基于遞歸模糊小波神經(jīng)網(wǎng)絡(luò)的INS-GNSS組合導(dǎo)航算法
2021-08-09 06:09:53于仁海曹春燕張闖房美含
上海海事大學(xué)學(xué)報(bào) 2021年2期
于仁海 曹春燕 張闖 房美含
摘要:為提高慣性導(dǎo)航系統(tǒng)(inertial navigation system, INS)與全球衛(wèi)星導(dǎo)航系統(tǒng)(global navigation satellite system, GNSS)相結(jié)合的組合導(dǎo)航系統(tǒng)在GNSS中斷期間的精度,提出一種基于遞歸模糊小波神經(jīng)網(wǎng)絡(luò)(recurrent fuzzy wavelet neural network,RFWNN)的啟發(fā)式神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu),用于INS的速度和位置誤差補(bǔ)償。
在GNSS正常工作時(shí),利用INS-GNSS數(shù)據(jù)將RFWNN訓(xùn)練成一個(gè)高精度的預(yù)測(cè)模型;在GNSS中斷期間,利用被訓(xùn)練好的RFWNN模型補(bǔ)償INS的速度和位置誤差。
為對(duì)所提出的RFWNN輔助INS-GNSS的性能進(jìn)行評(píng)估,進(jìn)行實(shí)船試驗(yàn),結(jié)果表明利用RFWNN能夠有效地對(duì)GNSS中斷時(shí)的速度和位置信息進(jìn)行高精度修正。
關(guān)鍵詞: 慣性導(dǎo)航系統(tǒng)(INS); 全球衛(wèi)星導(dǎo)航系統(tǒng)(GNSS); 遞歸模糊小波神經(jīng)網(wǎng)絡(luò)(RFWNN)
中圖分類號(hào): U666.11
文獻(xiàn)標(biāo)志碼: A
收稿日期: 2020-08-31
修回日期: 2020-12-30
基金項(xiàng)目:
國(guó)家自然科學(xué)基金(51939001,61976033);大連市重點(diǎn)學(xué)科重大課題科技創(chuàng)新基金(2018J11CY022)
作者簡(jiǎn)介:
于仁海(1982—),男,遼寧丹東人,講師,博士研究生,研究方向?yàn)榇皩?dǎo)航,(E-mail)yangaijun@163.com;
曹春燕(1998—),女,江蘇南通人,碩士研究生,研究方向?yàn)榇皩?dǎo)航,(E-mail)ccy2035@163.com;
張闖(1980—),男,遼寧昌圖人,副教授,博士,研究方向?yàn)榇敖M合導(dǎo)航,(E-mail)zhangchuang@dlmu.edu.cn
INS-GNSS integrated navigation algorithm based on
recurrent fuzzy wavelet neural network
YU Renhai, CAO Chunyan, ZHANG Chuang, FANG Meihan
(Navigation College, Dalian Maritime University, Dalian 116026, Liaoning, China)
Abstract:
To improve the precision of the integrated navigation system that combines the inertial navigation system (INS) and the global navigation satellite system (GNSS) during GNSS interruption, a heuristic neural network structure based on the recurrent fuzzy wavelet neural network (RFWNN) is proposed to compensate the speed and position errors of INS.
The RFWNN is trained into a high-accuracy prediction model by the INS-GNSS data when GNSS works normally, and the? speed and position errors of INS are compensated by the trained RFWNN? during GNSS interruption.
To evaluate the performance of the proposed RFWNN in INS-GNSS integrated navigation, the real ship tests were executed, and the results show that RFWNN can effectively correct the speed and position information during GNSS interruption.
Key words:
inertial navigation system (INS); global navigation satellite system (GNSS); recurrent fuzzy wavelet neural network (RFWNN)
0 引 言
全球衛(wèi)星導(dǎo)航系統(tǒng)(global navigation satellite system,GNSS)和微機(jī)電系統(tǒng)(micro-electro-mechanical system,MEMS)輔助的慣性導(dǎo)航系統(tǒng)(inertial navigation system,INS)是兩種常用的位置和速度信息源。GNSS可以提供三維位置和速度的精確信息,但其性能取決于外部環(huán)境和衛(wèi)星的可見(jiàn)性,在某些環(huán)境條件下存在更新率低和信號(hào)中斷的問(wèn)題[1]。相反,INS是一種自主系統(tǒng),通過(guò)對(duì)陀螺儀和加速度計(jì)測(cè)得的真實(shí)角速率和比力進(jìn)行連續(xù)積分,可以獲得位置、速度和方位角信息,但是INS的陀螺儀漂移誤差和加速度計(jì)偏差會(huì)隨時(shí)間的推移而變大[2]。將INS與GNSS組合(以下將該組合導(dǎo)航系統(tǒng)稱為INS-GNSS),可以彌補(bǔ)INS和GNSS各自的缺點(diǎn),提高導(dǎo)航系統(tǒng)的精度。在INS-GNSS中,卡爾曼濾波(Kalman filter,KF)因其實(shí)用性而得到廣泛的應(yīng)用[3]。當(dāng)GNSS中斷導(dǎo)致定位精度嚴(yán)重下降時(shí),INS-GNSS切換到純INS模式繼續(xù)導(dǎo)航。然而,純INS受導(dǎo)航數(shù)據(jù)誤差累積的影響,定位精度會(huì)隨時(shí)間逐步降低,因此INS-GNSS在GNSS中斷期間的性能會(huì)下降。
基于人工神經(jīng)網(wǎng)絡(luò)(artificial neural network,ANN)結(jié)構(gòu)的人工智能(artificial intelligent,AI)機(jī)制可以有效改善INS-GNSS的性能,使INS-GNSS在GNSS中斷時(shí)仍可獲得連續(xù)可靠的導(dǎo)航信息。當(dāng)GNSS正常工作時(shí),通過(guò)調(diào)整神經(jīng)元之間的連接權(quán)值和INS的位置或速度誤差,訓(xùn)練ANN來(lái)輔助INS-GNSS;經(jīng)過(guò)訓(xùn)練的ANN在GNSS中斷時(shí)能夠補(bǔ)償純INS的數(shù)據(jù)誤差。一些將AI技術(shù)應(yīng)用于組合導(dǎo)航領(lǐng)域的研究,與本文最終的應(yīng)用場(chǎng)景具有聯(lián)系,近年來(lái)的一些AI技術(shù)涉及各種輸入傳感器數(shù)據(jù)和導(dǎo)航結(jié)果。CHIANG等[4]討論了一種利用多層前饋神經(jīng)網(wǎng)絡(luò)與反向傳播學(xué)習(xí)算法融合的INS和差分全球定位系統(tǒng)(differential global position system,DGPS)數(shù)據(jù)的多傳感器集成方法,然而該方法僅提高了位置數(shù)據(jù)的精度,對(duì)速度和航向沒(méi)有影響。NOURELDIN等[5]提出一種神經(jīng)元小波算法來(lái)整合INS-GNSS的輸出數(shù)據(jù),并使用KF提供精確的定位數(shù)據(jù)。SHARAF等[6]研究了位置-位置誤差(結(jié)構(gòu)(輸入為INS位置,輸出為INS與GNSS的位置差),并提出一種徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)模型修正位置(無(wú)須處理速度和方位數(shù)據(jù)的誤差)。許哲萬(wàn)等[7]給出一種自適應(yīng)調(diào)整的神經(jīng)模糊推理結(jié)構(gòu),以幫助模塊進(jìn)行解算。何康輝等[8]介紹了用于INS-GNSS的動(dòng)態(tài)神經(jīng)網(wǎng)絡(luò),基于當(dāng)前和過(guò)去的一些INS速度和位置樣本,使用輸入延遲神經(jīng)網(wǎng)絡(luò)評(píng)估INS的速度和位置誤差。CAI等[9]通過(guò)反向傳播神經(jīng)網(wǎng)絡(luò)和遞歸神經(jīng)網(wǎng)絡(luò)組合INS與GNSS,采用了包括反向傳播、遺傳和粒子群優(yōu)化在內(nèi)的常用權(quán)重優(yōu)化算法。此外,為提高函數(shù)逼近精度,NOURMOHAMMADI等[10]設(shè)計(jì)了模糊小波神經(jīng)網(wǎng)絡(luò)(wavelet neural networks,WNN)。CHEN等[11]在模糊推理中利用遞歸WNN以反饋連接的形式提供動(dòng)態(tài)參數(shù)。
本文給出一種基于神經(jīng)網(wǎng)絡(luò)模型的補(bǔ)償INS的導(dǎo)航誤差框架,并通過(guò)應(yīng)用和速度-速度誤差()序列,在GNSS中斷期間修正速度和位置數(shù)據(jù),進(jìn)而建立一個(gè)神經(jīng)網(wǎng)絡(luò)輔助的INS-GNSS。由于神經(jīng)網(wǎng)絡(luò)類型的選擇對(duì)神經(jīng)網(wǎng)絡(luò)輔助INS-GNSS的定位精度有重要影響,本文提出一種遞歸模糊小波神經(jīng)網(wǎng)絡(luò)(recurrent fuzzy wavelet neural network,RFWNN)算法,研究神經(jīng)網(wǎng)絡(luò)算法的結(jié)構(gòu)及其對(duì)誤差補(bǔ)償?shù)挠绊懀⑶覍⒈疚乃惴ㄅc多層感知器(multilayer perceptron,MLP)、WNN和KF比較,給出估計(jì)精度。
1 RFWNN結(jié)構(gòu)
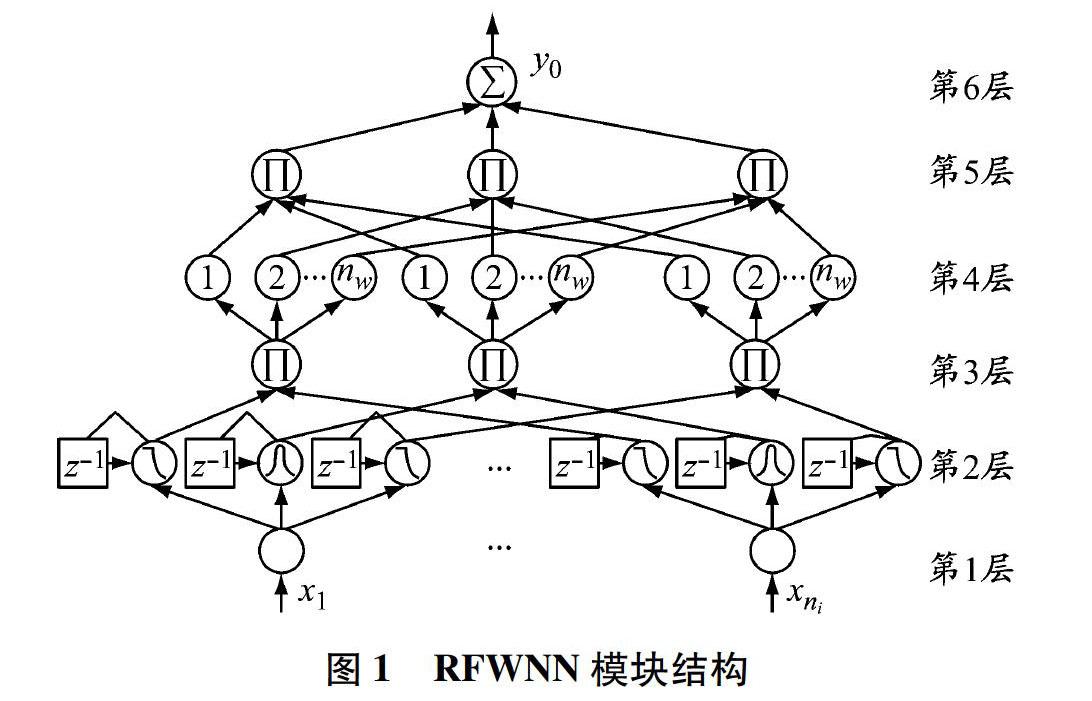
ANN已成為復(fù)雜非線性系統(tǒng)建模的一種有效方法,具有強(qiáng)大的計(jì)算能力、分類能力和函數(shù)逼近能力,適用于對(duì)無(wú)法用傳統(tǒng)算法求解的高度非線性系統(tǒng)和復(fù)雜系統(tǒng)進(jìn)行建模。如果神經(jīng)元數(shù)量和層數(shù)足夠多,ANN可以將廣泛的非線性函數(shù)逼近到任何期望的精度[12]。然而,選擇合適的ANN結(jié)構(gòu)以及確定神經(jīng)元參數(shù)對(duì)神經(jīng)網(wǎng)絡(luò)的應(yīng)用具有重要意義,尤其是在低成本的INS-GNSS中。本文設(shè)計(jì)了一種RFWNN模塊來(lái)解決GNSS中斷時(shí)的位置和速度分量的估計(jì)問(wèn)題。圖1給出了RFWNN模塊的6層結(jié)構(gòu),包括輸入層、隸屬度層、模糊規(guī)則層、小波層、小波乘積層和輸出層。
(1)第1層為輸入層。每個(gè)節(jié)點(diǎn)i直接向輸入層輸入信號(hào)xi(i=1,2,…,ni)。在輸入向量
x=(x1, x2,…, xni)T中,ni表示其維數(shù)。
(2)第2層為隸屬度層。這層中的神經(jīng)元表示模糊規(guī)則前部分所使用的語(yǔ)言變量的隸屬函數(shù)。
隸屬度層的輸入可以表示為
ri,j=xi,n+μi,j,n-1αi,j
式中:n為迭代次數(shù);αi,j為遞歸反饋連接的權(quán)重;μi,j,n-1為高斯隸屬函數(shù)。第2層的輸出信號(hào)為
Oj(ri,j)=(ri,j-mi,j)2(si,j)2,
i=1,2,…,ni; j=1,2,…,nj
式中:si,j和mi,j分別為高斯隸屬函數(shù)的標(biāo)準(zhǔn)差和均值;nj是每個(gè)輸入信號(hào)的語(yǔ)言變量數(shù)。網(wǎng)絡(luò)信息存儲(chǔ)于高斯隸屬函數(shù)中。
(3)第3層為模糊規(guī)則層。這層中每個(gè)由指定的神經(jīng)元k(本文中神經(jīng)元總數(shù)為3)都表示一個(gè)模糊與運(yùn)算,與來(lái)自第2層的輸入信號(hào)相乘:
pk=nii=1μi,k(Ok(ri,k)), k=1,2,3
式中:pk表示模糊規(guī)則層的第k個(gè)輸出。
(4)第4層為小波層。在小波層中,來(lái)自第3層的每個(gè)輸入信號(hào)pk通過(guò)nw個(gè)小波節(jié)點(diǎn)的激活函數(shù)傳遞。這些激活函數(shù)由墨西哥帽小波母函數(shù)
(x)給出。
(
x)=(1-
x2)exp(-
x2/2)
式中:
x2=
xT
x。因此,與第3層第k個(gè)輸入信息相連的第w(w=1,2,…,nw)個(gè)小波節(jié)點(diǎn)的激活函數(shù)如下:
dw,tw(pk)=2dk,w/2(1-2dk,wpk-tk,w2)·
exp(-2dk,wpk-tk,w2/2),w=1,2,…,nw
式中:dw和tw分別為第w個(gè)小波節(jié)點(diǎn)的伸縮和平移;dk,w和tk,w分別為與第k個(gè)輸入相連的第w個(gè)小波節(jié)點(diǎn)的伸縮和平移。
(5)第5層為小波乘積層。與第3層相似,
該層中每個(gè)由指定的神經(jīng)元都表示一個(gè)模糊與運(yùn)算,是第4層的輸入信號(hào)的乘積:
κp=npi=1dw,tw(pk)
本文中此層的規(guī)則數(shù)np=nw。
(6)第6層為輸出層。在輸出層中,每個(gè)標(biāo)量輸出為
y0=npp=1wp,0κp
式中:wp,0表示輸出與第p個(gè)規(guī)則之間的連接權(quán)重。
參數(shù)學(xué)習(xí)算法用于調(diào)整第4層的小波基參數(shù)、母小波的伸縮和平移以及輸出層的連接權(quán)重。該算法基于反向傳播技術(shù),目標(biāo)是利用梯度下降法使成本函數(shù)最小化。RFWNN輸出與參考值之間的差值根據(jù)以下成本函數(shù)進(jìn)行計(jì)算:
E=(y0-yd)2/2
(1)
式中:y0和yd分別為RFWNN輸出和期望輸出。第4層和第6層可調(diào)參數(shù)的更新律如下:
(1)基于以下步驟構(gòu)造第4層小波伸縮(dk,w)和平移(tk,w)的更新律:
dk,w,k+1=dk,w,k-ηdEdk,w
tk,w,k+1=tk,w,k-ηtEtk,w
式中:ηd和ηt分別表示小波伸縮和平移的學(xué)習(xí)率。
(2)基于式(1),第6層連接權(quán)重的更新方程如下:
wp,0,k+1=wp,0,k-ηwEwp,0
式中:ηw表示連接權(quán)重的學(xué)習(xí)率。
2 基于RFWNN的INS-GNSS
2.1 組合導(dǎo)航數(shù)學(xué)模型
慣性狀態(tài)動(dòng)力學(xué)位置誤差模型[13]為
δ=δ
vE(RN+γ)cos β
δ=δ
vNRM+γ
δ=δ
vD
速度誤差模型[13]為
δ
E=
2ωsin β+
vERN+γtan β
vN-
2ωcos β+
vERN+γ
vU+fN+fEδh-fDδl+BN
δ
N=-
2ωsin β+
vERN+γtan β
vE-
vNRM+γ
vU+fE+fNδh-fDδL+BE
δ
D=
2ωcos β+
vERN+γ
vE-
v2NRM+γ-g+fD+fEδL-fNδl+BD
姿態(tài)誤差模型[13]為
δL·=
ωsin β+
vERN+γtan β
l-
ωcos β+
vERN+γ
h+δ
vNRM+γ-
vNδγRM+γ+DN
δl·=-
ωsin β+
vERN+γtan β
L-
vNRM+γh-δ
vERN+γ-
vEδγ(RN+γ)2+ωδβsin β+DE
δh·=
ωcos β+
vERN+γ
L-
vNRM+γl-δ
vERN+γtan β+
vEδγtan β(RN+γ)2-(ωcos β+
vEsec2βRN+γ)δβ+DD
式中:RM和RN分別為子午圈曲率半徑和卯酉圈曲率半徑;ω為地球自轉(zhuǎn)角速度;g為重力加速度;
vN、vE和vU分別為在向北、向東和向上方向上的速度;fN、fE和fD分別為加速度計(jì)輸出在向北、向東和向下方向上的比力;BN、BE和BD分別為加速度計(jì)在向北、向東和向下方向上的偏差;DN、DE和DD分別為陀螺在向北、向東和向下方向上的常值漂移量。
陀螺常值漂移量和加速度計(jì)偏差的一階馬爾科夫模型分別為
D·i=-μDi+ρ
B·i=0 , i=N,E,D
式中:μ為傳感器測(cè)量的相關(guān)系數(shù);ρ為零均值高斯白噪聲。
慣性狀態(tài)動(dòng)力學(xué)誤差模型可以用以下?tīng)顟B(tài)空間形式[13]表示:
=f(
x,
ρ(t),t)
(2)
式中:f(·)為非線性連續(xù)函數(shù);
x為INS的誤差狀態(tài)向量,包括3個(gè)位置誤差、3個(gè)速度誤差、3個(gè)姿態(tài)誤差、3個(gè)加速度計(jì)偏差和3個(gè)陀螺常值漂移量;
ρ(t)包括加速度計(jì)和陀螺常值漂移的白噪聲。
狀態(tài)向量定義為
x=(δa,δβ,δγ,δ
vN,δ
vE,δ
vD,δL,δl,δh,BN,BE,BD,DN,DE,DD)
式(2)為非線性模型。為將該模型應(yīng)用于KF,需要對(duì)其進(jìn)行離散化處理[14]:
xk+1=
J(tk+1-tk)
xk+
ρk
(3)
式中:
J是狀態(tài)轉(zhuǎn)移矩陣;
ρk是與慣性傳感器相關(guān)的高斯白噪聲。同樣,量測(cè)方程的一般離散形式為
zk=
Hk
xk+
vk
式中:
Hk為觀測(cè)矩陣;
vk為零均值高斯測(cè)量噪聲,其協(xié)方差矩陣為
R。
zk通過(guò)從INS的位置、速度和航向角分別減去GNSS的位置、速度和航向角而實(shí)現(xiàn)更新。
Hk=
00000010000000000000001000000000000000100000000010000000000000001000000000000000100000000000-1000000000000
非線性模型式(2)作為神經(jīng)網(wǎng)絡(luò)的輸入,包括
PINS、
vINS和加速度計(jì)輸出(
fNED=(fN, fE, fD)T);線性模型式(3)的輸出作
為KF的輸入;KF用來(lái)估計(jì)位置誤差、速度誤差、姿態(tài)誤差、加速度計(jì)偏差和陀螺常值漂移量,然后修正組合系統(tǒng)的最終輸出。
2.2 RFWNN輔助的INS-GNSS實(shí)現(xiàn)
KF算法具有一些缺陷和局限性,如濾波估計(jì)值次優(yōu)甚至發(fā)散[15]。對(duì)于低成本INS-GNSS而言,在建立KF線性誤差模型時(shí)忽略了非線性誤差項(xiàng),導(dǎo)致定位誤差較大。因此,本文基于ANN思想實(shí)現(xiàn)INS-GNSS的非線性處理。最常用的方法是將INS的誤差與輸出相關(guān)聯(lián),預(yù)測(cè)INS與GNSS輸出的差值,而后將其作為KF的觀測(cè)向量。同樣,采用
PINS-δ
PINS和
vINS-δ
vINS結(jié)構(gòu),將所提出的RFWNN應(yīng)用于INS-GNSS。RFWNN輔助的INS-GNSS可以在GNSS中斷期間連續(xù)提供位置和速度誤差。將INS的位置、速度和加速度計(jì)輸出作為RFWNN的輸入,而相應(yīng)的INS的位置誤差和速度誤差作為RFWNN的輸出。圖2中:IMU指慣性測(cè)量單元(inertial measurement unit),包括陀螺儀和加速度計(jì);
AINS=(L, l, h)T為姿態(tài)向量;在RFWNN訓(xùn)練過(guò)程中,當(dāng)GNSS正常工作時(shí),INS和GNSS的輸出通過(guò)KF進(jìn)行組合。
如圖2所示,對(duì)于每個(gè)基于MEMS的INS-GNSS而言,如果使用增強(qiáng)KF,
PINS-δ
PINS和
vINS-δ
vINS結(jié)構(gòu)可以得到進(jìn)一步增強(qiáng),則可得到在GNSS中斷的情況下能提供INS誤差和精確定位信息的魯棒非線性模型。在GNSS可以接收到精確的導(dǎo)航數(shù)據(jù)時(shí),訓(xùn)練RFWNN將持續(xù)減小估計(jì)誤差,以獲得最優(yōu)的網(wǎng)絡(luò)因子。用神經(jīng)網(wǎng)絡(luò)可以更新突觸權(quán)值,從而恢復(fù)所獲得的導(dǎo)航知識(shí)。在網(wǎng)絡(luò)訓(xùn)練模式下,神經(jīng)網(wǎng)絡(luò)模塊輸出的INS位置誤差和速度誤差應(yīng)與參考值進(jìn)行比較。參考速度誤差δ
vINS-GNSS和位置誤差δ
PINS-GNSS定義為
δ
vINS-GNSS=
vINS-
vGNSS
δPINS-GNSS=
PINS-
PGNSS
RFWNN模塊輸出的速度誤差和位置誤差為RFWNN模塊的估計(jì)誤差。為減小這種誤差,訓(xùn)練RFWNN對(duì)其因子進(jìn)行修正,并根據(jù)最小二乘準(zhǔn)則實(shí)施更新,直到達(dá)到一定的均方誤差為止。對(duì)所有INS-GNSS信息進(jìn)行重復(fù)訓(xùn)練,直到確定GNSS中斷為止。圖3給出了GNSS中斷期間的RFWNN預(yù)測(cè)過(guò)程。當(dāng)GNSS發(fā)生故障時(shí),GNSS無(wú)法提供KF的觀測(cè)矢量,利用訓(xùn)練好的RFWNN代替GNSS進(jìn)行導(dǎo)航誤差預(yù)測(cè)。在預(yù)測(cè)模式中,INS的速度和位置信息以及fNED作為RFWNN的輸入,并將包括速度和位置誤差信息的神經(jīng)網(wǎng)絡(luò)輸出融合到KF中。
3 仿真結(jié)果與實(shí)驗(yàn)分析
3.1 仿真結(jié)果
使用實(shí)船試驗(yàn)來(lái)評(píng)估本文所提出的組合導(dǎo)航系統(tǒng)的性能。試驗(yàn)地點(diǎn)為大連港圓島附近水域,起始點(diǎn)為P1,終點(diǎn)為P2。INS-GNSS導(dǎo)航產(chǎn)生的軌跡見(jiàn)圖4。INS生成IMU的原始測(cè)量值,以及采樣頻率為50 Hz的船舶位置、速度和姿態(tài)數(shù)據(jù),GNSS更新頻率為1 Hz。參照基準(zhǔn)DGPS接收機(jī),使用實(shí)時(shí)動(dòng)態(tài)校正可給出高精度的數(shù)據(jù),采樣頻率為100 Hz,采樣時(shí)間共約1 400 s。在初始狀態(tài)下,INS-GNSS在初始對(duì)準(zhǔn)模式下工作200 s。為研究GNSS中斷對(duì)系統(tǒng)誤差的影響,以及檢驗(yàn)所提出RFWNN的導(dǎo)航誤差預(yù)測(cè)能力,人為進(jìn)行GNSS的中斷。
3.2 組合導(dǎo)航系統(tǒng)算法性能分析
在GNSS中斷期間,RFWNN模塊提供速度和位置誤差信息替代GNSS數(shù)據(jù)。4個(gè)可訪問(wèn)的神經(jīng)網(wǎng)絡(luò)模塊包括
P-δ
P結(jié)構(gòu)(用于估計(jì)位置(經(jīng)緯度))和v-δ
v結(jié)構(gòu)(用于估計(jì)向北的速度分量(vN)和向東的速度分量(vE))。每個(gè)神經(jīng)網(wǎng)絡(luò)模塊有4個(gè)輸入層神經(jīng)元(包括速度或位置分量中的1個(gè)以及3個(gè)加速度計(jì)比力)
和1個(gè)輸出層神經(jīng)元(用于提供速度誤差和位置誤差)。
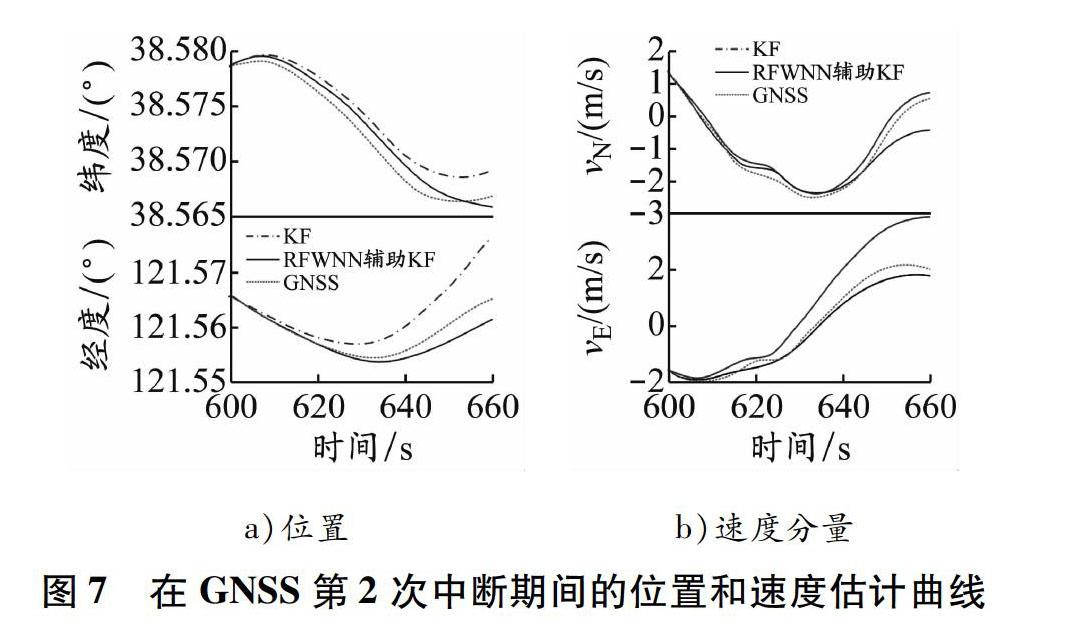
GNSS第1次中斷時(shí)間在300 s與360 s之間,船速為10 kn,船舶處于加速狀態(tài);GNSS第2次中斷時(shí)間在600 s與660 s之間,船速為12 kn,船舶處于定速狀態(tài)。在GNSS第1次中斷前,利用從INS和GNSS收集到的測(cè)試信息對(duì)RFWNN進(jìn)行訓(xùn)練;而后,利用訓(xùn)練好的RFWNN估計(jì)300 s到360 s期間的位置誤差和速度誤差。圖5顯示了在GNSS第1次中斷前,
P-δ
P模塊對(duì)船舶位置(經(jīng)緯度)的訓(xùn)練曲線,目標(biāo)均方誤差為0.000 01。由于
v-δ
v模塊的訓(xùn)練過(guò)程與
P-δ
P模塊的訓(xùn)練過(guò)程相似,這里只給出
P-δ
P模塊的訓(xùn)練曲線。
為驗(yàn)證該算法的適用性,比較在GNSS中斷期間RFWNN輔助的INS-GNSS、GNSS、傳統(tǒng)KF對(duì)位
置和速度分量的估計(jì)結(jié)果。應(yīng)注意的是,在GNSS中斷期間,來(lái)自GNSS的位置、速度和航向角數(shù)據(jù)不可靠,因此沒(méi)有KF的觀測(cè)矢量。圖6和7給出了在GNSS中斷期間的位置和速度估計(jì)曲線,展示了提出的RFWNN輔助KF算法在位置和速度估計(jì)方面的良好性能。結(jié)果表明,在GNSS信號(hào)中斷的情況下,INS誤差可以被有效補(bǔ)償,主要原因是基于神經(jīng)網(wǎng)絡(luò)的導(dǎo)航系統(tǒng)可以根據(jù)測(cè)試航路的訓(xùn)練周期捕獲智能信息來(lái)減少定位誤差。
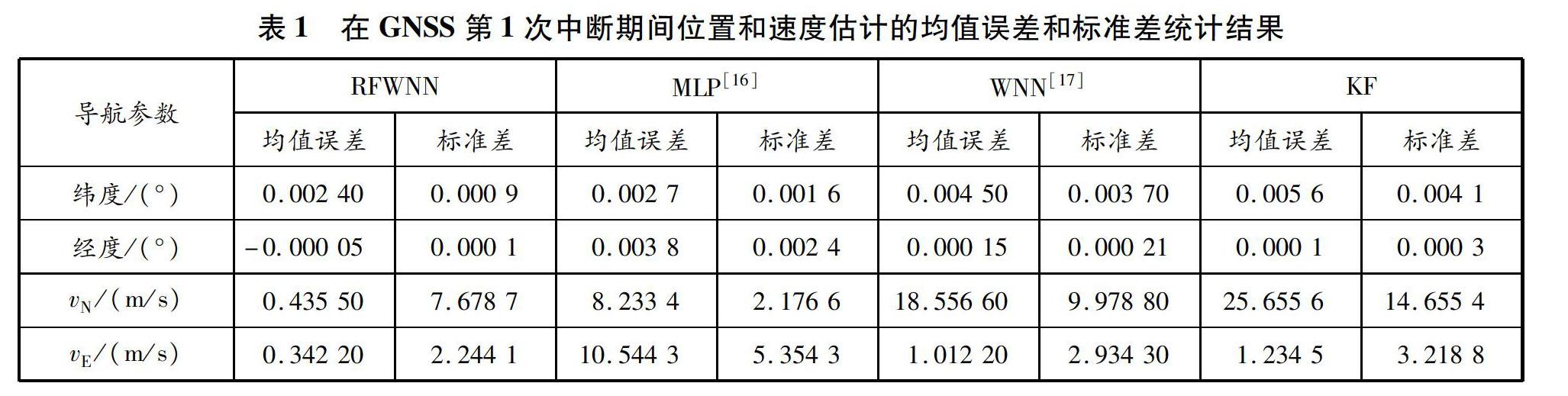
為驗(yàn)證所提出的RFWNN的有效性,將其與傳統(tǒng)的MLP、WNN的性能進(jìn)行比較。MLP由2個(gè)隱藏層和1個(gè)四層WNN組成。MLP和WNN的輸入和輸出與RFWNN相同,并以一個(gè)四維向量
作為輸入,映射到隱藏層,最后輸出一維向量。為更
好地進(jìn)行估計(jì),表1和2給出了GNSS兩次中斷期間基于同一組試驗(yàn)數(shù)據(jù)的位置和速度估計(jì)的均值誤差和標(biāo)準(zhǔn)差的統(tǒng)計(jì)結(jié)果。由表1和2可知,與MLP、WNN和KF相比,RFWNN的位置和速度估計(jì)的均值誤差和標(biāo)準(zhǔn)差明顯較低。
4 結(jié) 論
基于人工神經(jīng)網(wǎng)絡(luò)技術(shù),提出遞歸模糊小波神經(jīng)網(wǎng)絡(luò)(RFWNN)輔助的慣性導(dǎo)航系統(tǒng)(INS)與全球衛(wèi)星導(dǎo)航系統(tǒng)(GNSS)相結(jié)合的組合導(dǎo)航系統(tǒng)(INS-GNSS),通過(guò)實(shí)船試驗(yàn)對(duì)該導(dǎo)航系統(tǒng)的性能進(jìn)行了評(píng)估。該導(dǎo)航系統(tǒng)利用GNSS的位置和速度來(lái)輔助INS,在GNSS正常工作時(shí),利用
位置、速度及它們的誤差結(jié)果輔助INS;在GNSS中斷時(shí),利用RFWNN減少INS-GNSS的速度和位置誤差累積。當(dāng)GNSS正常工作時(shí),用INS的速度、位置、比力和GNSS數(shù)據(jù)等訓(xùn)練RFWNN;在GNSS中斷期間,訓(xùn)練的RFWNN將提供精確的位置和速度誤差值作為卡爾曼濾波(KF)的觀測(cè)值,從而減小INS估計(jì)誤差。試驗(yàn)表明,與多層感知器(MLP)、小波神經(jīng)網(wǎng)絡(luò)(WNN)和KF相比,RFWNN輔助的INS-GNSS在GNSS中斷期間給出的速度和位置預(yù)測(cè)誤差顯
著較低。
參考文獻(xiàn):
[1]段順利, 孫偉, 吳增林. 抗差自適應(yīng)EKF在INS/GNSS緊組合中的應(yīng)用[J]. 電子科技大學(xué)學(xué)報(bào), 2019, 48(2): 58-62. DOI: 10.3969/j.issn.1001-0548.2019.02.009.
[2]ZHANG Chuang, GUO Chen, ZHANG Daheng. Ship navigation via GPS/IMU/LOG integration using adaptive fission particle filter[J]. Ocean Engineering, 2018, 156: 435-445. DOI: 10.1016/j.oceaneng.2018.03.012.
[3]ISMAIL M, ABDELKAWY E. A hybrid error modeling for MEMS IMU in integrated GPS/INS navigation system[J]. The Journal of Global Positioning Systems, 2018, 16(1): 1-12. DOI: 10.1186/s41 445-018-0016-5.
[4]CHIANG K W, NOURELDIN A, EI-SHEIMY N. Multisensor integration using neuron computing for land-vehicle navigation[J]. GPS Solutions, 2003, 6(4): 209-218. DOI: 10.1007/s10 291-002-0024-4.
[5]NOURELDIN A, OSMAN A, EL-SHEIMY N. A neuro-wavelet method for multi-sensor system integration for vehicular navigation[J]. Measurement Science and Technology, 2004, 51(4): 259-268. DOI: 10.1088/0957-0233/15/2/013.
[6]SHARAF R, NOURELDIN A, OSMAN A, et al. Online INS/GNSS integration with a radial basis function neural network[J]. IEEE Aerospace & Electronic Systems Magazine, 2005, 20(3): 8-14. DOI: 10.1109/MAES.2005.1412121.
[7]許哲萬(wàn), 李晶皎, 王愛(ài)俠, 等. 一種基于改進(jìn)T-S模糊推理的模糊神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)算法[J]. 計(jì)算機(jī)科學(xué), 2011(11): 196-199. DOI: 10.3969/j.issn.1002-137X.2011.11.044.
[8]何康輝, 董朝陽(yáng), 王青. 一種考慮GPS信號(hào)中斷的導(dǎo)航濾波算法[J]. 北京航空航天大學(xué)學(xué)報(bào), 2019, 45(9): 1874-1881. DOI: 10.13700/j.bh.1001-5965.2018.0786.
[9]CAI X, HSU H, CHAI H, et al. Multi-antenna GNSS and INS integrated position and attitude determination without base station for land vehicles[J]. The Journal of Navigation, 2019, 72(2): 342-358. DOI: 10.1017/S037 3463318000681.
[10]NOURMOHAMMADI H, KEIGHBADI J. Fuzzy adaptive integration scheme for low-cost SINS/GPS navigation system[J]. Mechanical Systems and Signal Processing, 2018, 99(15): 434-449. DOI: 10.1016/j.ymssp.2017.06.030.
[11]CHEN S, HUNG Y, HUNG Y, et al. Application of a recurrent wavelet fuzzy-neural network in the positioning control of a magnetic-bearing mechanism[J]. Computer Electrical Engineering, 2016, 54: 147-158. DOI: 10.1016/j.compeleceng.2015.11.022.
[12]CHENG Shou, LI Liang, CHEN Jie. Fusion algorithm design based on adaptive SCKF and integral correction for side-slip angle observation[J]. IEEE Transactions on Industrial Electronics, 2018, 65: 5754-5763. DOI: 10.1109/TIE.2017.2774771.
[13]胡建宇, 侯書銘. UKF在INS/GPS組合導(dǎo)航直接法濾波中的應(yīng)用[J]. 計(jì)算機(jī)與數(shù)字工程, 2015, 43(2): 252-255. DOI: 10.3969/j.issn1672-9722.2015.02.023.
[14]QUINCHIA A, FALCO G, FALLETTI E, et al. A comparison between different error modelling of MEMS applied to GPS/INS integrated systems[J]. Sensors, 2013, 13: 9549-9588. DOI: 10.3390/s130809549.
[15]LI Jing, SONG Ningfang, YANG Gongliu, et al. Improving positioning accuracy of vehicular navigation system during GPS outages utilizing ensemble learning algorithm[J]. Information Fusion, 2017, 35: 1-10. DOI: 10.1016/j.inffus.2016.08.001.
[16]MAJID M, MOJTABA K, RUPP C, et al. Power production prediction of wind turbines using fusion of MLP and ANFIS networks[J]. IET Renewable Power Generation, 2018, 12(9): 1025-1033. DOI: 10.1049/iet-rpg.2017.0736.
[17]殷禮勝, 唐圣期, 李勝, 等. 基于整合移動(dòng)平均自回歸和遺傳粒子群優(yōu)化小波神經(jīng)網(wǎng)絡(luò)組合模型的交通流預(yù)測(cè)[J]. 電子與信息學(xué)報(bào), 2019, 41(9): 2273-2279. DOI: 10.11999/JEIT181073.
(編輯 賈裙平)
