基于LSTM的Encoder-Decoder多步軌跡預測技術
2021-08-05 09:20:25李青勇何兵張顯煬朱曉宇劉剛
航空兵器 2021年2期
李青勇 何兵 張顯煬 朱曉宇 劉剛


摘要:針對弱約束非合作目標的軌跡特性和運動特性,提出一種基于LSTM的Encoder-Decoder多步軌跡預測技術(EDMTP)。引入一階差分處理,降低了軌跡數據的時間依賴性,得到了無趨勢的軌跡。構造輸入輸出的軌跡數據對,將預測問題轉化為有監督學習問題,研究多步預測過程中模型性能的變化,實現端到端的軌跡預測。仿真結果表明,該方法能夠從歷史軌跡數據中提取更多的軌跡特征,在多步軌跡預測中具有明顯的優勢。與KFTP和HMMTP算法相比,EDMTP的誤差增長率分別同比下降了2.18%和3.52%,取得了較好的軌跡預測效果。
關鍵詞: 軌跡預測;LSTM;編碼器-解碼器;監督學習;多步預測
中圖分類號:TJ761;TP181? 文獻標識碼: A? 文章編號: 1673-5048(2021)02-0049-06
0 引? 言
近年來,著眼于全球范圍快速精確打擊、遠程武裝力量投送等作戰意圖,通過對弱約束非合作目標的軌跡數據進行分析建模,挖掘其中蘊藏的運動規律和特征趨勢,研究相應的預測模型及算法,進一步完成軌跡預測,滿足精確打擊和打贏未來局部戰爭的軍事需求,為打贏未來局部戰爭方案設計與關鍵技術攻關提供技術支持,為作戰籌劃和態勢感知提供理論支撐。弱約束非合作目標通常是指無固定路徑約束或路徑約束很弱的非合作方移動目標。如臨海巡航的航母戰斗群、失效或故障的航天器、高機動的坦克裝甲車等,其具有運動方向隨機性強、移動自由度大、運動規律多樣、軌跡特征不明顯等特點,且軌跡數據一般為自身所有,共享程度較低,獲取手段單一,通常依靠天基平臺上的各類電子偵察衛星、雷達和地面基站等設備多維聯合定位跟蹤觀測。對該類目標的軌跡數據進行分析及預測成為各軍事大國當前亟需研究解決的難題。
軌跡預測是指對歷史軌跡進行全面剖析和映射,挖掘各個位置之間隱藏的時空信息和語義特征,然后基于一定的預測模型,推斷出下一時刻或多個時刻的位置信息[1]。傳統的軌跡預測主要有基于運動模型的軌跡預測和基于統計分析和概率計算的軌跡預測。基于運動模型的常用思路是卡爾曼濾波(Kalman Filter,KF)[2]。如喬少杰等[3]提出了一種基于KF的動態軌跡預測算法,采用系統的狀態空間模型以及觀測模型,對移動對象進行連續的位置預測。Cheng等[4]提出了一種基于KF和支持向量機(SVM)算法,在中快速乒乓球的軌跡預測上取得很好效果。但該算法結構過于簡單,無法分析復雜的軌跡模式,且對于長期預測表現不佳。為克服該缺陷,引入基于統計分析和概率計算的預測模型,主要包括高斯過程模型和隱馬爾科夫模型(Hidden Markov Model,HMM)[5]。如高建等[6]提出基于概率分布模型的高斯混合-時間序列模型,實現車輛軌跡預測。趙曉光[7]提出一種應用哈希表實現多階馬爾科夫預測模型,解決了狀態空間膨脹的問題。Kurashima等[8]在位置信息中結合用戶的偏好信息,提出了基于概率行為的馬爾科夫旅游線路預測模型。盡管這種模型對預測軌跡的物理過程進行顯示建模,但其求解計算復雜度較高,在實際場景中算法性能受到限制。
隨著深度學習的不斷發展,一些深度學習模型應用于時間序列方面的研究。與傳統的預測模型相比,深度學習模型擁有強大的數據挖掘和特征提取能力。長短期記憶(Long Short-Term Memory,LSTM)作為一種強大的遞歸神經網絡(Recursive Neural Network,RNN)可以維持內部的輸入記憶,并且彌補了RNN在訓練過程中存在的梯度消失和梯度爆炸問題,廣泛應用于軌跡預測問題[9]。如季學武等[10]提出了基于LSTM網絡的意圖識別和軌跡預測模型,有效提高了軌跡預測的準確性。Zaroug等[11]將LSTM網絡應用于下肢運動學的多個時間步軌跡,取得了不錯的效果。
基于此,結合弱約束非合作目標的運動特點及軌跡特征,提出了基于LSTM的Encoder-Decoder多步軌跡預測技術(Multi-Step Trajectory Prediction Based Encoder-Decode,EDMTP),從而實現了端到端的軌跡預測。
1 問題描述
軌跡預測問題認為是通過分析移動目標的歷史軌跡,挖掘隱藏的運動規律和運動模式并預測未來的軌跡信息[12]。形式上,可認為存在一組可觀測輸入特征I和一組可觀測的輸出特征O,假設I和O之間是可以預測的。設Tprev={t=t1,t2,…,tobs},對于x∈I且t∈Tprev,用xk表示在t=tk時刻觀測到的特征值。同樣,定義Tpost={t1,t2,…,tobs},并用yl表示對于y∈O且t∈Tpost在t=tl時刻的輸出值。令X=(xk)x∈I,t∈Tprev和Y=(yl)y∈O,t∈Tpost分別表示觀察到的特征的張量和對應的預測輸出,通過訓練非線性映射關系F,使預測輸出y^=F(X)盡可能與實際值Y接近,如圖1所示。
設待預測的軌跡之間存在某種上下文的語義相關性,Tr表示由n條軌跡組成的數據集:
Tr={Tr1,Tr2,…,Trn}(1)
Tri=(xti,yti)? (t=t1,t2,…,tobs)(2)
式中:Tri為軌跡數據集中的第i條軌跡; (xti,yti)為第i條軌跡在t時刻軌跡數據點。設當輸入特征為Tr時,輸出T^r為
T^r={T^r1,T^r2,…,T^rn}(3)
T^ri=(x^ti,y^ti)? (t=t1,t2,…,tobs)(4)
式中:T^ri為預測的第i條軌跡;(x^ti,y^ti)為預測的第i條軌跡在t時刻的軌跡數據點。因此,軌跡預測問題可描述為
T^ri=Fλ[(x1i,y1i),(x2i,y2i),…,(xtobsi,ytobsi)](5)
式中:F,λ分別為Tri和T^r之間的非線性映射關系和模型參數。通過優化參數λ使得輸出T^ri逼近特征Tri,從而得到模型的最優參數估計值:
λ^=argminλD(Tri,T^ri)(6)
式中:D(Tri,T^ri)為某種度量方式[13],一般采用歐氏距離。由此便完成了模型的訓練和參數估計過程,即可基于該映射關系進行軌跡預測。
2 基于LSTM的Encoder-Decoder多步預測技術
2.1 軌跡數據處理
軌跡是一組連續性的數據信息,具有時間延續性和空間隨機性。對原始軌跡數據進行相應處理不僅可以加速模型的收斂,提高模型的預測精度,還降低訓練成本和復雜性。
2.1.1 特征縮放
由于軌跡具有空間隨機性,導致軌跡間的差別很大,原始軌跡特征量綱不一致可能會影響到模型預測的結果[14]。為消除軌跡特征之間的量綱影響,提高計算的穩定性,需要對原始軌跡進行特征縮放,使不同特征的度量指標之間具有可比性:
xnew=2x-(xmax+xmin)xmax-xmin (7)
ynew=2y-(ymax+ymin)ymax-ymin(8)
式中:xmax,xmin,ymax,ymin為軌跡數據的最大值和最小值。
2.1.2 數據差分
軌跡具有時間連續性,存在某種隨時間增加或減少的趨勢,對預測算法的精度有一定的影響。為獲得穩定的訓練結果,在應用預測算法前,應移除軌跡之間的趨勢,考慮軌跡之間的變化情況,使軌跡趨于平坦。差分是移除趨勢的一種標準方法[15],通過用t時刻的觀察值(xt,yt)減去t′時刻的觀察值(xt′,yt′),得到軌跡數據變化率,來移除軌跡數據的時間依賴性,得到無趨勢軌跡:
xdiff=xt-xt′(9)
ydiff=yt-yt′(10)
在預測結束后,需要執行反差分操作,通過將t′時刻的觀察值添加到預測值(x^diff,y^diff)中,將預測值迅速恢復到原始數據比例:
xinverted=x^diff+xt′(11)
yinverted=y^diff+yt′(12)
將1×(n+1)維的軌跡經過差分處理,得到1×n維的無趨勢軌跡:
[pdiff1,…,pdiffn]=[p2-p1,…,pn+1-pn](13)
式中:pi=(xi,yi)為特征縮放后的軌跡數據;pdiffi=(xdiffi,ydiffi)為差分后的軌跡數據。
2.1.3 構造監督型數據
模型訓練的目的是為了找出輸入I和輸出O之間的映射關系,通過將無趨勢軌跡構造為輸入輸出的軌跡數據對,學習輸入和輸出之間的依賴關系,將預測問題轉化為監督型學習問題[16]。如式(14)所示,將1×n的無趨勢軌跡,重構為n×(t+1)的輸入輸出矩陣,t為構造的監督數據輸入步長,矩陣左邊的n×t數據作為輸入特征,右邊n×1作為輸出特征。
0…00pdiff10…0pdiff1pdiff20…pdiff1pdiff2pdiff3…pdiffn-t+1…pdiffn-3pdiffn-2pdiffn-1pdiffn-t…pdiffn-2pdiffn-1pdiffn(14)
2.2 LSTM神經網絡
LSTM網絡是RNN的變體,與傳統的RNN相比,具有獨特的存儲和遺忘功能,通過學習軌跡序列規律,提取隱藏的軌跡序列特征,既可以準確地獲得軌跡序列之間的依賴關系,又克服了RNN在訓練過程中出現的梯度消失、梯度爆炸和長期記憶消失問題[9]。因此,LSTM網絡可以很好地處理軌跡序列問題。LSTM網絡隱藏層中線性自循環的存儲單元,可以長期保留梯度,并且通過三個門控制流入和流出的信息。
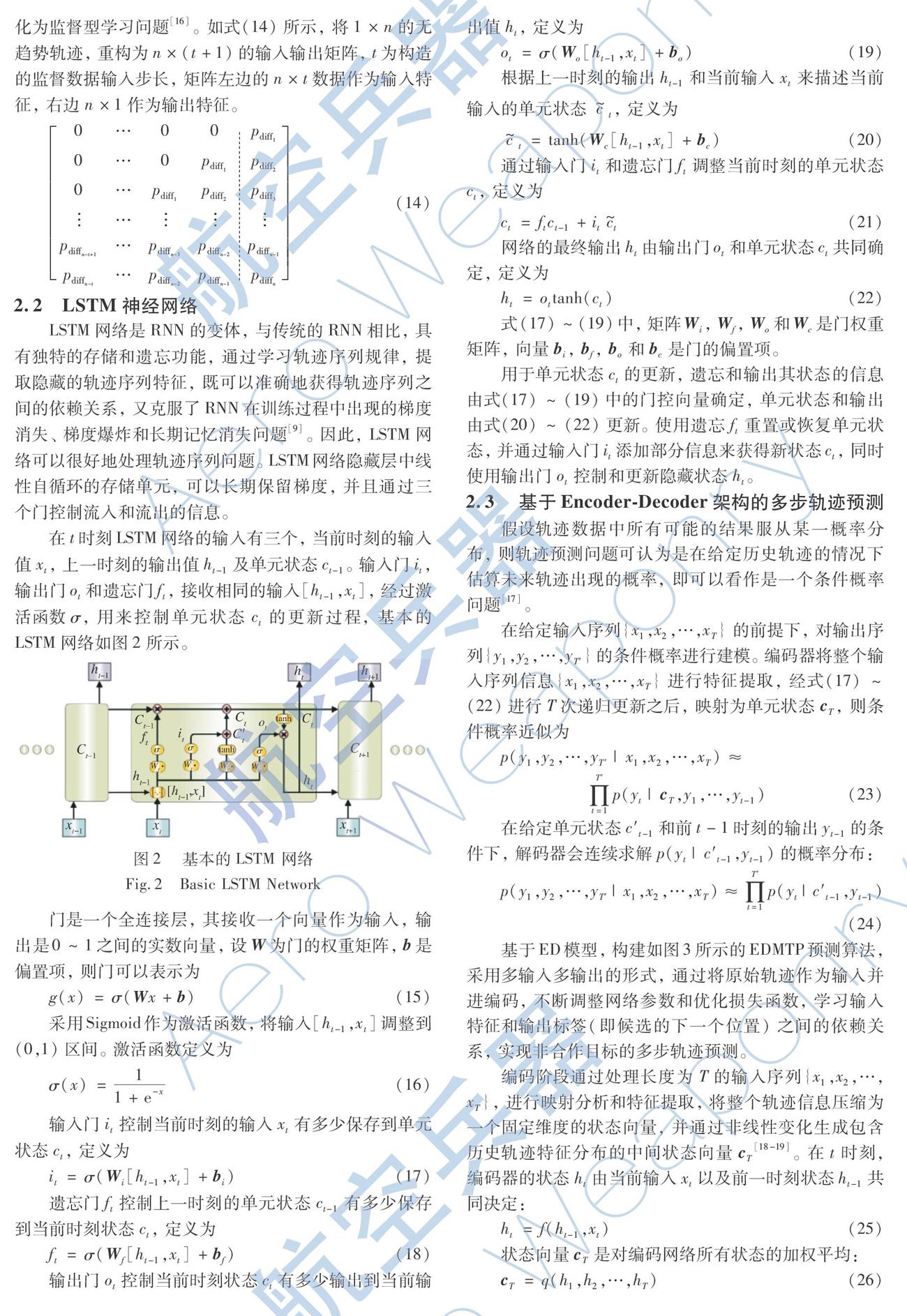
在t時刻LSTM網絡的輸入有三個,當前時刻的輸入值xt,上一時刻的輸出值ht-1及單元狀態ct-1。輸入門it,輸出門ot和遺忘門ft,接收相同的輸入[ht-1,xt],經過激活函數σ,用來控制單元狀態ct的更新過程,基本的LSTM網絡如圖2所示。
門是一個全連接層,其接收一個向量作為輸入,輸出是0~1之間的實數向量,設W為門的權重矩陣,b是偏置項,則門可以表示為
g(x)=σ(Wx+b)(15)
采用Sigmoid作為激活函數,將輸入[ht-1,xt]調整到(0,1)區間。激活函數定義為
σ(x)=11+e-x(16)
輸入門it控制當前時刻的輸入xt有多少保存到單元狀態ct,定義為
it=σ(Wi[ht-1,xt]+bi)(17)
遺忘門ft控制上一時刻的單元狀態ct-1有多少保存到當前時刻狀態ct,定義為
ft=σ(Wf[ht-1,xt]+bf)(18)
輸出門ot控制當前時刻狀態ct有多少輸出到當前輸出值ht,定義為
ot=σ(Wo[ht-1,xt]+bo)(19)
根據上一時刻的輸出ht-1和當前輸入xt來描述當前輸入的單元狀態c~t,定義為
c~t=tanh(Wc[ht-1,xt]+bc)(20)
通過輸入門it和遺忘門ft調整當前時刻的單元狀態ct,定義為
ct=ftct-1+itc~t(21)
網絡的最終輸出ht由輸出門ot和單元狀態ct共同確定,定義為
ht=ottanh(ct)(22)
式(17)~(19)中,矩陣Wi,Wf,Wo和Wc是門權重矩陣,向量bi,bf,bo和bc是門的偏置項。
用于單元狀態ct的更新,遺忘和輸出其狀態的信息由式(17)~(19)中的門控向量確定,單元狀態和輸出由式(20)~(22)更新。使用遺忘ft重置或恢復單元狀態,并通過輸入門it添加部分信息來獲得新狀態ct,同時使用輸出門ot控制和更新隱藏狀態ht。
2.3 基于Encoder-Decoder架構的多步軌跡預測
假設軌跡數據中所有可能的結果服從某一概率分布,則軌跡預測問題可認為是在給定歷史軌跡的情況下估算未來軌跡出現的概率,即可以看作是一個條件概率問題[17]。
在給定輸入序列{x1,x2,…,xT}的前提下,對輸出序列{y1,y2,…,yT′}的條件概率進行建模。編碼器將整個輸入序列信息{x1,x2,…,xT}進行特征提取,經式(17)~(22)進行T次遞歸更新之后,映射為單元狀態cT,則條件概率近似為
p(y1,y2,…,yT′|x1,x2,…,xT)≈
∏T′t=1p(yt|cT,y1,…,yt-1)(23)
在給定單元狀態c′t-1和前t-1時刻的輸出yt-1的條件下,解碼器會連續求解p(yt|c′t-1,yt-1)的概率分布:
p(y1,y2,…,yT′|x1,x2,…,xT)≈∏T′t=1p(yt|c′t-1,yt-1)(24)
基于ED模型,構建如圖3所示的EDMTP預測算法,采用多輸入多輸出的形式,通過將原始軌跡作為輸入并進編碼,不斷調整網絡參數和優化損失函數,學習輸入特征和輸出標簽(即候選的下一個位置)之間的依賴關系,實現非合作目標的多步軌跡預測。
編碼階段通過處理長度為T的輸入序列{x1,x2,…,xT},進行映射分析和特征提取,將整個軌跡信息壓縮為一個固定維度的狀態向量,并通過非線性變化生成包含歷史軌跡特征分布的中間狀態向量cT[18-19]。在t時刻,編碼器的狀態ht由當前輸入xt以及前一時刻狀態ht-1共同決定:
ht=f(ht-1,xt)(25)
狀態向量cT是對編碼網絡所有狀態的加權平均:
cT=q(h1,h2,…,hT)(26)
式中:q為加權平均函數。
編碼器部分使用單層LSTM網絡,在t時刻,該網絡將原始軌跡數據Tri=(xti,yti)[t=t1,t2,…,tobs]作為輸入,映射到狀態向量cT和隱藏層狀態ht,為解碼器提供輸入。
解碼器階段從初始輸入yinit開始,接收來自編碼器中間狀態向量cT,并將其作為解碼器的初始狀態(即c′0=cT),結合當前時刻的輸入數據,模型通過求解p(yt|c′t-1,yt-1),并選擇概率最大的輸出作為模型的預測結果,然后將該預測結果遞歸的饋送到網絡中,并多次重復這一過程,使得狀態向量轉換為長度為T′的輸出序列{y1,y2,…,yT′},λ為模型參數:
y^t=argmaxλpλ(yt|c′t-1,yt-1)(27)
解碼器部分由LSTM和全連接層組成,該模型以編碼器的輸出(狀態向量cT和隱藏層狀態ht)以及LSTM網絡每個時間步的歷史軌跡數據作為輸入,通過全連接層,得到未來軌跡數據的預測結果。
在多步預測過程中,LSTM展開成前饋神經網絡,以當前時間點為基準,循環地獲取先前的軌跡序列,并作為當前時間點的輸入,通過滾動預測的原理從訓練集的歷史數據中獲取最后一次觀測值,并用其預測當前的可能取值。重復此過程,直到達到所需要的預測長度,實現多步軌跡預測,如圖4所示。
3 算法設計與仿真
本文仿真實驗采用MIT Trajectory Data[20]數據集完成,數據來源是衛星跟蹤定位的某大型平面上移動的機動車輛,該目標在運動特征、路徑約束,采集方式等均與弱約束目標類似[21],可用來檢驗所提出的算法性能。
采用線下訓練、線上預測的方式進行訓練,先利用原始軌跡數據集訓練模型,再用訓練好的模型進行預測分析。通過與基于KF的軌跡預測算法(KFTP)和基于HMM的軌跡預測算法(HMMTP)進行了比較分析,驗證了EDMTP模型多步軌跡預測的準確性。
3.1 算法流程
將軌跡經過相應處理之后,得到無趨勢的監督數據作為模型的輸入,在訓練過程中,由式(17)~(22)前向計算出每個神經元的輸出值O^,然后反向計算每個神經元的誤差項,根據誤差項計算每個權重的梯度,使用RMSE作為損失函數,Adam算法作為優化算法不斷對編碼網絡和解碼網絡進行參數更新。預測過程如下:
Step1:數據獲取。
Step2:數據處理。根據2.1節對軌跡數據進行處理,得到無趨勢的輸入輸出軌跡數據對。
Step3:模型構建。將n×(t+1)維的輸入輸出數據對的左邊n×t維作為輸入特征,右邊n×1維作為輸出特征,通過最小化預測結果與真實軌跡的誤差,不斷調整模型參數,優化網絡結構,得到最終的預測模型。
Step4:模型驗證。把測試數據輸入到訓練好的網絡中,并將預測的軌跡數據,進行反差分、反歸一化處理,得出預測結果。
Step5:性能分析。
3.2 仿真條件設置
仿真環境為CPU IntelCoreTMi9-9900K @3.60GHz,內存16 GB,GPU NVIDIA GeForce RTX 2080Ti,仿真平臺為MATLAB 2018a和PyCharm Community Edition 2019.2.4,數據處理庫為numpy1.18.4,pandas 1.0.3,并搭建TensorFlow1.12.0rc0,Keras2.2.4深度學習框架,編程語言使用Python3.6.10。
3.3 仿真結果及分析
軌跡預測是一個經典的回歸問題,本實驗使用MIT Trajectory Data數據集進行驗證,該數據集包含40 453條不同長度的軌跡數據,實驗中抽取每條軌跡的前85%的數據點作為訓練集,后15% 的數據作為測試集,訓練過程中超參數的設置如表1所示。為使實驗結果更具有說服力,仿真結果取50次運行結果的平均值。
采用均方根誤差(Root Mean Square Error,RMSE)來評估預測模型:
RMSE=1k∑ki=1(p^i-pi)2(28)
式中: k為預測步長; pi,p^i分別為真實值和預測值。
3.3.1 軌跡訓練結果
為檢驗預測算法的有效性和可行性,隨機抽取一條1×82的軌跡進行驗證。根據2.1.1和2.1.2節處理步驟,得到1×81的無趨勢軌跡。由表1可知input_step=8,根據2.1.3節數據構造方法,得到81×9的輸入輸出數據對,將前61×9作為訓練數據,后20×9作為測試數據。預測結束后,進行相應的反差分、反歸一化處理,得到步長為20的預測軌跡,即pred_step=20,對應著原始軌跡中63,64,…,82的數據點。圖 5所示為實驗結果及局部預測放大圖。
3.3.2 算法性能比較
為了進一步比較算法性能,驗證模型的準確性和可靠性,比較了EDMTP,KFTP和HMMTP模型在多個預測步長的RMSE變化情況,如表2、圖 6所示。
采用誤差增長率描述模型在多步預測過程中軌跡性能的變化情況:
η=Lossj-Lossipred_stepj-pred_stepi(29)
由圖6可知,在短期內KFTP,HMMTP和EDMTP模型的預測結果均較為接近,其中EDMTP模型的性能略優于KFTP和HMMTP模型。隨著預測步長的增加,EDMTP模型的優勢變得越來越明顯,對于pred_step=35的預測結果,相較于KFTP和HMMTP的誤差增長率同比下降了2.18%和3.52%,EDMTP模型的預測效果明顯優于KFTP和HMMTP模型。盡管這三個模型的預測誤差隨預測步長的增加而增加,但EDMTP模型預測誤差的增加趨勢明顯小于KFTP和HMMTP的預測誤差。因此,在多步軌跡預測中,EDMTP模型的性能優于其他模型。仿真結果表明,基于LSTM的EDMTP模型可從歷史軌跡數據中提取更多的軌跡特征,從而獲得更好的軌跡預測結果。
4 結 束 語
針對弱約束非合作目標,由于運動方向隨機性強、移動的自由度大、運動規律多樣、軌跡特征不明,導致軌跡數據特征復雜。本文提出了一種基于LSTM的Encoder-Decoder多步軌跡預測方法,主要的貢獻點:(1)采用了一階差分處理,移除了軌跡數據之間存在的趨勢,弱化了軌跡數據的時間依賴問題,使軌跡趨于平坦,得到了軌跡變化率,加快了算法的執行效率;
(2)將無趨勢軌跡構造為輸入輸出的軌跡數據對,通過學習輸入和輸出之間的依賴關系,將預測問題轉化為監督型學習問題,提高了模型的預測精度,降低訓練成本和復雜性;
(3)提出了基于編碼器-解碼器架構的多步預測模型,編碼器網絡通過分析歷史軌跡的運動模式,將軌跡信息壓縮為一個固定維度的狀態向量,解碼器網絡通過對狀態向量解析,并遞歸的將預測結果饋送到網絡中,實現多步軌跡預測。
參考文獻:
[1] 張顯煬,劉剛,馬霄龍,等. 基于變分自編碼的海面艦船軌跡預測算法[J]. 計算機應用研究,2020,37(S1): 122-125.
Zhang Xianyang,Liu Gang,Ma Xiaolong,et al. Variational Auto-encoding Based for Warship Trajectory Prediction[J]. Application Research of Computers,2020,37(S1): 122-125.(in Chinese)
[2] Kalman R E. A New Approach to Linear Filtering and Prediction Problems[J]. Journal of Basic Engineering,1960,82(1): 35-45.
[3] 喬少杰,韓楠,朱新文,等. 基于卡爾曼濾波的動態軌跡預測算法[J]. 電子學報,2018,46(2): 418-423.
Qiao Shaojie,Han Nan,Zhu Xinwen,et al. A Dynamic Trajectory Prediction Algorithm Based on Kalman Filter[J]. Acta Electronica Sinica,2018,46(2): 418-423.(in Chinese)
[4] Cheng Q,Wang C L. A Method of Trajectory Prediction Based on Kalman Filtering Algorithm and Support Vector Machine Algorithm[C]∥Proceedings of the 14th Chinese Intelligent Systems Conference,2018.
[5] 孫紅,陳鎖. 一種聚類隱馬爾可夫模型的時空軌跡預測算法[J]. 小型微型計算機系統,2019,40(3): 472-476.
Sun Hong,Chen Suo. Spatio-Temporal Trajectory Prediction Algorithm Based on Clustering? Hidden Markov Model[J]. Journal of Chinese Computer Systems,2019,40(3): 472-476.(in Chinese)
[6] 高建,毛鶯池,李志濤. 基于高斯混合-時間序列模型的軌跡預測[J]. 計算機應用,2019,39(8): 2261-2270.
Gao Jian,Mao Yingchi,Li Zhitao. Trajectory Prediction Based on Gauss Mixture Time Series Model[J]. Journal of Computer Applications,2019,39(8): 2261-2270.(in Chinese)
[7] 趙曉光. 基于多尺度區域劃分和運動模式的車輛軌跡預測[D]. 北京: 北京郵電大學,2017.
Zhao Xiaoguang. Trajectory Prediction Based on Multi-Scale Region Division and Vehicle Mobility Pattern[D]. Beijing: Beijing University of Posts and Telecommunications,2017. (in Chinese)
[8] Kurashima T,Iwata T,Irie G,et al. Travel Route Recommendation Using Geotagged Photos[J]. Knowledge and Information Systems,2013,37(1): 37-60.
[9] Li M X,Lu F,Zhang H C,et al. Predicting Future Locations of Moving Objects with Deep Fuzzy-LSTM Networks[J]. Transportmetrica A: Transport Science,2020,16(1): 119-136.
[10] 季學武,費聰,何祥坤,等. 基于LSTM網絡的駕駛意圖識別及車輛軌跡預測[J]. 中國公路學報,2019,32(6): 34-42.
Ji Xuewu,Fei Cong,He Xiangkun,et al. Intention Recognition and Trajectory Prediction for Vehicles Using LSTM Network[J]. China Journal of Highway and Transport,2019,32(6): 34-42.(in Chinese)
[11] Zaroug A,Lai D T H,Mudie K,et al. Lower Limb Kinematics Trajectory Prediction Using Long Short-Term Memory Neural Networks[J]. Frontiers in Bioengineering and Biotechnology,2020,8: 362.
[12] 張顯煬,朱曉宇,林浩申,等. 基于混合高斯-變分自編碼的軌跡預測算法[J/OL]. 計算機工程,2020. DOI: 10.19678/j.issn.1000-3428.0055074.
Zhang Xianyang,Zhu Xiaoyu,Lin Haoshen,et al.Gauss Mixture-variational Autoencoding Based for Trajectory Prediction[J/OL].Computer Engineering,2020. DOI: 10.19678/j.issn.1000-3428.0055074.(in Chinese)
[13] Núez J A,Cincotta P M,Wachlin F C. Information Entropy[J]. Celestial Mechanics & Dynamical Astronomy,1996.
[14] 郝曉靜,李國新,李明珠,等. 無跡卡爾曼濾波算法在目標跟蹤中的研究[J]. 電子設計工程,2012,20(13): 161-164.
Hao Xiaojing,Li Guoxin,Li Mingzhu,et al. Research of UKF in the Target Tracking[J]. Electronic Design Engineering,2012,20(13): 161-164.(in Chinese)
[15] 李明鎖,井亮,鄒杰,等. 結合擴展卡爾曼濾波的CamShift移動目標跟蹤算法[J]. 電光與控制,2011,18(4): 1-5.
Li Mingsuo,Jing Liang,Zou Jie,et al. CamShift Algorithm Combined with Extended Kalman Filter for Moving Target Tracking[J]. Electronics Optics & Control,2011,18(4): 1-5.(in Chinese)
[16] Liu C Y,Shui P L,Li S. Unscented Extended Kalman Filter for Target Tracking[J]. Journal of Systems Engineering and Electro-nics,2011,22(2): 188-192.
[17] Lü P Y,Chen N,Mao S J,et al. LSTM Based Encoder-Decoder for Short-Term Predictions of Gas Concentration Using Multi-Sensor Fusion[J]. Process Safety and Environmental Protection,2020,137: 93-105.
[18] 孫曉騫,蘇依拉,趙亞平,等. 基于編碼器-解碼器重構框架的蒙漢神經機器翻譯[J]. 計算機應用與軟件,2020,37(4): 150-155.
Sun Xiaoqian,Su Yila,Zhao Yaping,et al. Mongolian-Chinese Neural Machine Translation Based on Encoder-Decoder Reconstruction Framework[J]. Computer Applications and Software,2020,37(4): 150-155.(in Chinese)
[19] 張金超,艾山·吾買爾,買合木提·買買提,等. 基于多編碼器多解碼器的大規模維漢神經網絡機器翻譯模型[J]. 中文信息學報,2018,32(9): 20-27.
Zhang Jinchao,Aishan Wumaier,Maihemuti Maimaiti,et al. A Large-Scale Uyghur-Chinese Neural Machine Translation Model Based on Multiple Encoders and Decoders[J]. Journal of Chinese Information Processing,2018,32(9): 20-27.(in Chinese)
[20] Grimson E,Wang X,Ng G W,et al. Trajectory Analysis and Semantic Region Modeling Using a Nonparametric Bayesian Model[C]∥ IEEE Computer Society Conference on Computer Vision and Pattern Recognition,2008.
[21] Wang X G,Ma K T,Ng G W,et al. Trajectory Analysis and Semantic Region Modeling Using Nonparametric Hierarchical Baye-sian Models[J]. International Journal of Computer Vision,2011,95(3): 287-312.
Encoder-Decoder Multi-Step Trajectory
Prediction Technology Based on LSTM
Li Qingyong,He Bing*,Zhang Xianyang,Zhu Xiaoyu,Liu Gang
(Rocket Force University of Engineering,Xian 710025,China)
Abstract:
Aiming at the trajectory and motion characteristics of weakly constrained non-cooperative targets,a LSTM-based encoder-decoder multi-step trajectory prediction technology (EDMTP) is proposed. The introduction of first-order difference processing reduces the time dependence of the trajectory data,and obtains a trendless trajectory. Constructing? an input and output trajectory data pair,transforming the prediction problem into a supervised learning problem,the change of model performance in the multi-step prediction process is studied to realize end-to-end trajectory prediction. Simulation results show that this method can extract more trajectory features from historical trajectory data,and has obvious advantages in multi-step trajectory prediction. Compared with the trajectory prediction algorithms of KFTP and HMMTP,the error growth rate of EDMTP decrease by 2.18% and 3.52% year-on-year,respectively,and achieves better trajectory prediction results.
Key words: trajectory prediction;LSTM;Encoder-Decoder;supervised learning;multi-step prediction
收稿日期:2020-08-13
基金項目:國家自然科學基金青年科學基金項目(61403399)
作者簡介: 李青勇(1995-),男,甘肅白銀人,碩士,研究方向為軌跡分析、軌跡預測。
通訊作者:何兵(1983-),男,陜西西安人,副教授,博士,研究方向為人工智能、數據分析、導航制導與控制。
