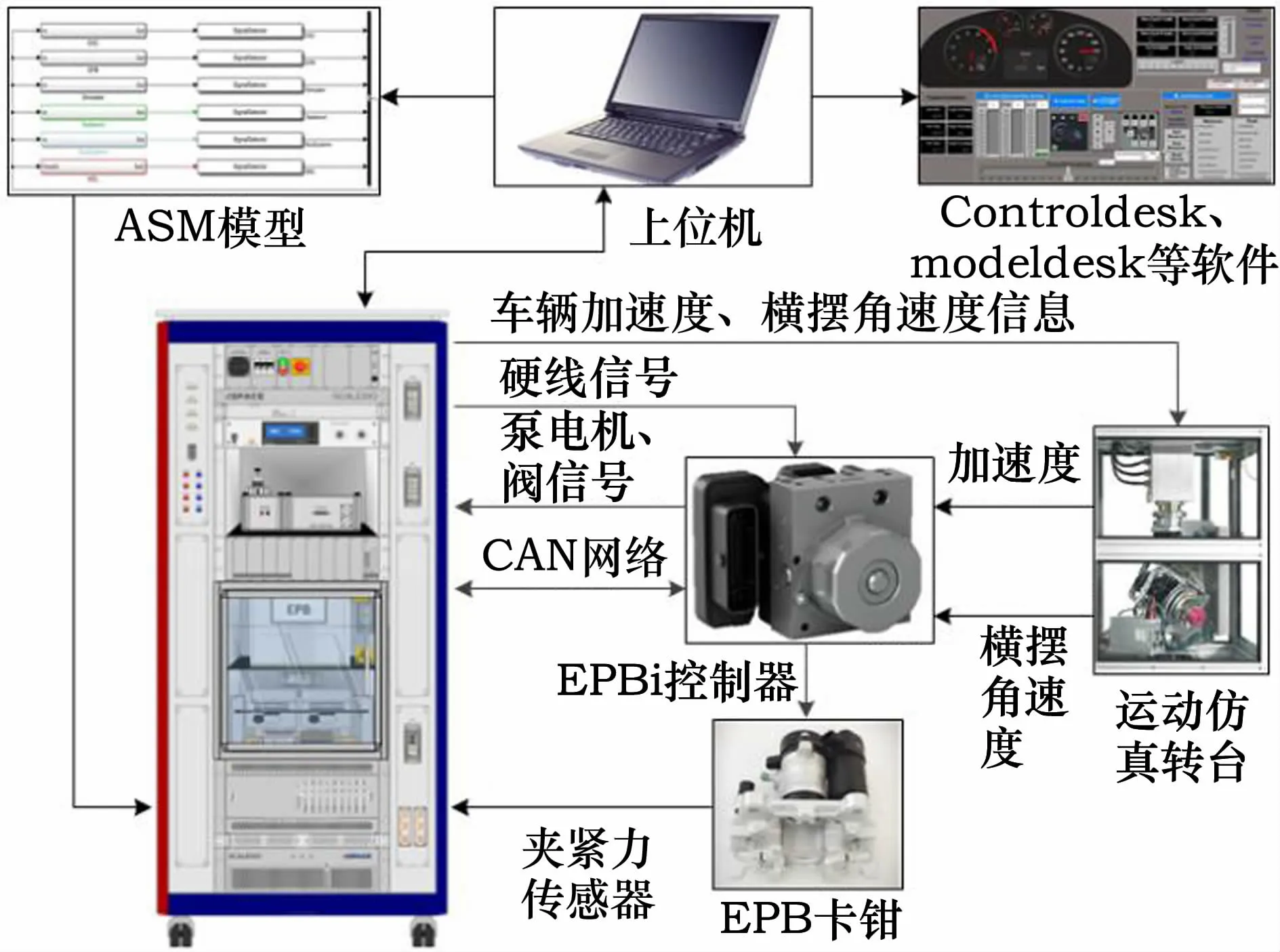
圖2 HIL測試架構圖
其中上位機主要負責運行dspace相關的工具鏈軟件,主要包括測試交互軟件controldesk、I/O配置軟件configurationdesk、模型參數化軟件modeldesk,以及將仿真模型下載至實時處理器等功能;實時處理器主要運行車輛動力學模型,并根據I/O板卡間的通信實時仿真車輛狀態;I/O板卡主要負責實時處理器與ECU之間的數據轉換與通信,一方面將控制器或執行器輸出的電氣信號轉換為邏輯值輸入至車輛動力學模型,另一方面也將車輛動力學輸出的邏輯值轉換為電氣信號輸入至ECU控制器;運動仿真轉臺的作用為坡度、加速度、橫擺角速度的模擬,通過3組電機分別控制ESC控制器的橫向、縱向側傾角與垂向旋轉速度,對集成于ESC控制器內部的加速度及橫擺加速度傳感器施加作用,從而模擬出縱向加速度、橫向加速度以及橫擺角速度[5]。
2.2 仿真模型
仿真模型主要由車輛仿真模型和I/O接口模型組成,車輛仿真模型主要負責虛擬車輛動力學性能的實時計算,I/O接口模型主要提供仿真模型與控制器之間的實時交互信息。
車輛仿真模型為dspace商業ASM(Automotive Simulation Models)模型,主要包括發動機模型、傳動系模型、動力學模型等。為實現更好的仿真效果,需要對車輛關鍵參數進行整理,見表2。并通過modeldesk軟件固化至ASM模型中,編譯后完成仿真模型的標定。
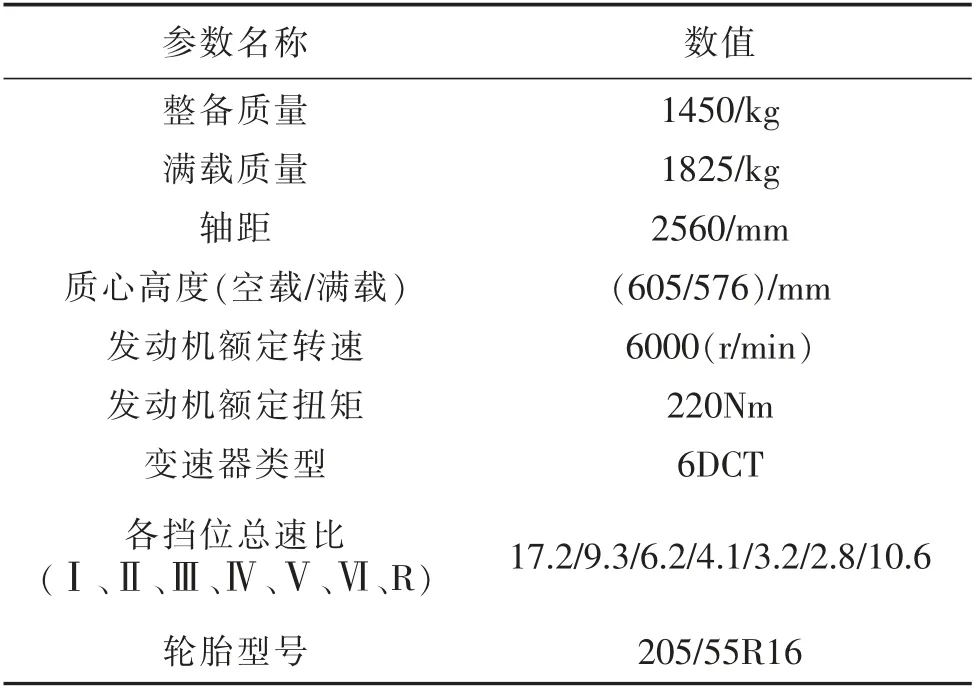
表2 車輛主要參數
I/O接口模型主要由傳感器、執行器、CAN總線仿真模塊等組成。傳感器模塊可根據各自的電氣特性,在Simulink模型中搭建接口模型,機柜根據車輛動態模型計算的傳感器參數,仿真發送至控制器;執行器模塊通過機柜采集回來的控制器輸出信號,經過解析后再提供至車輛動態模型,形成閉環模型控制系統,見圖3。
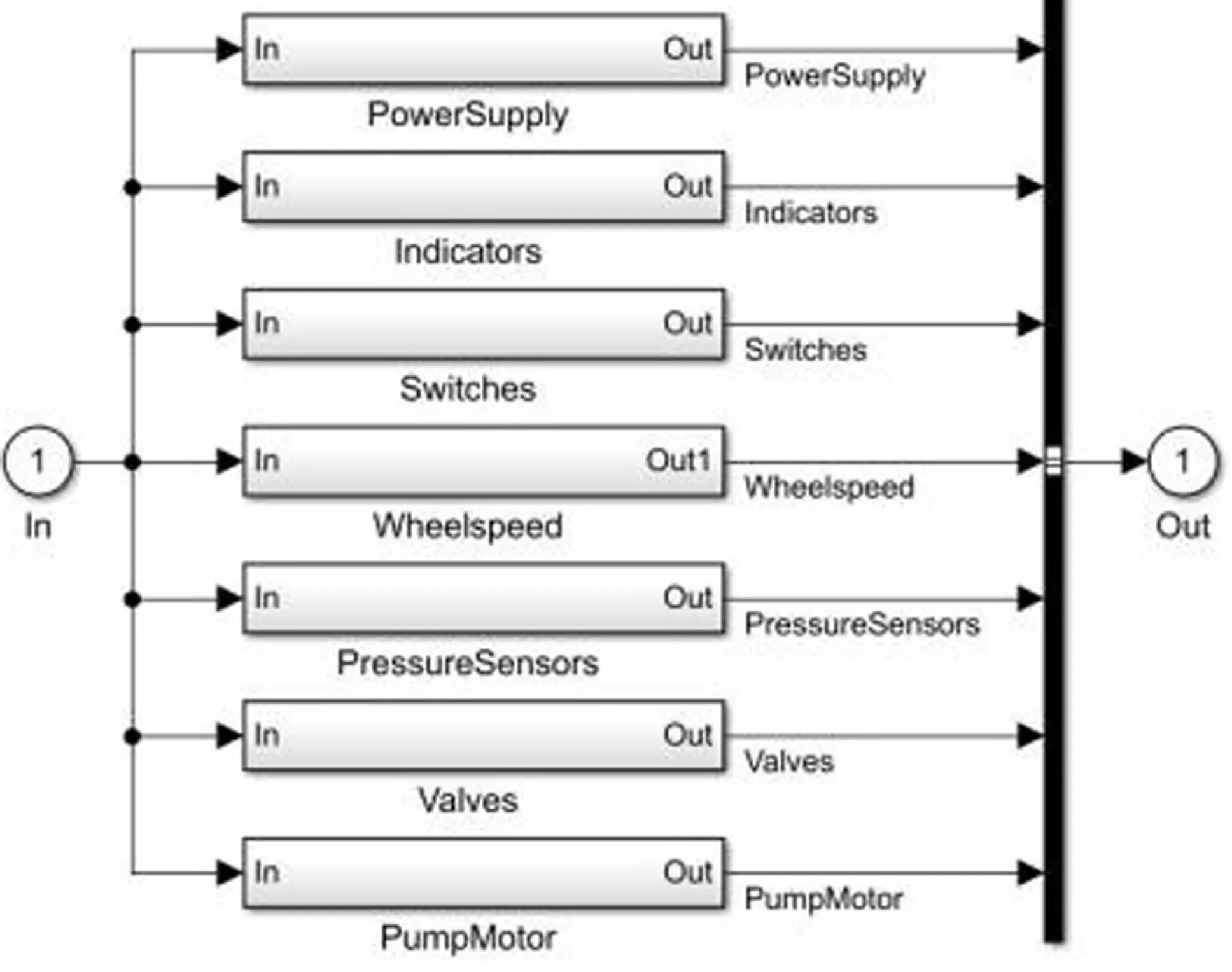
圖3 I/O接口模型
CAN總線仿真模塊,利用RTIcan板卡實現信號仿真的功能。其根據測試節點的CAN信號收發定義,將該測試節點需要接收的其它節點進行虛擬仿真;同時,RTIcan板卡接收測試節點的CAN報文,并用于交互界面的顯示及模型調試。RTIcan模型見圖4。
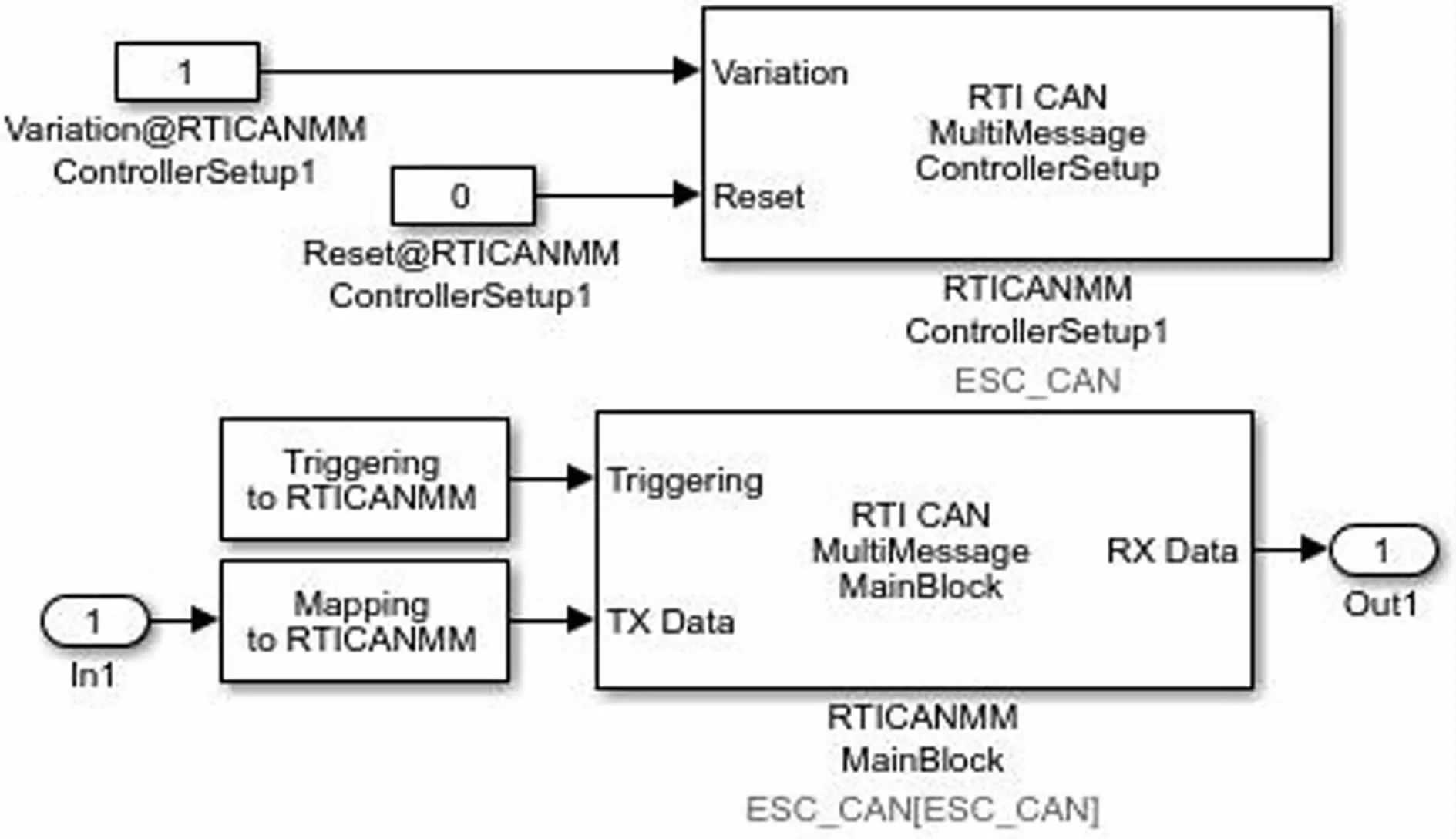
圖4 RTIcan接口模型
3 測試結果
根據上表的功能策略制定相應的測試方案,分別對各項功能策略進行HIL測試驗證,結果如下。
1)手動駐車/釋放策略驗證(圖5):初始條件為IGN ON,車速為0km/h,EPB顯示狀態為2(Released),滿足駐車釋放條件,第3s EPB開關拉起,狀態由0(NO request)→2(Apply request),EPB狀態由2(Released)→4(Applying)→1(ParkApplied),夾緊過程結束。10s后為釋放策略驗證,此時制動為踩下狀態,主缸壓力約為25bar,初始條件滿足。11s左右EPB開關按下,狀態由0(NO request)→1(Release request),EPB狀態由1(ParkApplied)→5(Releasing)→2(Released),釋放過程結束。手動駐車/釋放策略滿足功能邏輯需求。
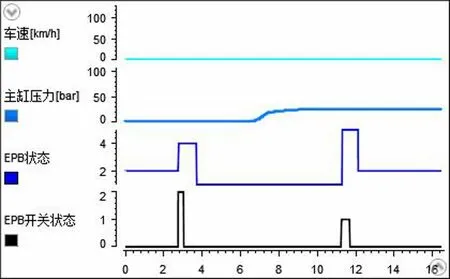
圖5 手動駐車/釋放策略
2)熄火自動駐車策略驗證(圖6):初始車速為0km/h,發動機怠速,EPB處于釋放狀態,滿足要求。7s時點火開關狀態由3(IGN ON)→-1(IGN OFF),此時EPB狀態由2(Released)→4(Applying)→1(ParkApplied),完成自動駐車過程。熄火自動駐車策略滿足功能邏輯需求。
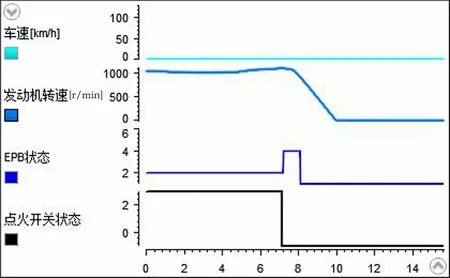
圖6 熄火自動駐車策略
3)解安全帶自動駐車策略驗證(圖7):初始車速為50km/h,此時踩下制動踏板車輛減速至0km/h,Autohold功能激活(功能開關已提前打開),第15s時初始狀態滿足要求。22s時解開主駕安全帶,其狀態由1(belted)→0(unbelted),此時EPB狀態由2(Released)→4(Applying)→1(ParkApplied),自動駐車過程完成后,Autohold功能退出。解安全帶自動駐車策略滿足功能邏輯需求。
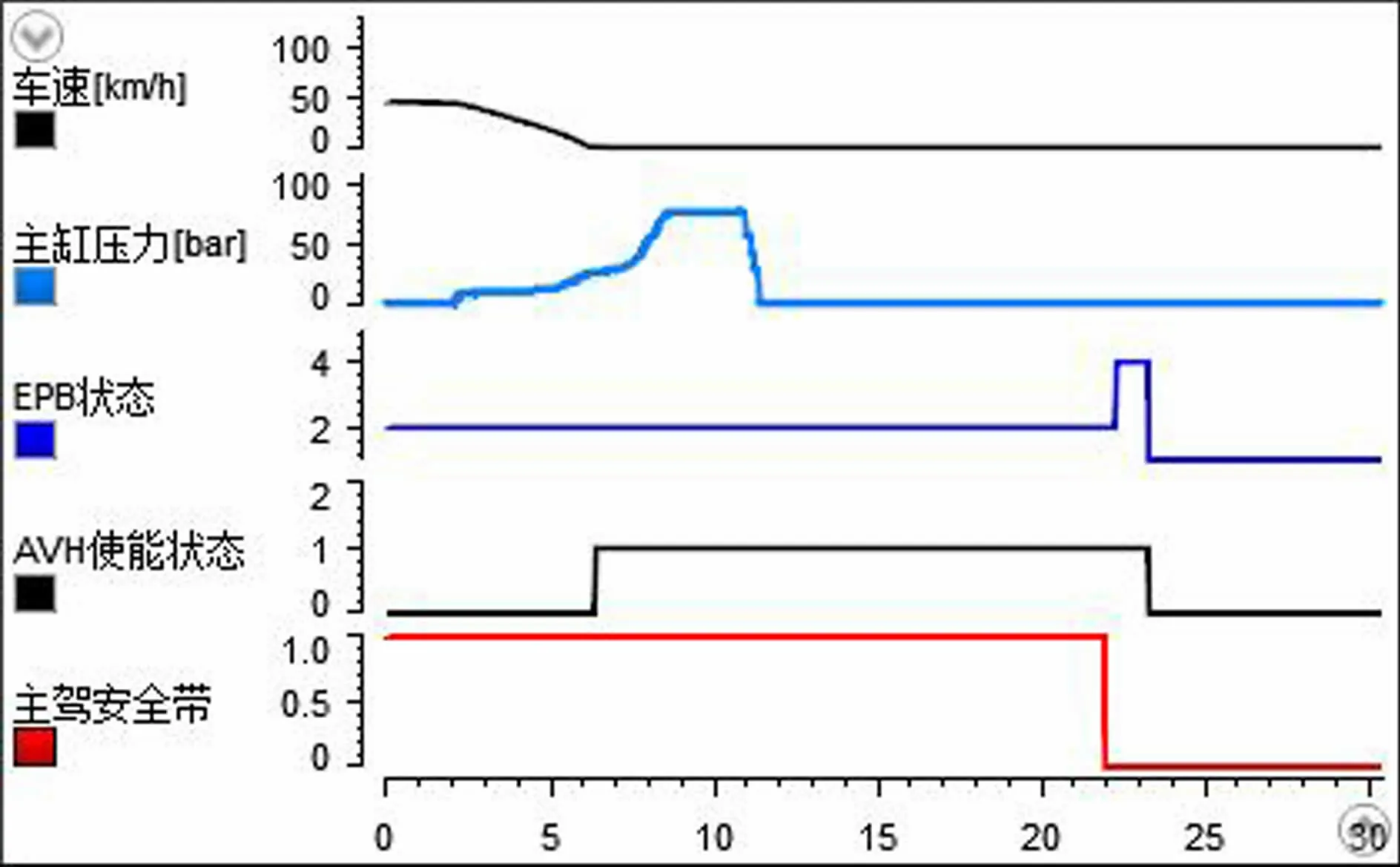
圖7 解安全帶自動駐車策略
4)自動釋放策略驗證(圖8):初始車速為0km/h,發動機怠速,EPB為夾緊狀態,主駕安全帶已系上,擋位為D擋,初始狀態滿足要求。第8s時踩下油門踏板,EPB狀態由1(ParkApplied)→5(Releasing)→2(Released),EPB自動釋放車輛行駛。自動釋放策略滿足功能邏輯需求。
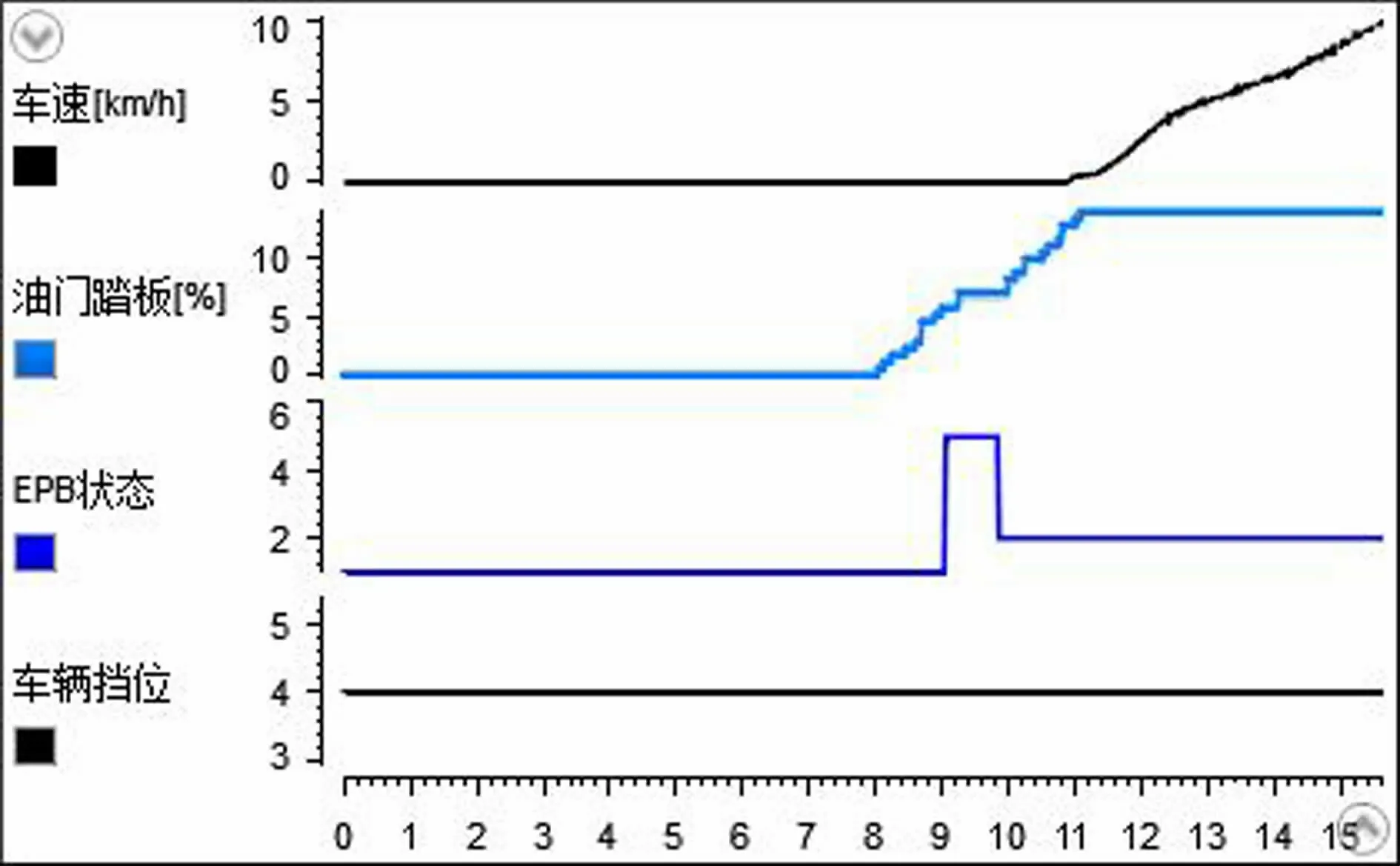
圖8 自動釋放策略
5)ECD請求駐車策略驗證(圖9):初始狀態為車速45km/h,EPB為釋放狀態,滿足要求。第8s時拉起EPB開關,EPB狀態由2(Released)→6(dynamicBraking),11s時車輛完全停止,EPB開始夾緊動作并在12s時完成夾緊動作,最終狀態變為1(ParkApplied),車輛完成減速至停止并駐車。ECD請求駐車策略滿足功能邏輯需求。
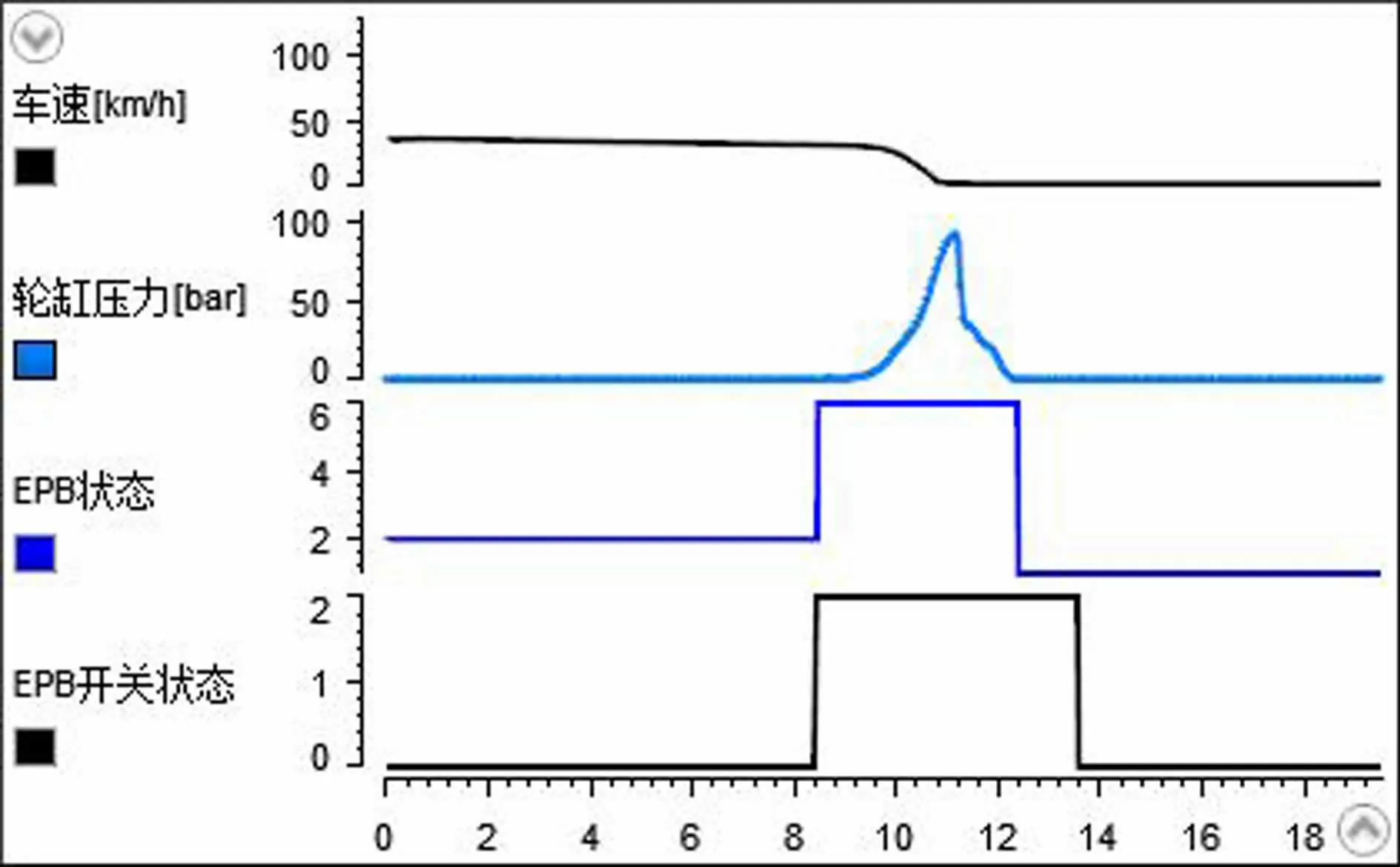
圖9 ECD請求駐車策略
6)溜坡再夾緊策略驗證(圖10):初始條件EPB狀態為駐車,第9s時對輪速傳感器施加固定的輪速脈沖信號,可以看出若干個輪速脈沖信號后,EPB執行再夾緊動作,EPB卡鉗夾緊力由初始狀態的平均4900N增加為5300N。溜坡再夾緊策略滿足功能邏輯需求。
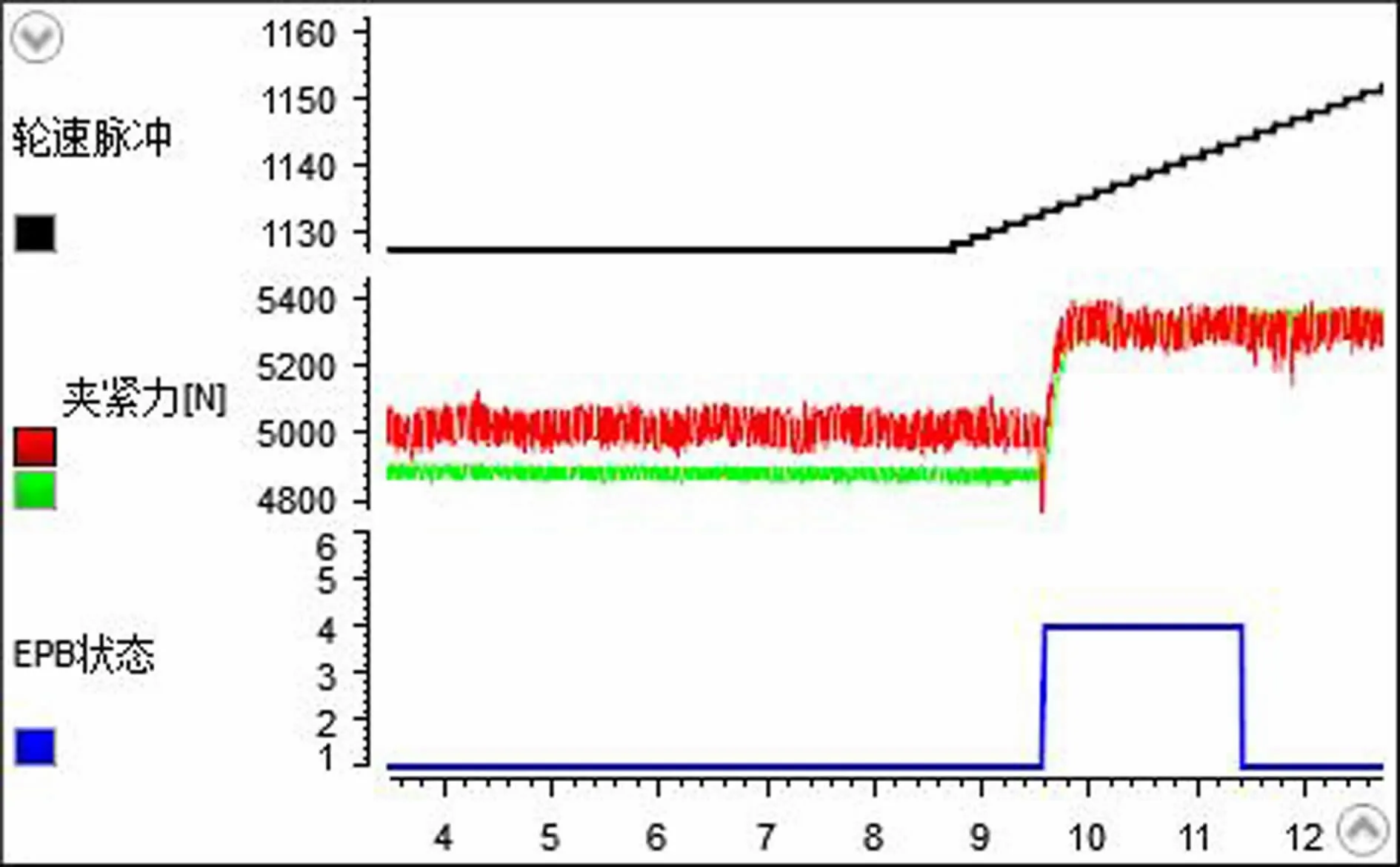
圖10 溜坡再夾緊策略
7)坡道自適應夾緊策略驗證(圖11):坡度為0的情況下,5s時請求EPB夾緊,此時EPB卡鉗平均夾緊力約為5000N;20s時釋放EPB并將坡度逐步加載為8%,26s時再次請求EPB夾緊,此時EPB卡鉗平均夾緊力約為5500N,大于沒有坡度時的夾緊力。坡道自適應夾緊策略滿足功能邏輯需求。

圖11 坡道自適應夾緊策略
4 結論
1)本文對電子駐車系統的原理與策略進行了詳細介紹,并根據其邏輯策略定義測試方案并完成驗證。
2)綜合以上,電子駐車系統的功能邏輯可以通過HIL測試的手段進行驗證,相對實車驗證具有效率高、開發成本低等優點,邏輯功能驗證上可替代實車驗證。
3)本文僅驗證了初始條件滿足狀態下的EPB功能邏輯實現,缺少條件不滿足狀態下的逆向驗證,作為下一步提升的方向,該方法可驗證程序是否存在漏洞,并擴展測試覆蓋度。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中華詩詞(2022年6期)2022-12-31 06:41:24
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
數學大世界(2018年1期)2018-04-12 05:39:14
中國科技論壇(2017年7期)2017-07-25 08:49:53
光學精密工程(2016年6期)2016-11-07 09:07:19
時代英語·高三(2014年5期)2014-08-26 02:49:51