基于改進(jìn)蝙蝠算法優(yōu)化廣義回歸神經(jīng)網(wǎng)絡(luò)的巖質(zhì)邊坡穩(wěn)定性預(yù)測
2021-08-11 06:46:10楊雅萍張文蓮孫曉云
科學(xué)技術(shù)與工程 2021年20期
楊雅萍, 張文蓮, 孫曉云
(石家莊鐵道大學(xué)電氣與電子工程學(xué)院, 石家莊 050043)
巖土工程中,邊坡穩(wěn)定性預(yù)測是一個(gè)重要的領(lǐng)域。邊坡是一個(gè)動(dòng)態(tài)開放和非線性的復(fù)雜系統(tǒng),目前研究表明邊坡滑動(dòng)的誘發(fā)因子之間具有不確定性、離散性、隨機(jī)性以及相互之間復(fù)雜的關(guān)聯(lián)作用[1]。在邊坡穩(wěn)定性確定性分析法中,極限平衡法和傳統(tǒng)的數(shù)值分析方法無法準(zhǔn)確描述邊坡的非線性特征。近年來人工神經(jīng)網(wǎng)絡(luò)的發(fā)展,及其非線性動(dòng)態(tài)處理的優(yōu)勢,神經(jīng)網(wǎng)絡(luò)也被逐漸應(yīng)用到邊坡工程實(shí)際中來預(yù)測邊坡穩(wěn)定性。李龍等[2]在傳統(tǒng)反向傳播(back propagation,BP)神經(jīng)網(wǎng)絡(luò)中引入附加動(dòng)量、自適應(yīng)學(xué)習(xí)速率和模擬退火算法,提出了改進(jìn)的BP神經(jīng)網(wǎng)絡(luò),對(duì)網(wǎng)絡(luò)收斂速度慢和易陷入局部最小值的問題有較好的改進(jìn)等。牛鵬飛等[3]引入核主成分算法(principal component analysis,KPCA)和Levenberg-Marquardt(L-M)算法建立了主成分分析(principal components analysis, PCA)-LMBP邊坡穩(wěn)定性網(wǎng)絡(luò)預(yù)測模型。臧焜巖等[4]在傳統(tǒng)BP神經(jīng)網(wǎng)絡(luò)中引入遺傳算法(genetic algorithm,GA),用來更新網(wǎng)絡(luò)的權(quán)值和閾值,建立了GA-BP邊坡穩(wěn)定性預(yù)測模型。
以上3種神經(jīng)網(wǎng)絡(luò)模型輸入均采用Mohr-coulomb(M-C)準(zhǔn)則中的內(nèi)聚力、內(nèi)摩擦角等巖土力學(xué)參數(shù)。雖然目前大多數(shù)學(xué)者均采用M-C準(zhǔn)則中的力學(xué)參數(shù),但M-C準(zhǔn)則無法解釋巖質(zhì)邊坡的非線性變形破壞現(xiàn)象。改進(jìn)Hoek-Brown(H-B)準(zhǔn)則對(duì)巖體固有的非線性破壞特點(diǎn)可以很好地反映,而且該準(zhǔn)則已在巖體強(qiáng)度預(yù)測及計(jì)算領(lǐng)域得到廣泛應(yīng)用[5]。目前,BP神經(jīng)網(wǎng)絡(luò)隱含層神經(jīng)單元數(shù)目在實(shí)際應(yīng)用中不存在一個(gè)合理的解析式,仍是以經(jīng)驗(yàn)公式確定,而BP神經(jīng)網(wǎng)絡(luò)在工程應(yīng)用成敗的關(guān)鍵是其網(wǎng)絡(luò)的構(gòu)造[6]。對(duì)于網(wǎng)絡(luò)的構(gòu)造,廣義回歸神經(jīng)網(wǎng)絡(luò)(generalized regression neural network,GRNN)網(wǎng)絡(luò)結(jié)構(gòu)與輸入樣本維數(shù)和數(shù)量有關(guān),網(wǎng)絡(luò)結(jié)構(gòu)無需根據(jù)經(jīng)驗(yàn)設(shè)定。
針對(duì)上述兩個(gè)問題,提出了一種邊坡穩(wěn)定性預(yù)測新方法,即基于廣義H-B準(zhǔn)則的巖體力學(xué)參數(shù),采用交叉變異優(yōu)化的蝙蝠算法,構(gòu)建了改進(jìn)的BA-GRNN神經(jīng)網(wǎng)絡(luò)模型,對(duì)邊坡的穩(wěn)定性和安全性進(jìn)行預(yù)測。
1 算法原理
1.1 廣義Hoek-Brown準(zhǔn)則
在統(tǒng)計(jì)分析大量巖體原位試驗(yàn)成果后,得到了反映巖體產(chǎn)生破壞的半經(jīng)驗(yàn)準(zhǔn)則Hoek-Brown強(qiáng)度準(zhǔn)則,該準(zhǔn)則主要反映了巖體最大和最小主應(yīng)力的關(guān)系[7],可表示為

(1)
式(1)中:σ1、σ3分別為最大、最小主應(yīng)力;σci為完整巖石材料單軸抗壓強(qiáng)度;mb、s、a為反映巖體特征的經(jīng)驗(yàn)參數(shù),可以由巖體地質(zhì)強(qiáng)指標(biāo)、巖體的擾動(dòng)因子和完整巖石經(jīng)驗(yàn)常數(shù)計(jì)算確定。
1.2 廣義回歸神經(jīng)網(wǎng)絡(luò)
廣義回歸神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)以徑向基神經(jīng)網(wǎng)絡(luò)為基礎(chǔ),具有很強(qiáng)的非線性映射能力和學(xué)習(xí)速度[8]。
GRNN網(wǎng)絡(luò)結(jié)構(gòu)有4層,其中輸入變量由輸入層直接傳遞給模式層,傳遞函數(shù)為

(2)
式(2)中:X=[x1,x2,…,xn]為輸入學(xué)習(xí)樣本;Xi為訓(xùn)練樣本;pi為指數(shù)分子為學(xué)習(xí)樣本X與訓(xùn)練樣本的Xi的歐氏距離平方和;徑向基函數(shù)為高斯函數(shù),σ為高斯函數(shù)標(biāo)準(zhǔn)差,隱含層位置中基函數(shù)的形狀由σ決定。
輸出層輸出樣本為Y=[y1,y2,…,yn],輸出層神經(jīng)元輸出為

(3)
式(3)中:Pi為每個(gè)模式層神經(jīng)元的輸出;SNj、SD分別為求和層來兩類神經(jīng)元的求和結(jié)果;yij為Yi的第j個(gè)元素。
由式(1)可知,σ為GRNN網(wǎng)絡(luò)需要優(yōu)化的唯一參數(shù),σ的取值會(huì)影響網(wǎng)絡(luò)預(yù)測結(jié)果,合理的σ取值,可以增強(qiáng)GRNN網(wǎng)絡(luò)的泛化性,σ的較大取值,使得網(wǎng)絡(luò)預(yù)測值與所有樣本因變量的均值近似相等,預(yù)測效果不好;反之當(dāng)σ取值趨于0,預(yù)測值則會(huì)更加準(zhǔn)確[8]。
GRNN具有柔性網(wǎng)絡(luò)結(jié)構(gòu)、高度容錯(cuò)性及魯棒性[9],針對(duì)樣本少和部分樣本數(shù)據(jù)精準(zhǔn)度比較差的問題,能得到較好的預(yù)測效果。
1.3 蝙蝠算法
蝙蝠算法類似于粒子群算法,不同的是蝙蝠算法增加了頻率和響度因素,通過頻率變化影響蝙蝠速度,從而改變蝙蝠位置對(duì)蝙蝠個(gè)體進(jìn)行尋優(yōu)。目前蝙蝠算法已成為搜索全局最優(yōu)解的有效方法[10]。算法具體闡述如下:隨機(jī)初始化虛擬蝙蝠的飛行速度vi、位置xi,脈沖頻率fi、脈沖響度Ai和脈沖率r,蝙蝠發(fā)現(xiàn)獵物時(shí),改變頻率、減小響度和增加脈沖發(fā)射率來更新蝙蝠個(gè)體速度和位置,通過適應(yīng)度函數(shù)評(píng)價(jià)當(dāng)前個(gè)體位置的優(yōu)劣,對(duì)個(gè)體進(jìn)行優(yōu)勝劣汰,選擇最優(yōu)解。
對(duì)進(jìn)化過程中蝙蝠種群t時(shí)刻的搜索脈沖頻率fi、速度vi和位置xi進(jìn)行更新,分別表示為
fi=fmin+(fmax-fmin)β
(4)

(5)

(6)
式中:β∈[0,1]為均勻分布的隨機(jī)數(shù);X*為當(dāng)前所有蝙蝠的最優(yōu)解;蝙蝠的初始搜索脈沖頻率fi在[fmin,fmax]內(nèi)隨機(jī)確定。
對(duì)t時(shí)刻脈沖音量Ai和脈沖發(fā)射率ri進(jìn)行更新,可表示為
(7)

(8)
式中:搜索脈沖頻率范圍為[fmin,fmax];音量的衰減系數(shù)數(shù)為α;最大脈沖音量為A0;最大脈沖率r0;搜索頻率的增強(qiáng)系數(shù)為γ。
合理的音量衰減系數(shù)和搜索頻率可以有效平衡算法尋優(yōu)精度和收斂速度,在算法仿真中需要不斷調(diào)整音量衰減系數(shù)和搜索頻率。與其他粒子群算法相比,模型簡單,參數(shù)較少,收斂速度快已成為蝙蝠算法的突出優(yōu)點(diǎn)。
在算法尋優(yōu)過程中,由于蝙蝠種群個(gè)體缺乏變異機(jī)制,超級(jí)蝙蝠對(duì)種群中其他蝙蝠的吸引會(huì)使得種群多樣性顯著下降[11]。采用交叉變異算子來豐富蝙蝠種群的多樣性。
2 建立改進(jìn)BA-GRNN網(wǎng)絡(luò)模型
2.1 輸入輸出變量的確定
研究影響邊坡穩(wěn)定性的因素分為邊坡巖土力學(xué)參數(shù)和邊坡幾何形態(tài)兩方面。對(duì)于巖土力學(xué)參數(shù)的影響,基于廣義Hoek-Brown經(jīng)驗(yàn)準(zhǔn)則[12-17],采用巖體重度rG、地質(zhì)強(qiáng)度指標(biāo)GSI、擾動(dòng)因子D、單軸抗壓強(qiáng)度σci、巖體軟硬程度參數(shù)mi表征,對(duì)于邊坡幾何形態(tài)的影響,采用坡高H,坡角αs表征,將以上7個(gè)因素作為BA-GRNN網(wǎng)絡(luò)模型的輸入,輸出為邊坡安全系數(shù)和邊坡狀態(tài)[18-23]。搜集120個(gè)經(jīng)典實(shí)例作為邊坡樣本[24-28],最后10個(gè)作為預(yù)測樣本。對(duì)于網(wǎng)絡(luò)不同的輸入?yún)?shù),其數(shù)值上相差很大,訓(xùn)練前對(duì)輸入數(shù)據(jù)進(jìn)行歸一化處理可以提升網(wǎng)絡(luò)收斂速度,最后對(duì)預(yù)測結(jié)果網(wǎng)絡(luò)輸出安全系數(shù)和邊坡狀態(tài)進(jìn)行反歸一化處理,得到與實(shí)際值相同量綱的值。
2.2 改進(jìn)BA-GRNN模型建立
采用廣義H-B準(zhǔn)則中的巖體力學(xué)參數(shù),采用交叉變異算子改進(jìn)的BA算法優(yōu)化的GRNN神經(jīng)網(wǎng)絡(luò)的光滑因子,建立改進(jìn)BA-GRNN網(wǎng)絡(luò),對(duì)邊坡的穩(wěn)定性和安全性進(jìn)行預(yù)測,改進(jìn)后網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)如圖1所示。

圖1 BA-GRNN網(wǎng)絡(luò)拓?fù)鋱D
輸入層的7個(gè)神經(jīng)元分別對(duì)應(yīng)于2.1節(jié)中的7個(gè)影響因素,模式層神經(jīng)元數(shù)目對(duì)應(yīng)于2.1節(jié)中的110組訓(xùn)練樣本。在增加蝙蝠種群多樣性方面,分別采用最常用和最基本的單點(diǎn)交叉算子和基本位變異算子來優(yōu)化蝙蝠算法。單點(diǎn)交叉(one-point crossover)算子是指在個(gè)體兩兩配對(duì)的父代染色體編碼串中隨機(jī)設(shè)置交叉點(diǎn)A,然后在A處相互交換兩個(gè)父代的Ⅱ段染色體,交叉運(yùn)算過程如圖2所示。
由圖2知,相互配對(duì)的父代染色體每一次交叉運(yùn)算產(chǎn)生數(shù)量相同的子代染色體,而且根據(jù)交叉點(diǎn)選取的不同,兩個(gè)子代染色體來自兩個(gè)父代染色體基因座長度不同。

圖2 交叉算子示意圖
基本位變異(simple mutation)算子是對(duì)個(gè)體編碼基因座上的每一位隨機(jī)生成[0,1]內(nèi)的隨機(jī)數(shù)r′,依變異概率pm與r′的大小,判斷該位是否進(jìn)行變異運(yùn)算,對(duì)判斷pm>r′的基因座上的基因值作為變異運(yùn)算。變異過程如圖3所示。

圖3 變異算子示意圖
改進(jìn)BA-GRNN神經(jīng)網(wǎng)絡(luò)算法基本實(shí)現(xiàn)步驟如下。
步驟1學(xué)習(xí)樣本和預(yù)測樣本數(shù)據(jù)歸一化,輸入到改進(jìn)后的網(wǎng)絡(luò)。
步驟2用二分法確定光滑因子初始取值范圍[a,b]。
步驟3初始化蝙蝠算法參數(shù)A0、r0、α、γ和最大迭代次數(shù)Nmax;[a,b]內(nèi)初始化蝙蝠種群;初始化交叉概率pc和變異概率pm。
步驟4計(jì)算初始化種群適應(yīng)度,記錄初始最優(yōu)解適應(yīng)度函數(shù)值fmin和其位置I,將位置I下的蝙蝠個(gè)體值賦給Best。
步驟5選擇新群體進(jìn)行兩兩配對(duì),根據(jù)交叉概率pc在相互配對(duì)的個(gè)體交叉點(diǎn)A點(diǎn)處相互交換父代個(gè)體的部分染色體,產(chǎn)生與父代數(shù)量相同的子代染色體。
步驟6對(duì)個(gè)體的每個(gè)基因座,根據(jù)變異概率pm對(duì)判斷為變異位的基因值做取反運(yùn)算,如原基因值為0的取為1,反之原基因值為0的取為1,以此產(chǎn)生新的子代個(gè)體。
步驟7按式(3)~式(5)更新上述產(chǎn)生的個(gè)體的位置和速度。
步驟8若生成的均勻分布隨機(jī)數(shù)Rrand>r′,則給當(dāng)前最優(yōu)解一個(gè)隨機(jī)擾動(dòng),并在擾動(dòng)后對(duì)新解進(jìn)行越界處理,即對(duì)于超出給定范圍的值將其限制在邊界值上。
步驟9若生成均勻分布隨機(jī)Rrand>Ai,且適應(yīng)度函數(shù)f(xi)>f(x*),則接受式(8)產(chǎn)生的解, 然后按式(6)、式(7)更新種群的響度和脈沖發(fā)射率。
步驟10計(jì)算所有蝙蝠個(gè)體的適應(yīng)度值并對(duì)其進(jìn)行排序,找到的適應(yīng)度值最小值對(duì)應(yīng)的個(gè)體即為當(dāng)前最優(yōu)解,同時(shí)記錄最優(yōu)解對(duì)應(yīng)的位置。
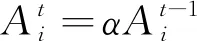
步驟11若上一步中產(chǎn)生的局部最優(yōu)解適應(yīng)度Fnew 步驟12重復(fù)步驟(4)~步驟(8)直至滿足設(shè)定條件,本文采用達(dá)到最大迭代次數(shù)作為算法結(jié)束的標(biāo)志。 步驟13輸出全局最優(yōu)解Best和最優(yōu)解位置。 步驟14上一步輸出的最優(yōu)解即為GRNN網(wǎng)絡(luò)的光滑因子,將10組預(yù)測樣本輸入到優(yōu)化好的網(wǎng)絡(luò),即可輸出預(yù)測結(jié)果。 改進(jìn)BA-GRNN網(wǎng)絡(luò)算法流程圖如圖4所示。 圖4 改進(jìn)BA-GRNN網(wǎng)絡(luò)算法流程圖 基于MATLAB2020平臺(tái),網(wǎng)絡(luò)對(duì)所選110組樣本進(jìn)行訓(xùn)練后,在迭代300次后能得到較好預(yù)測結(jié)果。改進(jìn)BA算法的初始化參數(shù)取值如表1所示。蝙蝠算法最優(yōu)個(gè)體值為0.178,最優(yōu)個(gè)體適應(yīng)度函數(shù)值為1.207 4×10-3。圖5為適應(yīng)度函數(shù)值的變化曲線。 終止代數(shù)=300 表1 改進(jìn)BA算法初始參數(shù) GRNN網(wǎng)絡(luò)光滑因子σ取值為0.178。為了進(jìn)一步分析改進(jìn)后BA-GRNN網(wǎng)絡(luò)的預(yù)測效果,與BA-GRNN神經(jīng)網(wǎng)絡(luò)和K-交叉驗(yàn)證選取GRNN光滑因子網(wǎng)絡(luò)(Kfold-GRNN)兩種模型預(yù)測結(jié)果進(jìn)行比較,表2對(duì)比了3種網(wǎng)絡(luò)預(yù)測結(jié)果。 由表2可知,3種網(wǎng)絡(luò)對(duì)邊坡狀態(tài)預(yù)測結(jié)果完全相同。由圖6可以看出,對(duì)于邊坡安全系數(shù)的預(yù)測,改進(jìn)后的BA-GRNN網(wǎng)絡(luò)模型對(duì)安全系數(shù)真實(shí)值的擬合效果更好。由3種網(wǎng)絡(luò)邊坡安全系數(shù)預(yù)測值得平均絕對(duì)百分比誤差(mean absolute percentage error,MAPE)和均方誤差(mean square error,MSE),如表3所示,進(jìn)一步得到改進(jìn)后的BA-GRNN網(wǎng)絡(luò)MAPE和MSE均小于前兩種網(wǎng)絡(luò)。由上述知,改進(jìn)BA-GRNN網(wǎng)絡(luò)對(duì)邊坡穩(wěn)定性的預(yù)測效果較好。 表2 3種網(wǎng)絡(luò)模型預(yù)測結(jié)果對(duì)比 圖6 安全系數(shù)對(duì)比 表3 3種網(wǎng)絡(luò)模型預(yù)測結(jié)果及誤差對(duì)比 選用經(jīng)典邊坡算例,該邊坡為天然均質(zhì)邊坡,邊坡巖體強(qiáng)度參數(shù)及幾何參數(shù)如表4所示。將邊坡算例在FLAC3D中進(jìn)行建模,模型只考慮重力作用,底部邊界為固定約束,水平約束施加于兩側(cè)邊界,坡面設(shè)為自由邊界[29-31],由此所建模型如圖7所示。 表4 邊坡巖體強(qiáng)度參數(shù)及幾何參數(shù) 針對(duì)圖7模型,利用FLAC3D中model factor-of-safety命令計(jì)算邊坡安全系數(shù),得安全系數(shù)為1.15,通過邊坡計(jì)臨界破壞狀態(tài)的最大剪應(yīng)變?cè)茍D可得邊坡臨界破壞面,如圖8所示。 圖7 邊坡有限元模型 圖8 邊坡臨界破壞最大剪應(yīng)變?cè)茍D 通過本文網(wǎng)絡(luò)對(duì)經(jīng)典算例計(jì)算,得到安全系數(shù)和邊坡狀態(tài)的值為1.158 0和1.000 0,通過與FLAC3D的計(jì)算結(jié)果進(jìn)行對(duì)比,可得本文方法與FLAC3D建模計(jì)算結(jié)果相近,網(wǎng)絡(luò)預(yù)測安全系數(shù)MAPE為0.70%。可見對(duì)于實(shí)際邊坡案例,改進(jìn)后的BA-GRNN網(wǎng)絡(luò)對(duì)安全系數(shù)和狀態(tài)的預(yù)測是準(zhǔn)確的。 (1)結(jié)合廣義Hoek-Brown準(zhǔn)則,將Hoek-Brown準(zhǔn)則所涉及的巖體參數(shù)作為穩(wěn)定性影響因素,對(duì)巖質(zhì)邊坡進(jìn)行穩(wěn)定性預(yù)測。分析結(jié)果顯示,所選擇影響因素對(duì)巖質(zhì)邊坡有更好的適用性。 (2)利用改進(jìn)的BA算法優(yōu)化的GRNN網(wǎng)絡(luò)對(duì)邊坡的安全系數(shù)和狀態(tài)進(jìn)行預(yù)測,通過與BA-GRNN和Kfold-GRNN神經(jīng)網(wǎng)絡(luò)邊坡預(yù)測模型對(duì)比,改進(jìn)BA-GRNN網(wǎng)絡(luò)安全系數(shù)的平均絕對(duì)百分比誤差在8%以下,均方誤差只有0.17%,而且對(duì)實(shí)際邊坡的安全系數(shù)和是否失穩(wěn)可以進(jìn)行準(zhǔn)確的判斷。 (3)在邊坡穩(wěn)定性的確定分析中,傳統(tǒng)的數(shù)值分析法不僅計(jì)算煩瑣,計(jì)算量大,時(shí)間長,而且對(duì)經(jīng)驗(yàn)的依賴性較強(qiáng),所使用的方法可以很好地解決這些問題。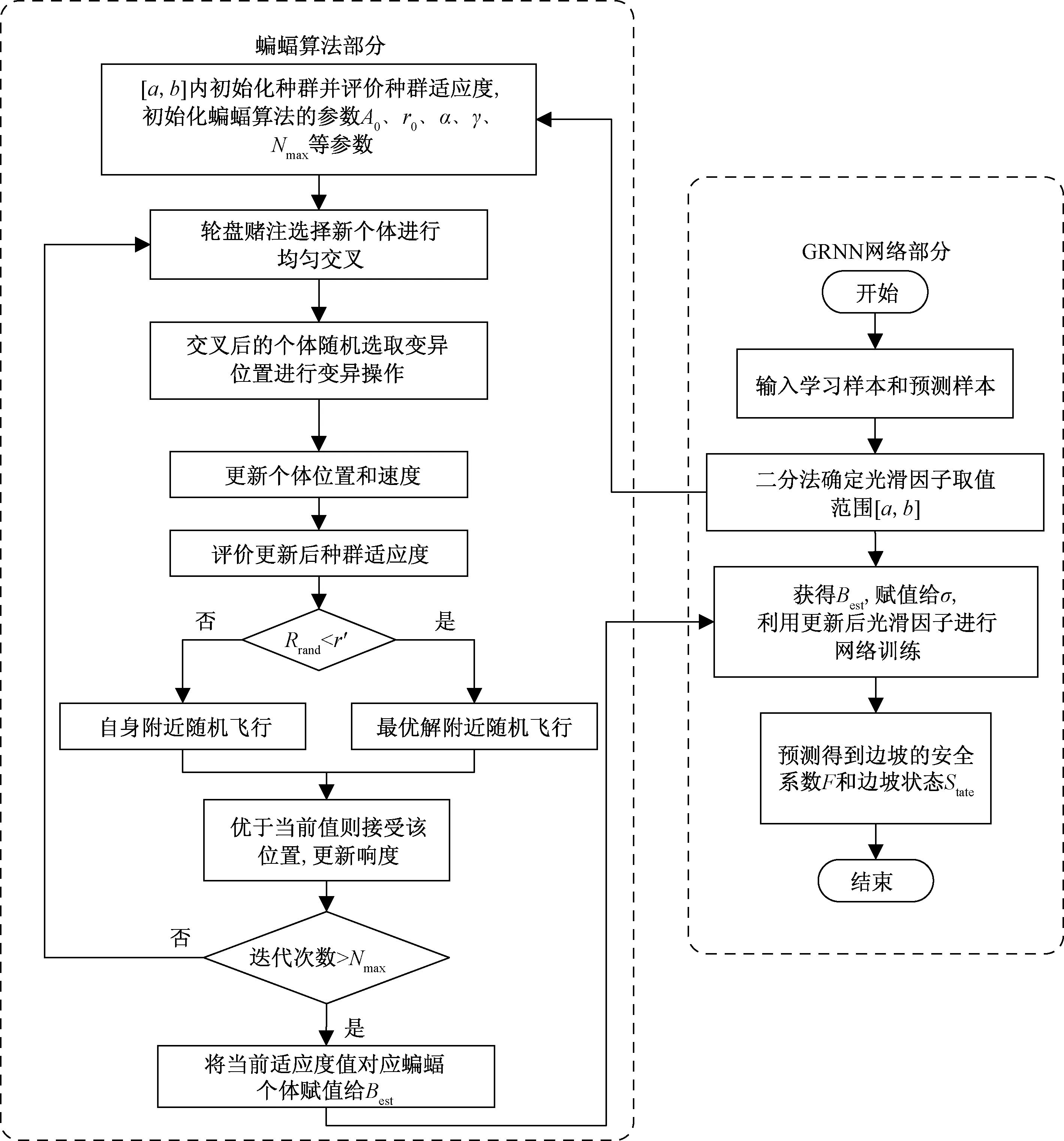
3 實(shí)例分析與結(jié)果對(duì)比


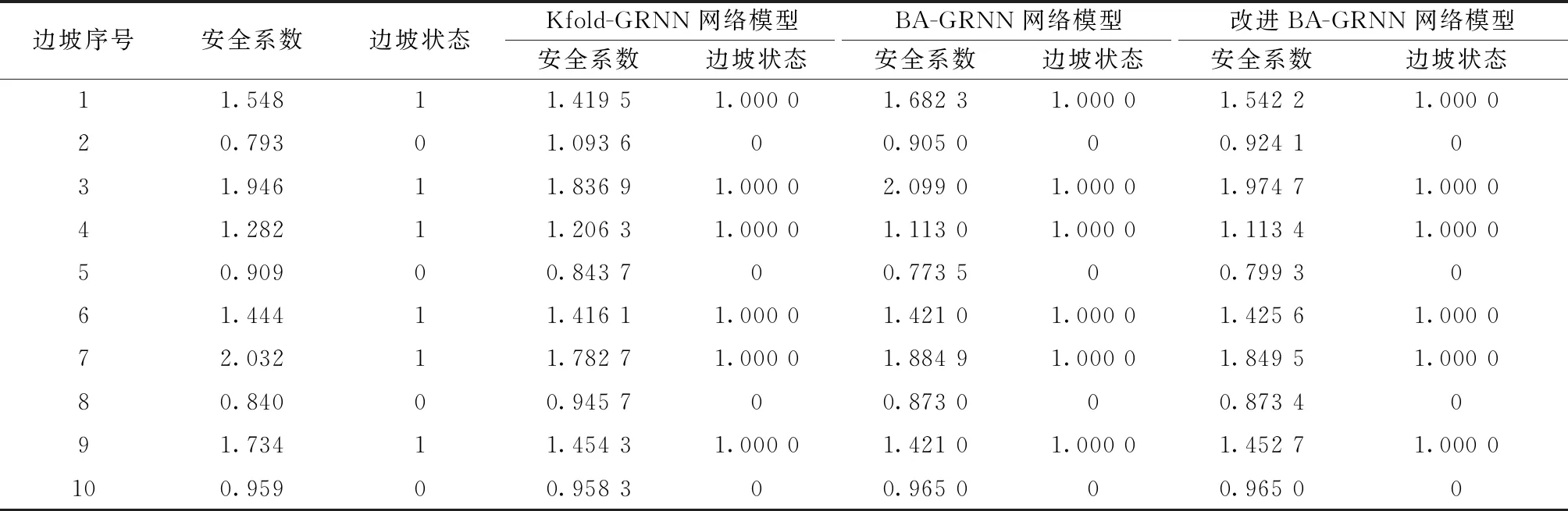


4 算例驗(yàn)證


5 結(jié)論
