基于PLC與HMI的實驗室仿真電梯控制系統(tǒng)設計
2021-08-07 11:56:18吳淑娟
鄂州大學學報 2021年4期
吳淑娟
(閩西職業(yè)技術學院 信息與制造學院,福建 龍巖 364000)
隨著當前城市化的發(fā)展,電梯專業(yè)人才日益緊缺,而作為擔負培養(yǎng)電梯行業(yè)技術技能型人才的高職院校,普遍存在電梯實訓室建設不夠完善,已有設備單一,與工程現(xiàn)場對接不夠的問題;另外隨著計算機輔助設計的日益成熟,在電梯日常運行管理中,開始引入可視化的人機交互動態(tài)管理,以實現(xiàn)便捷的電梯運行管理[1]。為了使學生熟練掌握電梯群控的控制方法以及電梯系統(tǒng)管理的可視化設計,從降低成本角度出發(fā),本文利用實驗室已有的兩臺4 層仿真電梯為研究對象,配以動畫效果強,編程方便的MCGS 觸摸屏作為上位機,通過PLC 編程和HIM 工程設計,開發(fā)一套既能實現(xiàn)單臺電梯運行控制又能實現(xiàn)兩臺電梯并聯(lián)群控控制同時具有可視化遠程監(jiān)控的電梯控制系統(tǒng)。
1 實驗室仿真電梯控制系統(tǒng)設計目的
系統(tǒng)設計的目的是為了對接電梯工程現(xiàn)場,讓學生在實驗室利用已有的仿真電梯實訓設備學習電梯系統(tǒng)的運行與控制,熟悉與工程現(xiàn)場一致的工況,掌握電梯運行控制的方法。以兩臺4 層仿真電梯實訓設備為對象,利用PLC 與MCGS 觸摸屏人機界面,學習電梯運行與控制,使學生能夠直觀掌握控制效果并進行優(yōu)化改進。該系統(tǒng)要實現(xiàn)以下幾點功能:①單梯控制模式下,兩臺電梯可單獨運行,互不影響。每臺電梯應能正確響應任意樓層內(nèi)選、外呼信號;能準確平層停車;能自動或手動開、關門;能根據(jù)預定的響應邏輯運行。②并聯(lián)群控模式下,兩臺電梯可按設定好的群控調(diào)度規(guī)則對外呼信號實行統(tǒng)一調(diào)度管理。③利用上位機觸摸屏設置多畫面人機界面,實現(xiàn)電梯遠程監(jiān)控。
2 單臺電梯的運行控制
2.1 電梯控制系統(tǒng)的硬件結構
實驗室仿真電梯,按照實際電梯縮小比例設計,包含電梯全部要素。電梯的控制器采用三菱FX3U-64MR/ES PLC,以MCGS 的TPC7062K 觸摸屏為上位機。
單臺電梯的控制系統(tǒng)硬件結構如圖1 所示。系統(tǒng)中PLC 接收樓層內(nèi)外呼信號、井道傳感器信號、電梯安全防護信號、曳引機編碼器反饋計數(shù)脈沖等外部信號;PLC 程序處理后驅(qū)動變頻器控制曳引機正、反轉(zhuǎn)運行和啟、停控制,從而實現(xiàn)電梯轎廂的上行、下行以及電梯的自動平層控制。在自動或手動方式下PLC 向電梯轎廂門機發(fā)出相關信號,實現(xiàn)轎廂開、關門控制;PLC 通過七段數(shù)碼管和相關的發(fā)光二極管實時顯示電梯轎廂所在的樓層、呼叫響應以及電梯運行方向等信息;上位機MCGS 觸摸屏通過RS485 通信接口與PLC 進行互訪以實現(xiàn)對電梯的遠程監(jiān)控[2]。
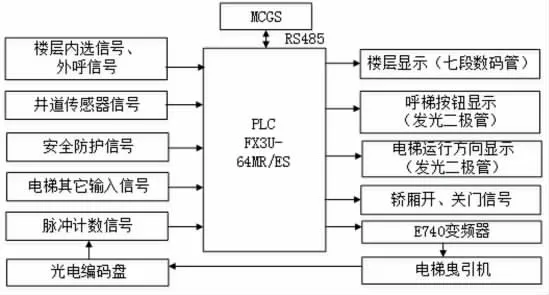
圖1 單臺電梯控制系統(tǒng)硬件結構圖
2.2 單臺電梯控制系統(tǒng)設計
(1)電梯舒適度設計
電梯運行過程中轎廂的振動性、運行的平穩(wěn)性以及電梯啟、停過程中的加、減速度等因素均會影響電梯的舒適度。在系統(tǒng)設計中通過PLC 編程和對變頻器的高、低速運行頻率以及變頻器啟、停的加、減速時間以及緩和機械共振引起的振動等參數(shù)的設置,實現(xiàn)變頻器的速度切換、平穩(wěn)停車、準確平層、減少機械振動,從而達到電梯運行舒適的效果。
(2)電梯基本功能設計
電梯基本功能就是在安全回路和門鎖回路正常的情況下能夠正常響應樓層內(nèi)外呼信號、轎廂到達響應樓層后能夠自動平層、能夠自動或手動開、關門。電梯運行的邏輯必須滿足“先按定向,同向響應,順向截梯,最遠端反向截梯”原則[3]。各功能控制程序流程圖如圖2 至圖5 所示。
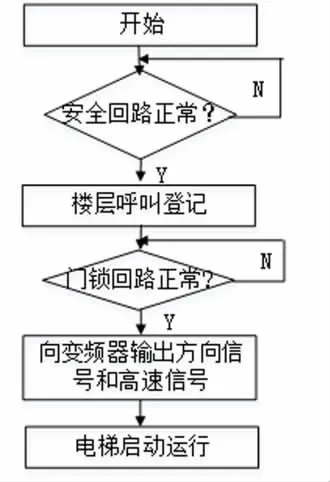
圖2 電梯呼叫響應程序流程圖
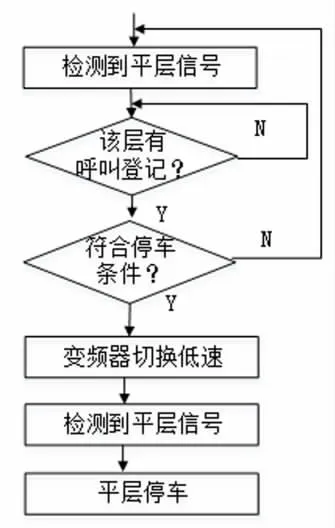
圖3 電梯平層控制程序流程圖
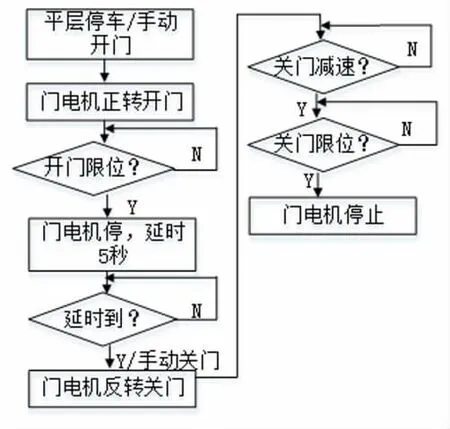
圖4 電梯開關門控制程序流程圖
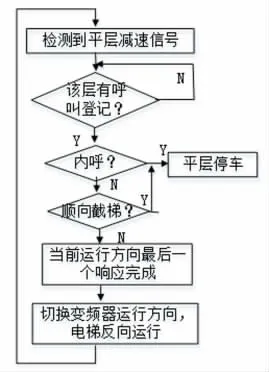
圖5 順向截梯,最遠端反向截梯程序流程圖
3 電梯并聯(lián)群控控制系統(tǒng)設計
3.1 并聯(lián)控制系統(tǒng)硬件結構
本系統(tǒng)的群控電梯由上述兩臺由PLC 控制的4 層仿真電梯組成,兩臺PLC 之間通過RS485 通信接口組成主、從網(wǎng)絡,利用編程軟件分配主、從站,并進行互訪和數(shù)據(jù)共享。實現(xiàn)兩臺電梯的樓層呼叫、轎廂位置以及響應順序等信息的共享,從而達到并聯(lián)群控的統(tǒng)一調(diào)度[4]。以兩臺PLC 的通信為基礎,觸摸屏以多畫面的形式統(tǒng)一展示兩臺并聯(lián)電梯群控系統(tǒng)的監(jiān)控畫面。
3.2 電梯群控控制系統(tǒng)的PLC 程序設計
電梯群控控制中,每臺電梯的內(nèi)呼信號管理仍然與單臺電梯的控制管理一致,但對兩臺電梯的外呼信號要實行統(tǒng)一管理。群控控制研究的目的主要是實現(xiàn)對外呼響應的統(tǒng)一調(diào)度管理。電梯群控調(diào)度規(guī)則應滿足:路程最短、時間最短和任務均分原則[5]。
3.2.1.電梯群控調(diào)度規(guī)則
根據(jù)通信參數(shù)設定將兩臺電梯分成主梯和副梯,每臺電梯的有待召和運行兩種工作狀態(tài)。在外呼請求時,兩臺電梯群控調(diào)度規(guī)則如表1 所示。
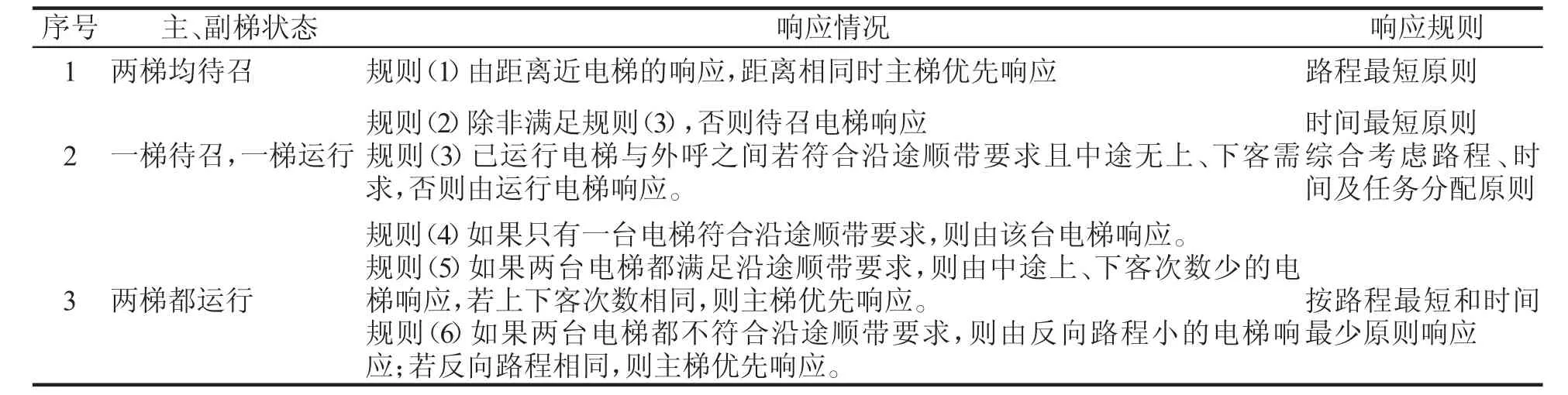
表1 電梯群控調(diào)度規(guī)則
3.2.2 電梯群控程序
群控程序設計時,針對外呼信號的響應情況分為主梯響應和副梯響應兩種情況,根據(jù)預定的調(diào)度規(guī)則,設計群控調(diào)度程序。本系統(tǒng)2 臺三菱FX3UPLC 之間通過RS485 通信連接,采用N:N通信,進行軟元件相互鏈接的功能[6]。N:N 通信共有3 種鏈接模式,本系統(tǒng)采用模式2。電梯群控設計時,將群控調(diào)度程序?qū)懭胫髡綪LC,主站PLC 通過訪問從站PLC 的鏈接位元件和鏈接字元件,獲取副梯運行狀態(tài)及相關樓層位置數(shù)據(jù),實現(xiàn)對外呼信號響應的統(tǒng)一調(diào)度管理。根據(jù)預定的調(diào)度規(guī)則設計的群控調(diào)度流程圖如圖6 所示。
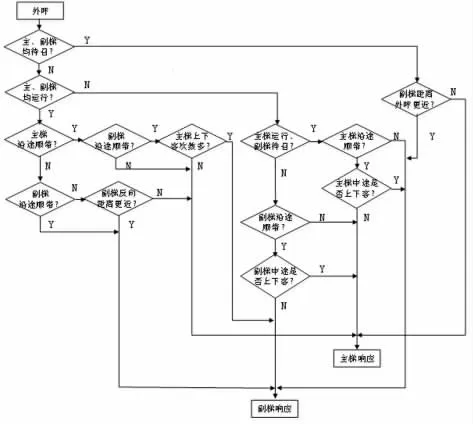
圖6 群控調(diào)度流程圖
群控調(diào)度流程圖中“沿途順帶”的條件是指:電梯上行時,外呼所在樓層比轎廂所在樓層高,且電梯最遠響應樓層高于外呼所在樓層;電梯下行時,外呼所在樓層比轎廂所在樓層低,且電梯最遠響應樓層低于外呼所在樓層。
群控調(diào)度流程圖中涉及的概念及相關計算如下(注:以下“電梯轎廂”指電梯轎廂所在樓層,“外呼”指外呼所在樓層,“最遠響應”指電梯當前方向最遠響應樓層):
(1)“副梯距離更近”指的是副梯轎廂與外呼之間的距離小于主梯轎廂與外呼之間的距離。相關計算公式為:電梯轎廂與外呼距離=電梯轎廂-外呼。
(2)“副梯反向更離更近”指的是當外呼響應方向與主、副轎廂當前運行方向相反時,副梯轎廂與外呼之間的反向距離小于主梯轎廂與外呼之間的反向距離。相關計算公式為:電梯轎廂與外呼的反向距離=電梯最遠響應與外呼之間的距離+電梯轎廂與電梯最遠響應之間的距離。
3.2.3 基于MCGS 的上位機HIM 工程設計
系統(tǒng)采用MCGS 的TPC7062K 觸摸屏與PLC同步,實現(xiàn)聯(lián)機運行,觸摸屏系統(tǒng)一方面要能真實顯示出電梯運行過程中的各種信息以實現(xiàn)電梯系統(tǒng)的遠程監(jiān)視,另一方面要能夠方便在觸摸屏上進行相關操作以實現(xiàn)電梯系統(tǒng)的遠程控制。為此在觸摸屏上制作2 個監(jiān)控界面。
界面一中顯示兩臺電梯的運行過程監(jiān)視畫面。包括兩臺電梯的轎廂、對重、鋼絲繩的運行軌跡以及轎廂開、關門畫面;兩臺電梯的轎廂位置、運行方向、呼叫響應指示等信息;兩臺電梯當前轎廂的實時高度、變頻器運行頻率等參數(shù),界面一中設置有進入界面二的按鈕。界面二中設置對兩臺電梯的各種遠程操作控制,包括電梯群控模式選擇、主、副梯的測試運行模式選擇、司機運行模式選擇、緊急救援模式選擇、夜間防盜模式選擇以及群控運行和單梯運行的切換選擇等。界面二中設有進入界面一的按鈕。
HIM 工程設計中對各種操作模式選擇和顯示信息的地址都進行了固定定義,并同步進行了轎廂、對重、鋼絲繩及轎廂門開、關的運行軌跡動畫腳本編寫、文字可見度動畫設置,并在PLC 中增加相關的程序以使HIM 功能得以實現(xiàn)。
3.3 系統(tǒng)實現(xiàn)與測試
系統(tǒng)設計完成后,經(jīng)過不斷的調(diào)試和程序優(yōu)化,使其功能不斷完善,取得較好的控制效果,并以此系統(tǒng)設計為基礎,2017 年、2018 年、2019 年三次代表福建省參加全國職業(yè)院校技能大賽 “智能電梯裝調(diào)與維護”賽項,分別獲得全國二等獎、全國一等獎、全國二等獎。
4 結語
依托兩臺4 層仿真電梯實訓設備,對電梯控制系統(tǒng)的PLC 編程和HIM 工程設計進行了較為深入的研究,具有較好的參考價值。學生可以在充分學會基本的PLC 控制指令的基礎上,利用該平臺進行電梯控制系統(tǒng)的設計與調(diào)試,其人機交互能力強,動畫豐富,成本低廉,適合目前高職院校電梯及相關專業(yè)開展電梯與PLC 控制的綜合實驗實訓教學。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
小學生學習指導(低年級)(2018年3期)2018-01-31 02:18:58
家庭影院技術(2017年9期)2017-09-26 03:41:45
小學生時代·綜合版(2016年7期)2016-05-14 17:53:49
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25