水下懸浮隧道張力腿的時滯減振控制研究
2021-08-11 11:56:32童俊輝孫洪鑫
振動與沖擊 2021年15期
童俊輝,彭 劍,2,符 翔,孫洪鑫,2
(1.湖南科技大學 土木工程學院,湖南 湘潭 411201;2.湖南科技大學 結構抗風與振動控制湖南省重點實驗室,湖南 湘潭 411201)
懸浮隧道(submerged floating tunnel,SFT),又稱Archimeders橋[1],是一種跨越長水道和深海峽潛在的交通結構物,主要依靠自身結構的浮力和支持系統保證其在固定位置,較傳統隧道和橋梁有其特有的優勢,具有廣泛應用前景。但由于海洋環境復雜,懸浮隧道的振動和穩定性問題亟需解決。近年來,水下懸浮隧道及懸浮隧道張力腿引起學者大量關注。為了解決懸浮隧道在水流作用下的動力響應問題,項貽強等[2]對管體和錨索系統的參數振動和渦激振動進行了研究,結果表明,管體的初始擾動對錨索瞬態振幅有很大影響;易壯鵬等[3]對張力腿懸浮隧道的動力學模型和自振特性進行了研究;閆宏生等[4]研究了海流作用下懸浮隧道纜索的運動響應;孫勝男等[5-6]對錨索-隧道耦合非線性參數振動進行了研究,并對不同參數激勵下隧道張力腿的振動進行了分析;李焱等[7]研究了畸形波作用下張力腿平臺的動力響應,考慮張力腿平臺的六自由度運動與張力腿非線性恢復剛度,建立非線性耦合運動方程;常爽等[8]通過波浪聚焦和波列疊加模型模擬生成了畸形波,結果表明畸形波和二階波浪力會引起張力腿平臺縱蕩和垂蕩的大幅運動;劉宇等[9]研究了錨索傾角對不同截面懸浮隧道運動響應影響;黃磊等[10]總結并分析了近些年水中懸浮隧道的研究進展。
此外,為了抑制張力腿的大幅振動,振動控制研究顯得尤為重要。主動控制在土木工程結構的抗風、抗振和自適應修復等問題上有了大量的研究和應用,提高了結構穩定及性能[11]。但在主動控制系統中,時滯問題是不可避免的,其中包括本身自有的時滯以及外部引入的時滯。胡海巖等[12]從時滯動力學系統的特點、研究方法、動力學等問題出發,對時滯動力學研究進展作了綜述;Masoud等[13-15]研究了結構振動的時滯輸出反饋控制器設計,并利用時滯狀態反饋控制起重機的振動問題,有很好的控制效果;陳龍祥等[16]研究了時滯對系統穩定性的影響,指出主動控制系統的時滯存在可利用的價值;Peng等[17]對壓電彈性梁非線性共振響應的時滯反饋振動控制進行了研究;Sandip等[18]對時滯非線性反饋振蕩器的參數激勵和Hopf分岔進行了分析。
水下懸浮隧道是一種未來的新型交通結構,目前懸浮隧道的預想設計有浮筒式、墩柱式以及錨索(張力腿)式,其中張力腿式根據張力腿的傾斜角度不同,分為垂直式、傾斜式和混合式等。本文采用時滯減振技術對垂直式張力腿懸浮隧道進行振動控制研究,將隧道管體假設成質量點,根據Euler-Bernoulli梁理論和時滯反饋控制策略,考慮高階非線性影響,建立了張力腿的參激振動模型,將隧道管體的豎向和橫向運動簡化成簡諧運動,并著重分析張力腿的運動特性及時滯減振效果。通過實際算例,調整不同的控制增益和時滯量,驗證了時滯反饋控制對張力腿振動的抑制效果,為未來水下懸浮隧道的實際應用及穩定控制提供參考意見。
1 數學模型
圖1是基于張力腿豎直錨定的水下懸浮隧道示意圖及其力學簡圖,考慮軸向和橫向耦合,將張力腿簡化成一根下端固定鉸支,上端可移動鉸支的非線性梁模型。

(a)水下懸浮隧道示意圖
由于大長徑比,忽略轉動慣量和彎曲剛度的影響,并考慮材料的阻尼,根據Hamilton變分原理,得到張力腿振動控制方程[19]:
(1)
fy+Fcδ(x-xd)
(2)
式中:“·”為對時間t求導,“′”為對坐標x求導;ρ為材料的密度;A為橫截面面積;c為線性阻尼系數;E為材料彈性模量;I為張力腿橫截面的慣性矩;u和v分別為軸向和橫向的位移;Fc為控制力;δ是Dirac delta函數;xd表示控制點的位置。
邊界條件為:
(3)
式中:Ua(t)、Va(t)分別為隧道管體豎向和橫向運動形式,為便于理論分析,本文將張力型懸浮隧道管體的豎向和橫向振動簡化為簡諧振動,并將豎向和橫向諧振的位移記為[20]:
(4)
式中:fx和fy分別為軸向和橫向單位長度的分布力,fx為單位長度的浮力與重力的差值:
fx=ρfAg-ρAg
(5)
fy為張力腿橫向運動所引起的流體阻尼力,根據Morison方程進行計算[21]:
(6)
式中:ρf為海水密度;A為張力腿的橫截面積;g為重力加速度;D為張力腿直徑;Ca、Cd分別為附加質量系數和黏性力系數;UL0、VL0分別為隧道管體垂蕩和縱蕩的幅值;ωa為其振動的圓頻率。
因為張力腿長徑比較大,忽略方程(1)~(2)中轉動慣量的影響,考慮上端隧道管體的橫向和豎向振動,以及預張力所引起的變形,運用Galerkin法,將軸向位移和橫向位移的時間變量和空間變量分離,將其表示為振動函數和振型函數的乘積疊加,即:
(7)
(8)


(9)

(10)

由于張力腿的橫向波速遠小于其縱向波速,故假設張力腿以擬靜態方式進行軸向變形[22],忽略方程式(9)中的慣性力、外激勵則有:
(11)
將方程式(11)代入方程式(10),有:
(12)
本文采用速度時滯反饋策略,記為如下形式:
(13)

(14)
其中:
μn=2ωnξ,


2 線性穩定性分析
本節研究了系統線性穩定性,并得到了系統穩定性圖,以此為依據,得到系統的穩定域,為第3節的實例分析中參數的選取提供指導意義。
將方程(14)線性化,并令f=0,可得:
(15)
式中:ωn為張力腿固有頻率,方程(15)的解形式如下:
qvn=Ane(ξn+iλn)t
(16)
式中:An是振幅;ξn是阻尼系數;λn為響應頻率,將方程(16)代入方程(15),分離實虛部,并令其分別等于零,得到:
sin(2πλnγ)+2ξnλncos(2πλnγ)]=0
(17)
cos(2πξnγ)-2ξnλnsin(2πξnγ)]=0
(18)
式中:γ=τ/2π,通過分析發現,系統的線性穩定性由阻尼系數ξn決定,當ξn>0時,系統是穩定的,而當ξn<0時,系統不穩定,因此為了得到線性穩定性邊界條件,令ξn=0,求解方程(17)~(18),得到:
通過方程(19)~(20),得到穩定性區域(見圖2)。如圖2所示,在(τ,k1)平面內,隨著τ的增大,穩定性范圍逐漸減小;當確定時滯τ為某一值時,系統的穩定隨著k1的變化而發生改變,即由穩定變為不穩定或者由不穩定變為穩定。因此,可以通過調節時滯和增益來改變系統的穩定性。
圖2 系統穩定性圖(n=1,μ1=0.008 8)
3 數值分析與討論
本節以某擬建懸浮隧道參數進行算例分析,結構基本參數見表1[23]。其中,增益值和時滯量根據圖2系統的穩定性圖,選取了穩定域中的幾個參數,進行比較分析。
表1 張力腿基本參數
不考慮海流及波浪力對張力腿的作用,通過激勵隧道管體間接施加給張力腿,隧道管體的振動頻率ωa等于張力腿的第一階振動頻率ω1。圖3為張力腿橫向前三階模態位移響應圖,圖4為張力腿在不同的時間點沿高度變化各點的橫向位移變形圖。從圖中可以看出,張力腿橫向運動呈周期性,一階模態峰值約為0.75 m,且振動響應以第一階模態為主,取前三階基本滿足計算結果的精度要求。

圖3 張力腿橫向前三階模態響應
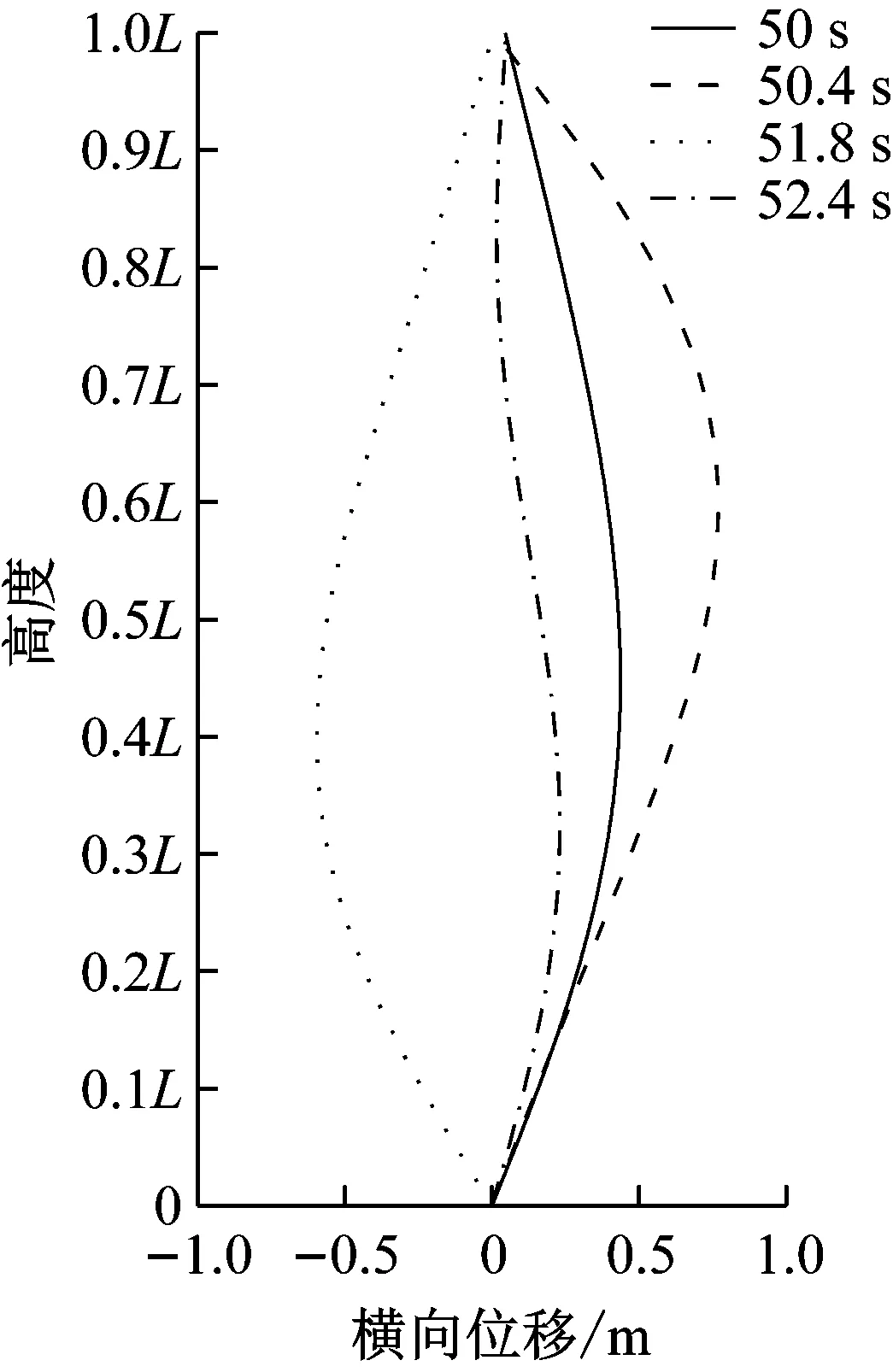
圖4 張力腿橫向位移變形圖

圖第一階模態響應時程曲線和相圖

圖第一階模態響應時程曲線和相圖

圖第一階模態響應時程曲線和相圖
圖第一階模態響應時程曲線和相圖
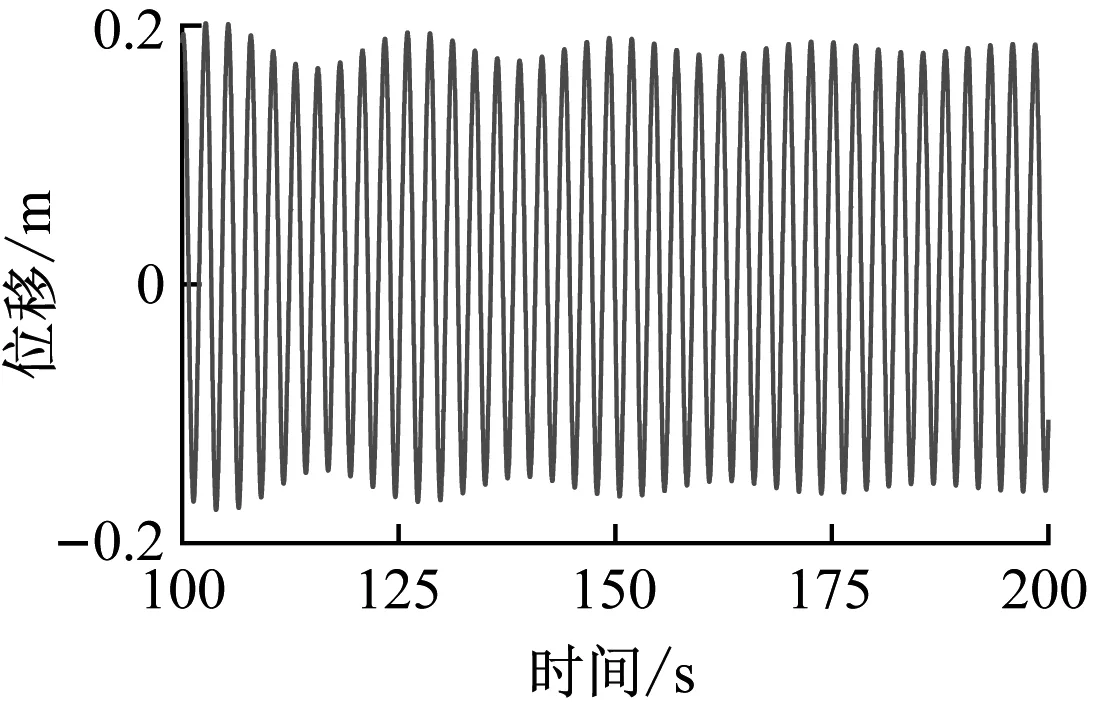
圖9為當τ=0.1,xd=L/2時,不同增益下結構的第一階模態響應時程曲線,如圖所示,當時滯量τ為一確定值時,在穩定域內,隨著增益量k1值越大,響應幅值越小,故對于某一確定時滯值,通過調節不同的控制增益,可以有效的抑制張力腿的大幅振動越小。圖10為當時滯值和增益量固定時,在張力腿的高度分別為L/6、L/4、L/2、5L/8處施加控制力時結構的第一階模態響應時程曲線,從圖可得出,在張力腿中間位置施加控制力時振動抑制效果最好。

圖9 τ=0.1時不同控制增益下結構的時程曲線

圖時在不同位置施加控制下結構的時程曲線
4 結 論
本文將隧道管體假設成質量點,采用Euler-Be-rnoulli梁理論,分析了時滯速度反饋控制對水下懸浮隧道張力腿的大幅橫向振動控制的影響。結果表明,時滯反饋控制能大幅降低張力腿的橫向大幅振動,提高結構穩定性,減少其疲勞損壞。并且通過確定穩定域,調節時滯值和增益量為合適值,將控制設置在張力腿中間位置,能使減振效果達到最佳,最高抑制效果可達90%以上;但若時滯和增益量選取不合適,不但達不到控制效果,反而加劇張力腿的振動,并可能出現混沌運動。然而理論模型與實際工程有一定的差距,以后的工作將進一步結合并改進懸浮隧道張力腿設計模型,同時開展相關試驗研究,最終將該減振技術在懸浮隧道張力腿中將其實現。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
天天愛科學(2020年6期)2020-09-10 07:22:44
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
數學物理學報(2017年6期)2018-01-22 02:26:40
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44