基于自抗擾的沖壓發(fā)動(dòng)機(jī)導(dǎo)彈大過載機(jī)動(dòng)控制
2021-08-04 08:53:22施雨陽彭雪峰曲利峰沙建科
兵器裝備工程學(xué)報(bào) 2021年7期
關(guān)鍵詞:指令發(fā)動(dòng)機(jī)
施雨陽,彭雪峰,曲利峰,沙建科
(1 四川航天系統(tǒng)工程研究所,成都 610100;2 上海航天機(jī)電工程研究所,上海 201109;3 陸軍裝備部駐成都地區(qū)第三軍代室,成都 610000)
1 引言
沖壓發(fā)動(dòng)機(jī)在比沖方面比固體火箭發(fā)動(dòng)機(jī)具有明顯優(yōu)勢(shì),導(dǎo)彈發(fā)射質(zhì)量一定的情況下,采用沖壓發(fā)動(dòng)機(jī)比采用固體火箭發(fā)動(dòng)機(jī)的射程顯著增加,因此沖壓發(fā)動(dòng)機(jī)被視作下一代空空導(dǎo)彈、反艦導(dǎo)彈、反輻射導(dǎo)彈的首選動(dòng)力裝置。然而采用沖壓發(fā)動(dòng)機(jī)作為動(dòng)力的導(dǎo)彈,其彈體、推進(jìn)、姿態(tài)之間存在強(qiáng)耦合關(guān)系,此外地面試驗(yàn)獲得的導(dǎo)彈氣動(dòng)特性和發(fā)動(dòng)機(jī)推力特性也存在較大的不確定性,這使得沖壓發(fā)動(dòng)機(jī)導(dǎo)彈具有快時(shí)變、強(qiáng)非線性、強(qiáng)耦合、強(qiáng)不確定性、多約束等特點(diǎn)[1-4]。與超燃沖壓動(dòng)力高超聲速飛行器不同,采用沖壓動(dòng)力的戰(zhàn)術(shù)導(dǎo)彈在攻擊目標(biāo)時(shí)往往需要做大攻角機(jī)動(dòng)飛行,這無疑使得其快時(shí)變、強(qiáng)非線性、強(qiáng)耦合、不確定性問題變得更為突出,為此設(shè)計(jì)能夠有效抑制這種非線性、強(qiáng)耦合、不確定性影響的強(qiáng)魯棒姿態(tài)控制系統(tǒng)就顯得尤為必要。
自抗擾控制將控制系統(tǒng)設(shè)計(jì)時(shí)面臨的未建模動(dòng)態(tài)、內(nèi)外部擾動(dòng)等不確定性統(tǒng)一視為“總擾動(dòng)”,并將其擴(kuò)張為新的系統(tǒng)變量,采用擴(kuò)張狀態(tài)觀測(cè)器對(duì)系統(tǒng)狀態(tài)及總擾動(dòng)進(jìn)行估計(jì),然后將總擾動(dòng)估計(jì)引入控制器中對(duì)系統(tǒng)總擾動(dòng)進(jìn)行實(shí)時(shí)補(bǔ)償,因而可以顯著改善系統(tǒng)的魯棒性能。與動(dòng)態(tài)逆控制、滑模控制、自適應(yīng)控制等[5-9]在高超聲速飛行器姿態(tài)控制中得到了廣泛應(yīng)用并取得了良好效果的非線性方法不同,ADRC對(duì)被控對(duì)象模型精度要求較低,可以處理非線性、時(shí)變、強(qiáng)耦合等復(fù)雜不確定性系統(tǒng),可以保證閉環(huán)系統(tǒng)良好的動(dòng)態(tài)性能,同時(shí)具有結(jié)構(gòu)簡單、易于實(shí)現(xiàn)、不存在控制抖振等優(yōu)點(diǎn),因此在理論和工程實(shí)踐中得到不斷的發(fā)展和應(yīng)用[10-16]。程明智等[12]針對(duì)高超聲速飛行器模型參數(shù)不確定性問題,設(shè)計(jì)了滑模自抗擾控制器,獲得良好的控制性能,但參數(shù)攝動(dòng)對(duì)控制抖振有明顯影響。方雪等[13]針對(duì)高超聲速飛行器巡航飛行中存在的模型參數(shù)不確定和外界干擾的問題,采用線性擴(kuò)張狀態(tài)觀測(cè)器對(duì)模型不確定項(xiàng)和外界干擾的精確估計(jì)和補(bǔ)償,能夠顯著提升滑模控制器的擾動(dòng)抑制能力和系統(tǒng)的魯棒性。陳辰等[14]針對(duì)存在擾動(dòng)、執(zhí)行機(jī)構(gòu)死區(qū)非線性以及系統(tǒng)不確定性的高超聲速飛行器巡航飛行縱向控制問題,設(shè)計(jì)了非線性擾動(dòng)觀測(cè)器對(duì)系統(tǒng)復(fù)合擾動(dòng)進(jìn)行估計(jì)和補(bǔ)償,有效降低了滑模控制器控制增益和抖振,并消除了執(zhí)行機(jī)構(gòu)死區(qū)特性對(duì)動(dòng)態(tài)系統(tǒng)的影響。Sun等[15]針對(duì)飛行器俯仰通道大空域飛行控制問題,設(shè)計(jì)了基于增益調(diào)度的LADRC控制器,實(shí)現(xiàn)了對(duì)飛行器的高動(dòng)態(tài)姿態(tài)控制。霍斯琦等[16]針對(duì)再入飛行器縱向控制問題,采用ESO對(duì)阻力加速度進(jìn)行估計(jì)和補(bǔ)償,所設(shè)計(jì)的控制器在環(huán)境不確定性和導(dǎo)航偏差干擾下仍具有良好的性能。
本文主要研究縱向平面內(nèi)的大過載機(jī)動(dòng)控制和馬赫數(shù)控制問題。首先,對(duì)導(dǎo)彈縱向動(dòng)力學(xué)模型精確線性化得到導(dǎo)彈過載和馬赫數(shù)控制數(shù)學(xué)模型,然后分別設(shè)計(jì)了過載回路和速度回路的自抗擾控制器,并采用ESO對(duì)系統(tǒng)的總的不確定性進(jìn)行實(shí)時(shí)估計(jì)和補(bǔ)償,最后通過仿真對(duì)所設(shè)計(jì)的控制器的有效性進(jìn)行驗(yàn)證。
2 沖壓發(fā)動(dòng)機(jī)導(dǎo)彈數(shù)學(xué)模型
2.1 縱向運(yùn)動(dòng)動(dòng)力學(xué)方程
下面給出導(dǎo)彈縱向平面運(yùn)動(dòng)數(shù)學(xué)模型:
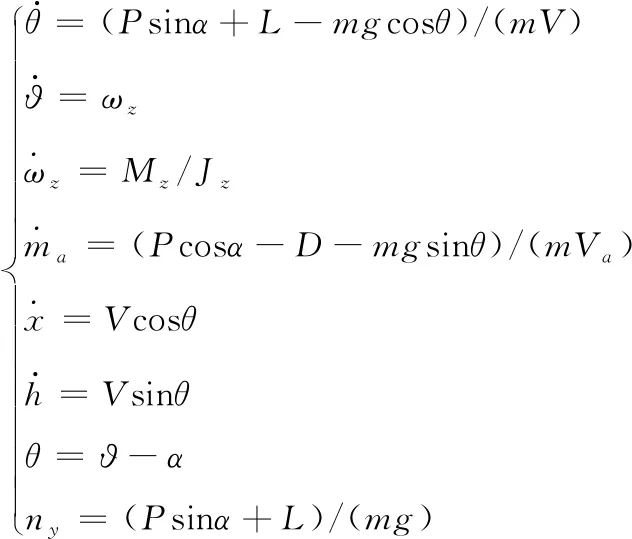
(1)
式中:m、V、α、θ、?、ma、h、ωz、g、Va分別為導(dǎo)彈質(zhì)量、速度、攻角、彈道傾角、俯仰角、馬赫數(shù)、飛行高度、俯仰角速度、重力加速度和音速,P、L、D、Mz、Jz分別為發(fā)動(dòng)機(jī)推力、升力、阻力、俯仰力矩以及導(dǎo)彈沿著z軸的轉(zhuǎn)動(dòng)慣量,氣動(dòng)力和氣動(dòng)力矩的具體表達(dá)式為:

(2)

本文采用沖壓發(fā)動(dòng)機(jī)為導(dǎo)彈全程主動(dòng)機(jī)動(dòng)飛行提供推力。沖壓發(fā)動(dòng)機(jī)推力是飛行高度、馬赫數(shù)、攻角、燃油流量等變量的函數(shù),具體可描述為[17-18]:
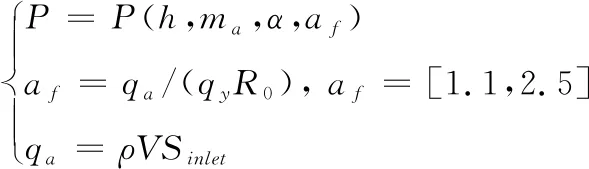
(3)
式中af、qa、qy、ρ、Sinlet分別為余氣系數(shù)、空氣流量、發(fā)動(dòng)機(jī)燃油、大氣密度和進(jìn)氣道捕獲面積,R0為常數(shù)。
發(fā)動(dòng)機(jī)推力可通過改變?nèi)加土髁縼韺?shí)現(xiàn),燃油流量調(diào)節(jié)系統(tǒng)可描述為一個(gè)二階系統(tǒng):

(4)
式中:ξ和ωn分別為二階系統(tǒng)的阻尼和頻率,分別取ξ=0.4,ωn=100,qyd為發(fā)動(dòng)機(jī)供油流量調(diào)節(jié)器指令信號(hào)。
2.2 控制模型
式(1)~式(4)給出了沖壓發(fā)動(dòng)機(jī)導(dǎo)彈縱向運(yùn)動(dòng)數(shù)學(xué)模型,下面給出控制系統(tǒng)數(shù)學(xué)模型。定義X=[nyma]T,U=[δzqy]T,Y=[nyma]T。控制系統(tǒng)設(shè)計(jì)目標(biāo)為希望準(zhǔn)確光滑的跟蹤期望輸出Yd=[nydmad]T。
為了開展控制器設(shè)計(jì),需要對(duì)導(dǎo)彈縱向平面內(nèi)動(dòng)力學(xué)方程進(jìn)行轉(zhuǎn)換,由式(1)~式(3)可得:
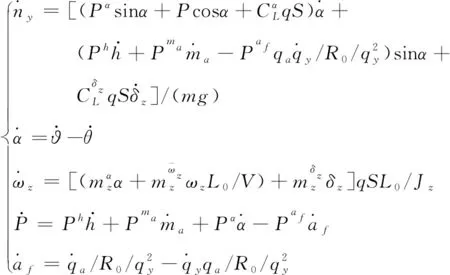
(5)
將上式記為:

(6)
式中:
(7)
由于式(6)中過載ny與舵偏量δz不直接相關(guān),因此對(duì)其進(jìn)一步求導(dǎo),得到:
(8)
式中:
(9)
為了得到馬赫數(shù)和燃油供油量的直接關(guān)系,對(duì)式(1)中第四式進(jìn)行兩次微分,并結(jié)合式(1)、式(4)、式(5)中第三式可得:
(10)
式中
(11)
由式(8)和式(10)可得導(dǎo)彈過載和馬赫數(shù)控制模型為:
(12)
3 自抗擾控制器設(shè)計(jì)
3.1 過載回路跟蹤控制器

(13)

對(duì)式(13)可設(shè)計(jì)如下擴(kuò)張狀態(tài)觀測(cè)器:
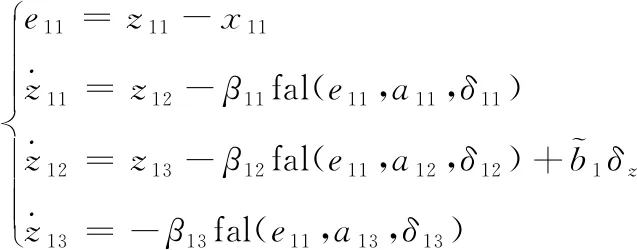
(14)
式中:z1i是x1i的估計(jì),β1i是觀測(cè)器增益,a1i、δ1i是非線性函數(shù)fal(e,a,δ)[8]的參數(shù)(i=1,2,3)。選擇適當(dāng)?shù)膮?shù)β1i、a1i、δ1i可使得式(14)能夠準(zhǔn)確的估計(jì)式(13)的各狀態(tài)量。
針對(duì)式(13),取控制量δz為:

(15)
式中u10為虛控制量,將上式代入式(13)可得到如下積分串聯(lián)型系統(tǒng):
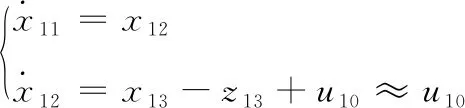
(16)
對(duì)上式可設(shè)計(jì)如下非線性狀態(tài)誤差反饋控制律:
u10=k11fal(e11,a14,δ14)+k12fal(e12,a15,δ15)
e11=υ11-z11
e12=υ12-z12
(17)
式中υ11、υ12為過載指令nyd及其微分,由于沖壓發(fā)動(dòng)機(jī)導(dǎo)彈過載與發(fā)動(dòng)機(jī)推力存在強(qiáng)耦合關(guān)系,合理安排過載指令nyd的過渡過程有利于獲得更好的控制性能。υ11、υ12的具體計(jì)算過程見文獻(xiàn)[8],k11、k12為可調(diào)參數(shù),a1i、δ1i(i=4,5)定義與式(14)相同。
過載通道ADRC控制回路結(jié)構(gòu)如圖1所示。
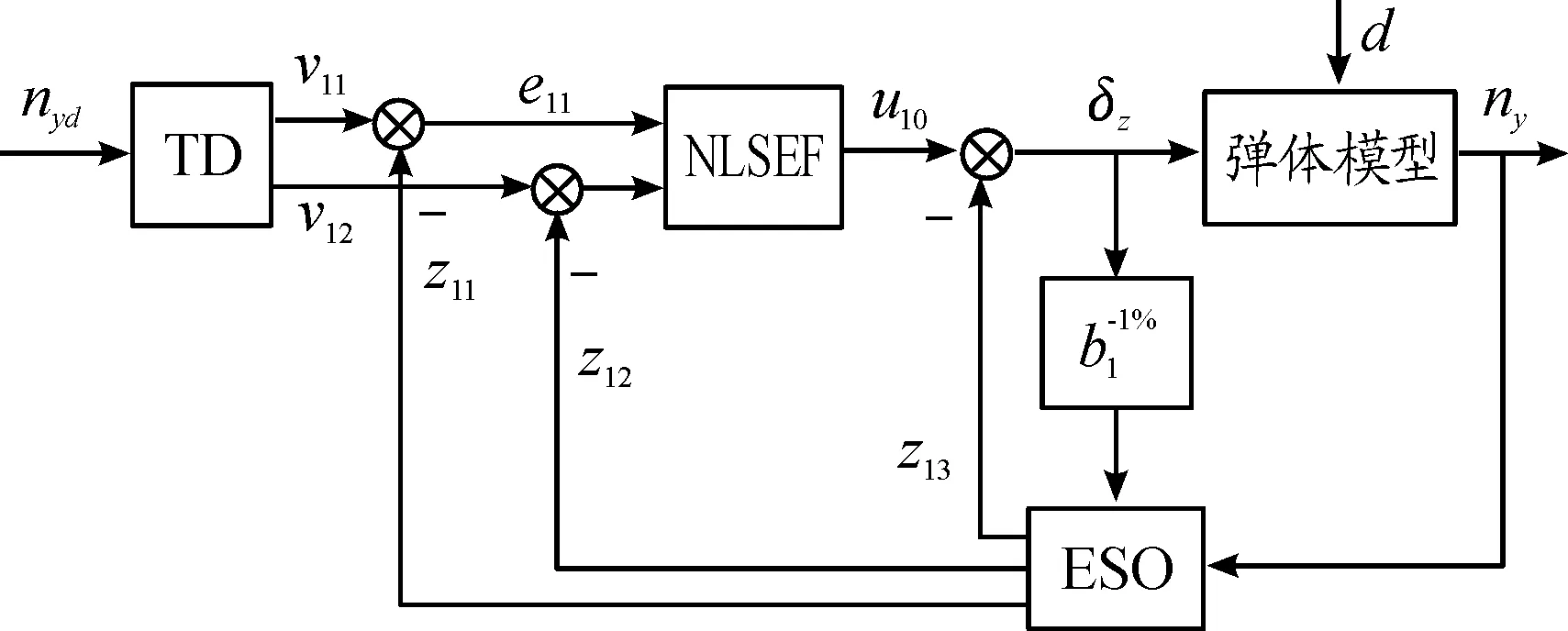
圖1 過載通道ADRC控制回路結(jié)構(gòu)示意圖Fig.1 ADRC control diagram of overload loop
3.2 馬赫數(shù)回路跟蹤控制器

(18)

同樣的對(duì)式(18)設(shè)計(jì)如下擴(kuò)張狀態(tài)觀測(cè)器:
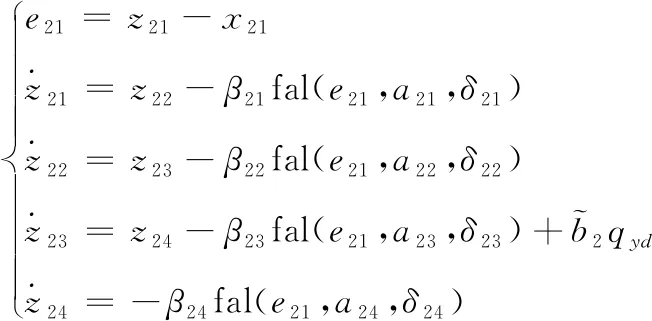
(19)
其中z2i是x2i的估計(jì),β2i是觀測(cè)器增益,a2i、δ2i是非線性函數(shù)fal(e,a,δ)的參數(shù)(i=1,2,3,4)。
針對(duì)式(18),取控制量qyd為:

(20)
從而(18)可化為不包含任何未知參數(shù)的三階積分串聯(lián)型系統(tǒng):
(21)
其中u20為待設(shè)計(jì)的虛控制量。根據(jù)自抗擾控制理論,可以設(shè)計(jì)如下非線性狀態(tài)誤差反饋控制律:
u20=k21fal(e21,a25,δ25)+k22fal(e22,a26,δ26)
e21=υ21-z21
e22=υ22-z22
(22)
式中υ21、υ22為馬赫數(shù)指令mad及其微分。k21、k22、a2i、δ2i(i=5,6)的定義與式(17)相同。
馬赫數(shù)通道ADRC控制回路結(jié)構(gòu)如圖2所示。
圖2 馬赫數(shù)通道ADRC控制回路結(jié)構(gòu)示意圖Fig.2 ADRC control diagram of Mach loop
4 仿真分析
假定導(dǎo)彈飛行初始參數(shù)為:導(dǎo)彈質(zhì)量m=900 kg,速度V=885 m/s,高度h=10 km,彈道傾角θ=0°,俯仰角和攻角 ?=α=1.3°,舵偏角δz=0,qy=1.1 kg。
控制器參數(shù)設(shè)置如下:
(23)
為了考察控制器性能,分別對(duì)馬赫數(shù)通道和過載通道進(jìn)行仿真試驗(yàn)。仿真1主要考察馬赫數(shù)通道指令響應(yīng)情況,控制指令設(shè)置如下:
(24)
仿真1結(jié)果如圖3~圖5所示。

圖3 馬赫數(shù)指令及跟蹤曲線
圖5 供油量、余氣系數(shù)響應(yīng)曲線Fig.5 Response of fuel flow and fuel-air ratio
從圖3可以看出導(dǎo)彈馬赫數(shù)能夠很好的跟蹤指令,沒有超調(diào)量,穩(wěn)態(tài)誤差約為1%。馬赫數(shù)由3.0上升到3.2的時(shí)間為11.6 s,這主要是沖壓發(fā)動(dòng)機(jī)推力裕量較小,在導(dǎo)彈加速過程中af一直處于最小值1.1,即發(fā)動(dòng)機(jī)處于最大允許供油狀態(tài),這從圖5可以看出。此外,從圖4可以看出,在導(dǎo)彈加速和減速過程中,導(dǎo)彈過載ny和舵偏δz都僅在馬赫數(shù)變化率較大的地方發(fā)生較大變化,其他時(shí)間幅值都較小,這表明所設(shè)計(jì)的控制器較好的實(shí)現(xiàn)了馬赫數(shù)通道和過載通道的解耦。圖4中攻角發(fā)生明顯變化,這主要是導(dǎo)彈飛行速度變化后,導(dǎo)彈維持巡航飛行所需的配平攻角也發(fā)生相應(yīng)變化。從圖5可以看出,沖壓發(fā)動(dòng)機(jī)在導(dǎo)彈由Ma3.0加速至Ma3.2的過程中處于最大供油狀態(tài),在導(dǎo)彈馬赫數(shù)由3.2減速至3.0的過程中處于最小供油狀態(tài)。從圖6中可以看到,導(dǎo)彈做加減速機(jī)動(dòng)時(shí),馬赫數(shù)通道的擾動(dòng)比較大,而過載通道的擾動(dòng)比較小,這是因?yàn)闄C(jī)動(dòng)過程中導(dǎo)彈攻角變化不大,主要是發(fā)動(dòng)機(jī)燃油流量快速變化導(dǎo)致馬赫數(shù)通達(dá)擾動(dòng)較大。
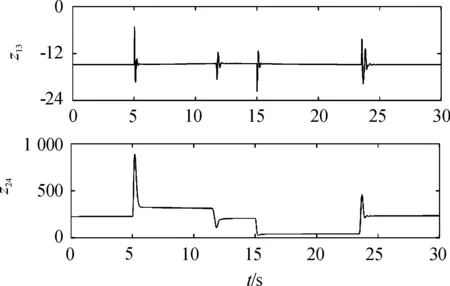
圖6 過載通道和馬赫數(shù)通道總擾動(dòng)估計(jì)曲線Fig.6 Estimation of overall disturbance of overload loop and Mach loop
仿真2主要考察過載通道指令響應(yīng)情況,控制指令設(shè)置如下:

(25)
仿真結(jié)果如圖7~圖11所示。
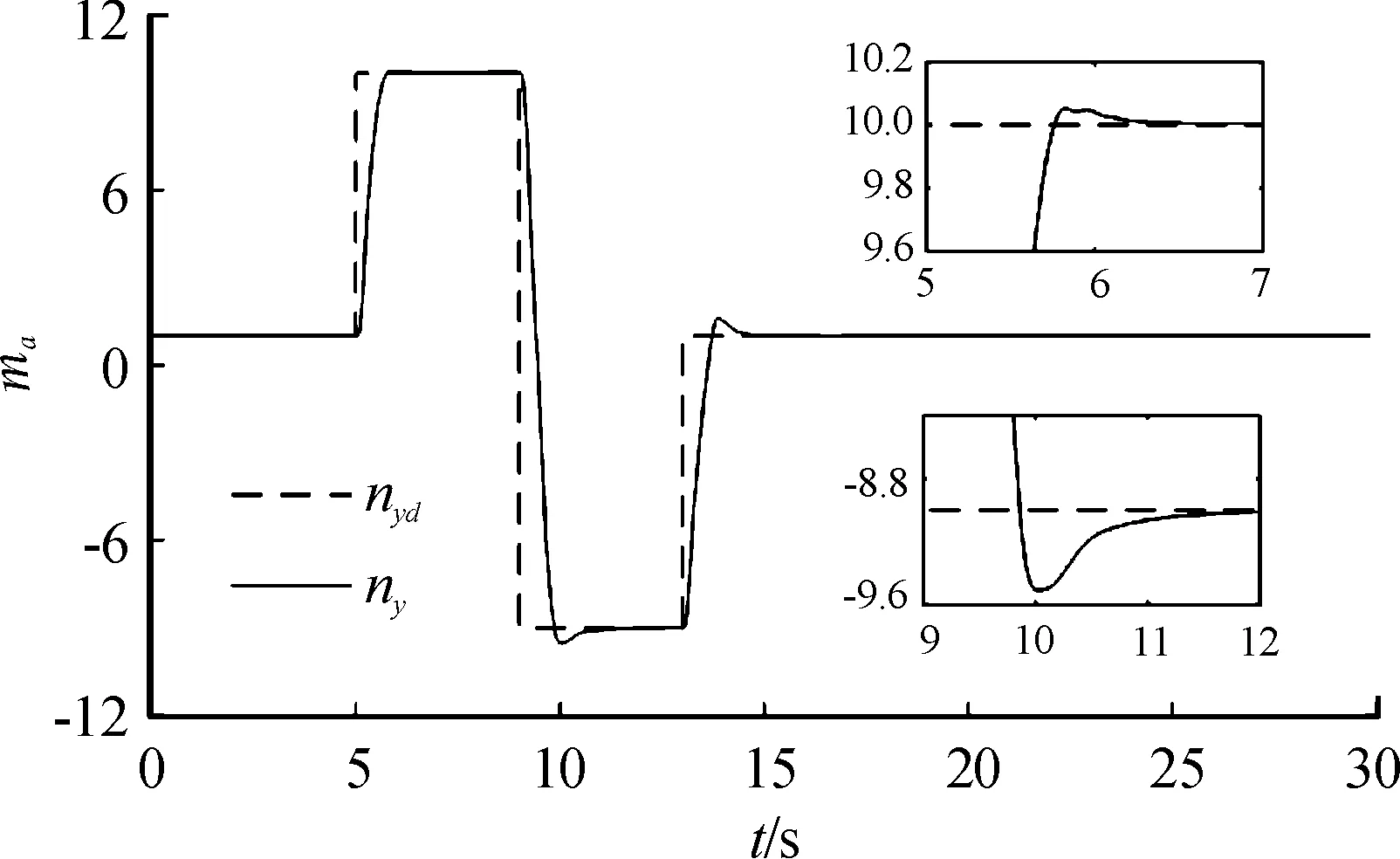
圖7 過載指令及響應(yīng)曲線
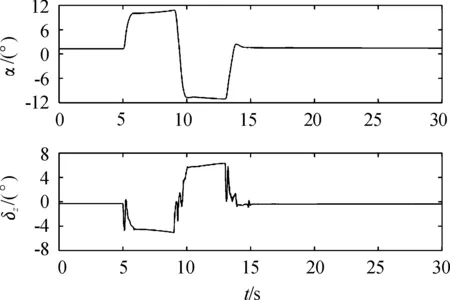
圖8 攻角與舵偏響應(yīng)曲線
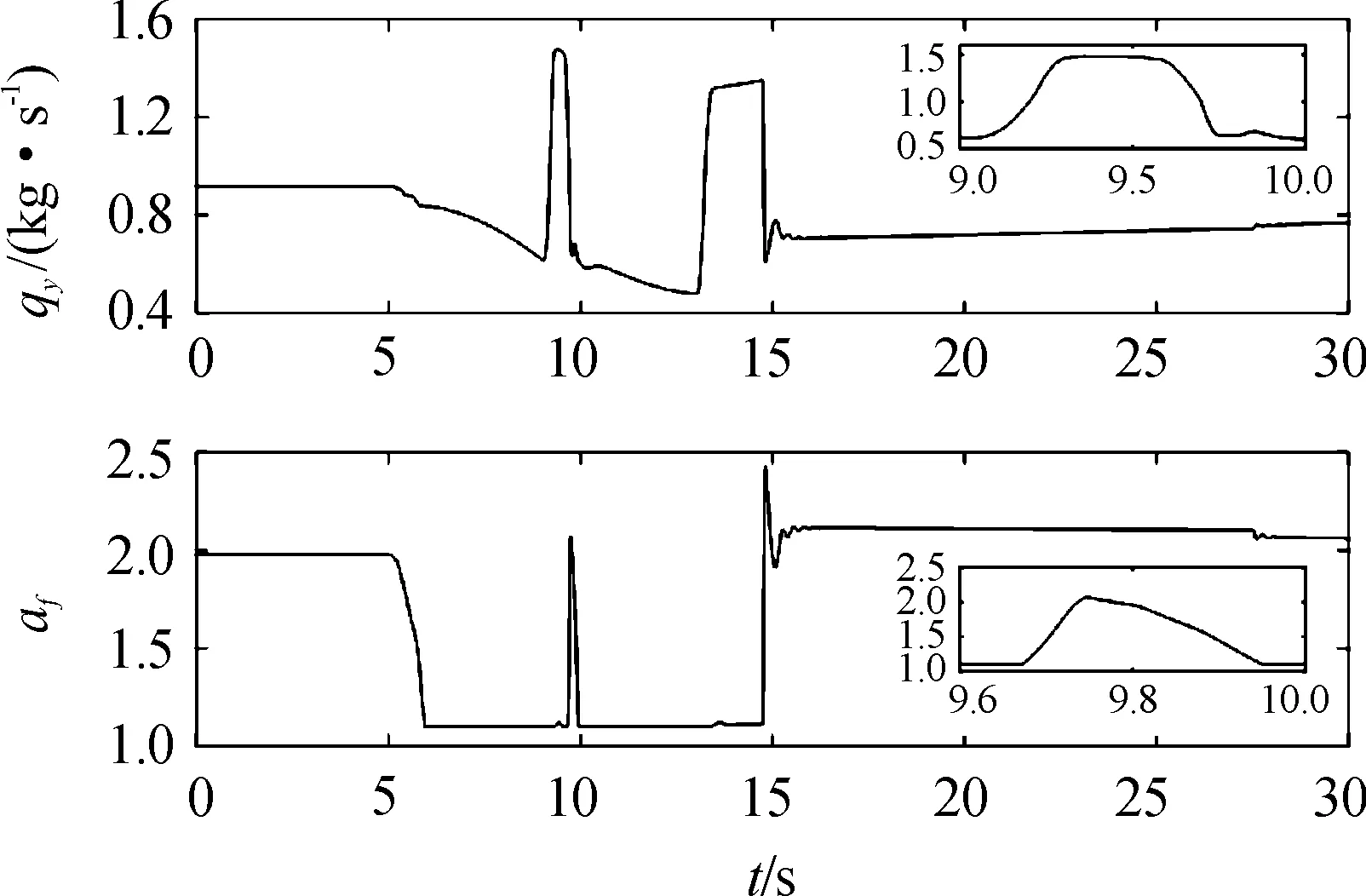
圖9 燃油流量與余氣系數(shù)響應(yīng)曲線
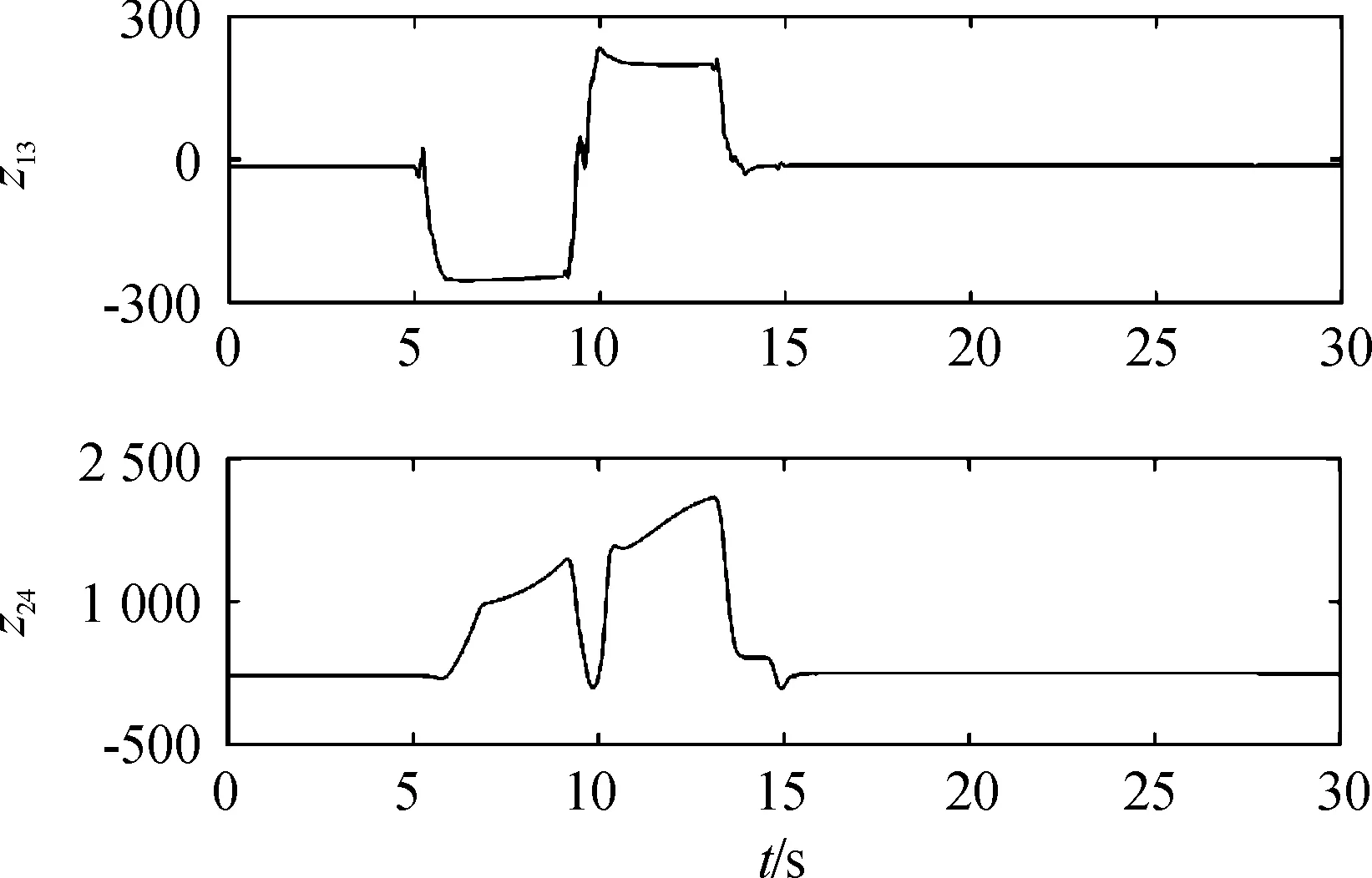
圖11 過載通道和馬赫數(shù)通道總擾動(dòng)估計(jì)曲線
從圖7可以看出,導(dǎo)彈能夠快速的跟蹤大過載指令,過載指令從1上升到10的時(shí)間為0.75 s,超調(diào)量為0.5%,穩(wěn)態(tài)誤差小于0.1%;同時(shí)從圖8可以看出,在導(dǎo)彈跟蹤過載指令過程中,舵偏沒有抖振現(xiàn)象,其中舵面在控制指令突變時(shí)變化較大,這是由于控制指令突變會(huì)導(dǎo)致擾動(dòng)估計(jì)值z(mì)13發(fā)生較大變化,而z13又被直接引入到舵偏指令中。從圖8、圖9可以看出,導(dǎo)彈平飛時(shí),余氣系數(shù)af約為2.0,當(dāng)導(dǎo)彈做大過載機(jī)動(dòng)時(shí),導(dǎo)彈的平衡攻角約為10.76°和-10.7°,此時(shí)沖壓發(fā)動(dòng)機(jī)進(jìn)氣道捕獲的進(jìn)氣量迅速減少,余氣系數(shù)一直處于1.1,即沖壓發(fā)動(dòng)機(jī)處于最大供油狀態(tài),其中余氣系數(shù)在9.6~10 s,燃油流量在9~10 s期間發(fā)生較大的變化,這是由于過載指令在9 s時(shí)刻由正10變?yōu)?9,攻角從10.76°變?yōu)?10.7°,在這一過程中,攻角的絕對(duì)值減小,沖壓發(fā)動(dòng)機(jī)進(jìn)氣道捕獲的空氣量增加,允許的供油流量增加,導(dǎo)彈飛行馬赫數(shù)逐漸跟上馬赫數(shù)跟蹤指令,因而余氣系數(shù)也逐漸增大。從圖10可以看出,在導(dǎo)彈跟蹤過載指令過程中,馬赫數(shù)有明顯的下降,這種情況并不是由于過載通道和馬赫數(shù)通道耦合造成的;而是由于導(dǎo)彈做大過載機(jī)動(dòng)時(shí),導(dǎo)彈攻角快速增大,這使得沖壓發(fā)動(dòng)機(jī)進(jìn)氣道能捕獲的進(jìn)氣量下降,根據(jù)式(3),即使余氣系數(shù)af一直處于最小值1.1,發(fā)動(dòng)機(jī)允許的供油量也會(huì)減小,相應(yīng)的發(fā)動(dòng)機(jī)推力也較小,從而導(dǎo)致導(dǎo)彈速度下降,從圖9也可以看出馬赫數(shù)偏差較大時(shí),發(fā)動(dòng)機(jī)處于最小余氣系數(shù)工作狀態(tài)。從圖11可以看出,導(dǎo)彈做大過載機(jī)動(dòng)時(shí),過載通道和馬赫數(shù)通道擾動(dòng)量都比較大,這主要是氣動(dòng)參數(shù)和發(fā)動(dòng)機(jī)性能參數(shù)都對(duì)攻角敏感,攻角的快速變化會(huì)使得這兩個(gè)通道的擾動(dòng)顯著增加。
5 結(jié)論
1) 控制器能夠快速準(zhǔn)確跟蹤過載和馬赫數(shù)控制指令,且通道之間耦合較小,舵面和供油量不存在抖振現(xiàn)象。
2) ESO觀測(cè)器能夠?qū)ο到y(tǒng)中的擾動(dòng)進(jìn)行有效估計(jì),將估計(jì)值動(dòng)態(tài)補(bǔ)充到控制器中可顯著提高控制器抗擾動(dòng)能力和系統(tǒng)魯棒性能。
3) 仿真發(fā)現(xiàn)沖壓發(fā)動(dòng)機(jī)導(dǎo)彈在長時(shí)間大過載機(jī)動(dòng)時(shí),導(dǎo)彈速度下降,嚴(yán)重時(shí)有可能導(dǎo)致超出發(fā)動(dòng)機(jī)正常工作狀態(tài),后續(xù)將進(jìn)一步研究考慮沖壓發(fā)動(dòng)機(jī)穩(wěn)定工作邊界的大過載機(jī)動(dòng)控制問題。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:30
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:18
測(cè)控技術(shù)(2018年5期)2018-12-09 09:04:26
電子測(cè)試(2018年18期)2018-11-14 02:30:34
電信科學(xué)(2016年10期)2016-11-23 05:11:56
汽車與新動(dòng)力(2015年1期)2015-02-27 12:11:01
西安航空學(xué)院學(xué)報(bào)(2014年5期)2014-07-13 01:27:52
機(jī)電信息(2014年27期)2014-02-27 15:53:56
汽車與新動(dòng)力(2014年2期)2014-02-27 12:10:15