蘋果采摘裝置螺旋式末端的設計
2021-08-13 04:26:14劉吉安
農業技術與裝備 2021年6期
劉吉安
(廣東工業大學藝術與設計學院,廣東 廣州 510090)
根據國家統計局數據,2018年蘋果產量41 390×104t。在收貨季節,采摘蘋果基本依靠人工,收獲采摘基本占生產作業量的40%[1]。20世紀90年代中期,我國開始進行農業機器人的研究,相較于發達國家起步較晚,也取得了一些成果[2]。以日本和美國為代表的發達國家從20世紀80年代開始研究采摘機器人,并取得了大量研究成果[3]。目前,我國采摘蘋果還存在一些關鍵難題。對于采摘機器的視覺而言,果園是十分復雜的自然環境,果園中光照條件不確定性、果實顏色相近、果實被枝葉遮擋、顏色不均勻、大量陰影、果實擾動以及果實重疊等因素都增加了目標的識別和定位難度[4-8]。
為了解決這些問題,經過實地調研和試驗,設計了一種蘋果采摘裝置螺旋式末端。
1 總體設計方案
螺旋式末端的主要結構見圖1。其中,右旋螺旋葉片與左旋螺旋葉片相鄰安裝,螺旋槽形成一對鉗口形狀見圖3。螺旋式末端成網格排列見圖2。采摘工作環境見圖4。右旋螺旋葉片與轉動軸同軸,左旋螺旋葉片與轉動軸同軸,軸承座安裝在機架上,轉動軸安裝在軸承座上,齒輪安裝在轉動軸的后端,皮帶連接皮帶輪一與皮帶輪二,電機連接皮帶輪一,電機安裝在機架上。
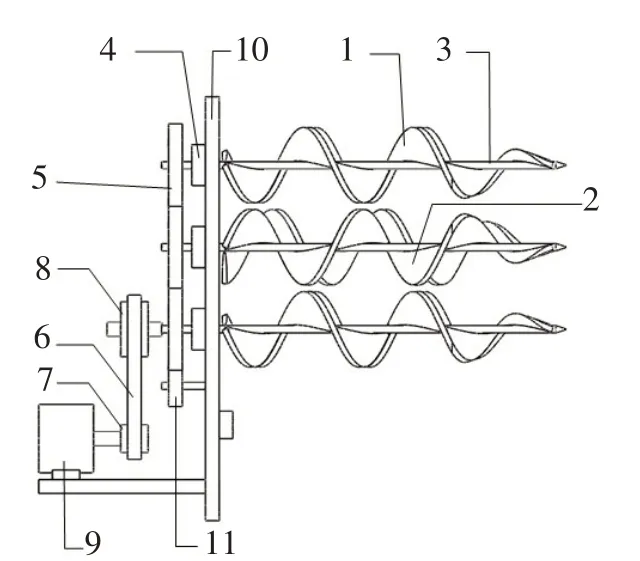
圖1 采摘裝置末端的側視圖Fig.1 The sideview of the end of the picking device
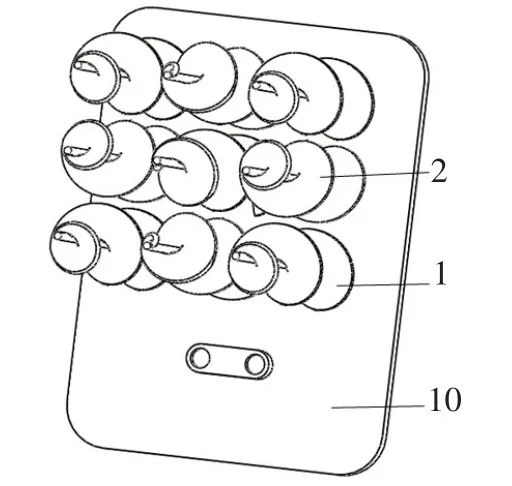
圖2 螺旋葉片網格排列示意圖Fig.2 The grid arrangement diagram of spiral blade
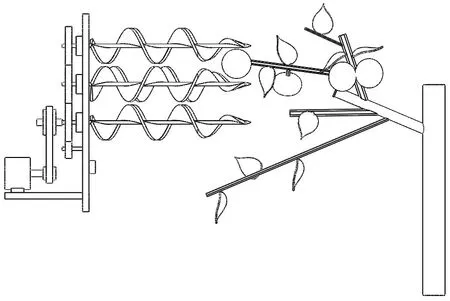
圖3 采摘示意圖Fig.3 The schematic diagram of picking apples
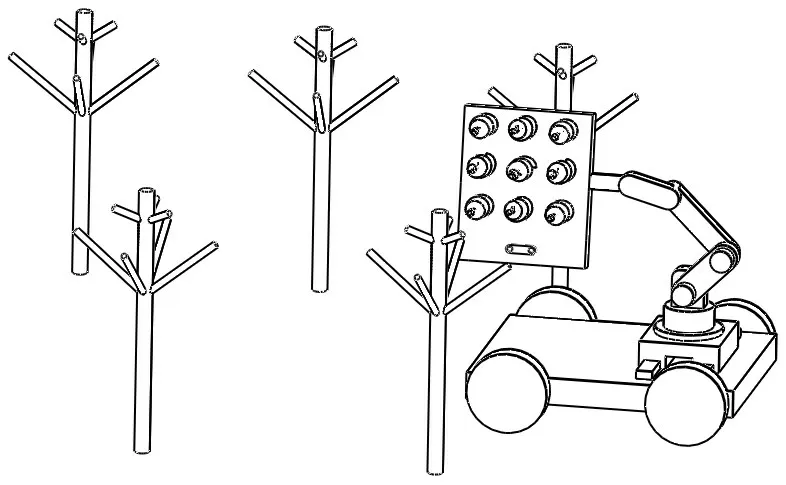
圖4 采摘工作環境示意Fig.4 The picking working environment
2 工作原理
(1)利用螺旋副傳動原理,螺旋升角越小,沿螺紋面方向的分力越小,垂直于螺紋面的分力越大;反之,沿垂直于螺紋面的分力越小。根據上述原理,螺旋葉片的軸向分力施加在蘋果上,可以產生拉力。因此,首選較小的螺旋升角,用來增強1對蘋果的拉力,提高采摘效果。拉力計算參考:計算公式參見機械設計手冊或絲軸制造企業行業手冊。

η——絲軸傳動效率,大約為0.9~0.95;P——拉力;T——轉矩;L——絲軸導程。
(2)螺旋葉片轉動,軸向分力像波浪一樣傳遞給接觸到的蘋果,即使蘋果被樹葉擋住,因為樹葉柔軟可以輕易擺動,所以螺旋葉片可以隔著樹葉傳遞動力給蘋果。
(3)相鄰的轉動軸的間距小于蘋果直徑,所以被采摘下來的蘋果不會從軸間隙掉落到地面。
(4)采摘路徑規劃:先采摘樹根邊緣的蘋果,從突出的樹枝開始進入,然后逐漸向樹頂采摘。這樣的采摘路徑可以減少采摘裝置碰掉周圍的蘋果。
3 使用方法
采摘作業時,螺旋式采摘裝置安裝在采摘機器的機械臂前端,前高后低。啟動電機正轉,右旋螺旋葉片逆時針轉動和左旋螺旋葉片順時針轉動,這樣轉動可以使螺旋葉片產生的推力方向一致。在自動化控制與機器視覺引導下,采摘裝置瞄準有蘋果的大概位置,螺旋葉片像鉆頭一樣鉆進枝葉中,相鄰的螺旋槽相對轉動,組成多個鉗口形狀,運動效果是連續地咬合、推動的動作。螺旋葉片推動接觸到的蘋果和部分樹葉,即使蘋果被樹葉擋住,因為樹葉柔軟可以輕易擺動,所以螺旋葉片可以隔著樹葉推動蘋果,電機也可以快速變換正反轉動,接觸到的蘋果和樹葉大幅度、高頻率的擺動,果柄和樹葉折斷,蘋果落入螺旋槽里。機械臂帶動采摘裝置從樹枝中退出,退出過程中,螺旋葉片保持轉動,采摘裝置保持前高后低,防止蘋果留在樹枝中或從前端掉落。退出樹枝后,采摘裝置降低高度,改為前低后高,電機反向轉動,右旋螺旋葉片與左旋螺旋葉片都反向轉動,螺旋槽吐出蘋果。按照采摘路徑規劃,重復上述采摘動作,把果樹按照經緯線分區,圍繞果樹轉一圈,就可以采摘下來整個樹的蘋果了。
4 可能遇到的問題及解決對策
螺旋葉片鉆進果樹枝過程中,可能遇到的問題及解決方法如下。①頂到樹干或粗大的樹枝,柔軟、彈性的螺旋葉片和轉動軸可以被擠壓彈開,避讓阻擋物。②如果阻力過大,可以先退出樹枝,然后偏移一些位置再重新鉆進樹枝中。③遇到樹枝茂密無法插入,避開正面茂密的樹枝,從兩側插入。④對于在采摘蘋果的過程中可能會碰落不少樹葉,經過對部分果農調研,果農認可在采摘過程中碰落樹葉,因為秋收后,果樹的樹葉基本都自行脫落了。⑤果柄的直徑小于樹枝的直徑,螺旋葉片的推力大于果柄折斷需要的力,小于樹枝損傷的力,就可以保護樹枝不會損傷。
5 結語
螺旋葉片呈網格布局,形成多層網狀,覆蓋面積大,可以接觸到掛果區表面和內部的蘋果,一次可以采摘多個相鄰的蘋果。不需要精準瞄準蘋果或果柄,降低了設備軟件、硬件的要求,減少了成本,提高了生產效率。