飛機(jī)艙門開關(guān)機(jī)構(gòu)數(shù)字化模型構(gòu)建技術(shù)研究
2021-08-13 04:26:32吳揚(yáng)張樂裘旭冬周石恩陸玥朱駿
機(jī)械制造與自動化 2021年4期
吳揚(yáng),張樂,裘旭冬,周石恩, 陸玥, 朱駿
(1. 上海飛機(jī)設(shè)計研究院,上海 201210; 2. 上海無線電設(shè)備研究所,上海 201109)
0 引言
飛機(jī)艙門機(jī)構(gòu)系統(tǒng)是飛機(jī)的主要機(jī)構(gòu)系統(tǒng)之一(圖1),其能否完成預(yù)期的功能將直接關(guān)系到飛機(jī)的飛行安全性[1]。作為艙門系統(tǒng)的主要測試門類之一,艙門開關(guān)機(jī)構(gòu)聯(lián)動姿態(tài)測試是一項流程復(fù)雜、工作量大的工程。通過仿真模擬與物理測試相結(jié)合的方式,并且未來逐步以虛擬試驗為主,物理試驗為輔,是提高測試效率的有效途徑[2]。在投產(chǎn)和正式試驗啟動前對試驗過程進(jìn)行預(yù)演和分析,能夠提高試驗設(shè)計的準(zhǔn)確性,對于減少試驗成本、縮短試驗件結(jié)構(gòu)優(yōu)化周期具有重要意義[3]。

圖1 飛機(jī)艙門示意圖
傳統(tǒng)機(jī)構(gòu)運動仿真方法大都是以特定運動副來約束組成零件,一般只適用于較為簡單的機(jī)構(gòu),而對于飛機(jī)艙門開關(guān)機(jī)構(gòu)這種零件層級多、串并聯(lián)混合的復(fù)雜系統(tǒng)則難以模擬[4-5]。本文通過構(gòu)建簡單機(jī)構(gòu)的數(shù)學(xué)模型及機(jī)構(gòu)間的串并聯(lián)關(guān)系,以驅(qū)動件運動參數(shù)為自變量,逐層求解各個被動件運動表達(dá)式,可視化顯示任意時刻的艙門狀態(tài)。
1 系統(tǒng)介紹
1.1 飛機(jī)艙門開關(guān)機(jī)構(gòu)
飛機(jī)艙門開關(guān)機(jī)構(gòu)由凸輪手柄傳動機(jī)構(gòu)、鉸鏈臂機(jī)構(gòu)、鎖鉤開閉機(jī)構(gòu)等眾多子機(jī)構(gòu)組合而成[6-7],如圖2所示。本文研究對象艙門為外開式,整個開門過程包括艙門抬升和艙門平移兩個步驟[8]。打開后的艙門與機(jī)身平行,其機(jī)構(gòu)狀態(tài)如圖3所示。

圖2 艙門開關(guān)機(jī)構(gòu)主要組成部分

圖3 艙門開啟后狀態(tài)
1.2 Visual Components軟件系統(tǒng)
所采用的軟件系統(tǒng)為Visual Components軟件,簡稱VC。VC是全方位的數(shù)字化工廠仿真軟件,集離散物流仿真模擬、機(jī)器人離線編程以及PLC虛擬調(diào)試三大功能于一體。VC支持絕大多數(shù)的CAD格式文件導(dǎo)入,包含豐富的組件庫,具有獨創(chuàng)的PnP即插即用功能,可實現(xiàn)機(jī)構(gòu)組件的屬性、行為定義和運動仿真。
2 飛機(jī)艙門模型前處理
2.1 艙門CAD模型導(dǎo)入
飛機(jī)艙門一般是在Catia等專業(yè)建模軟件中創(chuàng)建,然后導(dǎo)入到VC軟件中。為防止結(jié)構(gòu)樹錯亂以及格式轉(zhuǎn)換問題,將Catia模型分為多個cgr格式部件結(jié)構(gòu),再導(dǎo)入VC軟件中。以艙門把手為例,在VC軟件界面中選擇導(dǎo)入“幾何元”選項,如圖4所示。在VC軟件的“建模”模塊,可以看到把手部件的結(jié)構(gòu)樹下包括多個子實體。由于后續(xù)整個把手保持相同的運動,需使用“組合”功能將把手對應(yīng)實體部分合并為一個實體,如圖5所示。

圖4 CAD零件導(dǎo)入VC界面

圖5 部件結(jié)構(gòu)幾何實體合并
2.2 機(jī)構(gòu)關(guān)節(jié)提取及層級確定
選擇把手合并后的實體并利用“提取鏈接”功能生成結(jié)構(gòu)關(guān)節(jié),它包含部件坐標(biāo)、部件名稱、部件偏移量以及關(guān)節(jié)屬性等屬性,如圖6所示。將把手作為主動驅(qū)動件,運動方式為旋轉(zhuǎn),將把手零件坐標(biāo)系調(diào)整至y軸與旋轉(zhuǎn)軸重合,此時旋轉(zhuǎn)方向為+y軸,新建伺服控制器Servo Controller來進(jìn)行驅(qū)動,關(guān)節(jié)名稱為J1。

圖6 把手關(guān)節(jié)提取與屬性編輯
艙門開關(guān)機(jī)構(gòu)是由眾多子機(jī)構(gòu)通過串并聯(lián)方式組合完成艙門的開啟和關(guān)閉。圖7為艙門鉸鏈臂子機(jī)構(gòu)層級圖。通過對多層級的機(jī)構(gòu)串并聯(lián)關(guān)系的分析,確定從動件運動的相對關(guān)系,才能夠理清艙門開關(guān)機(jī)構(gòu)工作機(jī)理,又有利于更高層級從動件運動表達(dá)式的求解。

圖7 艙門開關(guān)機(jī)構(gòu)整體層級表示
3 機(jī)構(gòu)關(guān)節(jié)運動表達(dá)式求解
3.1 凸輪曲柄機(jī)構(gòu)
圖8是由把手、內(nèi)凸輪部件、搖臂以及其他固定件組成的凸輪曲柄機(jī)構(gòu)。內(nèi)凸輪部件與手柄具有相同的運動狀態(tài)。第一階段由于內(nèi)凸輪前半部分圓弧與把手旋轉(zhuǎn)軸線一致,此時搖臂末端銷柱(與搖臂運動形式一致)保持不動;第二階段則驅(qū)使銷柱沿內(nèi)凸輪后半直線部分運動,表現(xiàn)為搖臂繞其軸線的旋轉(zhuǎn)運動。以下求解第二階段求解搖臂的運動表達(dá)式。

圖8 凸輪曲柄機(jī)構(gòu)
將凸輪曲柄機(jī)構(gòu)內(nèi)凸輪和搖臂投影到二維平面,如圖9所示,其中O1和O2分別為搖臂和內(nèi)凸輪的旋轉(zhuǎn)中心,以O(shè)2為圓心,O2O1為y軸建立坐標(biāo)系。第二階段初始狀態(tài)時,C點和A點分別為內(nèi)凸輪直線部分的起點和終點;當(dāng)把手旋轉(zhuǎn)一定角度J1(∠AO2B)時,C點和A點分別運動到E點和B點,此時銷柱由C點運動到D點,∠CO1D(記為θ)即為搖臂的旋轉(zhuǎn)角度。定義各個尺寸和間距如下:O1O2=h,O2C=O2E=R1,O2A=O2B=R2,O1C=O1D=R3,AC=BE=L,∠AO2C=∠BO2E=α,∠CO2O1=β。

圖9 凸輪曲柄機(jī)構(gòu)二維投影分析圖
通過圖9可以看出,θ的大小取決于線段CD的長度x,可以根據(jù)余弦定理求解,如式(1)所示。在VC軟件中,定義了三角函數(shù)sssad用來快速求解三角形參數(shù),則式(1)可以轉(zhuǎn)化為式(2)的形式。點C和點A的坐標(biāo)位置可通過測量固定長度項后計算獲得,如式(3)所示。
(1)
θ=sssad(x,R3,R3)
(2)
(3)
式(3)中的角度α和β為定值,可用尺寸參數(shù)計算獲得,如式(4)所示。
(4)
根據(jù)旋轉(zhuǎn)變換方法,銷柱從初始位置(xD,yD)隨搖臂轉(zhuǎn)動角度θ后,到達(dá)新的位置(x′D,y′D),二者存在式(5)所示關(guān)系,其中(x0,y0)為旋轉(zhuǎn)中心坐標(biāo)。
(5)
銷柱初始位置在AC連接的直線上,銷釘與搖臂旋轉(zhuǎn)中心的距離保持不變,即:
(6)
(7)
聯(lián)立方程式(5)、式(6)、式(7)即可求得第二階段搖臂旋轉(zhuǎn)角度θ隨把手轉(zhuǎn)角J1的數(shù)學(xué)表達(dá)式,而第一階段它的值為0,因此其運動方式為分段函數(shù),曲線如圖10所示。

圖10 搖臂隨把手轉(zhuǎn)動曲線圖
3.2 四連桿機(jī)構(gòu)
圖11是由搖臂AB、連桿BC和套筒CD組成的四連桿機(jī)構(gòu),在ABCD平面內(nèi),搖臂的轉(zhuǎn)動中心A和套筒的轉(zhuǎn)動中心D相對位置保持不變,初始狀態(tài)時四連桿長度a、b、c、d以及各邊之間的夾角都可以通過測量得到,t=0時刻搖臂AB與AD的夾角大小記為A0。當(dāng)搖臂AB驅(qū)動一定角度A(與3.1節(jié)的角度θ一致)時,問題轉(zhuǎn)化為求解連桿BC和套筒CD的對應(yīng)運動表達(dá)式。由于連桿BC繞B點運動角度參考對象為搖臂AB,因此連桿BC與搖臂AB間層級關(guān)系為串聯(lián);套筒CD繞D點運動角度參考對象為大地,因此套筒CD與搖臂AB間層級關(guān)系為并聯(lián)。
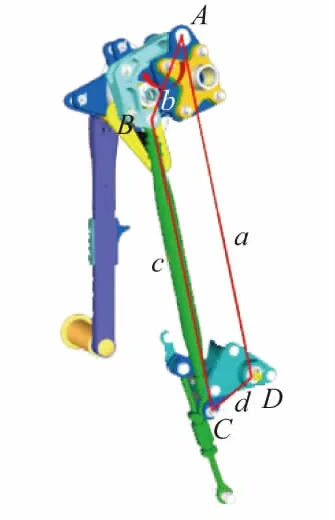
圖11 艙門提升四連桿機(jī)構(gòu)
四連桿機(jī)構(gòu)的運動求解主要是通過余弦定理,假設(shè)BD的長度為e,在運動過程中e的大小會隨著搖臂擺動角度而變化。當(dāng)搖臂轉(zhuǎn)動角度A時(此時搖臂AB與AD的實際夾角為A+A0),二者存在關(guān)系:
e=a2+b2-2·a·b·cos(A+A0)
(8)
連桿BC轉(zhuǎn)動角度B由∠DBA和∠DBC相加得到,因此可以求得其表達(dá)式,如式(9)所示。同理,套筒CD的轉(zhuǎn)動角度D表達(dá)式如式(10)所示。
(9)
(10)
在VC軟件中,定義了特定的函數(shù)sasssa1用來快速求解四連桿機(jī)構(gòu)參數(shù),連桿BC轉(zhuǎn)動角度B和套筒CD的轉(zhuǎn)動角度D可以表示為式(11)。
(11)
式中degree和radian分別是VC軟件中弧度轉(zhuǎn)角度和角度轉(zhuǎn)弧度的函數(shù)。
對于存在“交叉”現(xiàn)象的特殊四連桿結(jié)構(gòu)(圖12),由于使用余弦定理得到的表達(dá)式與式(8)和式(9)形式不一致,因此不能直接使用四連桿機(jī)構(gòu)計算函數(shù)sasssa1,可通過兩個三角函數(shù)sssad組合求解。
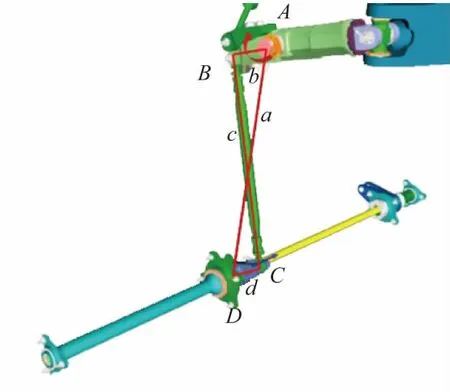
圖12 “交叉”四連桿機(jī)構(gòu)
在“交叉”四連桿機(jī)構(gòu)中,BD長度e與式(7)完全一致,連桿BC轉(zhuǎn)動角度B由∠DBA和∠DBC相減得到,同理,套筒CD的轉(zhuǎn)動角度D由∠BDC和∠BDA相減得到,將其用VC軟件自帶的sssad表示,如式(12)所示。
(12)
4 結(jié)語
本文利用簡單機(jī)構(gòu)的復(fù)合構(gòu)建了艙門開關(guān)機(jī)構(gòu)的數(shù)字化模型,以表達(dá)式形式準(zhǔn)確表示任意時刻機(jī)構(gòu)組成零部件的所在位置,實現(xiàn)艙門開關(guān)過程的可視化。結(jié)果表明:艙門提升臂、搖臂等關(guān)鍵結(jié)構(gòu)件隨把手轉(zhuǎn)動的角度與實際一致;且艙門提升高度以及平移幅度也與測量結(jié)果相同;證明了本文方法能夠準(zhǔn)確模擬飛機(jī)艙門開關(guān)情況。
