機車走行部電務設備智能檢測診斷系統研究與設計
2021-08-17 08:46:54閆曉莉
鐵道通信信號 2021年7期
閆曉莉
隨著高速客運列車、重載貨運列車的開行,帶動了鐵路運輸技術的一系列變革。在高速運行狀態下,任何細小、細微的故障都有可能引發重大事故,因此提高機車在運營與檢修狀態下部件狀態的檢測和異常預警,對提高檢修運用質量至關重要[1]。在現有的檢測手段中,電務車載設備自動檢、周期檢雖已實現對車上設備全覆蓋自動化檢查,但對車底設備還主要依靠人眼識別,主觀性較強,且對環境適應性差、效率低[2]。
為解決機車車底設備檢測診斷手段不足的問題,鄭州電務段進行了深入調研,并委托北京思維鑫科信息技術有限公司聯合開發研制了一套機車走行部電務設備智能檢測診斷系統(以下簡稱“檢測系統”),改變了單獨人工作業方式,提高了故障檢查的可靠性;做到全方位檢查,減輕室外作業勞動強度;基于深度學習、圖像對比的方式,識別車載設備狀態,客觀性和準確性明顯提高,隨時可以掌握設備的質量情況,為機車車底設備可視部件的科學維護提供了可靠的依據,成本低,可廣泛推廣使用。
1 檢測系統整體實現方案
檢測系統由前端采集控制子系統(硬件)和故障圖像自動識別子系統(軟件)2部分組成。硬件包括車號自動識別系統和圖像自動采集設備,可完成車號自動識別和圖像自動采集;軟件包括圖像智能識別軟件、數據存儲軟件和展示客戶端軟件等,采用光流圖像測速、光學成像、聯動控制、圖像識別與對比等關鍵技術,通過計算機深度學習,實現了車底設備的故障圖像智能分析。檢測系統整體實現方案見圖1。
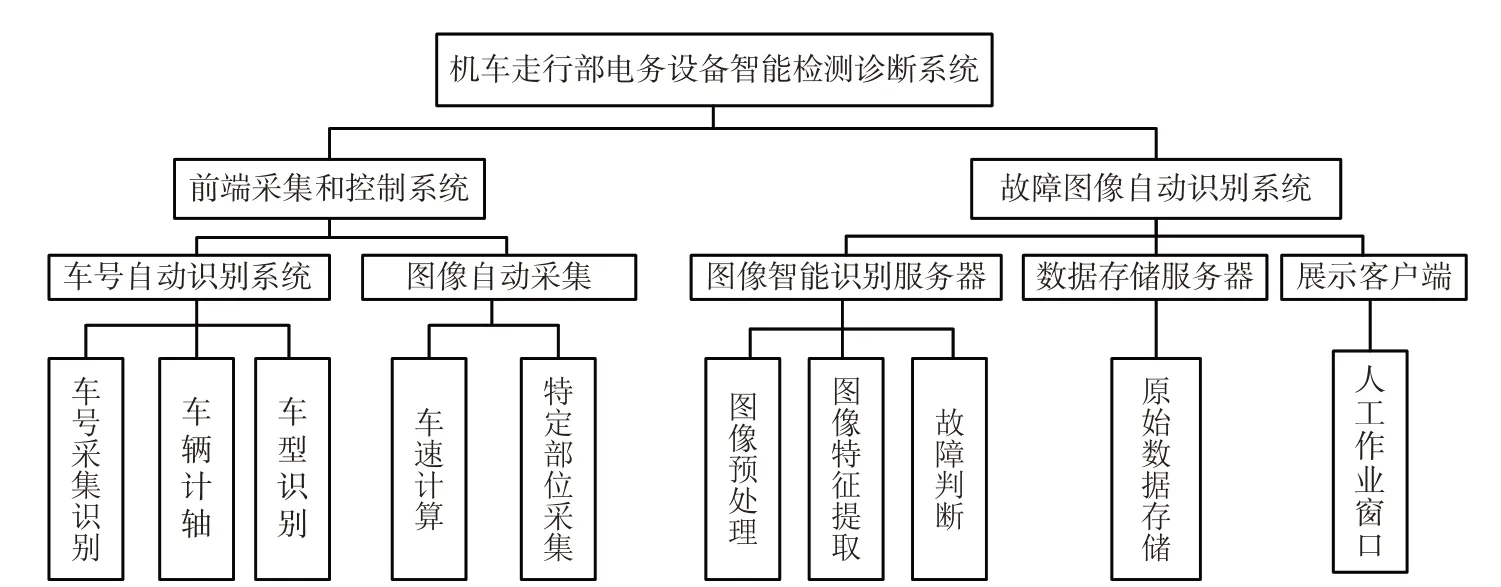
圖1 檢測系統整體實現方案
2 前端采集控制子系統
前端采集控制子系統是對機車速度、車號、車型進行判斷,進而控制補償光源和防護設備的開啟和關閉,為攝像機的保護設備、除塵設備、攝像機參數自動調整等提供控制信息;同時根據機車速度、機車位置控制攝像機進行圖像采集、傳輸和處理,完成機車在非勻速狀態下的圖像拼接與修正,處理電務專業所關注設備(如電子標簽、機感線圈、速度傳感器、接線盒等)的高清圖像信息。
2.1 硬件設備
前端采集控制子系統的硬件設備主要由高速攝像機、補償光源、防護設備、車號識別系統、測速系統、圖像采集計算機、控制計算機、電氣控制箱、交換機等組成,見圖2。其中,采集設備的數據和控制信息通過千兆網絡與前端控制設備進行數據交互;控制設備采集的圖像數據通過光纖傳輸至檢測中心設備。

圖2 檢測系統硬件架構
2.2 控制模塊
前端采集控制子系統控制模塊集成檢測車號識別系統子模塊、磁鋼信號檢測子模塊、核心控制模塊、信息收發模塊等功能,通過車號識別系統提供的車型和車號信息,再匯集磁鋼信號檢測子模塊采集并計算輸出的車速及機車位置信息,并根據系統狀態由核心控制模塊輸出相關的控制信號至防護設備模塊和攝像機控制信號模塊,最終由信息收發模塊通過LAN與中心服務器進行信息通信。控制模塊信息流程設計見圖3。

圖3 控制模塊信息流程
2.3 邏輯處理模塊
前端采集控制子系統在運行過程中由邏輯處理模塊處理自鎖狀態、預備狀態和接車狀態,各狀態切換過程邏輯見圖4。

圖4 系統狀態切換邏輯
自鎖狀態為系統的保護狀態,該狀態下保護裝置處于保護位,系統實時監測各磁鋼狀態。需要特殊說明的是:自鎖狀態可視為系統的缺省狀態,無論系統處于哪個工作狀態下,只要系統出現自檢故障均跳轉至自鎖狀態,然后再對外進行故障報警,維護人員可進行遠程/人工故障排除。
預備狀態下,各控制繼電器元件處于使能位,攝像機、LED電源處于上電預備工作狀態,隨時準備接車;當預備磁鋼處于激活狀態后,系統進入預備狀態等待,在一定時間內若接車磁鋼處于激活狀態后,系統進入接車狀態,各種設備開始工作。
3 故障圖像自動識別子系統
故障圖像自動識別子系統由檢測中心服務器及圖像自動識別軟件構成,主要完成采集圖像的數據運算、智能對比和異常報警等;存儲機車的車號信息、歷史圖像數據、異常圖像數據等,同時與前端采集和控制設備進行數據通信;采用Web客戶端做最終的客戶應用展示。
3.1 硬件設備
故障圖像自動識別子系統硬件設備主要由圖像識別服務器、圖像數據服務器、交換機、Web客戶端等設備組成。其中圖像識別服務器用于檢測中心系統,其硬件架構見圖2。
3.2 軟件實現
故障圖像自動識別子系統軟件主要實現入庫機車圖像傳輸、預處理、圖像智能分析、故障判斷、圖像存儲、檢索、瀏覽、操作等功能;圖片智能分析、故障判斷利用深度學習技術識別異常圖片并進行標記,方便維護人員進行核實和查驗;數據庫系統采用MySQL,主要用來存儲系統配置信息和業務邏輯數據,如檢測結果、報警時間、圖片索引等[3]。主要軟件模塊如下。
3.2.1 圖像采集存儲模塊
圖像采集將機車走行部圖像數據存儲在MongoDB+GridFS分布式集群中,通過文檔key來索引[4];圖像存儲采用MongoDB文檔數據庫,存儲二進制圖像數據,使用GridFS基于MongoDB來持久存儲文件,并且支持分布式應用(文件分布存儲和讀取)。
3.2.2 圖像智能識別模塊
圖像智能識別模塊采用Single-stage目標檢測算法。該算法具有獨特的實時識別能力和高檢測精度。與常見的預訓練策略相反,采用從頭開始訓練的檢測模型,其優點是可以減少分類和定位之間的任務偏差,尤其是在重疊閾值較高的情況下。但是,與基于典型的微調模型相比,從頭開始訓練的檢測模型需要大量的訓練時間。為此,系統引入了一個Single-stage檢測框架,結合了微調預訓練模型和從頭開始訓練的優點[5],采用單個Titan X GPU來實現圖像智能識別。該模塊重點對電務車載設備的以下項點進行專項識別。
1)Ⅰ、Ⅱ端機車信號感應器安裝緊固程度,包括螺栓、螺帽、開口銷、開口銷劈開角度等。
2)引入電纜(導線)固定,包扎良好無破損、護套完整。
3)主、備速度傳感器安裝牢固,螺栓、平墊、彈簧墊齊全;接插件、導線、綁扎狀態良好。
4)電子標簽安裝牢固,螺栓、平墊、彈簧墊齊全;接插件、導線、綁扎狀態良好。
3.2.3 Web客戶端展示模塊
Web前端采用HTML 5+JavaScript實現,通過HTML構造用戶交互界面;JS客戶端通過網絡訪問后臺接口服務,向后臺接口服務發出數據請求并接收反饋的數據,在IE瀏覽器中進行顯示。客戶端支持Windows操作系統,無需安裝任何其他應用軟件,只需使用Windows自帶的IE瀏覽器[6-7]。
Web應用軟件實現客戶端瀏覽、檢索和查詢機車圖像信息,并記錄操作人員的操作記錄等。
軟件交互界面主要分為控制區、用戶管理區、檢測狀態區、列車信息區、反饋信息區、硬件狀態區及備用區等,其具體功能如下。
1)控制區:實現系統控制以及數據導入/導出處理,包括配置系統參數、遠程故障診斷和控制等功能。
2)用戶管理區:主要為系統用戶的管理,并呈現當前用戶的各種狀態。
3)列車信息區:實現按照位置及車型進行篩選,并增加按機車號查詢等功能。
4)檢測狀態區:當滿足篩選條件后,檢測狀態區可呈現各項檢測點的檢測狀態;雙擊各檢測點,可調取故障圖像進行故障復核。
5)反饋信息區:反饋當前系統正在進行的工作,使操作人員能夠一目了然。
6)硬件狀態區:反饋當前系統的自檢狀態、磁鋼狀態等,可根據需要進行添加或減少狀態顯示。
4 系統調試運用
4.1 系統硬件部署
系統硬件整體部署于鄭州機務段段內機車入庫咽喉區,現場部署框圖見圖5。

圖5 系統現場安裝部署框圖
系統采用G3-GM11-M2420的工業攝像頭配合力凌鏡頭來進行圖像數據的采集,可獲得2 448×2 048分辨率,30 fps幀率的視頻圖像;采用千兆網卡進行數據傳輸;用標準磁鋼進行機車來車預警、觸發相機和機車測速;采用波長為647~700 nm紅光補光燈進行攝像補光;自主設計相機防護沉箱和側箱,及24 V的開箱控制電機;采用帶空調的軌旁機柜來保證軌旁控制設備的運行穩定性;采用光纖進行軌旁采集的圖像數據與存儲服務器之間的通信。
4.2 系統軟件調試
在基建及硬件設備部署到位后,先進行了系統的整體聯調,分別對電源、通信光纖、LVDS端口線、攝像機網線、攝像機電源、補光燈、防護箱電機、車號識別系統等線纜進行連接和調試;確認無誤后,再進行前端控制與采集系統的調試,檢查車號車型識別、車軸計軸、車速計算、圖像采集等數據的聯動試驗。根據現場圖像自動采集設備拍照質量,調節補償光源亮度、角度和閃光時間;調整工業攝像機的光圈大小、快門時間和焦距等參數。
在系統硬件調試完畢的基礎上,再進行軟件調試。該部分主要加強軟件智能計算模型訓練和機器模型的自學習。
在調試過程中,發現如下問題需重點關注和解決。
1)因環境為有砟股道,在現場應用的過程中,陽光干擾、水汽霧氣、灰塵等因素造成了攝像機成像效果的不穩定,為此需要根據所選用的高速攝像機,進行補償光源、異物水汽清掃風機等設備的匹配,并進行聯調聯試。
2)現場應用過程中,各種設備的應用時序需緊密配合,尤其是防護設備箱、補償電源、攝像機與風機的聯動控制是關鍵技術之一。
3)在補光燈調試中,因車底部分空間為鏤空(即沒有輪對遮擋),雙方側箱補光燈發出的頻閃光源會導致對側相機過曝光,需在控制補光燈頻閃時,錯開相機拍攝時間與補光燈頻閃時間。
4)補光燈選型時,因拍攝物體為深色金屬,為保證成像效果,經試驗驗證,采用640~700 nm波長的紅光補光燈成像效果最好。
為實現故障圖像的異常報警,其中關鍵的一步是被對比圖像與智能學習比對的模型圖像之間的配準,而配準的主要目的是消除圖像采集過程中由于車速、天氣、光線、抖動等外部因素造成的圖像不一致,實現歸一化。
5 系統實現效果
1)改善檢測人員的工作條件,減輕室外作業勞動強度,提高檢測質量。系統部署后,檢測人員可以由單獨的“室外檢查”改為“室內室外聯檢”。作業人員先利用系統去查看設備狀況,發現可疑點后,再有針對性地下車底檢查設備狀態。經統計分析,每臺機車平均作業時間可以由25 min縮短至8 min,作業時間減少68%。
2)視頻可檢索與定位播放,便于對故障設備進行復檢和追溯。系統設計時,按照設備檢測視頻存儲時間不少于6個月,故障圖像保存不少于5年的要求,檢測人員可以隨時進行檢索和回放。
3)對檢測出的故障數據自動進行統計,便于進行大數據挖掘,為周期檢提供依據。系統按車型、修程、故障時間等對故障數據進行統計并匯總,提取有效數據,形成高價值信息,生成有效的分析處理結果;為相關設備檢測周期的確定提供數據支撐,保障風險可控。
4)系統后續將逐步實現智能診斷的功能,可進一步降低檢測人員的工作強度。根據數據庫中存儲的機車圖像歷史數據,利用深度學習的算法不斷進行學習、反饋、更新的迭代訓練過程,不斷地提高系統適應能力,實現智能診斷功能。通過對比分析當前采集到的圖像數據,利用智能診斷找出可疑設備異常點,經檢測人員再上車進行確認和處理,可進一步降低檢測人員的工作強度。
6 結語
機車走行部電務設備智能診斷檢測系統具有結構合理、功能齊全、人機交互友好,實用性強等特點,它的成功研制與應用,改變了原有機車入庫檢測作業的工作模式,實現了車底設備的遠程識別和智能診斷,目前該系統已在現場穩定運行。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
汽車維修與保養(2019年7期)2020-01-06 03:30:42
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年11期)2018-08-04 03:26:08
汽車維護與修理(2016年10期)2016-07-10 08:17:41
工業設計(2016年12期)2016-04-16 02:52:00
汽車維修與保養(2015年6期)2015-04-17 03:31:50
