機載任務設備控制模塊自適應BIT檢測電路設計
2021-08-04 08:36:52崔利軍李飛晟陳秋豐韓大全
計算機測量與控制 2021年7期
張 晨,崔利軍,李飛晟,陳秋豐,韓大全
(1.空間物理重點實驗室,北京 100076;2.太原衛星發射中心,太原 030027)
0 引言
某型無人機系統要求最大起飛重量不超過10 kg,具備執行不同任務可掛載不同任務設備的能力,任務設備涉及光電、紅外、雷達等類型。系統應可控制上述不同任務設備,并應對任務設備控制指令傳輸情況和任務設備工作狀態進行實時監測。
從上述系統要求看,飛機平臺體積小,任務設備多樣化,工作模式多樣化,因此導致任務設備控制與實時監測實現相對復雜,進而給機載任務控制器的工作可靠性與通用性提出了更高要求。該型無人機重量與體積指標的嚴苛要求,使得機載任務設備控制器不具備單獨的安裝空間,為了適應機載狹小空間工作環境,系統采用將任務設備控制器電路嵌入機載計算機內,以基于機載計算機CPU為核心的硬件架構,形成一個機載計算機內的嵌入式任務設備控制模塊,以減小體積和節能降耗,從而滿足設計要求。
對任務設備工作狀態的實時監測是無人機執行任務作業的基本要求,也是任務控制模塊工作的基本可靠性指標要求之一。因為控制模塊工作正常與否,直接影響任務設備的作業安全,因此實時監測控制模塊的工作狀態以及任務設備工作情況尤為重要。
目前,作為系統測試和故障診斷與隔離的一種自檢手段,BIT技術[1]被廣泛應用于航空電子設備可靠性、維護性、測試性與安全性設計中。下面將對任務設備控制模塊BIT檢測電路設計展開詳細討論。
1 任務設備控制模塊組成
如圖1所示,根據測試要求,任務設備控制模塊的設計可由機載計算機、數字驅動、模擬驅動、BIT檢測電路、供電單元組成。其工作過程是機載計算機接收來自無線電數據鏈上行遙控信道的任務設備控制指令,經過解碼、譯碼后輸出開關控制量,分別送給數字驅動、模擬驅動和BIT檢測電路。各驅動電路對控制量信號進行適配轉換后,再分別傳到任務設備和BIT檢測電路。任務設備接收到控制量后執行作業動作,并將作業動作執行結果反饋給BIT檢測電路。
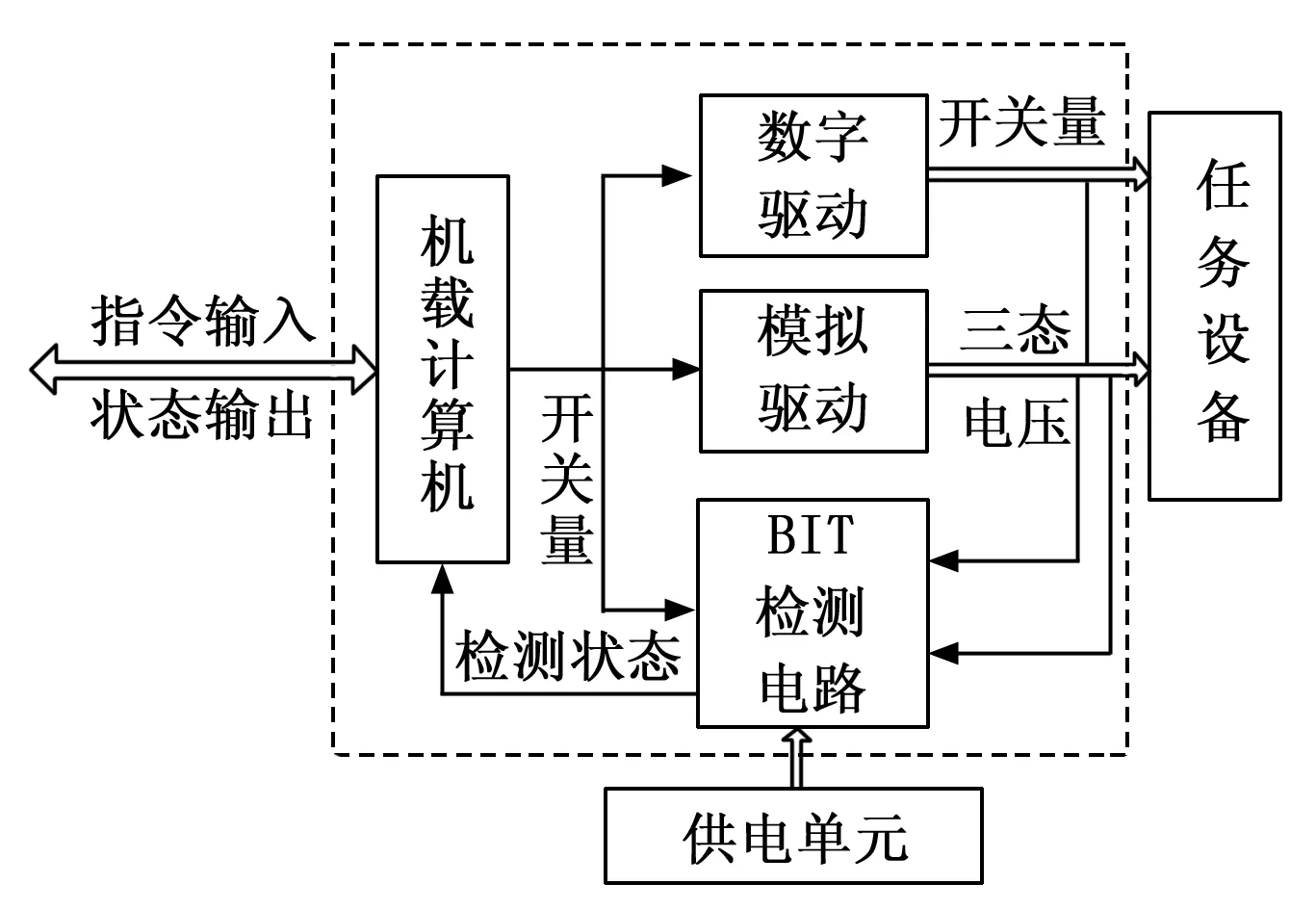
圖1 控制模塊組成框圖
BIT檢測電路主要檢測機載計算機控制指令的輸出與驅動輸出結果正確情況,分別回采機載計算機輸出的控制量、數字驅動的開關控制量和模擬驅動的三態電壓控制量,采集結果與機載計算機輸出進行比對,完成回繞式BIT檢測,然后將比對結果以狀態形式,經機載計算機進行遙測數據的組幀編碼,再由無線電數據鏈的下行遙測信道傳至地面站,對任務設備工作狀態進行實時監控。這里遙測數據幀給任務控制設備的BIT檢測的容量分配是一個字節共計8 bit數據內存。
2 BIT檢測電路設計
2.1 設計分析
圖1中,BIT檢測電路的輸入信號包含了開關量、多種狀態電壓兩種類型。其中開關量是二進制數字信號,機載計算機CPU的I/O口可直接識別,可通過數字整形電路直接輸入機載計算機I/O口進行采集。
而模擬驅動輸出的是一個端口多種狀態電壓形式的信號控制量,顯然與機載計算機CPU的I/O口電平不匹配。
這里,以某光電任務設備攝像機的控制模式為例,該型無人機對攝像機具有控制電源開/關、焦距長/短、鏡頭遠/近、光圈大/小的功能要求,其中,電源開/關為二進制數字信號的控制量,可由數字整形電路隔離后,直接進入機載計算機采集。而焦距、鏡頭與光圈的控制則為1路信號線上有3種形式的電壓信號,分別為(+3~+6 V)、0 V、(-3~-6 V)。其中,正電壓定義為焦距變長、鏡頭變遠、光圈變大的控制,0 V定義為焦距、鏡頭、光圈停止的控制,負電壓定義為焦距變短、鏡頭變近、光圈變小的控制。
從3種控制電壓看,0 V可視為二進制信號的TTL低電平,和機載計算機I/O口信號直接對接;正電壓(+3~+6 V)也可以通過信號衰減、整形變為TTL高電平,與機載計算機I/O口信號對接;但是負電壓信號(-3~-6 V)就不同了,機載計算機的數字I/O無法識別。因此,必須對其進行相應的信號處理,把負電壓變為二進制數字信號,即把現有的一個端口上的3種狀態的電壓信號,轉換為CPU可識別的二進制的數字狀態信號,方可進行電壓采集。
2.2 基于A/D轉換的BIT檢測方案
上述分析可以看出,針對(+3~+6 V)、0 V、(-3~-6 V)3種電壓,若僅考慮信號類型的轉換,一般很容易想到通常使用基于CPU控制的模/數轉換電路來實現,也就是圖2所示的以機載計算機CPU為核心的的信號轉換檢測方案,即三態電壓經過信號調理電路后,由機載計算機控制,通過傳統的模/數轉換電路A/D轉換器[2]來完成單端口三態電壓的信號采集。
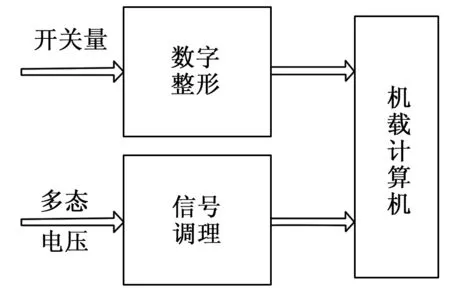
圖2 傳統BIT檢測電路設計方案
圖2電路設計時選擇適合3種電壓范圍的A/D轉換器,將其轉換為并行或串行二進制數字信號后,通過數字I/O口進入機載計算機完成信息采集。下面繼續用攝像機其中一路信號“焦距”控制為例,給出基于A/D轉換器的BIT檢測電路,如圖3所示。由于輸入是過零雙極性電壓信號,所以A/D轉換器需選擇雙電源供電的ADC芯片。考慮此處信號轉換目的是把電壓信號轉換為數字狀態信號,焦距控制電壓盡管出現了3種狀態,但并非是連續的模擬電壓信號,于是降低了信號轉換精度和量化單位指標的指標要求。因此,這里選取的A/D轉換器是目前市場供貨充足、具有雙電源供電、且帶有8路模擬開關的8位模數轉換芯片AD570。圖3中部分信號連接屬性如下:
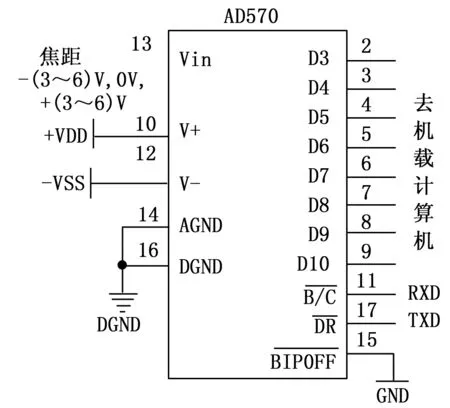
圖3 基于A/D570的BIT檢測電路
PIN13:連接輸入的焦距控制信號,即直流電壓(-3~-6 V)、0 V和(+3~+6 V);
PIN10與PIN12:為供電輸入。分別接入+12 V與-12 V直流電源;
PIN10:為片選信號。與機載計算機的I/O口連接,當機載計算機I/O給此管腳輸入高電平時開始A/D轉換,輸入低電平時禁止A/D轉換;
PIN17:為轉換結束標志。與機載計算機的另一個I/O口連接,進行A/D轉換時此管腳輸出高電平,A/D轉換結束時輸出低電平。
8位量化單位是0~255,對應十六進制表示為00H~FFH。因此,3個電壓中若最高值+6 V對應數字量表示為FFH,則0 V對應數字量表示為7FH,最低值-6 V對應數字量表示為00H。
當輸入信號分別是-6 V、0 V、+6 V時,機載計算機控制A/D570的PIN10片選信號依次轉換,分別得到一個字節8 bit的00H、7FH或FFH數據,也就是焦距對應的長焦、停止變焦、短焦3個工作狀態的BIT檢測結果,需要占用1個字節的存儲空間。換而言之,轉換1路焦距需要1個字節數據存儲單元,若加上鏡頭和光圈2路工作狀態,則檢測數據共需要3個字節24 bit的數據存儲空間。
顯然,這不滿足系統給定的BIT檢測容量分配一個字節的指標要求。也就是說要實現攝像機一種任務設備的BIT檢測,不僅要增加硬件電路數量,導致體積增大與可靠性降低,而且還要占用機載計算機更多的數據內存空間和遙測數據幀字節,進而導致無線電數據鏈信道傳輸帶寬的增加,無疑加重了信道的傳輸負擔,造成了有限資源的浪費。
3 自適應BIT檢測電路設計
為了克服基于A/D轉換器BIT檢測電路硬件電路復雜、狀態采集受控、存儲資源浪費以及無線電數據鏈信道帶寬增加等不足,必須設計一種無需控制,并能夠自動識別1個端口3種電壓狀態,進而轉換成二進制狀態數據的自適應檢測電路[3],來實現有限資源條件下任務設備的BIT狀態檢測功能。
從圖1可以看出,多種電壓狀態量來源于模擬驅動電路的輸出,該驅動電路的輸入來自機載計算機 I/O輸出的二進制編碼,因此可逆向思維考慮,如何設計一種“三變二”的逆向轉換電路,便可實現三態電壓轉換為二進制數字信號功能,也就完成了TTL電平形式的轉換。
這里,首先要解決的問題是在1路信號線上能夠自動分離出3種電壓狀態。開關量即為開關狀態量,也是二進制邏輯電平量,邏輯電平屬于數字電路系統,構成數字電路的基本單元是晶體管,也就很容易想到用半導體二極管來實現電平選擇功能。
由于半導體二極管具有單向導電的特性,在正偏壓下PN結導通,在導通狀態下的電阻很小,約為幾十至幾百歐;在反向偏壓下,則呈截止狀態,其電阻很大,利用這一特性,二極管在電路中具有控制電流接通或關斷的作用,這便具備了一個理想的電子開關功能,也就是常說的二極管的開關特性。在此,不防利用二極管正向電壓導通、反向電壓截止的開關特性,對3種狀態電壓進行篩選分離。即用兩個開關二極管設置一個正向開關和一個反向開關,當輸入正電壓時,正向開關導通,反向開關截止;輸入0 V時,正向開關與反向開關兩端等電位為0 V;輸入負電壓時,正向開關截止,反向開關導通。
由于開關二極管的導通、截至特性可自主的、選擇性的通過正電壓、0 V、負電壓信號,所以使得該電路針對不同狀態的電壓,具有了自動識別和自適應選擇的能力。這樣,既不需要機載計算機進行轉換控制,減少了機載計算機的I/O信號線,又省去了圖2中的信號調理電路A/D轉換器。
其次要解決的是非標準電壓轉換為TTL電平的轉換問題。
1)正向電壓選擇電路。正向開關的輸出端為正電壓信號,通常解決的方法是電阻分壓或正反饋放大電路,電阻分壓可以解決電平值的大小,但是一般會影響輸入/輸出回路阻抗。正反饋放大器因其工作穩定性較差,一般多用于震蕩期中。因此為了減小阻抗影響,避免正反饋放大電路不穩定性,可以采用電阻分壓結合電壓跟隨器的方式設計正向選擇電路,實現同相電平轉換,這樣既增加輸入/輸出之間的信號驅動能力,又取得了輸入/輸出信號相互隔離的效果;
2)反向電壓選擇電路。反向開關的輸出端為負電壓信號,鑒于負反饋放大電路的穩定特性,采用一級負反饋放大電路,即可實現負電壓到正電壓的轉換,從而實現反向電壓選擇。
解決了上述兩個問題,接下來就可以完成基于二極管自主電平選擇的BIT自適應三態電壓檢測電路設計,如圖4所示。
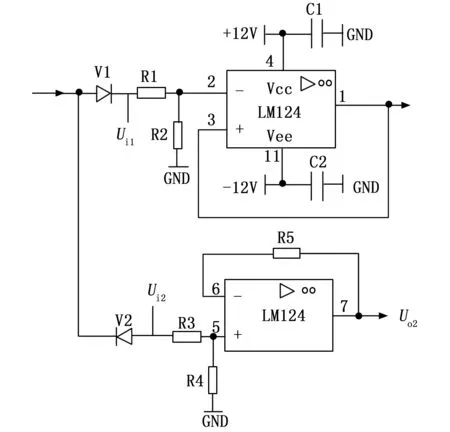
圖4 自適應三態電壓檢測電路
圖4中電壓跟隨器輸入/輸出信號關系表示為:
(1)
負反饋放大器的輸入/輸出電壓關系表示為:
(2)
式(1)與(2)中,Ui為輸入電壓,Ui1為二極管V1輸出端節點電壓,Ui2為二極管V2輸出端節點電壓,Uo1為第1路輸出電壓,Uo2為第2路輸出電壓。
同樣,由于輸入信號的雙極性特性,運算放大器也選擇雙電源供電的LM124型四運放SMT封裝芯片。C1、C2為LM124的電源濾波電容,取值均為0.1 μ;V1、V2分別是型號為BAT254的開關二極管。為了便于分析,假定輸入的3種電壓分別為+5 V,0 V和-5 V,這樣,圖4中的電阻值可設定為R1=R3=R5=10 k,R2=R4=100 k。
鑒于R2?R1,若不計二極管截止電壓,則(1)、(2)式可等效為:
Uo1≈Ui1
(3)
Uo2=-Ui2
(4)
由式(3)~(4)可得:
當Ui=5 V時,二極管V1導通,V2截止。
Ui1=Ui=5 V,Uo1=5 V,視為TTL高電平H,二進制狀態為“1”;Ui2=Ui=0 V,Uo2=0 V,視為TTL低電平L,二進制狀態為“0”;
當Ui=0 V時,二極管V1和V2的兩端電位相等。Ui1=Ui=0 V,Uo1=0 V,視為TTL低電平L,二進制狀態為“0”;Ui2=Ui=0 V,Uo2=0 V,視為TTL低電平L,二進制狀態為“0”;
當Ui=-5 V時,二極管V1截止,V2導通。
Ui1=Ui=0 V,Uo1=0 V,視為TTL低電平L,二進制狀態為“0”;Ui2=-5 V,Uo2=+5 V,視為TTL為高電平H,二進制狀態為“1”。
將上述計算結果對應為二進制狀態真值可匯總表1所示。顯然,真值表結果辨明,圖4完全能夠實現單端口三態電壓轉換為兩種電平狀態、并進行電平自動識別的功能。

表1 輸入/輸出信號狀態真值表
4 仿真驗證與分析
4.1 仿真驗證
為了驗證圖4設計的BIT檢測電路輸出結果正確性,將此電路進行了仿真驗證,結果如圖5所示。圖中示波器的3個通道電壓均設置為每格5 V。其中,通道1上面曲線為輸入電壓Ui;通道2中間曲線顯示Uo1的輸出電壓;通道3下面曲線顯示Uo2的輸出電壓。
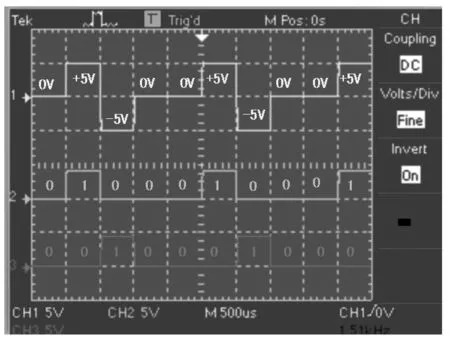
圖5 自適應BIT檢測電路仿真結果
從此仿真結果可以看出,當通道1的輸入電壓為0 V時,通道2、3輸出電壓約5 V,均對應為TTL低電平,二進制狀態為“00B”;
當通道1的輸入電壓為+5 V時,通道2輸出電壓約+5 V,對應為TTL高電平,通道3輸出電壓為0 V,對應為TTL低電平,二進制狀態為“10 B”;
當通道1的輸入電壓為-5 V時,通道2輸出電壓為0 V,對應為TTL低電平,通道3輸出電壓約為+5 V,對應為TTL高電平,二進制狀態為“01 B”;
對比表1的計算結果,顯然二者完全擬合。充分證明基于A/D轉換器的BIT檢測電路,經過基于二極管的自適應BIT檢測電路優化后,實現了“三轉二”,即單端口三態電壓轉換為兩種電平形式的功能,且優化后的檢測電路,既能滿足機載計算機的輸入電平要求,又能完成3種電壓的自動分離與狀態識別,進而實現BIT狀態檢測。
4.2 驗證結果分析
由于經過電平轉換后輸出的二進制碼“10B”、“00B”、“01B”分別代表著不同的高低電平,因此,針對攝像機焦距而言,一路狀態量的3種電壓,經過轉換后檢測信號只有兩種電平狀態,僅有2 bit的數據,占一個字節的1/4,再加上鏡頭和光圈2路,也就是6 bit的數據,3路合用不到一個字節的數據緩沖區。這既滿足了前述的一個字節的容量分配指標,又可以可根據用戶需求,自行調整圖5中的兩個狀態的高低電平順序,同時,輸入電壓也可通過調整輸入信號的分壓電阻R2和反饋電阻R5的阻值,來改變輸入與輸出電壓的大小,以適應不同的任務設備或同一任務設備的不同狀態控制量采集。
進一步分析優化后的自適應BIT檢測電路發現,對攝像機一種光電任務設備而言,與常規的基于模/數轉換器的檢測電路相比,自適應檢測電路體積僅占常規檢測電路種A/D570轉換器芯片體積的1/8、所選四運算放大器LM124芯片市場價格僅是A/D570的1/40。由此看出,僅調理電路一部分,就使體積縮小了75%,成本降低了40倍,且基于A/D設計方法中占用的3個字節(24 bit)數據緩沖區降低為6 bit的數據緩沖區,節約了3倍的有限資源,特別是器件數量減少,收獲了系統可靠性增長[4]的效果,有效保障了任務設備控制與運行的安全性。
5 結束語
仿真分析與驗證為BIT檢測電路的設計提供了正確依據。目前,該電路已成功應用于某型無人機機載任務設備控制模塊中,并經歷了百余小時多個起落的動態飛行驗證。實際應用表明,優化后的BIT檢測電路,完全滿足設計功能與性能指標要求,特別是其具有的自動識別與有效分離電壓狀態的自適應特點,進一步省去了機載計算機參與控制的程序編寫工作,減少了軟件設計、軟件測試、軟件第三方認證以及軟件設計文檔等多重工作量,大大節約了人力資源,降低了人工成本,縮短了研制周期。同時,其擁有體積小、成本低、可靠性高的優越指標,被推廣應用于其他型號無人機系統的同類產品、機載航空電子產品、數據鏈產品以及地面站控制設備中。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
小學科學(學生版)(2021年7期)2021-07-28 06:44:42
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
科技傳播(2019年22期)2020-01-14 03:06:34
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年11期)2018-08-04 03:25:42
消費導刊(2017年20期)2018-01-03 06:26:40
工業設計(2016年12期)2016-04-16 02:52:00
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25