無人天車防撞系統(tǒng)的研發(fā)
2021-08-17 13:54:07安樂新
軟件 2021年3期
摘 要:本文主要介紹了無人天車防撞系統(tǒng)的研發(fā),包括硬件構(gòu)成、通訊、手動防撞、自動防撞。自動防撞功能細(xì)分為一級防撞功能、二級防撞功能、地面站防撞功能。防撞功能基于PLC實現(xiàn),兩車間的實時距離與每部天車在庫區(qū)中的實時位置依靠激光測距傳感器測量,天車PLC采集激光測距傳感器的數(shù)值,經(jīng)過程序計算并轉(zhuǎn)化成實際的距離。系統(tǒng)的研發(fā)能夠有效避免無人天車在任意狀態(tài)時發(fā)生相撞事故,保障天車以及現(xiàn)場人員的安全。
關(guān)鍵詞:無人天車;地面站;手動防撞;自動防撞
中圖分類號:TP273 文獻(xiàn)標(biāo)識碼:A DOI:10.3969/j.issn.1003-6970.2021.03.028
本文著錄格式:安樂新.無人天車防撞系統(tǒng)的研發(fā)[J].軟件,2021,42(03):100-102
Research and Development of Unmanned Crane Anti-collision System
AN Lexin
(Tangshan Iron & Steel Group Will Automation Co., Ltd., Tangshan? Hebei? 063000)
【Abstract】:This paper mainly introduces the research and development of unmanned crane anti-collision system, including hardware composition, communication, manual anti-collision, automatic anti-collision. Automatic anti-collision function is subdivided into primary anti-collision function, secondary anti-collision function, ground station anti-collision function. The anti-collision function is realized based on PLC. The real-time distance of the two workshops and the real-time position of each crane in the storage area are measured by the laser range finder. The PLC of the crane collects the value of the laser range finder, which is calculated by the program and converted into the actual distance. The research and development of the system can effectively avoid the collision accident of the unmanned crane in any state and guarantee the safety of the crane and the personnel on site.
【Key words】:unmanned crane;earth station;manual collision avoidance;automatic collision avoidance
0引言
目前,無人天車技術(shù)普遍應(yīng)用于鋼鐵行業(yè),尤其是在鋼卷庫當(dāng)中,無人天車承擔(dān)著自動下線、自動過跨、自動上線、自動裝車、自動打包等任務(wù)。無人天車代替了以往人工吊卷的方式,節(jié)省了大量的人力成本,同時在效率上也有著明顯的提高。多部無人天車在同一跨間同時作業(yè)時,需要考慮兩車間的防撞系統(tǒng)。防撞系統(tǒng)作為無人天車系統(tǒng)的重要一環(huán),兩車間的防撞距離過大,會影響無人天車的整體運行效率;當(dāng)防撞距離過小,則有可能發(fā)生兩車相撞事故。無人天車運行速度較快,如果兩臺天車相撞的話勢必會造成嚴(yán)重的安全事故,甚至威脅庫區(qū)人員的生命。因此,為了滿足無人天車運行時的安全性,必須合理地設(shè)定兩車間的防撞距離,研發(fā)一種較全面的防撞系統(tǒng)。防撞系統(tǒng)的研發(fā)對于無人天車在庫區(qū)中能夠平穩(wěn)運行起著重要的作用。
1硬件構(gòu)成
無人天車防撞系統(tǒng)硬件構(gòu)成包含:天車PLC、激光測距傳感器、反光板、地面PLC、無線通訊設(shè)備、交換機、編程電腦等。無人天車PLC和地面PLC采用西門子300系列,天車PLC通過西門子位置檢測模塊采集激光測距的數(shù)值,型號為:6ES7 338-4BC01-0AB0。無人天車PLC安裝在天車電氣室中,包含PS電源模塊、CPU、CP343-1、CP341、AI模塊、SM338等。
地面PLC安裝在地面站電氣室,包含PS電源模塊、CPU、CP343-1、DI模塊、DO模塊、DP_Coupler等。無線通訊設(shè)備安裝在AP箱和無線客戶端中,AP箱安裝在天車平臺,無線客戶端安裝在天車車體。無線通訊設(shè)備包含西門子SCALANCE W734-1 RJ45模塊、SCALANCE W774-1 RJ45模塊、天線、散熱風(fēng)扇、穩(wěn)壓電源等裝置[1]。
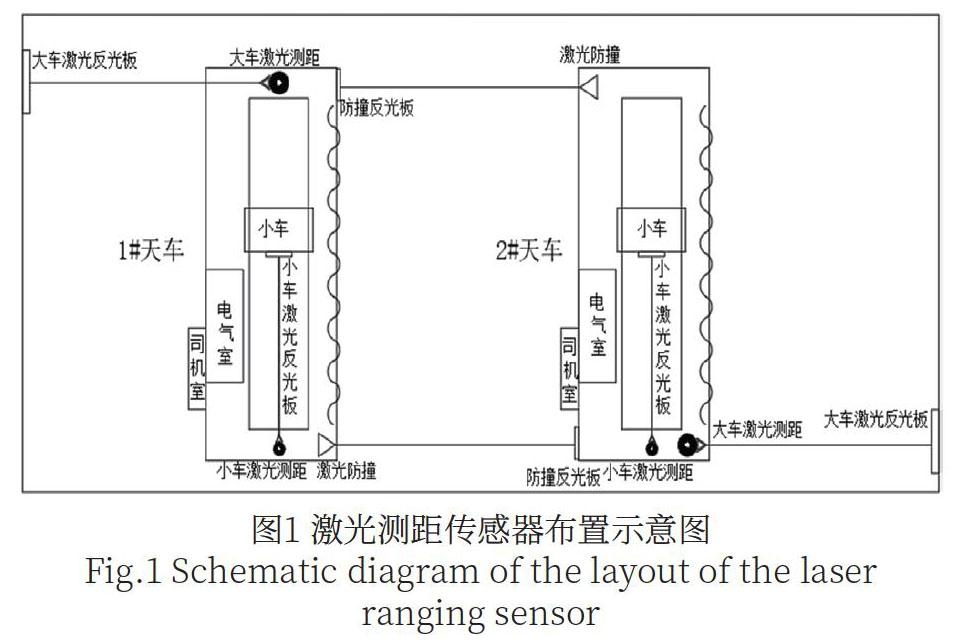
激光測距傳感器安裝在天車車體上,具體安裝方式如圖1所示,1#天車和2#天車車體分別安裝大車激光測距傳感器、激光防撞傳感器,在跨的邊緣安裝大車激光反光板,車體邊緣安裝防撞反光板。激光測距傳感器發(fā)射的激光照射到反光板上,可以直接測出對應(yīng)的發(fā)射距離,在激光測距傳感器面板上可以顯示實際的數(shù)值。PLC采集激光測距的數(shù)值,通過程序邏輯運算可以算出大車當(dāng)前的實際位置以及兩車間的實際距離。
2通訊
無人天車防撞系統(tǒng)在自動狀態(tài)下包含一級防撞功能、二級防撞功能、地面站防撞功能。二級防撞功能基于天車一級PLC與無人庫區(qū)二級系統(tǒng)通訊實現(xiàn),功能體現(xiàn)在無人庫區(qū)二級系統(tǒng)。地面站防撞功能基于天車一級PLC與地面站PLC通訊實現(xiàn),功能體現(xiàn)在地面站PLC。系統(tǒng)涉及的通訊包括天車PLC與無人庫區(qū)二級系統(tǒng)的通訊、天車PLC與地面站PLC的通訊、天車PLC與現(xiàn)場激光測距傳感器的通訊。在庫區(qū)中實現(xiàn)無線網(wǎng)絡(luò)全覆蓋,網(wǎng)絡(luò)采用5G頻段。將天車PLC、無人庫區(qū)二級系統(tǒng)、地面站PLC的IP地址設(shè)置在同一個網(wǎng)段,該網(wǎng)段屬于無人天車系統(tǒng)獨立的網(wǎng)絡(luò),不能和產(chǎn)線在同一網(wǎng)段。
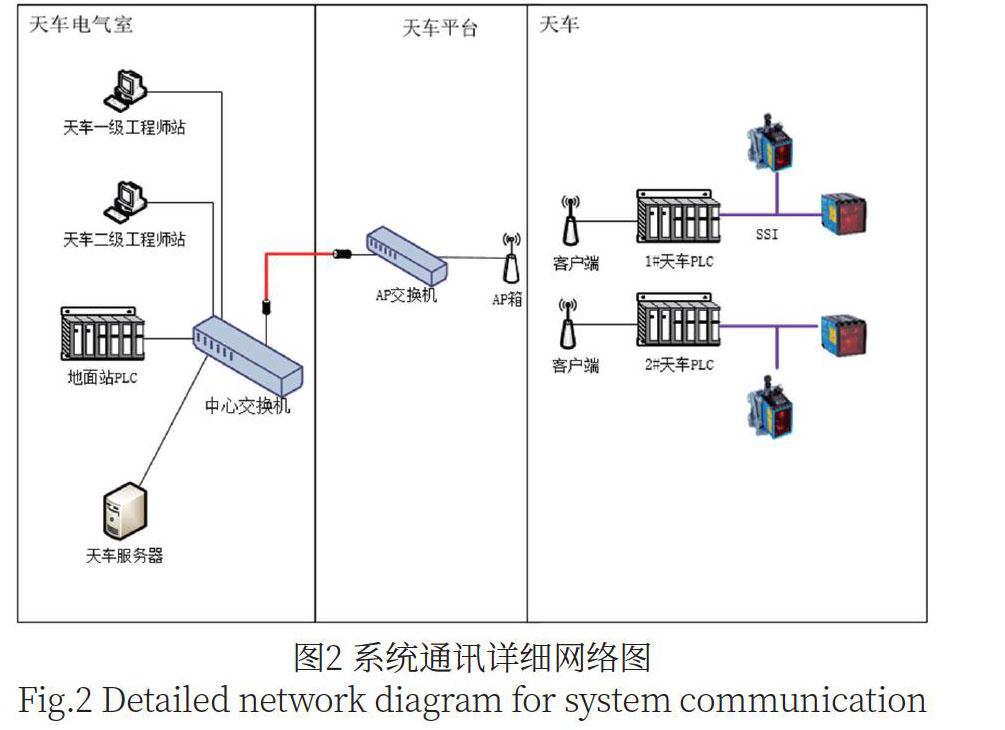
系統(tǒng)詳細(xì)網(wǎng)絡(luò)圖如圖2所示,天車PLC中CP343-1模塊通過以太網(wǎng)連接到無線客戶端SCALANCE W734-1 RJ45模塊,并分別為其分配IP地址。AP箱中的SCA LANCE W774-1 RJ45模塊通過以太網(wǎng)連接到AP交換機,并為其分配IP地址。AP交換機通過光纖連接到地面天車電氣室中的中心交換機。天車服務(wù)器、二級系統(tǒng)工程師站、無人天車一級工程師站、地面站PLC通過以太網(wǎng)連接到交換機。天車PLC中的SM338模塊通過SSI通訊采集激光測距傳感器的數(shù)值,經(jīng)過CPU邏輯運算,最終轉(zhuǎn)化為天車在庫區(qū)中的實際位置和兩車間的實時防撞距離。
3手動防撞
天車模式共分為四種模式,分別為自動模式、有人模式、遙控模式、維修模式。自動模式即無人模式,天車會自動執(zhí)行工單,不需要操作人員的控制;有人模式指的是天車工在駕駛艙通過檔桿、按鈕手動操控天車運行;遙控模式下駕駛艙可以無人,天車工在地面手持遙控裝置便可操控天車運行;維修模式屬于純硬線控制,該模式下脫離了PLC的直接控制,因此,在維修模式下不需要增加天車間的防撞功能。
為了天車以及人員的安全,無人天車在自動模式、有人模式、遙控模式下運行時需要投入防撞功能。手動防撞是在有人模式和遙控模式下的功能。首先分別測試兩臺天車的制動性能,算出天車在全速狀態(tài)下突然急停時大車滑行的距離,經(jīng)過多次測試選出最大的滑行距離。兩臺天車的最大滑行距離即為理想狀態(tài)下兩臺天車的手動防撞距離。當(dāng)天車的防撞激光數(shù)值到達(dá)設(shè)定的防撞距離時,天車大車撤出速度給定。在測試階段,如果兩臺天車硬件信息一致,盡量使其最大滑行距離趨于一致。如果不一致,考慮機械問題和變頻器參數(shù)設(shè)定是否有差異。實際運行過程當(dāng)中為了安全起見,需要加上一段安全補償距離。
4自動防撞
自動防撞即無人天車在自動狀態(tài)下的防撞功能,細(xì)分為:一級防撞功能、二級防撞功能和地面站防撞功能。
一級防撞功能:一級防撞功能通過無人天車PLC采集激光防撞傳感器的數(shù)值,當(dāng)數(shù)值達(dá)到設(shè)定的防撞距離時天車將暫停。具體實施過程如下:
(1)無人天車切換到自動模式,無人天車PLC接收到來自無人庫區(qū)二級系統(tǒng)下發(fā)的移動工單后,無人天車將向指定的目標(biāo)位置移動,待天車達(dá)到全速時,在二級畫面點擊暫停按鈕,無人天車一級PLC接收到暫停命令后,天車設(shè)定速度瞬間為零,算出在自動狀態(tài)下天車從高速到停止的滑行距離。以這種方式分別測算出兩臺天車的滑行距離,假設(shè)滑行距離分別為S1和S2。
(2)手動狀態(tài)下將兩臺天車防撞柱緊緊貼在一起,算出貼在一起后激光防撞數(shù)值。此時的防撞數(shù)值分別設(shè)為D1和D2,數(shù)值選擇大值。
(3)假設(shè)D1>D2,安全補償值為D_offset,自動狀態(tài)下天車的防撞距離D=S1+S2+D1+D_offset。反之,D=S1+S2+D2+D_offset。
參考圖1,天車自動狀態(tài)下,2#天車處于靜止?fàn)顟B(tài),1#天車朝2#天車運行時,當(dāng)1#天車的實際防撞數(shù)值小于防撞距離D時,1#天車將暫停。2#天車開出防撞距離后,1#天車可繼續(xù)執(zhí)行工單;1#天車和2#天車相向行駛時,兩臺天車實時采集各自的防撞距離,當(dāng)達(dá)到防撞距離后天車將分別暫停,避免兩車相撞事故發(fā)生。
二級防撞功能:二級防撞功能通過無人庫區(qū)二級系統(tǒng)來實現(xiàn),在二級系統(tǒng)里判斷是否到達(dá)防撞范圍,防撞距離需設(shè)定在二級系統(tǒng)。如果到達(dá)防撞范圍,二級向無人天車PLC發(fā)送暫停命令。通過無人天車PLC與無人庫區(qū)二級系統(tǒng)的通訊,二級將接收來自無人天車PLC發(fā)送的大車實時位置,大車的實時位置通過大車激光測距傳感器實現(xiàn),兩臺天車初始階段需要將大、小車坐標(biāo)進(jìn)行統(tǒng)一,即在同一個固定位置同跨兩臺天車的實際坐標(biāo)一致。具體實施過程為:
(1)無人天車切換到自動模式,無人天車PLC接收到來自無人庫區(qū)二級系統(tǒng)下發(fā)的移動工單后,無人天車將向指定的目標(biāo)位置移動,待天車達(dá)到全速時,在二級畫面點擊暫停按鈕,無人天車一級PLC接收到暫停命令后,天車設(shè)定速度瞬間為零,算出在自動狀態(tài)下天車從高速到停止的滑行距離。以這種方式分別測算出兩臺天車的滑行距離,滑行距離分別設(shè)為S1和S2。
(2)手動狀態(tài)下將兩臺天車防撞柱緊緊貼在一起,算出貼在一起后兩臺天車大車實際位置的差值。差值設(shè)為D3。
(3)假設(shè)安全補償值為D_offset,自動狀態(tài)下天車的防撞距離D=S1+S2+D3+D_offset。
參考圖1,假設(shè)1#天車朝2#天車運行方向為坐標(biāo)大方向,天車自動狀態(tài)下,2#天車處于靜止?fàn)顟B(tài),1#天車朝2#天車運行時,二級通過通訊實時讀取天車的當(dāng)前位置,2#大車的當(dāng)前位置與1#大車的當(dāng)前位置的差值小于防撞距離時,二級將向1#天車PLC發(fā)送暫停命令,1#天車將暫停。2#天車開出防撞距離后,1#天車可繼續(xù)執(zhí)行工單。
地面站防撞功能:地面站防撞功能通過地面站PLC來實現(xiàn),功能是將上面所述的一、二級防撞功能結(jié)合在了一起,將其通過地面站來實現(xiàn),相當(dāng)于多一層保護。地面站PLC與無人天車PLC進(jìn)行通訊,接收來自天車的實時位置及防撞數(shù)值。地面站包含雙層保護,一層通過防撞激光傳感器實現(xiàn),實現(xiàn)方式和一級防撞相同;另一層通過大車激光測距傳感器實現(xiàn),實現(xiàn)方式和二級防撞相同。地面站防撞功能需要考慮通訊延時所造成的影響,將延時造成的差值累加在安全補償值當(dāng)中。在天車自動狀態(tài)下,當(dāng)?shù)孛嬲綪LC判定兩車距離到達(dá)防撞距離后,向無人天車PLC發(fā)送急停信號,無人天車PLC接收到信號后,天車將觸發(fā)軟急停。地面站防撞功能優(yōu)先級低于一、二級防撞功能。
5結(jié)語
無人天車防撞系統(tǒng)的研發(fā),綜合考慮了眾多因素,總共設(shè)定三層保護:一級防撞功能、二級防撞功能和地面站防撞功能。當(dāng)其中一層保護失效時,其它層保護均能起作用。這種多層保護能夠保障無人天車在庫區(qū)運行時的安全性及穩(wěn)定性,在無人天車系統(tǒng)當(dāng)中起著重要的作用。
參考文獻(xiàn)
[1] 向曉漢.西門子PLC工業(yè)通信完全精通教程[M].北京:化學(xué)工業(yè)出版社,2013.
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學(xué)報(2016年1期)2017-01-20 08:21:20
