基于改進動態窗口法的無人水面艇自主避碰算法
2021-08-09 06:09:53劉漸道劉文張英俊李元奎
上海海事大學學報 2021年2期
劉漸道 劉文 張英俊 李元奎
摘要:為研究避碰規則、無人水面艇(unmanned surface vessel, USV)運動學特點和海上交通復雜度等因素約束下的USV自主避碰技術,在分析初始動態窗口法的基礎上,考慮《國際海上避碰規則》(International Regulations for Preventing Collisions at Sea, COLREGs)關于避碰行動時機、避讓幅度、復航時機等方面的要求,建立融合避碰規則的動態窗口模型,設計融合避碰規則的動態窗口法。通過對比仿真實驗驗證該方法的可行性和有效性,具有一定的現實意義。
關鍵詞: 無人水面艇(USV); 動態窗口法; COLREGs; 自主避碰
中圖分類號: U675.96;TP273+.5
文獻標志碼: A
Automatic collision avoidance algorithm of unmanned surface
vessels based on improved dynamic window approach
LIU Jiandao1, LIU Wen2, ZHANG Yingjun1, LI Yuankui1
(1.Navigation College, Dalian Maritime University, Dalian 116026, Liaoning, China;
2.National Engineering Laboratory for Transportation Safety & Emergency Informatics,
China Transport Telecommunications & Information Center, Beijing 100011, China)
Abstract:
In order to study the automatic collision avoidance technology of unmanned surface vessels (USVs), considering the
constraints of collision avoidance rules,
USV kinematic characteristics and the complexity of maritime traffic, the dynamic window model subject to collision avoidance rules is established based on the analysis of the original dynamic window approach. In the model, the requirements of
International Regulations for Preventing Collisions at Sea (COLREGs), such as the time of collision avoidance action, the range of collision avoidance action and the time to go back to the channel, are considered. The dynamic window algorithm subject to collision avoidance rules is designed. The feasibility and effectiveness of the method are verified by comparative simulation experiments, which shows that the method is of certain practical significance.
Key words:
unmanned surface vessel (USV); dynamic window approach; COLREGs; automatic collision avoidance
收稿日期: 2020-05-11
修回日期: 2020-07-17
基金項目:
國家自然科學基金(51679025,51709032);中央高校基本科研業務費專項資金(3132019313); 大連海事大學教改項目(2020Y6)
作者簡介:
劉漸道(1983—),男,河北唐山人,講師,博士研究生,研究方向為船舶智能航行,(E-mail)liujiandao@dlmu.edu.cn;
劉文(1987—),男,吉林扶余人,高級工程師,博士,研究方向為水上智能運輸系統,(E-mail)liuwen@cttic.cn;
張英俊(1965—),男,山東聊城人,教授,博導,博士,研究方向為智能運輸理論與系統,(E-mail)zhangyj@dlmu.edu.cn
0 引 言
無人水面艇(unmanned surface vessel, USV)作為一種輕量化智能水上運載工具,可應用于軍事作戰、海事監管和海洋環境檢測等領域,受到越來越多的關注。它集速度快、體積小、機動性強等特點于一身,可以快速、高效、準確地完成任務。在復雜的海洋環境中,存在很多威脅USV航行安全的障礙物,因此,自主避碰技術是USV的核心技術之一。自主避碰技術是平面機器人路徑規劃領域中的重要部分,包括全局路徑規劃技術和局部避碰技術。具體地,全局路徑規劃技術是在環境信息已知的情況下,根據任務目標(如時間最短或距離最短)給機器人規劃出一條可行路徑;局部避碰技術指機器人在行進過程中遇到動態障礙物時采取正確合理的規避行動,及時有效地調整速度或方向,盡可能快速安全航行。
目前,許多國內外學者對船舶避碰路徑規劃問題做了相關研究,所采用的研究方法包括遺傳算法、Dijkstra算法、A*算法、蟻群算法、勢場法、速度障礙法、向量場直方圖法等[1]。倪生科等[2]針對不同會遇態勢下的船舶避碰路徑規劃問題,提出一種混合遺傳算法,使路徑規劃性能和效率都得到了提高;LAZAROWSKA[3-4]和TSOU等[5]利用蟻群算法研究了多船會遇局面下的避碰路徑規劃;LYU等[6]改進了傳統的人工勢場法,用來避讓動、靜態障礙物,并研究了目標船采取不協調避碰行動時本船應采取的行動;PERERA等[7]根據避碰規則和專家知識,采用貝葉斯網絡、并行決策等多種方法,提出基于模糊邏輯的避碰決策系統;陳超等[8]提出基于可視圖的A*算法來解決全局路徑規劃問題;莊佳園等[9]提出一種基于電子海圖的距離尋優Dijkstra算法,為解決USV全局路徑規劃問題提供了一種方法;KUWATA等[10]提出基于速度障礙法的USV避碰方法,并結合《國際海上避碰規則》(International Regulations for Preventing Collisions at Sea, COLREGs)制定USV避碰行動方案;吳博等[11]研究了基于速度障礙法并考慮風、流影響的USV自主避碰算法;盧艷爽[12]考慮海事規則,設計了一種基于速度障礙法的局部避碰算法;BENJAMIN等[13]在滿足部分航行約束條件下,利用多目標優化方法解決無人艇避碰問題;LOE[14]將動態窗口法用于USV的自主避碰,但未考慮避碰規則等因素對避碰的影響;唐平鵬等[15]利用動態窗口法求解USV避碰角速度和線速度,以USV的偏航角度和速度為優化目標,以最小回轉半徑和障礙物動態為約束條件,通過快速搜索USV的動態窗口法獲取USV避碰方案。
綜合分析上述研究成果發現,研究人員關注USV自主避碰方法的理論研究,雖然通過仿真實驗驗證了一些方法的可行性,但還存在以下問題:有的研究避讓場景較簡單;部分研究雖然實現了動、靜態障礙物的安全避讓,但是沒有或較少考慮避碰規則;有的研究忽略了船舶運動性能對避讓方案的影響。根據目前的研究狀況以及未來的發展趨勢,充分考慮避碰規則、USV運動學特點和海上交通復雜度等因素是USV自主避碰技術的發展方向。因此,本文選取與USV運動學性能結合較好的動態窗口法,并充分考慮避碰規則和動、靜態障礙物等因素的影響進行研究,使其更符合USV的實際避碰情況。
1 動態窗口法
1.1 動態窗口法
基于動態窗口法的避碰方法首次由FOX等[16]于1997年提出,被用于機器人的局部避障。將該方法應用到USV自主避碰領域時要考慮USV的運動學特點,利用USV在給定時間窗內能達到的速度和方向進行避碰計算。
動態窗口法假定在給定的時間Δt內,USV以恒定的縱向速度u和角速度r航行,因此USV的運動軌跡是一條直線或定半徑的圓弧。當r≠0時,在第i個時間段Δt內,USV運動軌跡——圓弧的圓心(ox,i,oy,i)和半徑Rr,i可以表示為
ox,i=x-uirisin φ,
oy,i=y+uiricos φ,
Rr,i=uiri (1)
式中:ui和ri為USV在第i個時間段Δt內的縱向速度和角速度;(x,y)為USV的位置;φ為航向。
通過式(2)~(4)可確定USV在給定時間窗Δt內可以達到的速度矢量(u,r)的集合:
USV在給定時間窗Δt內能達到的縱向速度u和角速度r分別為
u∈[uc-u·Δt,uc+u·Δt]
r∈[rc-r·Δt,rc+r·Δt] (2)
其約束為
u∈[umin,umax],
r∈[rmin,rmax](3)
式中:uc和rc分別為USV當前的縱向速度和角速度。
為保證USV安全,在最大減速條件下,USV速度應能在撞擊障礙物之前減為0,則
u≤(2d(u,r)u·)1/2
r≤(2d(u,r)r·)1/2 (4)
式中,d(u,r)為(u,r)對應軌跡與最近障礙物的距離。
假設USV在時刻t的速度矢量為(ut,rt),在確定USV在時刻t+1相對于時刻t的位移和航向時,由于時間間隔很短,可以將兩點之間圓弧軌跡看作直線軌跡,則位置和航向的更新公式為
xt+1=xt+utΔtcos φt
yt+1=yt+utΔtsin φt
φt+1=φt+rtΔt (5)
1.2 評價函數
為便于工程計算,將速度矢量(u,r)離散化,每個(u,r)對應一條軌跡,利用評價函數確定最優軌跡。具體方法是將各速度矢量代入評價函數中計算其對應的評價函數值,取最大值對應的速度矢量作為USV的速度矢量,并采用該速度矢量航行,更新USV位置,直至到達目的地。評價函數設計的原則為:USV能夠安全避開障礙物,盡快向目的地前進。評價函數為
Gdw(u,r)=αd(u,r)+βφhead(u,r)+
γvspeed(u,r) (6)
式中:距離函數d(u,r)的值越大,說明當前軌跡距離障礙物越遠;用航向函數φhead(u,r)衡量預估軌跡終點航向與目的地方向的對準程度,φhead(u,r)=
180°-θ(其中θ為相對于USV航向的目的地的方位角,如圖1所示),φhead(u,r)值越大,表示對準度越高;用速度函數vspeed(u,r)評估當前軌跡上USV的速度。評價函數的3個組成部分都是必需的,缺一不可。α、β和γ分別為距離函數、航向函數和速度函數對應的權重因數。在設置權重因數時,如果僅最大化φhead(u,r)函數,則USV向目的地航行,很有可能與障礙物發生碰撞;如果最大化d(u,r)和vspeed(u,r)函數,雖然能夠避開障礙物,但是USV不能向目的地運動,產生繞遠現象。因此,應設置合理的權重因數,使目標函數值最大,使得USV不僅能避開障礙物,而且能
向目的地以較快速度航行。
評價函數的3個組成部分的量綱不同,在計算前要將每個部分做歸一化處理:
z′=z-zminzmax-zmin? (7)
式中:z∈{d(u,r),φhead(u,r),vspeed(u,r)};zmin和zmax分別為z的最小值和最大值。
2 考慮避碰規則的動態窗口模型
2.1 會遇局面劃分
當USV與他船形成不同會遇局面時,應采取符合避碰規則的行動。將USV與目標船互見中構成碰撞危險的局面分成3類,見圖2。
(1)對遇。當USV與目標船在相反或接近相反的航向上航行且有碰撞危險時,即航向角度差Δφ滿足180-Δφ<2.5°時,USV應向右轉向,從目標船的左舷通過。
(2)交叉。當USV與目標船的航向交叉且有碰撞危險時,如果航向角度差Δφ滿足67.5°≤Δφ≤177.5°,則構成左舷交叉,此時USV為直航船,目標船為讓路船;如果航向角度差Δφ滿足182.5°≤Δφ≤292.5°,則構成右舷交叉,此時目標船為直航船,USV為讓路船。
(3)追越。當USV與目標船的航向角度差Δφ滿足Δφ<67.5°時,USV應向左轉向,從目標船的左舷通過。
2.2 融合避碰規則的動態窗口模型
在避讓船舶時,USV應遵守避碰規則,這已成為研究USV智能避碰的共識。由于初始動態窗口法沒有考慮USV對避碰規則的遵守和適用問題,所以對動態窗口法進行改進,讓其選擇的速度矢量及形成的避碰路徑符合避碰規則要求。COLREGs第16條規定,須給他船讓路的船,應盡可能及早地采取大幅度的行動,寬裕地讓清他船。采取避碰行動的時機、避讓幅度、何時復航以及安全會遇距離是讓路船采取避碰行動的4個關鍵要素。因此,建立避碰時機模型、避讓幅度模型和復航時機模型,并將其融入動態窗口法中,是建立融合避碰規則的動態窗口模型的關鍵。
當USV與目標船會遇時,通過計算最近會遇距離dCPA和到達最近會遇點的時間tCPA確定是否有碰撞危險。確定避碰時機模型的方法包括基于船舶領域的方法、基于船舶碰撞危險度的方法,以及采用時間或距離來確定的方法等。本文采用時間或距離確定避碰時機。建立的避碰時機模型為dRNG=vrtCPA,其中vr為他船相對于USV的速度。當USV與目標船有碰撞危險,且二者之間的距離接近dRNG時,USV應采取避碰行動。該模型能夠反映不同會遇局面下采取避碰行動的時機,例如:在對遇局面下,兩船間的相對速度較大,采取避讓行動的距離應該較遠;在追越局面下,由于兩船間的相對速度較小,讓路船采取避讓行動的距離比對遇局面的近一些,符合航海實際。實際情況下可以根據需要設置USV開始采取避讓行動的距離dRNG,例如:在對遇局面下,當vr=10 m/s時,若取tCPA=1 min,則有dRNG=600 m,由于USV的機動性較好,該距離能保證USV有足夠的時間采取避讓行動。
COLREGs對避讓幅度的要求為:應大得足以使他船用視覺或雷達觀測時容易察覺到,避免對航向、航速做一連串小的變動,并且滿足兩船在安全會遇距離dSPD上駛過。轉向幅度的確定如圖3所示:USV位于O點,Y軸為USV船首方向,X軸為USV正橫方向,目標船位于M點,
vo和vt分別為USV和目標船的速度。USV在改向前與目標船的最近會遇距離dCPA小于安全會遇距離dSPD,有碰撞危險。在點A3處,USV采取避讓行動,向右轉向ΔC,以dSPD通過目標船。USV改向前后目標船的相對運動線分別為l1和l2,l2的平行線為l3。通過平面幾何計算,可以確定轉向幅度ΔC。與動態窗口模型相結合,轉向幅度ΔC=rΔt,其中Δt為動態窗口預測時間。因此,要選擇使USV達到一定的轉向幅度的合適的角速度。例如,當ΔC=30°和Δt=5 s時,需要USV的角速度為r=0.11 rad/s。
除對轉向幅度有要求外,在不同會遇局面下,應選擇符合避碰規則要求及海員通常做法的轉向方向。例如,當USV追越他船時,如當時環境許可,盡可能從他船左舷追越。因此,在追越局面下,應選擇控制USV向左轉向的速度矢量。
確定復航時機是USV完成避碰行動的重要步驟。不同會遇局面下復航時機的確定方法不同,本文確定復航時機的原則是:在兩船之間無碰撞危險時,USV開始復航,向設定的目的地運動。例如,對于對遇局面,當他船位于USV正橫位置時,USV復航,之后盡快向目的地運動。建立的復航時機模型為Rθ=π/2,其中Rθ為他船相對于USV的舷角。
在動態窗口目標函數Gdw(u,r)的基礎上,添加規則函數gcolreg(u,r)及其權重因數η。因此,融合了避碰規則的動態窗口法的目標函數為
G(u,r)=αd(u,r)+βφhead(u,r)+
γvspeed(u,r)+ηgcolreg(u,r)? (8)
其中,gcolreg(u,r)用來計算USV采取避讓行動的距離以及確定轉向幅度和復航時機。在開始采取避讓行動及確定避讓幅度后,評估每個矢量符合避碰規則的程度。ri的符合度δi的確定方法如下:
δi=ri/r*,ri≤r*
1-(ri-r*)/r*,ri>r*(9)
式中:r*為安全避讓所需的角速度。
綜上,利用式(8)計算各速度矢量對應的評價函數值,取最大值對應的速度矢量航行。該模型不但能夠保障USV安全避讓障礙物,而且充分考慮了避碰規則約束。
3 避碰算法設計
用本文設計的基于動態窗口法的避碰算法計算USV在給定時間窗內能達到的速度矢量,并根據避碰規則約束,選擇符合避碰規則要求的速度矢量進行避碰,過程包括碰撞危險判斷、會遇局面劃分、選擇最佳速度矢量等。基于動態窗口法的USV自主避碰算法流程見圖4。
(1)初始化環境信息,主要包括USV的起點和目的地信息以及動、靜態障礙物信息。動態障礙物信息主要包括目標船縱向航速、航向、當前位置等,靜態障礙物信息主要指其位置和形狀信息;本算法假設動、靜態障礙物的信息已知;實際海上航行時這些信息可以通過AIS和雷達獲取。
(2)初始化動態窗口信息,主要包括動態窗口的速度矢量、動態窗口的更新時間等。
(3)判斷動、靜態障礙物與USV是否存在碰撞
危險。如USV與靜態障礙物存在碰撞危險,則保持安全距離避讓;
如USV與目標船存在碰撞危險,則根據避碰規則對會遇局面進行劃分,判斷USV為讓路船或直航船。
(4)如果USV為讓路船,則進行迭代計算。在每次迭代過程中,結合避碰的不同階段,依據上文所述的避碰時機模型、避讓幅度模型和復航時機模型,選擇最優速度矢量,也就是選擇使G(u,r)的值最大的避讓速度矢量(u,r)航行,并更新USV的位置。如果USV為直航船,則保持航向和航速航行,并更新USV的位置。為避免USV頻繁調整航行狀態,對
(Δu,Δr)設置閾值,如果(Δu,Δr)小于閾值,則保持上一時間段的航向和航速航行。
(5)在USV的位置更新后,判斷USV是否已到達目的地。如果未到達目的地,則進行下一次迭代,更新動態窗口,直至USV到達目的地,提示避讓障礙物成功。如果達到設置的最大迭代次數時USV還未到達目的地,算法也會結束,提示避讓障礙物失敗。
4 仿真驗證
通過仿真驗證基于改進動態窗口法的USV避碰算法的有效性。仿真環境為MATLAB R2015b。以文獻[14]的初始動態窗口法和本文提出的融合避碰規則的動態窗口法為避碰策略進行對比驗證。仿真實驗參數設置如下:USV最大速度為22 m/s,最大加速度為0.6 m/s2,最大角速度為0.35 rad/s,最大角加速度為0.1 rad/s2;算法最大迭代次數為200;目標函數的權重因數分別為α=1,β=1,γ=1,η=0.6。分別模擬兩船對遇、追越、交叉相遇及動、靜態障礙物混合場景下的USV避讓過程。不同會遇局面下USV和目標船的初始參數設置見表1。
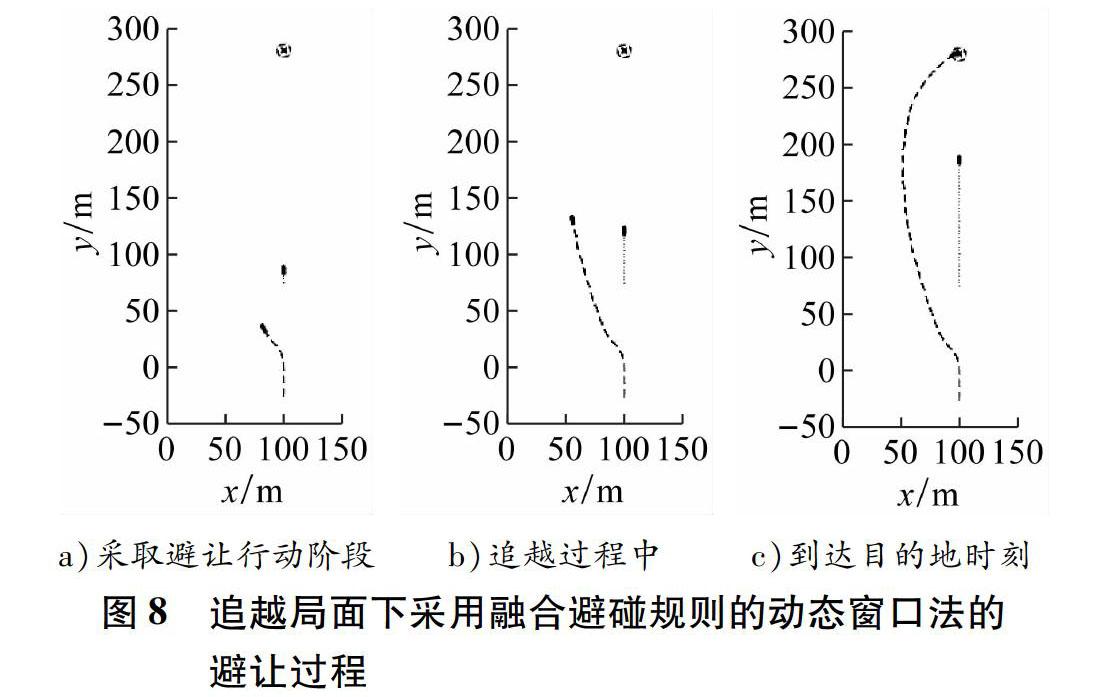
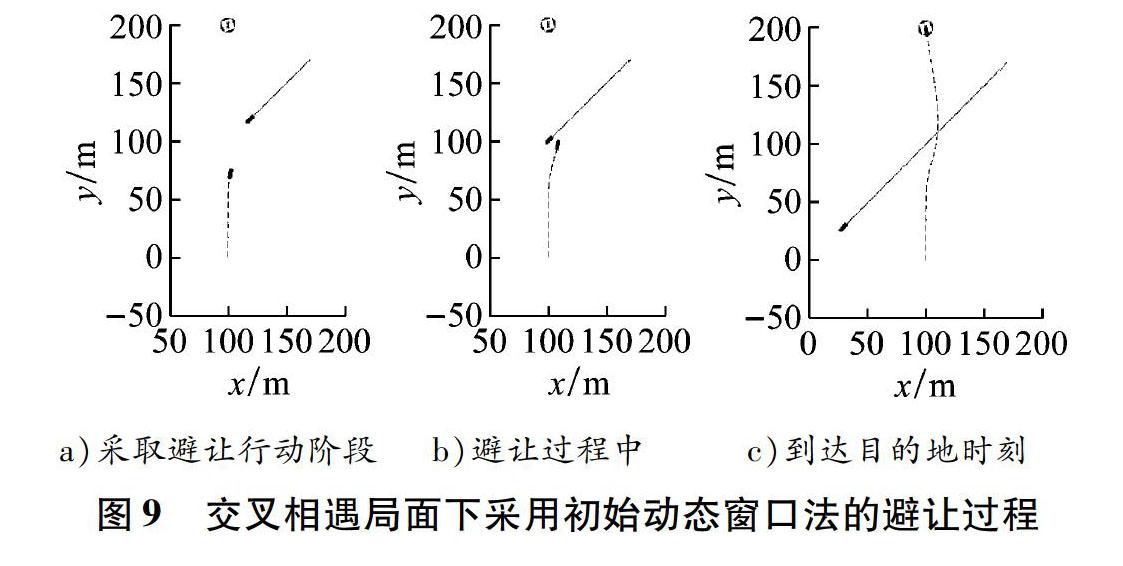
仿真1、2和3分別對應對遇、追越和交叉相遇局面,兩船存在碰撞危險,假設目標船保速保向航行,不采取避碰行動。不同會遇局面下USV的避讓過程見圖5~10,其中:圖5、7、9為采用初始動態窗口法的避讓過程;圖6、8、10為采用融合避碰規則的動態窗口法的避讓過程,其中dRNG取150 m,采取避碰行動時的角速度r取0.15 rad/s。
仿真1(對遇局面)結果分析。在避讓時機選擇方面,圖5a顯示在兩船之間的距離約為50 m時采取避讓行動,圖6a顯示在兩船之間的距離為150 m時采取避讓行動;因為兩船對遇航行,相對速度大,應盡早采取避讓行動,所以后者的避讓時機選擇符合避碰規則要求。在避讓幅度和避讓方向方面,圖5 顯示USV向左小幅度轉向,圖6顯示USV向右大幅度轉向,后者符合避碰規則要求。從整個避讓過程看,采用初始動態窗口法時USV雖然能夠避開目標船,但是避讓時機晚、避讓幅度小,而且選擇向左轉向顯然不符合避碰規則的要求。融合避碰規則的動態窗口法在避讓時機、避讓幅度等方面表現更好,滿足COLREGs關于避讓行動早、大、寬、清的要求。
仿真2(追越局面)結果分析。在避讓時機選擇方面,圖7a顯示在兩船之間的距離約為40 m時采取避讓行動,圖8a顯示在兩船之間的距離為80 m時采取避讓行動。追越局面下采取的避讓行動時機較對遇局面下的可以遲一些,但根據避碰規則要求,
也應盡早進行,因此后者的避讓時機選擇更為合理。在避讓幅度和避讓方向方面,圖7b顯示USV向右小幅度轉向,圖8b顯示USV向左大幅度轉向,顯然后者符合COLREGs關于追越的避讓要求。從避讓路徑看,雖然圖8c中的路徑長度明顯大于圖7c中的路徑長度,但是從安全性和遵守COLREGs的角度看,融合避碰規則的動態窗口法明顯占優。
仿真3(交叉相遇局面)結果分析。在避讓時機選擇方面,圖9a顯示在兩船之間的距離約為50 m時采取避讓行動,圖8a顯示在兩船之間的距離約為140 m時采取避讓行動,因此后者的避讓時機更早一些。在避讓幅度和避讓方向方面,圖9b和圖10b都顯示USV向右轉向,但圖10b顯示USV向右大幅度轉向,顯然后者符合避碰規則要求。從避讓路徑看,雖然圖9c中的路徑長度明顯短于圖10c中的路徑長度,但是從安全性和遵守避碰規則的角度看,融合避碰規則的動態窗口法明顯占優。
仿真4:為充分考慮海上交通復雜度的影響,模擬動、靜態障礙物混合場景下USV在受限水域的避讓過程。USV和目標船1、2、3的初始參數設置如表1所示,靜態障礙物的設置如圖11所示。圖11a顯示USV先向左轉向避讓最近的靜態障礙物,然后
向目的地航行。圖11b顯示USV通過一艘目標船船尾后,與另一艘目標船形成對遇局面,USV向右轉向,確保以設定的最小安全會遇距離駛過這艘目標船;USV與第3艘目標船無碰撞危險。圖11c顯示了USV在駛向目的地的過程中形成的避讓路徑。
通過仿真1、2和3可以看出:采用初始動態窗口法和融合避碰規則的動態窗口法都能夠避讓動態障礙物,但是初始動態窗口法沒有考慮避讓時機、避讓幅度、避讓方向和復航時機等因素,因此融合避碰規則的動態窗口法在避讓的安全性及符合規則方面表現更好。仿真4表明融合避碰規則的動態窗口法同樣適用于動、靜態障礙物混合場景下的避讓。
5 結 論
針對無人水面艇(USV)避讓動、靜態障礙物的問題,采用動態窗口法建立融合避碰規則的USV避碰模型。結合USV的運動學特點,較充分地考慮依照《國際海上避碰規則》(COLREGs)關于早、大、寬、清的要求進行避讓。通過仿真對比初始動態窗口法與融合避碰規則的動態窗口法,證明融合避碰規則的動態窗口法在保證避讓障礙物的同時,在遵守規則及安全性方面相對于初始動態窗口法有明顯優勢,具有一定的實際意義。
參考文獻:
[1]STATHEROS T, HOWELLS G, MCDONALD-MAIER K. Autonomous ship collision avoidance navigation concepts, technologies and techniques[J]. The Journal of Navigation, 2008, 61: 129-142.
[2]倪生科, 劉正江, 蔡垚, 等. 基于混合遺傳算法的船舶避碰路徑規劃[J]. 上海海事大學學報, 2019, 40(1): 21-26. DOI: 10.13340/j.jsmu.2019.01.004.
[3]LAZAROWSKA A. Ships trajectory planning for collision avoidance at sea based on ant colony optimization[J]. The Journal of Navigation, 2015, 68: 291-307.
[4]LAZAROWSKA A. Multi-criteria ACO-based algorithm for ships trajectory planning[J].The International Journal on Marine Navigation and Safety of Sea Transportation, 2017, 11(1): 31-36. DOI: 10.12716/1001.11.01.02.
[5]TSOU M C, HSUEH C K. The study of ship collision avoidance route planning by ant colony algorithm[J]. Journal of Marine Science and Technology, 2010, 18(5): 746-756.
[6]LYU Hongguang, YIN Yong. COLREGS-constrained real-time path planning for autonomous ships using modified artificial potential fields[J]. The Journal of Navigation, 2019, 72(3): 588-608. DOI: 10.1017/S0373463318000796.
[7]PERERA L P, CARVALHO J P, GUEDES C G. Fuzzy logic based decision making system for collision avoidance of ocean navigation under critical collision conditions[J]. Journal of Marine Science and Technology, 2011, 16(1): 84-99. DOI: 10.1007/s00773-010-0106-x.
[8]陳超, 唐堅. 基于可視圖法的水面無人艇路徑規劃設計[J]. 中國造船, 2013, 54(1): 129-135.
[9]莊佳園, 萬磊, 廖煜雷, 等. 基于電子海圖的水面無人艇全局路徑規劃研究[J]. 計算機科學, 2011, 38(9): 211-219.
[10]KUWATA Y K, WOLF M T, ZARZHITSKY D, et al. Safe maritime autonomous navigation with COLREGs, using velocity obstacles[J]. IEEE Journal of Oceanic Engineering, 2014, 39(1): 110-119.
[11]吳博, 熊勇, 文元橋. 基于速度障礙原理無人艇自動避碰算法研究[J]. 大連海事大學學報, 2014, 40(2): 57-60.
[12]盧艷爽. 水面無人艇路徑規劃算法研究[D]. 哈爾濱: 哈爾濱工程大學, 2010.
[13]BENJAMIN M, CURCIO J, LEONARD J, et al. Navigation of unmanned marine vehicles in accordance with the rules of the road[C]∥IEEE International Conference on Robotics and Automation. ICRA, 2006: 3581-3587. DOI: 10.1109/ROBOT.2006.1642249.
[14]LOE. Collision avoidance concepts for marine surface craft[R]. Norway: Norwegian University of Science and Technology, 2007.
[15]唐平鵬, 張汝波, 史長亭, 等. 水面無人艇分層策略局部危險規避[J]. 應用科學學報, 2013, 31(4): 418-426. DOI: 10.3969/j.issn.0255-8297.2013.04.013.
[16]FOX D, BURGARD W, THRUN S. The dynamic window approach to collision avoidance[J]. IEEE Robotics & Automation Magazine, 1997, 4(1): 23-33. DOI: 10.1109/100.580977.
(編輯 趙勉)
