整流側換流母線電壓恢復導致逆變器換相失敗的機理分析
2021-08-12 07:04:18馬星李鳳婷尹純亞解超
電力工程技術 2021年4期
馬星, 李鳳婷, 尹純亞, 解超
(可再生能源發電與并網技術教育部工程研究中心(新疆大學),新疆維吾爾自治區 烏魯木齊 830047)
0 引言
我國能源中心與負荷中心相距較遠,具有大容量、遠距離輸電優勢的高壓直流輸電系統得到廣泛應用[1]。由于結構復雜,仍存在較多的問題。換相失敗是其主要故障之一,成為近期研究的熱點[2—3]。
目前針對換相失敗的研究大多基于逆變側交直交互關系展開[4—7]。文獻[8]分析了逆變側交流系統不對稱故障引發直流系統連續換相失敗的機理,指出故障后實際越前觸發角具有周期性波動的特征,極易在系統恢復階段引發連續換相失敗。文獻[9]基于實際案例,分析了導致多饋入直流系統同時換相失敗的影響因素,并給出了優化措施。文獻[10]針對受端交流系統兩相故障,分析了過渡電阻和故障時刻對換相電壓的影響,并提出了臨界電壓降的計算方法。文獻[11]針對多饋入直流系統,將采用臨界多饋入交互作用因子判斷換相失敗的方法進一步推廣到了受端交流系統任意母線。上述研究都基于逆變側交流系統故障展開,而未考慮整流側換流母線電壓變化對逆變器換相的影響。文獻[12]針對多饋出直流系統,推導了關斷角與換流母線電壓的關系式,指出整流側換流母線電壓升高可能導致逆變器換相失敗,但其未考慮直流控制系統的影響。文獻[13]推導了整流側換流母線電壓不同程度跌落時的關斷角表達式,指出電壓恢復會引起直流電流增大導致逆變器關斷角減小,嚴重時會發生換相失敗,并提出了有效的改善方法,但其并未深入研究控制器在電壓恢復過程中的控制特性,所提方法也不夠完善。
鑒于此,文中以CIGRE HVDC標準測試系統為例,研究整流側換流母線電壓恢復導致逆變器換相失敗機理。基于直流系統控制原理分析整流側換流母線電壓恢復過程中控制系統的動作特性,探尋誘發換相失敗的原因并提出有效的抑制措施。該方法通過在PSCAD/EMTDC電磁暫態仿真軟件中仿真驗證。
1 換相失敗的影響因素
換相結束時,退出導通的閥在反向電壓作用期間內未能完全關斷,或在反向電壓作用期間換相過程未能結束,致使本應關斷的閥在正向電壓作用下重新導通,這一現象稱為換相失敗[14]。當關斷角γ小于臨界關斷角γmin時,可認為換相失敗[2]。考慮換相期間直流電流變化量的關斷角表達式為[15]:
(1)
式中:ULI,TI,XCI,β分別為逆變側換流母線電壓、換流變壓器變比、換相電抗和越前觸發角;N為6脈動換流器的個數;Id為直流電流;ΔId為換相期間直流電流變化量。
由式(1)可知,γ與多種影響因素有關,這些因素可以劃分為電氣量(ULI,Id等)和控制量(β等)兩類。目前針對換相失敗的研究大多基于逆變側交流故障展開,當故障發生時,電氣量變化較控制量更快[16],ULI的跌落及Id的增大共同導致γ減小。但其忽略了整流側換流母線電壓ULR的變化,Id增大的實質是由直流線路兩端電壓差引起,ULR升高引起Id增大同樣會導致γ減小。
2 電壓恢復影響關斷角的機理
2.1 電壓跌落時控制系統的響應
CIGRE HVDC標準測試模型的整流側控制方式有定最小觸發角αmin控制和定電流(constant current,CC)控制,逆變側有CC控制、定關斷角(cons tant extinction angle,CEA)控制、電流偏差控制(cur rent error controller,CEC)以及低壓限流控制(vol ta ge-dependent current order limiter,VDCOL)[17—18]。系統運行過程中,CEA及CC控制器取其中輸出較大者投入;直流電流指令值由VDCOL或主控制級提供,取其中最小值;當直流電流的實測值小于指令值時,CEC啟動,電流偏差量乘一個固定系數后作為CEC的輸出。
根據ULR跌落程度的不同,整流及逆變器所采用的控制方式見表1[19]。
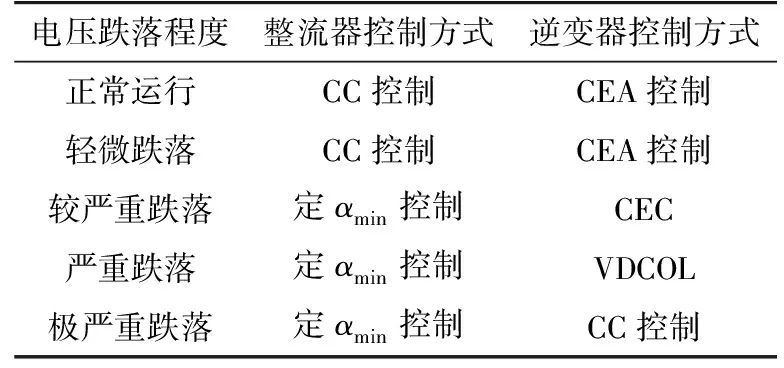
表1 CIGRE HVDC標準測試模型控制方式Table 1 Control mode of CIGRE HVDC benchmark model
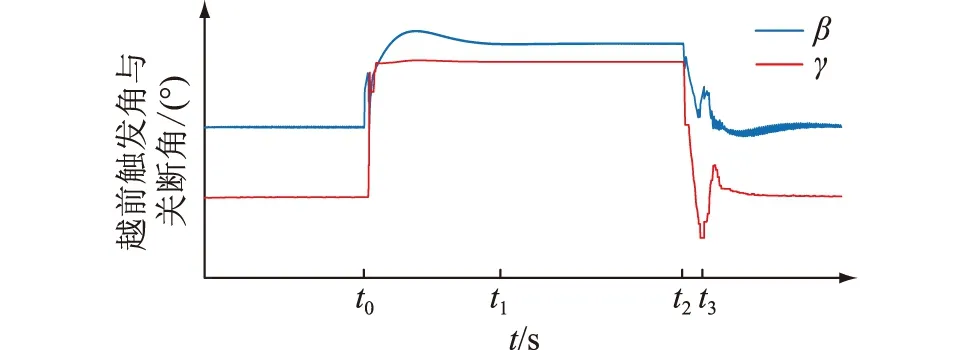
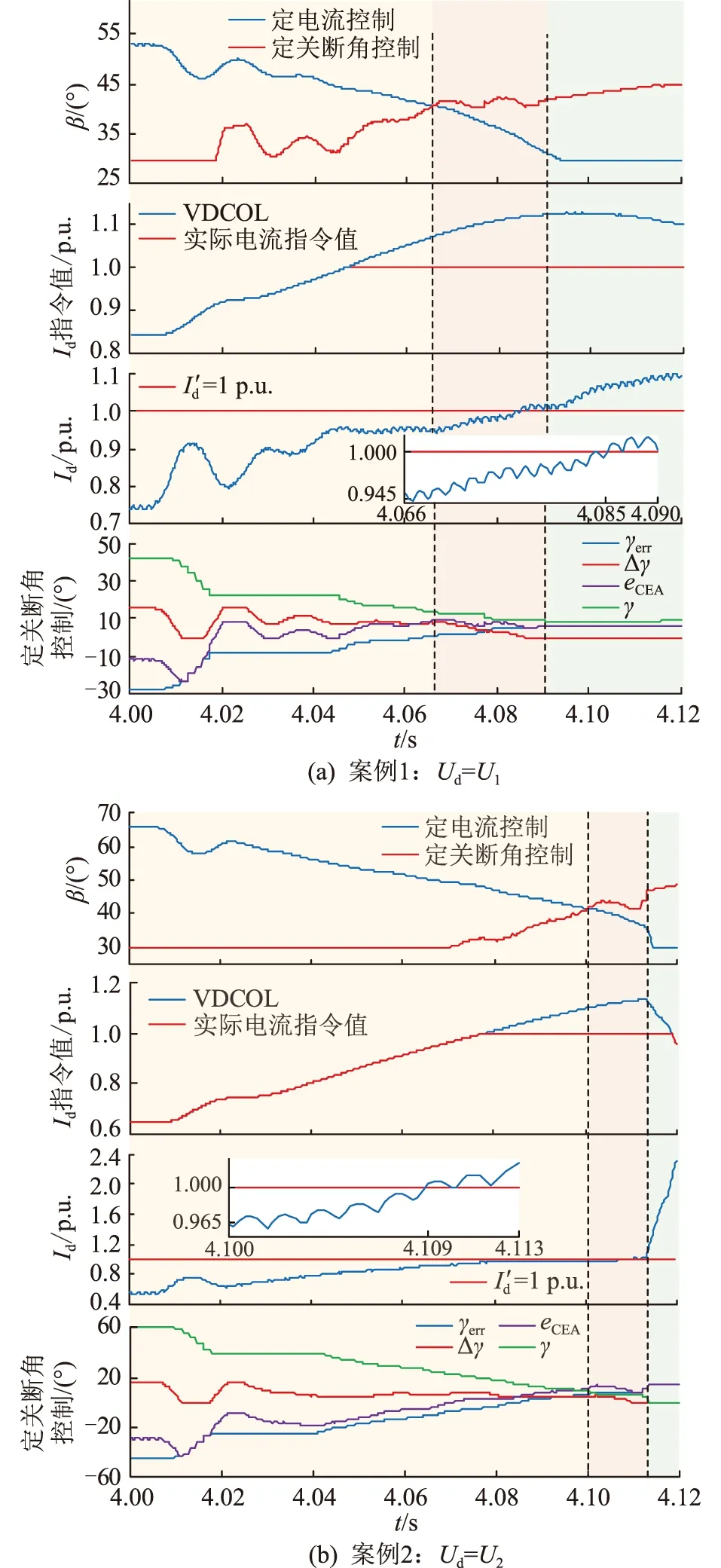
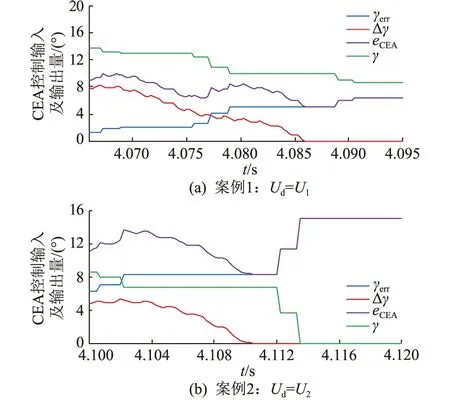
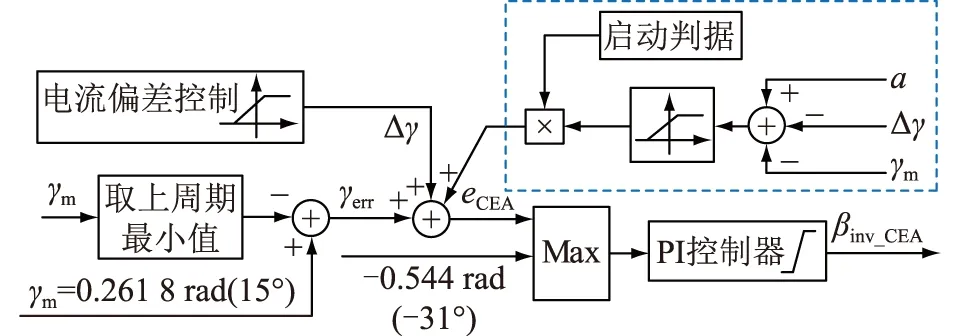
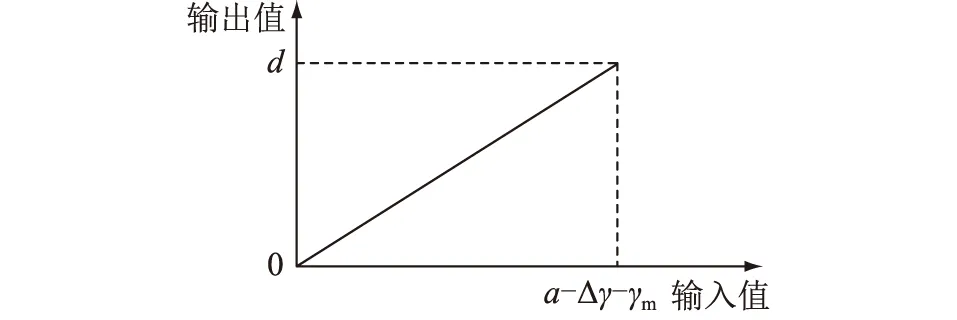
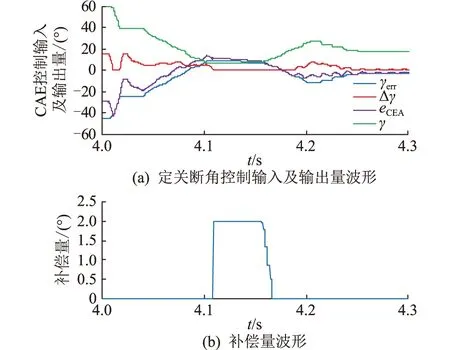
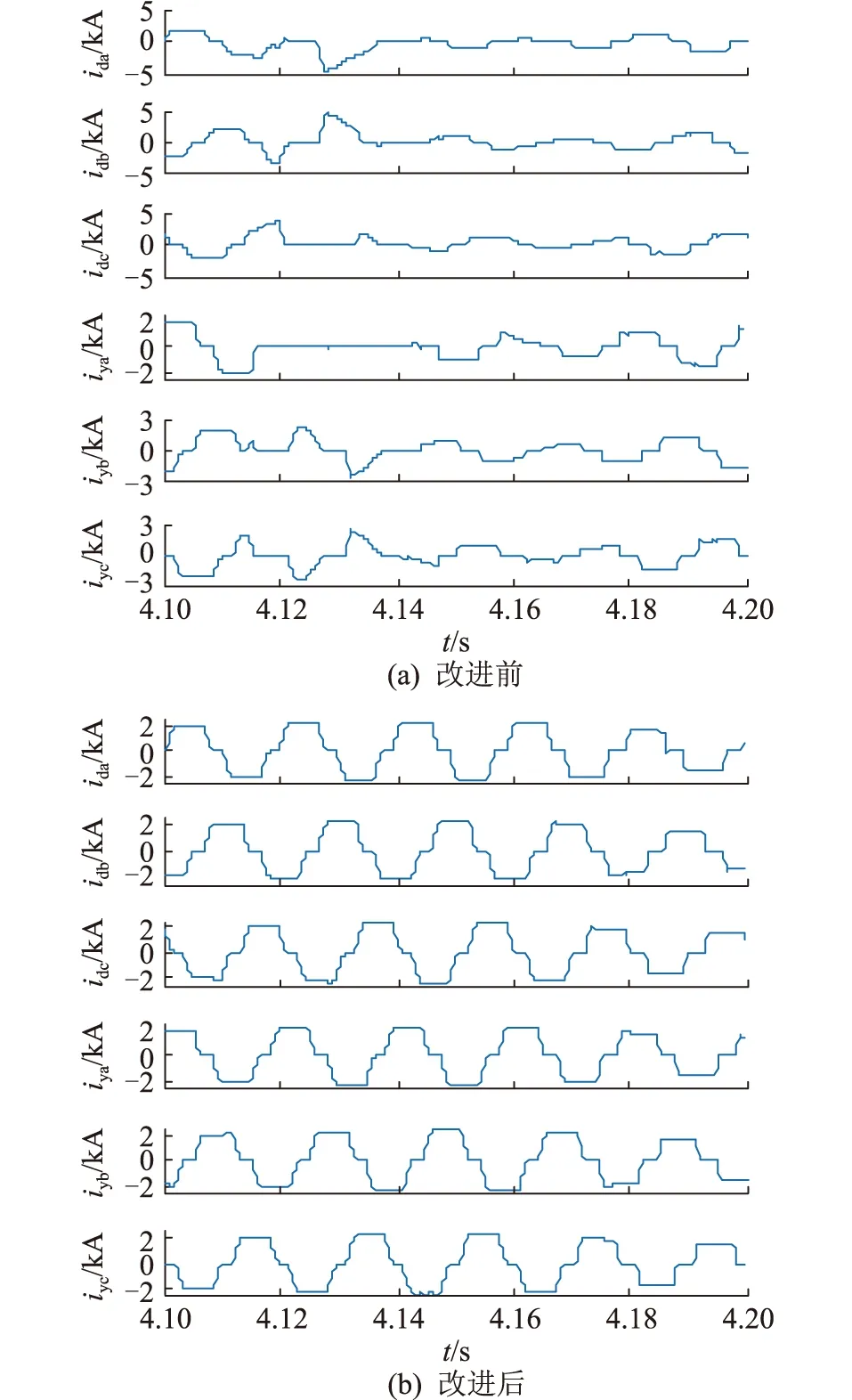
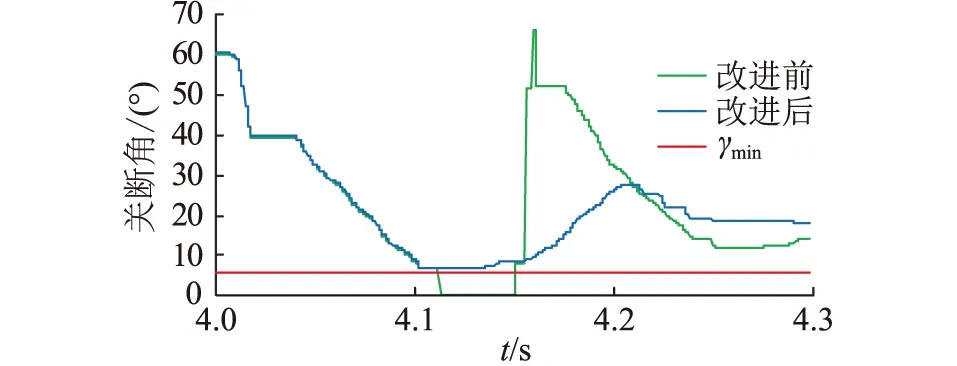
當ULR嚴重跌落后,整流側定αmin控制,逆變側VDCOL投入,此時直流電壓Ud越小,電壓恢復時逆變器越易發生換相失敗[13]。因此,取Ud=U1(未發生換相失敗)及Ud=U2(發生換相失敗)2點分析ULR恢復時直流系統電氣量及控制量的變化特性,其中U2 ULR跌落及恢復時,β與γ波形如圖1所示。可知,β與γ因ULR在t=t0時刻的跌落而增大,在t1時刻達其穩態值,之后又因ULR在t=t2時刻的恢復而減小,γ在t3時刻達其最小值。在t2至t3時間段內,γ隨β減小。在電壓恢復初期,γ-γmin較大,換相裕度較大。但在電壓恢復后期,隨著γ逐漸減小直至達到其最小值,γ-γmin較小,換相裕度較小,結合式(1)可知,若此時Id及ΔId過大,換相所受影響較電壓恢復初期更大。 圖1 越前觸發角與關斷角波形Fig.1 Waveforms of the leading firing angle and extinction angle 當ULR恢復時,各電氣量及控制量波形見圖2。 圖2 電壓恢復時電氣量及控制量波形Fig.2 Waveforms of electric quantity and control quantity during voltage recovery 圖2中,ULR于t=4 s開始恢復,以逆變側控制方式發生切換及γ達其最小值為節點將ULR恢復過程分為3個部分:Δγ為CEC輸出;γerr為實測關斷角偏差;eCEA為其二者之和。 由圖2可知:案例1中,電壓恢復時,逆變側CC控制輸出不斷降低,控制方式于t=4.066 s由CC控制切換為CEA控制,此時Id指令值由主控級提供為1 p.u.,且Id=0.945 p.u.,于t=4.085 s達到1 p.u.;案例2中,逆變側控制方式于t=4.1 s由CC控制切換為CEA控制,此時Id指令值由主控級提供為1 p.u.,且Id=0.965 p.u.,于t=4.109 s達到1 p.u.。值得注意的是,逆變側控制方式發生切換后,案例2中γ達其最小值所用時間較案例1中更短,CEA控制輸入及輸出量波形如圖3所示。 圖3 定關斷角控制輸入及輸出量波形Fig.3 Input and output waveforms of constant extinction angle control 案例1中:逆變側控制方式切換為CEA控制時,γerr=1°,Δγ=8°,eCEA=9°,γ=14°。隨后Δγ在t=4.086 s減小為零,歷經0.02 s。 案例2中:逆變側控制方式切換為CEA控制時,γerr=6°,Δγ=5°,eCEA=11°,γ=9°。隨后Δγ在t=4.11 s減小為零,歷經0.01 s。 由圖3可知,逆變側控制方式切換為CEA控制后,Δγ隨Id增大而減小,而控制系統對于γ的采集配有最小值保持環節,導致γerr階段性保持不變,從而使得eCEA減小,β減小[20]。又有β=γ+μ,μ為逆變器換相角。當ULI不變時,μ與Id正相關[21]。因此β的減小及μ隨Id的增大共同導致γ減小。由于逆變側控制方式切換為CEA控制時,案例2中Id較案例1中更大且增速更快,引起Δγ較小且迅速降低,導致γ<γmin,逆變器于4.113 s換相失敗。 綜上所述,ULR恢復導致逆變器換相失敗時,直流系統電氣量及控制量的變化特性如下: (1) 逆變側控制方式由CC控制切換至CEA控制時,Id較大,而Id指令值由主控級提供為1 p.u.,使得Δγ較小。 (2) 逆變側控制方式切換為CEA控制后,Id增速較快,使得Δγ迅速降低。由于控制系統對γ的采集配有最小值保持環節,使得γerr不變,故eCEA隨Δγ減小,β減小。由于β=μ+γ,μ與Id正相關,故γ隨β減小,γ<γmin,逆變器換相失敗。 由第2章分析可知,ULR恢復時,Id的變化特性是影響逆變器換相的重要因素。Id的變化特性與逆變側CC及CEA控制有關。 因此,可通過改善VDCOL及CEC控制特性以抑制ULR恢復時逆變器換相失敗的發生。由于直接改變VDCOL及CEC的參數勢必會影響逆變側控制系統在其他工況下的響應,因此文中提出了一種在CEC動作期間對CEA輸入進行補償,以抑制ULR恢復時Id增速較快導致逆變器換相失敗的方法。其結構框如圖4所示。 圖4 改進的定關斷角控制Fig.4 Improved constant extinction angle control 圖4中,藍色虛線框內為文中所提的改進裝置;a為改進裝置退出閾值。CEC動作期間γ的采集配有最小值保持環節,會階段性保持不變,而β隨Δγ減小,使得γ有減小趨勢。可認為γ與Δγ正相關,可用Δγ的升降表示短期內γ的變化趨勢。可得到該改進裝置的投入條件為: (1) 接收到整流側的啟動信號(ULR低于設置的啟動閾值b); (2)γm+Δγ≤c,c為改進裝置的啟動閾值; 當該改進裝置同時滿足投入條件(1)和(2)后,將計算后得到的差值輸入斜坡函數,函數關系如圖5所示。 圖5 改進裝置中的斜坡函數關系Fig.5 Slope function diagram in improved device 圖5中,d為改進裝置的輸出值,即補償量。d隨輸入值增大,即γm+Δγ越小,補償量越大。當γm+Δγ≥a時,退出該裝置。 文中采用PSCAD/EMTDC電磁暫態仿真軟件利用CIGRE HVDC標準測試模型進行仿真驗證。設置t0=2 s,t2=4 s,ULR跌落后Ud=U2=0.5 p.u.。系統額定運行時,γ=15°,為能有效抑制換相失敗并在改進裝置切出時減少系統的波動,取a=10°。設置改進裝置啟動閾值b=0.6 p.u.[13]。文中以γmin=7°作為換相失敗判據,預留裕度取c=8°;d=a-c=2°為改進裝置最大補償量。逆變側控制系統新增改進裝置后,CEA控制輸入輸出及補償量波形如圖6所示,Ud=U2。 圖6 定關斷角控制輸入輸出及補償量波形Fig.6 Waveforms of input and output of constant extinction angle control and compensation 由圖6可知,不等式γm+Δγ≤8°于4.11 s成立,隨后改進裝置投入,補償值為2°,持續至4.16 s后逐步降低至0。改進裝置切出后,系統在原控制系統作用下趨向額定運行點。 逆變側控制系統改進前后換流變壓器閥側電流及γ波形如圖7、8所示,Ud=U2。圖7中,ida,idb,idc為Y/△接線方式換流變壓器閥側三相電流;iya,iyb,iyc為Y/Y接線方式換流變壓器閥側三相電流。由圖8可知,逆變側控制系統改進前,換流變壓器閥側電流滿足換相失敗特征,且γ<γmin,逆變器換相失敗[7]。控制系統改進后逆變器未發生換相失敗。 圖7 閥側電流波形Fig.7 Waveforms of valve-side current 圖8 關斷角波形Fig.8 Waveforms of extinction angle 由上述仿真可知,改進裝置能夠有效抑制由ULR恢復導致的逆變器換相失敗。另外,由于改進裝置需將整流側的信息傳輸至逆變站,而直流線路一般較長,信號傳輸存在延時,通常耗時20~30 ms[17](當直流線路為1 000 km時)。為驗證通信延時對改進裝置有效性的影響,在仿真模型中增加模擬通信延時環節,延時時長取25 ms,分別對控制器改進前、控制器改進后、控制器改進后且考慮通信延時3種情況進行不同工況下的仿真測試,仿真結果表明通信延時對改進裝置影響較小。 文中以CIGRE HVDC標準測試系統為例,針對整流側換流母線電壓恢復可能導致逆變器換相失敗的現象,分析其機理并提出了有效的抑制措施,得出以下結論: (1) 電壓恢復后期,逆變側控制方式由定電流控制切換為定關斷角控制后,電流偏差控制輸出隨直流電流增大而減小,而控制系統對于關斷角的采集配有最小值保持環節,導致定關斷角控制輸出隨電流偏差控制輸出減小,關斷角亦減小,具有換相失敗風險。 (2) 電壓恢復時,直流電流變化特性是誘發逆變器換相失敗的重要原因。逆變側控制方式由定電流控制切換為定關斷角控制時,直流電流較大,或在隨后一段時間內,直流電流增速過快是導致逆變器換相失敗的2個主要因素。 (3) 針對整流側換流母線電壓恢復導致逆變器換相失敗提出了一種抑制措施。在不改變原控制系統參數的基礎上增加了改進裝置,仿真驗證了控制系統改進后的有效性。 由于文中所提改進方法需將整流側信息傳輸至逆變站,若通信通道發生故障,則該方法失效。此外,該方法僅適用于實測型關斷角控制,而針對預測型關斷角控制的改進還需進一步研究。2.2 電壓恢復導致逆變器換相失敗的機理
3 控制器改進措施
4 仿真驗證
5 結論
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
少先隊活動(2021年2期)2021-03-29 05:40:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化(高中版.高二數學)(2019年6期)2019-06-24 03:37:50
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國公路(2017年7期)2017-07-24 13:56:38
中學生數理化(高中版.高二數學)(2016年4期)2016-03-01 03:46:18