模糊控制在壓鑄機(jī)壓射速度控制系統(tǒng)中的應(yīng)用
2021-08-13 04:26:20孔令成陳若愚
機(jī)械制造與自動(dòng)化 2021年4期
關(guān)鍵詞:模型
孔令成,陳若愚
(南京理工大學(xué) 機(jī)械工程學(xué)院,江蘇 南京 210094)
0 引言
壓力鑄造是將熔融狀態(tài)的金屬在高壓、高速的狀態(tài)下填充到型腔里,并繼續(xù)施加壓力,在壓力作用下凝固形成鑄件的一種精準(zhǔn)、高效的有色合金精密成型技術(shù)。隨著壓鑄機(jī)性能的改進(jìn),能夠鑄造出各種復(fù)雜幾何結(jié)構(gòu)的產(chǎn)品,壓鑄機(jī)越來(lái)越廣泛地應(yīng)用在各個(gè)行業(yè)的各種裝備和零部件的制造中[1]。特別是近幾年新能源汽車(chē)的迅速發(fā)展對(duì)汽車(chē)輕量化提出了更高、更迫切的要求。目前汽車(chē)輕量化的主要方法是使用輕質(zhì)材料,但汽車(chē)一些關(guān)鍵部件不能只依靠輕質(zhì)材料,還需要合適的先進(jìn)成型工藝予以支撐,壓鑄是汽車(chē)安全件、結(jié)構(gòu)件實(shí)現(xiàn)高性能和輕量化的主要途徑。
1 壓鑄機(jī)速度控制系統(tǒng)物理模型
壓射機(jī)構(gòu)是壓鑄機(jī)的關(guān)鍵部件,壓射機(jī)構(gòu)的性能直接決定了壓鑄產(chǎn)品的質(zhì)量。壓鑄機(jī)構(gòu)包括壓射沖頭、壓射油缸、增壓和快壓射蓄能器、壓射桿以及壓射室等[2]。本文分析的是速度控制系統(tǒng),增壓蓄能器不參與工作,所以速度控制系統(tǒng)可以簡(jiǎn)化,以便于建模和分析[3]。
壓鑄機(jī)的壓射過(guò)程分為慢壓射和快壓射兩個(gè)階段,慢壓射是沖頭以較慢的速度推進(jìn),防止鑄件出現(xiàn)卷氣缺陷,沖頭經(jīng)過(guò)澆料口以后進(jìn)入快壓射部分,快壓射時(shí)沖頭以很高的速度推動(dòng)金屬液填充至型腔內(nèi)[4-5]。最難也是最重要的是對(duì)第二階段快壓射的控制。快壓射時(shí)的流量主要都是由蓄能器所提供,為了簡(jiǎn)化模型,將蓄能器作為油源,簡(jiǎn)化后的模型如圖1所示。
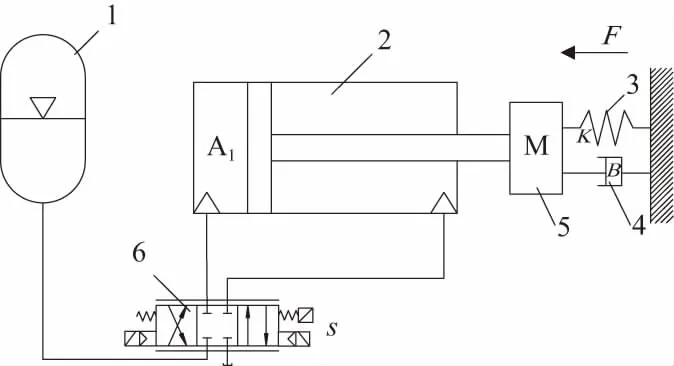
1—蓄能器;2—壓射油缸;3—彈簧振子;4—阻尼;5—負(fù)載;6—比例閥。
簡(jiǎn)化的物理模型中的壓射油缸由于只有A1腔有高壓油的作用,因此將其簡(jiǎn)化成簡(jiǎn)單的非對(duì)稱(chēng)油缸,將負(fù)載簡(jiǎn)化成一個(gè)帶阻尼的彈簧[6]。比例閥是個(gè)帶有先導(dǎo)級(jí)的三級(jí)流量閥,通過(guò)電信號(hào)進(jìn)行流量的控制,從而調(diào)節(jié)液壓桿的運(yùn)動(dòng)速度。
2 壓鑄機(jī)速度控制系統(tǒng)數(shù)學(xué)模型
2.1 蓄能器的數(shù)學(xué)模型
本文蓄能器選用的是氣囊式活塞蓄能器,蓄能器由于釋放的速度很快,所以可以看做絕熱過(guò)程,即滿(mǎn)足:
PVγ=const
(1)
假設(shè)蓄能器中的氣壓和液壓的壓力相同,可得
(2)
式中:V為蓄能器打開(kāi)后任意時(shí)刻的空氣容積,m3;V0為蓄能器初始時(shí)刻的空氣容積,m3;P為蓄能器內(nèi)任意時(shí)刻的壓力,Pa;P0為蓄能器預(yù)充氣壓力,Pa;γ絕熱指數(shù),蓄能器釋放快時(shí)取1.4。
為了簡(jiǎn)化數(shù)學(xué)模型,忽略蓄能器、進(jìn)油腔和管路的油液壓縮性:
(3)
式中:Q為蓄能器的流量,m3/s;假設(shè)蓄能器至油缸之間的壓力損失為ΔPL,則有:
ΔPL=cQ2
(4)
P1=P-ΔPL
(5)
式中:ΔPL為蓄能器至進(jìn)油腔油液的壓力損失,Pa;P1為壓射油缸的進(jìn)油腔壓力,Pa;C為壓力損失系數(shù),Pa·s2/m6。
由于蓄能器中減少的油液體積等于進(jìn)入油缸進(jìn)油腔的體積,可得:
(6)
V=V0+A1xp
(7)
從而可得
(8)
2.2 比例流量閥的數(shù)學(xué)模型
根據(jù)比例閥產(chǎn)品說(shuō)明書(shū)可知,當(dāng)△P=1.0MPa時(shí)額定流量為1500L/min,響應(yīng)時(shí)間是10ms。此閥壓差與流量為
(9)
式中:ΔP實(shí)際為伺服比例閥進(jìn)出口壓差,MPa;ΔP額定為伺服比例閥進(jìn)出口額定壓差,MPa;Q額定為額定流量,m3/s;Q實(shí)際為實(shí)際流量,m3/s。
Q額定與輸入電流成正比:
Q額定=Ksvi
(10)
式中:i為電流,A;Ksv為流量增益,m3/(A·s)。
從而有
(11)
2.3 壓射油缸的數(shù)學(xué)模型
若不計(jì)泄漏,油腔的流量方程為
(12)
式中:V2為壓射油缸出油腔的體積與出油口到節(jié)流閥閥口之間的油液體積之和,m3;E為油液的有效體積彈性模量,Pa;A2為壓射油缸出油腔的油液作用面積,m2;xp為活塞桿的運(yùn)動(dòng)位移,m;P2為油缸出油腔內(nèi)油液壓力,Pa;Q2為油缸的出油腔流量,m3/s。
V2=V′0-A2xp
(13)
式中:V′0為初始狀態(tài)下的出油腔體積與出油口到節(jié)流閥閥口之間的油液體積之和,m3。
壓射缸沖頭所受力的平衡方程為
(14)
式中:∑F為總的負(fù)載力,N;M為活塞和油液及負(fù)載的等效質(zhì)量,kg;K為等效彈簧剛度,N·m-1;Fl為負(fù)載力,N;Fc為庫(kù)侖力,N;A1為壓射油缸進(jìn)油腔的油液作用面積,m2;B為等效黏性阻尼系數(shù),Ns·m-1。
由式(11)、式(12)可得到以下關(guān)系
(15)
由式(8)、式(13)、式(14)、式(15)得
(16)
3 模糊PID控制在壓射速度控制上的應(yīng)用
3.1 模糊PID控制方案
PID控制具有可靠度高、穩(wěn)定性好、簡(jiǎn)單等特點(diǎn),在工業(yè)控制領(lǐng)域應(yīng)用廣泛,但由于壓鑄機(jī)速度控制系統(tǒng)是一種大滯后且非線性的復(fù)雜系統(tǒng),因此固定的PID參數(shù)很難滿(mǎn)足壓鑄機(jī)的控制要求[7-8]。為了簡(jiǎn)化數(shù)學(xué)模型,忽略蓄能器、進(jìn)油腔和管路的油液壓縮性,但這樣得到的不是精確的數(shù)學(xué)模型,只是一定程度反映系統(tǒng)的實(shí)際情況。模糊控制不需要很精確的模型,且適用性好、魯棒性強(qiáng)。所以把二者結(jié)合得到的模糊PID同時(shí)擁有二者的優(yōu)點(diǎn),因此可以獲得更好的控制效果[9],模糊PID控制系統(tǒng)原理如圖2所示。

圖2 模糊PID控制系統(tǒng)原理
模糊PID控制系統(tǒng)的執(zhí)行過(guò)程是,先找出PID控制器的3個(gè)參數(shù)KP、KI、KD與速度偏差e和速度變化率ec之間的模糊關(guān)系,在工作過(guò)程中持續(xù)測(cè)量速度偏差和速度變化率,根據(jù)模糊推理對(duì)PID控制器的KP、KI、KD進(jìn)行實(shí)時(shí)修正,使系統(tǒng)達(dá)到良好的性能。
3.2 模糊規(guī)則設(shè)計(jì)
模糊PID控制器有兩個(gè)輸入,分別是速度偏差e和速度變化率ec,輸出為利用模糊規(guī)則修改過(guò)的PID參數(shù)即ΔKP、ΔKI、ΔKD。定義e和ec論域?yàn)閇-6,6]、[-3,3];ΔKP、ΔKi、ΔKD的論域?yàn)閇-1,1]、[-3,3]、[-0.2,0.2];模糊集取為{NB,NM,NS,ZO,PS,PM,PB}。隸屬度函數(shù)選取最常用的三角型隸屬度函數(shù)如圖3所示,以Mamdani模糊系統(tǒng)為推理方法,如圖4所示,控制規(guī)則輸入和輸出之間的關(guān)系通過(guò)49個(gè)模糊規(guī)則用“If…and…then…”來(lái)表達(dá)。

圖3 隸屬度函數(shù)
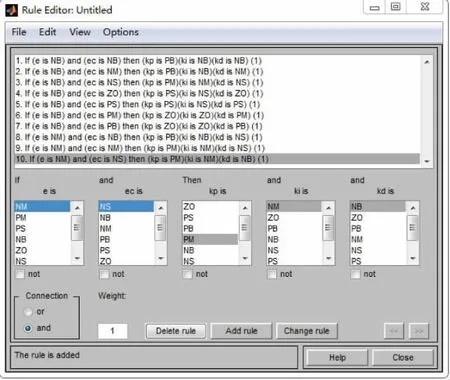
圖4 模糊規(guī)則(部分)
4 建模及仿真分析
在MATLAB/Simulink平臺(tái)上建立模糊控制壓射控制系統(tǒng)仿真模型(圖5),系統(tǒng)的仿真參數(shù)見(jiàn)表1。圖5所示中的“speed” 是封裝了速度控制模型的自定義S-Function模塊,輸入信號(hào)幅值為12的階躍信號(hào)。
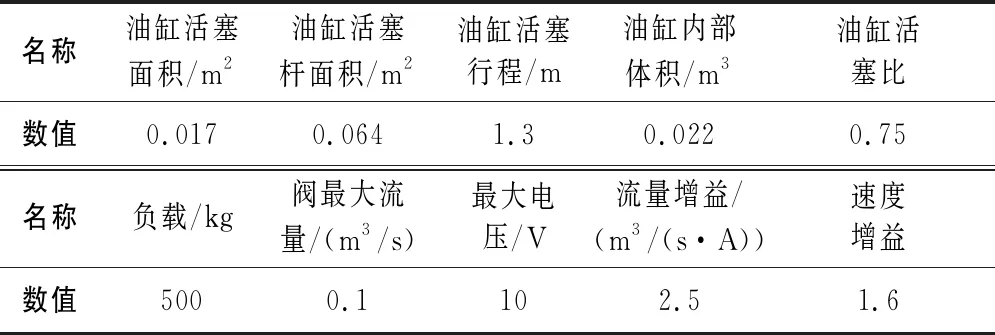
表1 速度控制系統(tǒng)的仿真參數(shù)
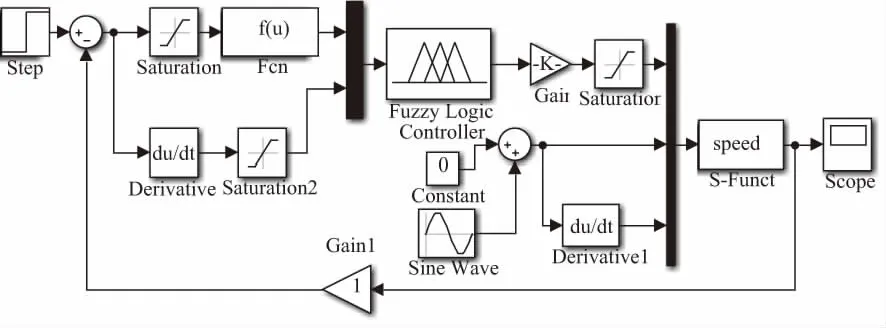
圖5 壓射速度模糊PID控制仿真模型
在MATLAB/Simulink中所得到的模糊PID和常規(guī)PID的結(jié)果如圖6所示。圖中Fuzzy PID是模糊PID控制下的曲線,曲線PID是常規(guī)PID控制下的曲線(KP=30、KI=15、KD=0.3)。在常規(guī)PID和模糊PID控制中穩(wěn)定速度的時(shí)間分別維持在0.4s和0.6s左右。從圖中可以看出模糊PID得到的速度曲線比常規(guī)PID得到的速度曲線達(dá)到穩(wěn)態(tài)速度所需要的時(shí)間更短,并且可以看出超調(diào)量幾乎為0,速度波動(dòng)較小。
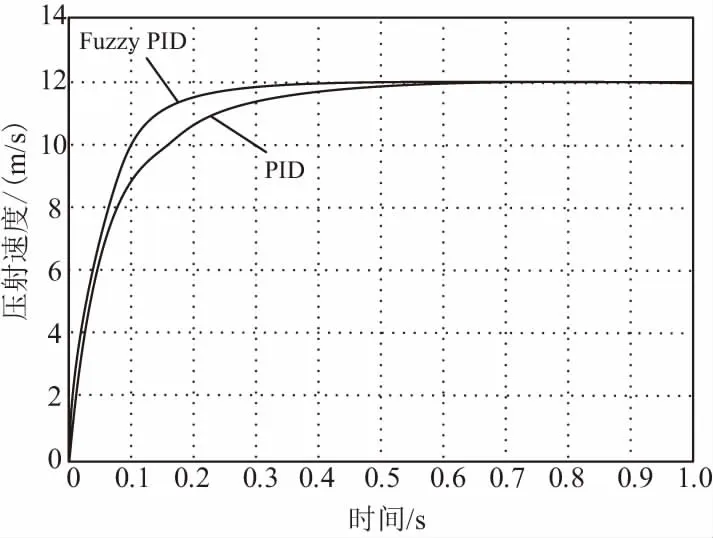
圖6 模糊PID與常規(guī)PID仿真結(jié)果
5 結(jié)語(yǔ)
綜上所述,本文首先建立了壓鑄機(jī)速度控制系統(tǒng)的物理模型,在物理模型的基礎(chǔ)上建立了速度控制系統(tǒng)的數(shù)學(xué)模型,設(shè)計(jì)了該系統(tǒng)的模糊控制器并在Simulink中進(jìn)行仿真,其表現(xiàn)出的穩(wěn)定性、速度響應(yīng)特性等特點(diǎn),比常規(guī)的PID控制更優(yōu)秀,控制系統(tǒng)的穩(wěn)定性和靈活性較高,可針對(duì)不同的控制對(duì)象對(duì)模糊控制、PID參數(shù)進(jìn)行對(duì)應(yīng)的修改,滿(mǎn)足壓鑄機(jī)的控制要求。
猜你喜歡
童話(huà)王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
