種蛋智能篩選系統的設計
2021-08-13 04:26:14胡思旋于亞萍
農業技術與裝備 2021年6期
關鍵詞:系統
胡思旋,劉 源,李 峰,于亞萍
(天津農學院工程技術學院,天津 300384)
1 系統的工作原理
系統是由控制器、稱重模塊、傳送帶控制模塊、圖像采集模塊、機械臂控制模塊組成。控制器控制壓力傳感器檢測禽蛋質量,控制機械手去除不合格的禽蛋,將合格禽蛋放置傳送帶,完成初步篩選;控制器控制傳送帶至攝像頭,采集禽蛋圖像,傳送到PC機,利用Matlab軟件對禽蛋圖像進行分析和處理,判斷其新鮮度,不合格和合格分別以0或1表示。利用Matlab的Tmtool工具與Arduino取得連接,將0或1發送到Arduino的串口緩沖區,再將數據發送至Arduino控制器,控制機械臂完成相應動作實現禽蛋分揀。實現對禽蛋孵化前的優質種蛋的選擇。
2 系統的硬件設計
2.1 控制器
控制器采用Arduino UNO,基于ATmega328P單片機的開發板。具備14路數字輸入/輸出引腳(其中6路可用于PWM輸出)和6路模擬輸入。工作電壓為5 V,驅動電流最大為50 mA。
2.2 稱重模塊
2.2.1 稱重電路
稱重電路由壓力傳感器、24位A/D轉換器芯片HX711模塊、Arduino芯片組成。壓力傳感器采用電阻應變片式壓力傳感器。可將被測件上質量的變化轉換成為電壓傳送給A/D轉換器。HX711模塊具有高精度、速度快、抗干擾性強的特點,將電壓轉化成數字量后,傳送給Arduino單片機。單片機與標準種蛋質量相比較,控制機械手抓取動作。
2.2.2 稱重機械手
稱重機械手用來抓放禽蛋,完成禽蛋質量篩選。由主動爪機構、從動爪機構、基座、2個sg90舵機組成。抓握動作由舵機帶動主動爪,再通過齒輪傳動帶動從動爪完成。舵機順時針轉動機械手完成“抓”的動作,反之完成“放”的動作。篩選動作由舵機帶動基座完成。在質量范圍內的雞蛋將會由舵機帶動基座,機械手將雞蛋放到蛋槽里進入傳送帶,進行第2步篩選。
2.3 圖像采集模塊
圖像采集模塊由攝像裝置、Arduino控制器組成,控制器負責定位控制、圖像的獲取、圖像向上位機的傳輸。攝像裝置由USB高清免驅800萬像素自動對焦像頭、暗箱、燈箱組成[1]。暗箱提供不透光的拍攝環境,攝像頭負責拍攝雞蛋照片,燈箱由箱體、光源、燈泡支撐架、底座構成,負責照射待拍照的雞蛋。
2.4 傳送帶控制模塊
2.4.1 傳送帶機械結構
選蛋系統的機械結構見圖1。傳送帶的搭建由擋板、支撐板、轉軸、皮帶、電機構成。兩側的擋板負責固定轉軸與電機。支撐板負責穩定傳送帶并給皮帶提供一定的支撐力。
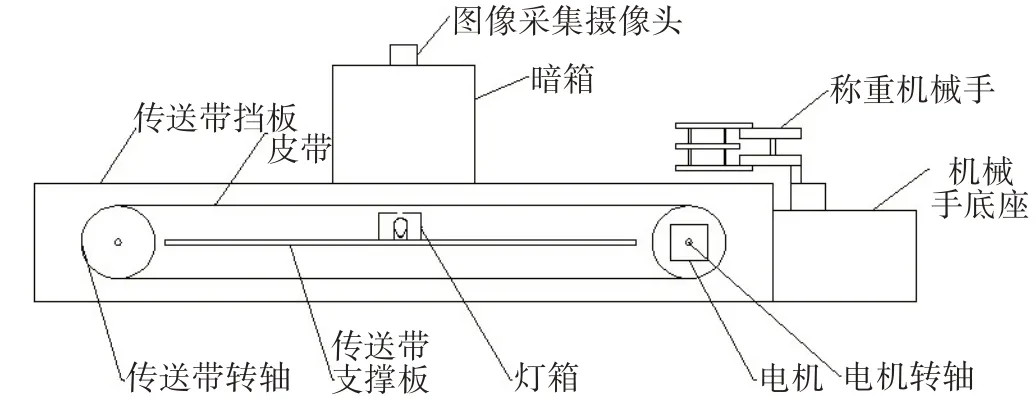
圖1 系統機械結構Fig.1 The system mechanical structure
2.4.2 電機控制
系統采用42步進電機17HS4401S和驅動器TB6600完成控制。傳送帶的定位是由電機脈沖數來決定,高電平與低電平的時間和為一個脈沖,本次使用的42步進電機每給一個脈沖轉動1.8°,轉軸轉動1周需要200個脈沖,本次控制精度只需設置調為4細分,即步距角為0.45°,根據實測顯示電機每轉動1°傳送帶前進0.5 mm,當蛋托與攝像頭垂直時,需要傳送帶前進200 mm,電機轉動400°即890個脈沖。
2.5 機械臂控制模塊
機械臂采用6自由度機械臂可編程拼裝機械手臂stm32ArduinoUNOR3,由6個舵機控制6個自由度的轉動,采用Arduino舵機控制器,在線運行模式。當Matlab通過串行口將0或1信息發送到Arduino的硬串口時,單片機控制機械臂完成相應動作實現禽蛋的分揀。
3 軟件設計
3.1 主程序設計
主程序設計流程見圖2。稱重控制程序完成,禽蛋質量的采集與標準質量比較,完成禽蛋分揀。傳送帶控制程序完成,傳送帶電機的定位控制。當禽蛋到照射位置時,向單片機發出定位信號,觸發攝像頭動作,調圖像采集與處理程序。
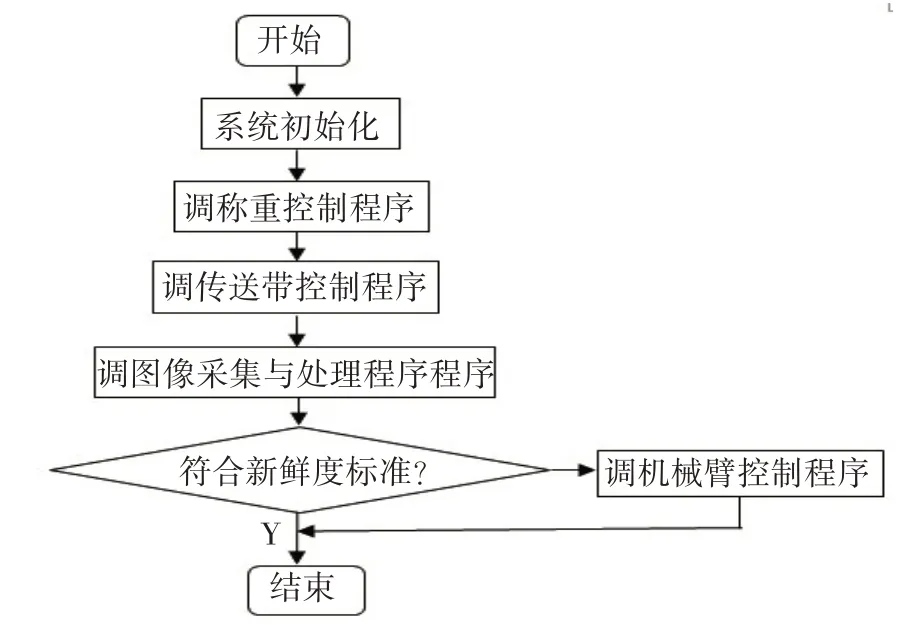
圖2 主程序設計流程Fig.2 Theflow chart of main program design
3.2 上位機與Arduino之間的通信
用Matlab軟件對雞蛋圖像分析后,將得到的新鮮度結果以0或1的形式輸出。利用Matlab的Tmtool工具與Arduino串口通信,將0或1發送到Arduino的串口緩沖區,然后向機械手發出執行命令。
3.3 機械臂控制程序
當接收到Arduino發出的分揀執行命令后,啟動不同的舵機,執行動作指令。當收到0,將禽蛋剔除;若是1,將禽蛋放入孵化環境進行孵化,實現雞蛋的篩選。
4 系統測試
4.1 調試條件
系統調試是在Windows10系統下,運用ArduinoIDE軟件串口監視器以及Matlab軟件,Arduino、USB高清免驅800萬像素自動對焦攝像頭和各種執行部件到位下完成的。
4.2 調試方法
隨機選取30枚雞蛋作為實驗樣本,要求蛋殼表面無污物,外表光滑且沒有裂紋。實驗樣品隨機分為5組,每組6個,將每個樣品標以序號區分,統一放置在相同環境中貯藏[2]。
啟動系統,自動完成2級篩選。其中,圖像處理新鮮度篩選采用,用Matlab軟件對采集到禽蛋圖進行預處理、提取雞蛋特征值、氣室特征值,并對特征參數進行計算等處理。
禽蛋新鮮度相關的3個特征參數為氣室面積比、氣室高度比、氣室直徑,建立圖像提取參數與實測參數的一元哈夫值回歸模型[3]。該一元回歸模型的相關系數為0.96,擬合優度為0.92,氣室面積比與哈夫值存在明顯的相關性,氣室面積比越小,雞蛋的哈夫值越大,證明雞蛋越新鮮。不新鮮禽蛋用0表示,新鮮為1。
5 結語
系統運行后,禽蛋的質量和新鮮度特征參數及檢測結果均能在上位機界面顯示。禽蛋的分揀準確率能達到98.7%,系統運行正常。該系統操作簡單,易于推廣。為禽蛋孵化過程全自動化打下基礎。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32