基于虛擬樣機技術的一種智能花卉設計
2021-08-13 04:26:28鄒俊俊馮巖馮小庭毛駿
機械制造與自動化 2021年4期
鄒俊俊,馮巖,馮小庭,毛駿
(西安鐵路職業技術學院,陜西 西安 710014)
0 引言
隨著經濟發展和城市化的進步,城市景觀已經成為必不可少的城市名片,它是體現城市文化生活品質的重要標志之一。現有城市景觀多在造型設計、燈光效果兩個維度上進行組合,以追求“立體、動態”的美感,但從本質來說仍屬于平面景觀及靜態景觀,仍存在以下幾點不足:一是缺乏城市自身特點,千城一面;二是景觀功能單一,無法實現人景互動。人們參觀傳統人文景觀時,很難融入主題當中[1-2]。
因此,本文闡述了在普通仿真花設計的基礎上,增加造型結構、照明結構、檢測裝置、機械運動裝置、輔助裝置五大部分創新設計,為靜態景觀賦予“生機”,在造型、燈光、運動、交互性四個維度上展現科技、藝術之美,提高城市景觀品質,打造多元化城市文旅新格局。
1 智能花卉設計思路和整體結構
本產品的整體設計思路為:利用超聲波傳感器檢測范圍內是否有人或者車輛經過,將檢測信號輸出至單片機控制核心;根據程序算法輸出控制指令,控制燈光模塊產生顏色、明暗變化,同時控制運動機構中的伺服電機驅動整個機械結構運動,以控制花瓣的開合,向游客輸出景觀的色彩、運動姿態變化,使游客獲得參與式、交互式的觀景體驗。整體設計方案如圖1所示。

圖1 產品整體設計方案
按照上述設計思路本產品的具體結構如圖2所示,由造型結構、照明裝置、檢測裝置、機械運動裝置、輔助裝置五大部分組成。

圖2 一種“4D”智能花卉景觀產品結構示意圖
1)結構造型
智能花卉的結構造型步驟如下:1)通過逆向工程建模,以3次B樣條曲線縮放參數生成葉片和花瓣的曲面造型結構,再將其數字模型導入3D打印機,高效快速制作出各種仿真花卉,然后安裝固定在特制的骨架上,使其保持花卉的造型和美感;2)通過CATIA三維設計和3D打印技術制作的花瓣造型。通過膠粘劑附著于定制專用骨架。

圖3 花瓣結構3D打印切片模型
2)照明裝置
智能花卉的照明裝置采用LED發光二極管+太陽能電池的組合,通過太陽能面板在白天吸收能量,到夜間時,當傳感檢測裝置檢測到行人和車輛通過時,啟動LED發光二極管。
3)檢測裝置
檢測裝置由超聲波傳感器和STM32F103單片機構成。利用STM32F103單片機定時器在5~10μs內產生高電平脈沖信號,超聲波傳感器接收到脈沖信號,發射向外的聲波,遇到障礙物發生反射,經過電路處理濾波放大,再次送入STM32F103單片機[3]。
4)機械運動裝置
根據花卉仿生原理,花瓣運動應為間歇運動。因此智能花卉使用伺服電機作為動力元件,以凸輪-連桿組合機構作為傳動機構,以單片機為控制元件,以上述花瓣造型部分作為執行元件,將伺服電機輸出的回轉運動轉換為執行元件的開合運動,模擬花開與花謝的動作[4]。
2 花瓣運動組合機構分析與仿真
1)花瓣運動機構位置分析
本產品以凸輪-連桿組合機構實現其功能,其運動簡圖如圖4所示。凸輪機構采取對心直動布置形式,滾子從動件采取勻速運動規律上升和下降,同時為了保證凸輪在兩個休止位之間運行時,連桿機構實現花瓣在0°~60°范圍開合,滑塊的行程范圍須與下一步中的凸輪從動件行程范圍相同。

圖4 花瓣機構運動簡圖
運動機構的整體工作原理如圖5所示。當單片機輸出指令后,在伺服電機帶動下,盤形凸輪機構從遠休止點開始啟動,此時花瓣處于閉合狀態。隨著盤形凸輪順時針旋轉,從動件開始回落,凸輪轉角達到180°時,完成回程,凸輪機構達到近休止點,從動件位移處為0,花瓣執行機構處于“開花”狀態。隨后在近休止點保持一段時間,經過推程從動件繼續上升至原來的位置,花瓣閉合。
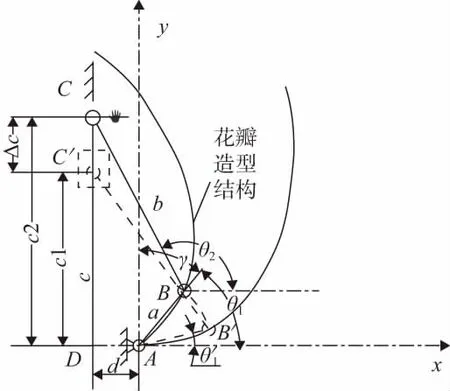
圖5 曲柄滑塊機構運動簡圖
該機構上半部分可以簡化為一個偏置曲柄滑塊裝置,采用解析法進行該機構的運動分析,首先建立該機構的封閉矢量位置方程如下[5]:
L1+L2-L3+L4=0
(1)
可寫為:aejθ1+bejθ2-cejθ3+dejθ4=0
(2)
式中:L1為曲柄AB的矢量形式;L2為連桿BC的矢量形式;L3為滑塊中心到x軸的矢量形式;L4為滑塊偏心距的矢量形式;θ1、θ2、θ3、θ4為圖中構件AB、BC、CD、DA與坐標軸x的方位角。利用歐拉變換將式(2)實部和虛部分離改寫可以得到:
acosθ1+bcosθ2-ccosθ3+dcosθ4=0
(3)
asinθ1+bsinθ2-csinθ3+dsinθ4=0
(4)
根據機構幾何條件可知θ3=90°,θ4=0°,已知曲柄長度L1=30mm,偏距L4=10 mm,花瓣張開的角度γ約為0°~60°,由圖中幾何關系得到θ=90°-γ,故θ1的兩個極限值為30°和90°,滑塊行程Δc和連桿方位角θ2為待求。聯立式(3)和式(4),求得:
由此可知滑塊的行程范圍Δc為
Δc=c-c′=36.2mm。
2)花瓣運動機構速度和加速度分析
式(2)對時間t求一階導數,可得機構中各構件的速度為
(5)
由于θ4為常數,其導數為0,故可消去得到式(6)。
jaejθ1+jbω2ejθ2-jcω3ejθ3=0
(6)
使用歐拉恒等式帶入式(5),分離實部和虛部,聯立得到連桿的旋轉角速度ω2和滑塊的線速度VC如下[6]:
(7)
由于加速度又是速度的一階導數,故式(5)對時間繼續求導可以得到此機構中各構件運行的加速度如下:
(8)

(9)
根據上述方程即可求出此機構各構件在運動過程中的速度和加速度。
2)花瓣運動機構仿真分析
為了驗證本產品的運動規律是否能夠滿足設計要求,通過CATIA建立相關零件的三維模型并按照尺寸約束進行裝配,得到機構的虛擬數字樣機如圖6所示。對所有零部件賦予相應的材質參數后,導入CATIA中的DMU運動仿真分析模塊進行分析。原點設定為曲柄的旋轉中心,x方向設置為水平向右,y方向設置為水平向上,模擬產品實際工作狀態。根據調研結果,花瓣開合時間一般設定為12s,即曲柄往復擺動時間為12s,故曲柄的平均角速度ω1=5deg/s。按照此速度曲柄進行順時針旋轉至限位后回擺至初始位置進行仿真。

圖6 CATIA中組合機構模型總裝圖
本產品滑塊裝置運動位移線圖如圖7所示。由仿真結果看出其行程范圍約為34mm,且滑塊在兩個極限位置之間運動過程中曲柄的擺角范圍約在0°~58°內。此結果說明滑塊的行程在圖示范圍內時,機構能夠完成“花瓣”的開合運動。由于本設計采用了凸輪-連桿的串聯組合機構,滑塊的行程范圍還可以作為下一步凸輪輪廓曲線設計的重要依據。

圖7 “花瓣“運動機構仿真結果
滑塊的線速度和加速度如圖7(c)、圖7(d)所示。由圖線可以看出其速度波形的峰值約為5.8mm/s,其運動過程為加速運動且加速度先減小后增大。因此在運動開始瞬間機構的加速度最大,由仿真結果看出此時加速度的峰值約為0.3mm/s2,但由于滑塊采用的是ABS工程塑料3D打印制作而成,其質量m約為100g左右,故此機構所受的最大瞬時沖擊力Fmax=3×10-4N,對組合機構的整體強度和穩定性產生的影響較小,機構整體運動平順,能夠實現設計要求。
3 結語
本產品的設計與制作是將現代科技與傳統景觀結合的一次大膽嘗試。產品設計過程中采用了虛擬樣機技術,優化了工業設計到結構制造的整個流程。同時利用3D打印這種快速成型技術,直觀了解結構設計的弊端并及時修正,降低設計與制造之間的時間成本,有利于產品的推進與優化,提高工作效率。在控制單元上使用單片機和傳感器實現了產品的自動化控制,通過后續的產品軟件系統完善,還可以實現“智慧夜景”的升級。本產品的推廣使用將帶動仿真花市場和旅游業的發展,具有良好的社會經濟效益。
猜你喜歡
現代裝飾(2021年6期)2021-12-31 05:27:54
小學科學(學生版)(2020年12期)2021-01-08 09:28:10
少年漫畫(藝術創想)(2020年12期)2020-06-09 05:50:08
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
電子設計工程(2015年15期)2015-02-27 12:07:30
