改進(jìn)的Kalman融合濾波算法在無(wú)人機(jī)避障系統(tǒng)中的應(yīng)用分析
2021-08-14 10:55:54杜天華徐金龍劉博章宇航許繼弘
科學(xué)與信息化 2021年21期
杜天華 徐金龍 劉博 章宇航 許繼弘
上海機(jī)電工程研究所 上海 201109
1 無(wú)人機(jī)避障
1.1 無(wú)人機(jī)避障方式
無(wú)人機(jī)避障方式多種多樣,主要包括機(jī)器視覺(jué)避障、激光超聲傳感器融合避障等,最近張京娟等提出了根據(jù)飛行器間測(cè)距信息對(duì)飛行器慣導(dǎo)定位進(jìn)行校正的方法[1]。機(jī)器視覺(jué)穩(wěn)定性較差不能適應(yīng)多變的飛行環(huán)境,基于成本考慮激光超聲傳感器融合避障應(yīng)用較廣。單一的傳感器存在較大的不穩(wěn)定性,無(wú)法滿足飛行階段障礙物測(cè)距的精度要求,需要采用多數(shù)據(jù)源融合技術(shù),獲得相對(duì)精確的信息數(shù)據(jù),得到可靠測(cè)距結(jié)果。針對(duì)無(wú)人機(jī)傳感器來(lái)說(shuō),信息融合算法較多,包括自適應(yīng)Kalman濾波和擴(kuò)展Kalman濾波,其中,自適應(yīng)Kalman濾波較為簡(jiǎn)單有效。為了提升無(wú)人機(jī)穩(wěn)定性,需要從信息融合算法入手,對(duì)Kalman濾波算法適當(dāng)改進(jìn)。
1.2 無(wú)人機(jī)避障系統(tǒng)
現(xiàn)階段的無(wú)人機(jī)已經(jīng)不再局限單一領(lǐng)域,除了軍事領(lǐng)域外,還廣泛應(yīng)用于民用,如何在復(fù)雜環(huán)境中,較為精準(zhǔn)到達(dá)預(yù)定目標(biāo),是業(yè)界討論的焦點(diǎn)。現(xiàn)實(shí)中,需要對(duì)飛行路徑完整優(yōu)化,借助細(xì)致算法,發(fā)揮自主避障功能,在此前提下,提升無(wú)人機(jī)應(yīng)用可靠性。研究發(fā)現(xiàn),動(dòng)態(tài)自主避障模型作用顯著,可以將碰撞判斷問(wèn)題分解和轉(zhuǎn)化,變更為一元二次方程,合理推算出最小碰撞時(shí)間,這樣便可以給實(shí)際飛行速度提供參考,遵循盡可能指向目標(biāo)的避障原則,獲得期望的運(yùn)動(dòng)速度(無(wú)人機(jī))[2]。需要注意的是,由于引入權(quán)重因子后,會(huì)改變自身套件,增加過(guò)載約束,減少速度判斷時(shí)間(最優(yōu)機(jī)動(dòng)速度)。
2 改進(jìn)的Kalman濾波算法
在經(jīng)濟(jì)的全方位帶動(dòng)下,飛行器技術(shù)相對(duì)成熟,飛行器品牌越來(lái)越多,在這樣的背景下,四旋翼飛行器逐漸普及,慢慢進(jìn)入大眾視野。但是該飛行器的應(yīng)用,存在較大安全隱患,撞機(jī)、墜機(jī)等事故概率較高,為了提高應(yīng)用水平,徹底改善飛行器避障系統(tǒng)問(wèn)題,可以引進(jìn)Kalman濾波改良算法,提高機(jī)身安全性。
Kalman濾波的基本理論:結(jié)合最小均方差法則,確定狀態(tài)方程和測(cè)量方程,根據(jù)觀測(cè)值和預(yù)測(cè)值完成數(shù)據(jù)實(shí)時(shí)迭代,更新模型中的參數(shù),得出最佳估計(jì)值。
無(wú)人機(jī)距離為一維數(shù)據(jù)量,其狀態(tài)轉(zhuǎn)移方程和測(cè)量方程可以描述為:

方程式中: 為狀態(tài)向量; 為觀測(cè)向量;A為狀態(tài)轉(zhuǎn)移矩陣;B為控制矩陣。除此之外,H為觀測(cè)矩陣;w則表示過(guò)程激勵(lì)噪聲; 為觀測(cè)噪聲。由Kalman濾波得基本假設(shè)可知:設(shè)

式中:Q表示過(guò)程激勵(lì)協(xié)方差矩陣; R則指觀測(cè)噪聲協(xié)方差矩陣;K為卡爾曼系數(shù)。K是Kalman濾波中最重要的參數(shù),K決定了測(cè)量值和預(yù)測(cè)值在最終估計(jì)值中的比重,R越小則證明測(cè)量值越精確,相應(yīng)的測(cè)量值在最終估計(jì)值中的比重也越大。在實(shí)際測(cè)量中,相關(guān)參數(shù)Q、R、q、r等會(huì)實(shí)時(shí)變化,不斷更新,并且想要準(zhǔn)確獲取難度較大,基于這樣的前提,建立的模型很難確保準(zhǔn)確性,與實(shí)際模型相差過(guò)大,導(dǎo)致傳感器測(cè)距效果并不理想,因此如何得到準(zhǔn)確的估計(jì)R值,同時(shí)使實(shí)際的R值盡可能小是提高測(cè)距精度的關(guān)鍵。采用改進(jìn)的Sage_Husa自適應(yīng)Kalman濾波可以降低R值不確定性帶來(lái)的影響。
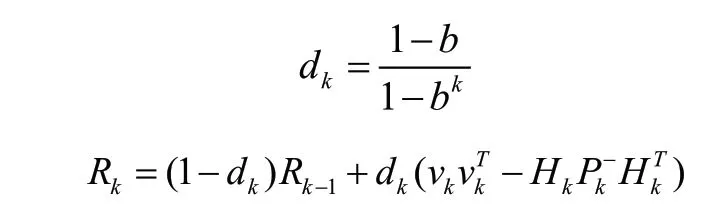
式中:b為遺忘因子,kd為由此得到的加權(quán)系數(shù)。b取值范圍為0~1,可見(jiàn)隨著濾波進(jìn)行,加權(quán)系數(shù)kd越來(lái)越小,kR更多地取決于 1kR?的取值,這一過(guò)程的快慢由遺忘因子b的取值決定。事實(shí)上遺忘因子的取值受很多因素的影響,可以通過(guò)實(shí)驗(yàn)實(shí)際測(cè)量得到不同情況下的最佳取值。
為了提高測(cè)距的可靠性,需要對(duì)傳統(tǒng)算法進(jìn)行改進(jìn),借助自適應(yīng)濾波,完成模型不斷修改、更新,從而使估計(jì)值收斂,通過(guò)算法的優(yōu)化,可以得到理想濾波結(jié)果。結(jié)合實(shí)踐經(jīng)驗(yàn)可知,常規(guī)的Kalman濾波,完成每次狀態(tài)量預(yù)估,都要花費(fèi)較多時(shí)間,參數(shù)Q、R、q、r在實(shí)際應(yīng)用中,采用的是前一環(huán)節(jié)的數(shù)值,因此四個(gè)量存在滯后性,這就會(huì)讓測(cè)距的準(zhǔn)確度降低,產(chǎn)生較大的誤差值,嚴(yán)重影響后驗(yàn)估計(jì)質(zhì)量,甚至引起發(fā)散。為了改變現(xiàn)狀,提高后驗(yàn)估計(jì)質(zhì)量,將Kalman濾波法和Sage_ Husa法進(jìn)行融合,可以根據(jù)加權(quán)系數(shù)進(jìn)行高質(zhì)量的參數(shù)更正,從而強(qiáng)化避障效果。
3 改進(jìn)的Kalman濾波器設(shè)計(jì)
隨著飛行器應(yīng)用領(lǐng)域擴(kuò)展,為了提高飛行器性能,完善其躲避障礙的功能,提高避障能力,需要基于改進(jìn)的Kalman濾波算法,對(duì)濾波器進(jìn)行優(yōu)化,確保濾波器性能穩(wěn)定,借此增強(qiáng)無(wú)人機(jī)避障能力。
以無(wú)人機(jī)測(cè)距這一場(chǎng)景為例,在傳感器內(nèi)部信息融合時(shí),需要輸入超聲波或者是激光傳感器測(cè)距信息,二者測(cè)量值為同一量綱,想要實(shí)現(xiàn)兩類(lèi)信息的融合,就要改變其中一個(gè)的量綱。在實(shí)際應(yīng)用中,我們將狀態(tài)值設(shè)定為x,并且將激光測(cè)距采樣值的導(dǎo)數(shù)設(shè)為u,作為濾波器的輸入量,將超聲波測(cè)距采樣值設(shè)為z,可得狀態(tài)空間方程以及應(yīng)用價(jià)值較高的測(cè)量方程:為采樣頻率。除此之外, wu與 wh分別代表激光和超聲波傳感器的測(cè)量噪聲。
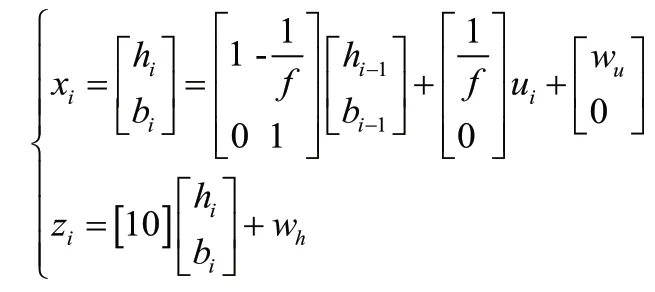
式中: ui為激光測(cè)距導(dǎo)數(shù)值速度;hi為超聲波測(cè)距值;f
為便于該方程式的實(shí)現(xiàn),現(xiàn)取 x = [h,b]T,h代表距離量,b為常數(shù),也就是在實(shí)際測(cè)量過(guò)程中,激光測(cè)距產(chǎn)生的測(cè)量偏差。實(shí)際應(yīng)用中由于天氣或者周?chē)瓷涮匦缘牟煌す鉁y(cè)距和超聲波測(cè)距的誤差會(huì)隨之改變。通過(guò)調(diào)節(jié)遺忘因子即可巧妙地改變兩種濾波器在融合后的測(cè)量噪聲R中的比例,激光測(cè)距誤差小時(shí),b較小,使得測(cè)量噪聲R主要反應(yīng)激光測(cè)距的噪聲;反之超聲波測(cè)距效果好時(shí),b一般偏大,這樣就可以通過(guò)融合激光和超聲波測(cè)距兩種方式來(lái)提高測(cè)量噪聲R的準(zhǔn)確性,從而降低Kalman濾波發(fā)散的可能性,提升測(cè)距精度。
從無(wú)人機(jī)融合超聲波和激光測(cè)距來(lái)提升測(cè)距精度優(yōu)化濾波輸出,我們可以得到啟發(fā),在測(cè)量同一物理量時(shí),都可以考慮應(yīng)用這一方法將多個(gè)測(cè)量手段綜合起來(lái)以提高整體測(cè)量的精度,在實(shí)際應(yīng)用中可以通過(guò)實(shí)驗(yàn)得到不同場(chǎng)景下合適的遺忘因子取值,這樣在遇到特定場(chǎng)景時(shí)即可靈活切換,自適應(yīng)改變Kalman參數(shù),優(yōu)化濾波器性能。
在Kalman濾波器設(shè)計(jì)中,需要對(duì)原Kalman濾波器進(jìn)行功能上的完善與性能上的優(yōu)化,由于原Kalman濾波器使用受到限制,經(jīng)常狀態(tài)估計(jì)不準(zhǔn),甚至在實(shí)際應(yīng)用中,會(huì)出現(xiàn)發(fā)散現(xiàn)象。為了避免此類(lèi)問(wèn)題,需要持續(xù)優(yōu)化原有的Kalman濾波器,在原有性能結(jié)構(gòu)基礎(chǔ)上進(jìn)行改良,實(shí)際操作中,借助簡(jiǎn)化的Sage_ Husa法,完成對(duì)原濾波器的性能修正[3]。實(shí)踐證明,改進(jìn)的Sage_ Husa濾波器性能穩(wěn)定,在原濾波器中引入了加權(quán)系數(shù)d(遺忘因子的),通過(guò)這樣的改進(jìn),可以提升濾波器穩(wěn)定性,使其隨迭代變化,在測(cè)距方面更加精準(zhǔn),從而強(qiáng)化濾波器的應(yīng)用效果,為避障系統(tǒng)功能發(fā)揮提供保障。
4 實(shí)例應(yīng)用分析
隨著無(wú)人機(jī)用途的增多,應(yīng)用領(lǐng)域不斷擴(kuò)張,無(wú)人機(jī)可以輔助完成高難度的信息收集以及監(jiān)測(cè)工作,運(yùn)行效率較高。現(xiàn)實(shí)應(yīng)用中,想要完善無(wú)人機(jī)的功能,就必須從避障系統(tǒng)優(yōu)化入手,通過(guò)增強(qiáng)避障功能,確保無(wú)人機(jī)性能穩(wěn)定。超聲波測(cè)距避障系統(tǒng)在現(xiàn)實(shí)應(yīng)用中,分為三個(gè)步驟:①借助模塊測(cè)量距離(空間陣列超聲波模塊)對(duì)前方的障礙物精準(zhǔn)判斷。其原理是首先利用電調(diào),將其作為最為關(guān)鍵的供電模塊,在此前提下,使用芯片驅(qū)動(dòng)超聲波完成想要的距離探測(cè),這是最為關(guān)鍵的步驟,不容忽視。模塊上電前,需要確保模塊處于理想的串口觸發(fā)模式,只有這樣,才能讓輸入信號(hào)立即發(fā)揮作用,發(fā)出超聲波脈沖,基礎(chǔ)搭建完成后,便可以進(jìn)行回波信號(hào)檢測(cè)。在整個(gè)過(guò)程中,會(huì)對(duì)溫度值進(jìn)行測(cè)量,結(jié)合實(shí)際溫度需求進(jìn)行校正,最終保證輸出距離結(jié)果的精準(zhǔn)。②飛控中的芯片作用顯著,根據(jù)接收數(shù)據(jù)以及科學(xué)設(shè)定的距離,可以提出最佳決策方案。③最后一步是根據(jù)操作指令(現(xiàn)實(shí)中操作員發(fā)出的)以及相關(guān)報(bào)警信號(hào),作出合理的綜合決策。研究發(fā)現(xiàn),在實(shí)際操作中,人員的操作指令不容忽視,往往會(huì)和報(bào)警信號(hào)一起,穿越組合的傳輸門(mén),完成最后的決策,實(shí)際操作中,需要結(jié)合現(xiàn)實(shí)需求,針對(duì)不同安全距離,制定合理性較高的控制策略,在此基礎(chǔ)上,發(fā)揮智能的綜合避障作用。
通過(guò)上述分析了解到,無(wú)人機(jī)避障系統(tǒng)功能強(qiáng)大,涉及內(nèi)容較多,想要實(shí)現(xiàn)避障系統(tǒng)的優(yōu)化,必須進(jìn)行精準(zhǔn)的測(cè)量,對(duì)原有的算法進(jìn)行完善,將Kalman濾波法和Sage_ Husa法進(jìn)行融合,實(shí)踐表明,該算法的融合意義非凡,可以根據(jù)加權(quán)系數(shù)完成優(yōu)質(zhì)的參數(shù)更正,從而增強(qiáng)避障系統(tǒng)功能,強(qiáng)化避障效果,消除無(wú)人機(jī)飛行的隱患。現(xiàn)實(shí)中的主要方法是:在算法中合理引進(jìn)遺忘因子,在此基礎(chǔ)上進(jìn)行校正,將其和Kalman濾波算法融合,得出最佳的計(jì)算方案,完成對(duì)Kalman的簡(jiǎn)化,借助算法的改進(jìn),增強(qiáng)避障系統(tǒng)的適應(yīng)性,為無(wú)人機(jī)應(yīng)用效果改善助力,提高其操作水平。
5 結(jié)束語(yǔ)
綜上所述,在現(xiàn)實(shí)應(yīng)用中,無(wú)論是激光傳感器還是較為常見(jiàn)的超聲波傳感器,當(dāng)進(jìn)行不同障礙物的測(cè)距時(shí),都會(huì)出現(xiàn)一定測(cè)量誤差,并且測(cè)距結(jié)果非常不穩(wěn)定,為了改善這方面的問(wèn)題,可以將先進(jìn)的Sage_Husa自適應(yīng)法與目前使用的Kalman濾波器進(jìn)行融合,完成相關(guān)參數(shù)的優(yōu)化。現(xiàn)實(shí)表明,兩者的數(shù)據(jù)融合具有一定前瞻性,可以有效改善傳統(tǒng)數(shù)據(jù)采集不穩(wěn)定的問(wèn)題,提高數(shù)據(jù)采集精度,保持穩(wěn)定測(cè)量結(jié)果,在此基礎(chǔ)上降低測(cè)量誤差,為無(wú)人機(jī)性能提升奠定基礎(chǔ)。
猜你喜歡
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
無(wú)線電工程(2020年11期)2020-10-29 01:25:46
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45