先導式電液比例閥非線性位置自適應補償控制
2021-08-18 01:15:54陳立娟彭澤欽孫家慶
液壓與氣動 2021年8期
陳立娟,彭澤欽,孫家慶,高 偉,,華 鐘,艾 超
(1.南京工程學院 機械工程學院,江蘇 南京 211167;2.江蘇南京晨光集團有限公司 液壓技術應用分公司,江蘇 南京 210006;3.燕山大學 機械工程學院,河北 秦皇島 066004)
引言
電液比例閥作為液壓領域的核心控制元件,在工業生產中起著十分重要的作用。電液比例閥相比于傳統的伺服閥而言,具有抗污染能力強,成本低等特點,因此在實際的工業生產過程中得到了廣泛應用[1]。然而,在實際運行過程中,比例閥死區的存在導致其位置控制精度和動態響應相比伺服閥有所降低[2-5]。
因此,為提升電液比例閥的控制精度和動態響應特性,國內外學者在死區非線性特性和補償控制方面做了大量工作。TAO G等[6-7]針對機電液氣系統中的死區、側隙、滯回現象,建立了數學描述模型,提出了對應的補償方法,建立了以死區寬度和線性斜率為參數的死區模型,并提出了死區補償方法;陳俊翔等[8]、程相等[9]采用分段變增益的流量增益補償方案,對滑閥中位死區的線性補償技術進行了研究,保證了滑閥流量特性的線性,但其死區均是通過離線測試獲得的,且是針對固定死區;張佳旭等[10]對比例閥死區影響因素進行了分析,提出了零位電流階躍與衰減式位置指令跳躍的補償策略,但該控制方法沒有考慮死區值的時變性。此外,由于加工過程中存在加工誤差,導致批量比例閥的死區值具有波動性,每一個比例閥的補償值也各不相同,因此嚴重影響了廠商的批量化生產效率。
目前常用的電液比例閥位置控制采用一套固定參數的PID控制器,該控制器適應性有限,且固定增益的PID在運行過程中具有調整效率低下、精度不夠等缺點。覃展斌等[11]為方便有效地獲得電液比例閥閥芯位置控制PID控制器的最優PID控制參數,由繼電反饋法測得PID控制器的臨界參數,用三維黃金分割法進行PID參數優化,但該方法對于復雜對象的控制穩定性不佳;趙家輝等[12]在對比例電磁鐵的精度控制進行研究中,繼續改進了傳統的PID技術,使用積分分離PID作為系統的控制策略;龍玉其[13]設計了先導式電液比例方向閥的積分分離與抗積分飽和的PID控制算法進行位置控制,但其沒有考慮死區補償;孫菊妹[14]提出了基于BP神經網絡的前饋PID比例電磁閥控制算法,可以很好跟蹤比例電磁閥的時變特性, 改善了比例電磁閥的控制效果。但以上研究沒有考慮電液比例閥死區的影響。
上述研究內容為電液比例閥的高精度位置控制提供了一定的參考,但是并未考慮到系統的各種非線性因素對控制精度的影響。因此,本研究針對死區值不一致性和電液比例閥自身非線性等因素帶來的位置控制精度低的問題,建立比例閥非線性數學模型,基于在線檢測方法實時獲得比例閥死區,并結合模糊PID控制算法,提出了比例閥自適應補償控制策略,進而實現比例閥高性能位置控制。
1 先導式電液比例閥數學模型
1) 比例控制放大器環節
i=kaU
(1)
式中,i—— 電磁鐵輸入電流,A
U—— 放大器輸出電壓,V
ka—— 轉換系數,A/V
2) 先導級環節
電磁鐵推力:
Fph=kei
(2)
式中,Fph—— 電磁鐵推力,N
ke—— 電磁鐵電流-力系數,N/A
先導閥芯受力平衡方程為:
Fph=mps2xp+Bppsxp+2kpkxp+Fpf
(3)
式中,mp—— 先導閥芯等效質量,kg
xp—— 先導閥芯位移,m
Bpp—— 先導閥芯黏性阻尼系數,N·s/m
kpk—— 先導閥芯彈簧力系數,N/m
Fpf—— 先導閥芯所受摩擦力,N
由于先導閥芯死區的存在,先導閥口開度為:
(4)
式中,xpi—— 先導閥芯在i處的閥口開度,m
xp1,xp2—— 先導閥芯左、右位死區值,m
xps1,xps2—— 先導閥芯左、右位最大行程,m
3) 主級環節
先導式電液比例閥可等效為閥控缸模型,主閥相當于先導閥的負載,根據閥控缸通用數學模型,列出流量方程、連續性方程和力平衡方程如下:
QL=Kqxp-KcpL
(5)
(6)
Ap0pL=mms2xm+Bpmsxm+2Kpmxm+FLm
(7)
式中,Kq—— 主閥流量增益,L/(min·m)
Kc—— 主閥流量壓力系數,L/(min·MPa)
QL—— 負載流量,L/min
pL—— 負載壓力,MPa
Ap0—— 主閥芯有效面積,m2
xm—— 主閥芯位移,m
Ctp—— 主閥總泄漏系數,L/(min·MPa)
Vt—— 主閥總壓縮容積,m3
βe—— 有效體積彈性模量,Pa
mm—— 主閥等效質量,kg
Bpm—— 主閥所受黏性阻力系數,N·s/m
Kpm—— 主閥彈簧力系數,N/m
FLm—— 主閥所受干擾力,N
4) 位移反饋環節
主閥上安裝有位移傳感器,反饋主閥芯位移:
Uf=kmdxm
(8)
式中,Uf—— 反饋電壓,V
kmd—— 位移傳感器轉換系數,V/m
由式(1)~式(8),可得出先導式電液比例閥的控制框圖,如圖1所示。
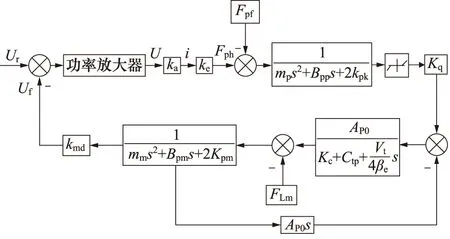
圖1 傳遞函數框圖
2 電液比例閥位置自適應控制
2.1 基于電流的非線性死區在線檢測
由于先導式電液比例方向閥在實際運行過程中,死區對運動控制精度影響很大,且很難精確測量其真實值。因此,本研究利用比例電磁鐵電流來表征先導閥死區的大小。
在死區范圍內,先導閥芯不受液動力作用,因此先導閥芯所受到的力學方程為:
(9)
當先導閥芯的速度足夠小時,先導閥芯所受慣性力和黏性阻力可忽略,式(9)變為:
(10)
由式(10)可知,電磁鐵電流和先導閥芯位移具有良好的線性關系,故可使用電磁鐵電流表征死區值。
死區在線檢測方法如下:將系統的控制閉環去掉,先導閥芯回中位,給左側電磁鐵緩緩增加電流,同時通過主閥閥芯位移傳感器不斷采集主閥閥芯位移,當檢測到主閥閥芯運動,說明此時先導閥剛剛越過死區,記錄下此時的電流值,表征先導閥左側死區;將先導閥芯回中位,給右側電磁鐵緩緩增加電流,重復上述步驟,得到表征先導閥右側死區的電流值。
2.2 基于死區在線檢測的模糊自適應控制
基于死區在線檢測技術的模糊控制框圖,如圖2所示,本研究利用模糊自適應PID控制器以電液比例閥主閥閥芯的位置偏差和偏差的變化量作為輸入,通過動態調整自適應控制器的參數,來控制進入比例電磁鐵的電流。
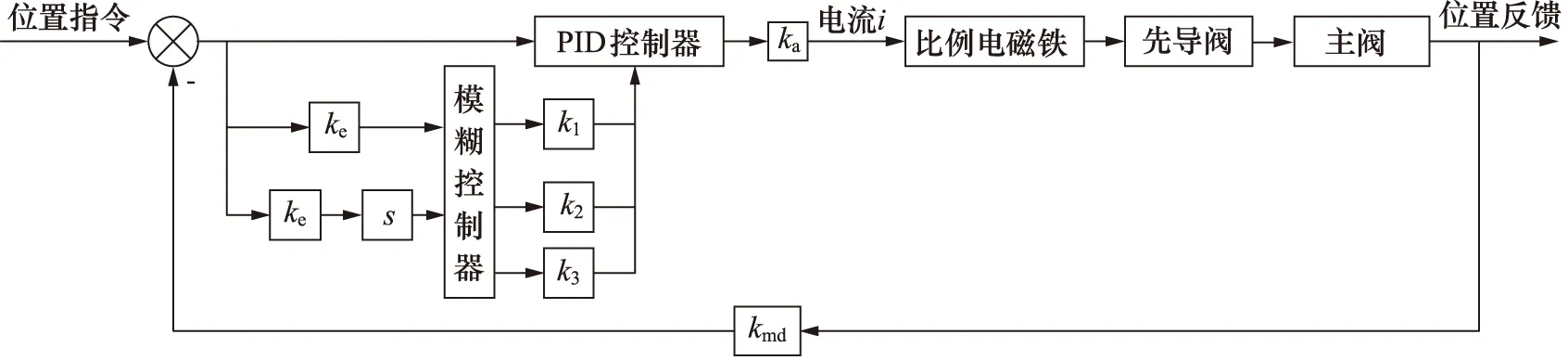
圖2 模糊自適應控制原理圖
模糊位置自適應控制的核心思想為:根據PID控制器中的3個參數的偏差和偏差的變化量之間的模糊關系,在運行時不斷的檢測電液比例閥主閥閥芯的位置偏差和偏差變化量,通過事先確定的關系,利用模糊推理的方法,在線調整PID控制器的3個輸出參數,從而實現對比例閥位置的自適應控制。
在系統進行控制的過程中,模糊控制器以位置指令信號和位置反饋信號的差值作為輸入1,以位置指令信號和位置反饋信號差值的變化率作為輸入2,模糊控制器分別對2個輸入按照其變化范圍進行分組;之后,根據模糊控制器中的模糊規則進行模糊化輸出,并將其輸出按照隸屬函數進行解模糊;最終,確定其控制參數的輸出值。隸屬度函數的選擇是模糊控制器設計中的核心,隸屬度函數選取的好壞直接影響模糊控制的效果,主要根據其輸入變量的變化范圍和輸入變量的個數、類型等選擇隸屬度函數,本研究選擇高斯型的隸屬度函數。
控制器的設計重點在于模糊控制律的設計研究,其核心公式控制決策值,為等級值、隸屬度的乘積求和與隸屬度求和的商,即:
(11)
式中,p—— 控制決策值
h—— 等級值
Z—— 隸屬度
在MATLAB中對模糊控制器模塊進行設計,其中隸屬度函數選取為高斯型,解模糊的方法選取為最大隸屬度法,即選取模糊集合中隸屬度最大的元素作為輸出值進行輸出,從而達到控制要求,模糊規則表如表1~表3所示。
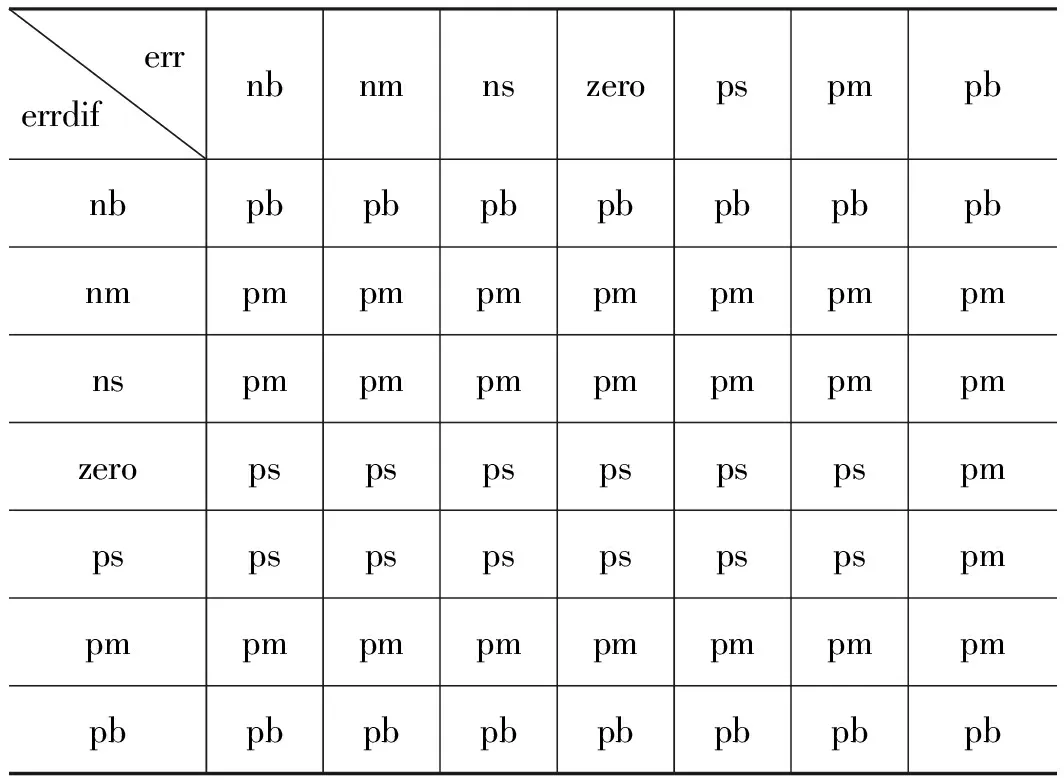
表1 模糊規則表—kp
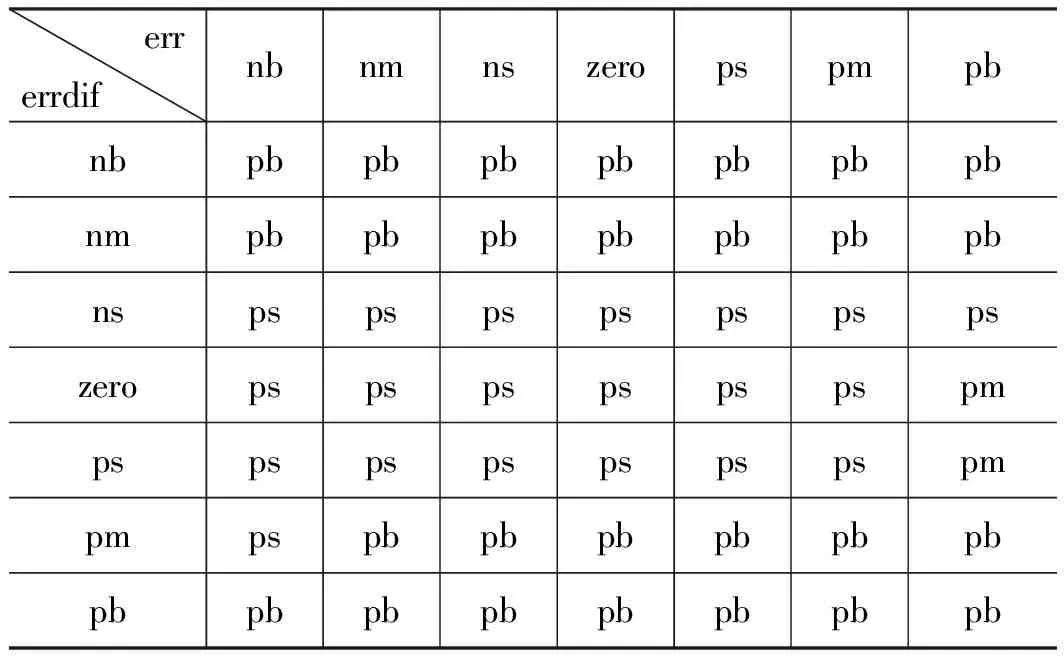
表2 模糊規則表—ki
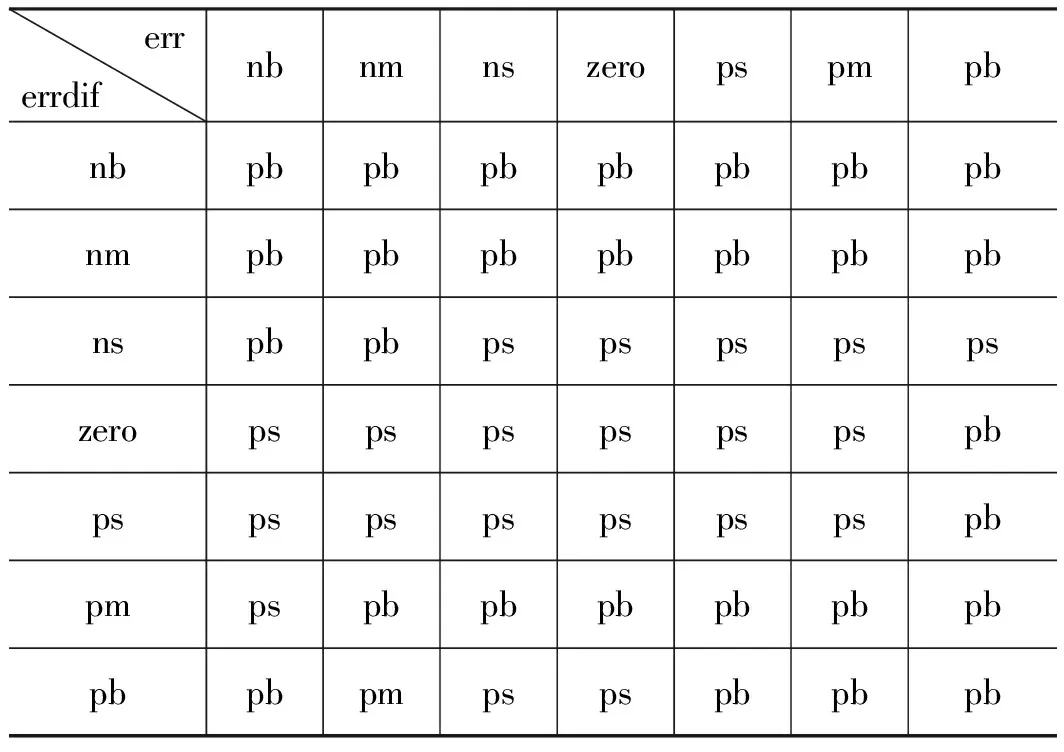
表3 模糊規則表—kd
3 仿真與分析
3.1 輸入正弦信號
當輸入幅值A為1、不同頻率的正弦信號時,位置指令信號和反饋信號如圖3、圖4所示。
由圖3和圖4可以看出,當位置指令信號為正弦信號時,位置反饋信號可以有效的跟隨指令信號,但是在第一個周期范圍內,位置反饋信號與位置指令信號之間存在一定的差值;之后,跟隨效果比較好,但是在主閥芯跟隨指令信號運動的過程中,存在較小范圍內的波動,這是比例閥中位死區導致的。當改變正弦信號的幅值和頻率時,跟隨效果相似,說明系統具有較好的魯棒性。
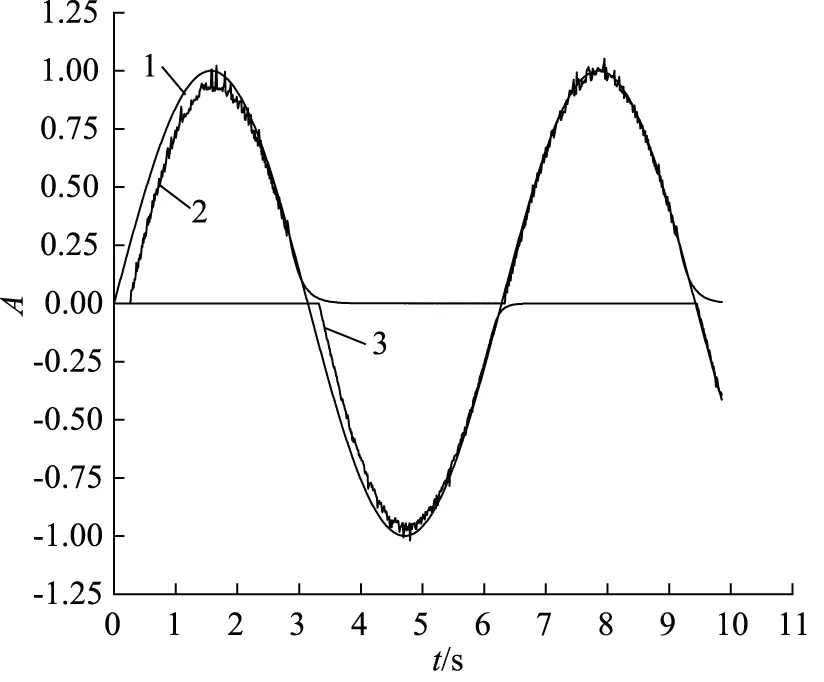
1.指令信號 2.正反饋信號 3.負反饋信號圖3 模糊PID正弦仿真曲線1
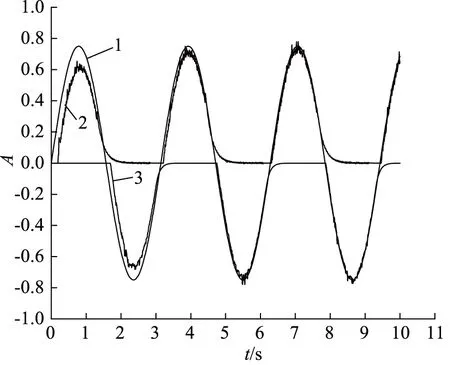
1.指令信號 2.正反饋信號 3.負反饋信號圖4 模糊PID正弦仿真曲線2
3.2 輸入斜坡信號
當位置指令為斜坡信號,輸入斜率分別為1和2時,其位置指令信號和反饋信號如圖5、圖6所示。
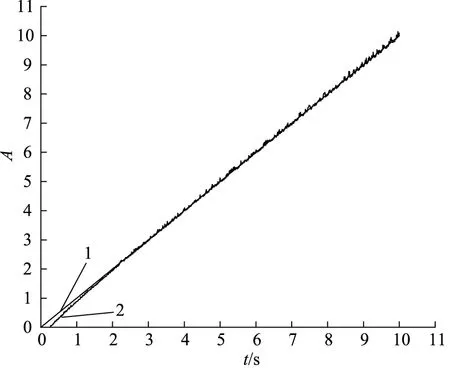
1.指令信號 2.反饋信號圖5 模糊PID斜坡仿真曲線1
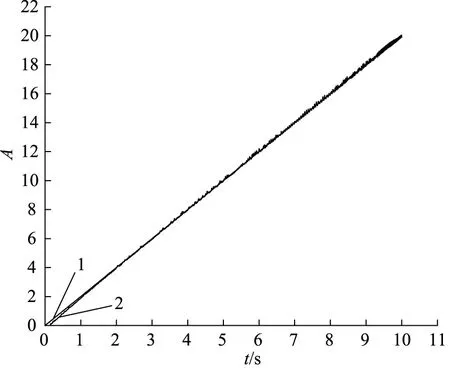
1.指令信號 2.反饋信號圖6 模糊PID斜坡仿真曲線2
由圖5和圖6可知,當輸入信號為斜坡信號時,其跟隨效果較好,且其反饋信號的曲線的波動情況明顯好于正弦信號。當改變斜坡信號的斜率時,其跟隨效果變化不大,說明系統具有較好的魯棒性。
3.3 輸入冪函數信號
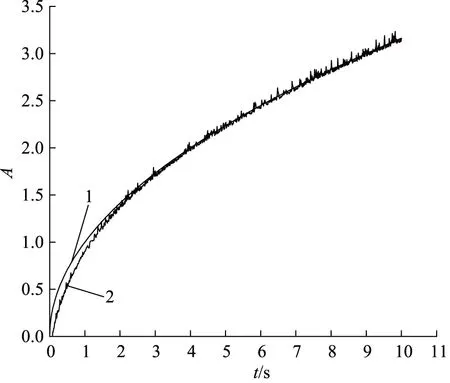
1.指令信號 2.反饋信號圖7 模糊PID冪函數仿真曲線
從上述仿真結果可以看出,采用模糊PID的控制方法,當輸入信號的幅值和頻率發生變化時,依然可以保持較好的跟隨效果,進一步說明了該控制系統具有較高魯棒性。
4 實驗驗證
4.1 實驗平臺
基于如圖8所示的電液比例閥實驗平臺和同批次生產的2個先導式電液比例閥,驗證基于死區在線檢測的電液比例閥位置自適應補償控制策略的正確性和有效性。實驗平臺主要由轉換電源、數據采集卡、放大板、先導式電液比例閥、PC機、仿真器和液壓油源組成。其中,轉換電源為數據采集卡和放大板提供24 V直流電,數據采集卡連接PC機,通過PC機給定數據采集卡位置指令信號,之后傳遞給放大板,放大板通過PWM信號占空比調節控制輸出電流到比例閥電磁鐵[15-16],與此同時,比例閥位移傳感器將位置信號反饋到放大板,PC機與放大板之間通過RS232轉USB通信,PC機上位界面可顯示并調整放大板中的參數。
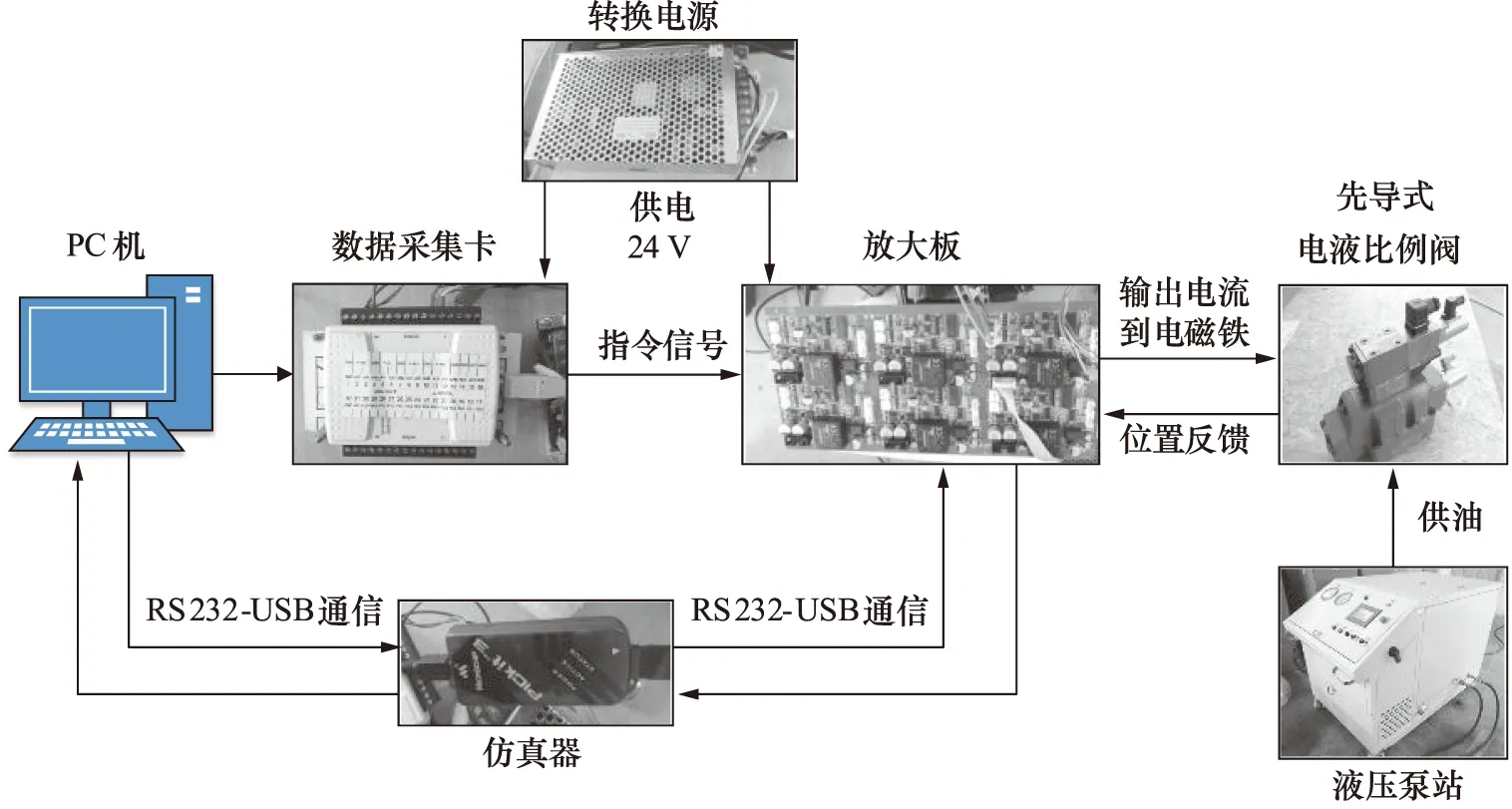
圖8 實驗平臺示意圖
4.2 實驗數據及分析
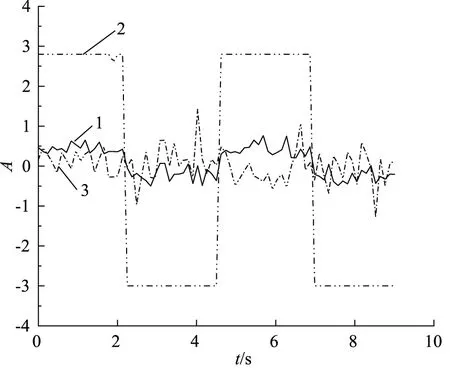
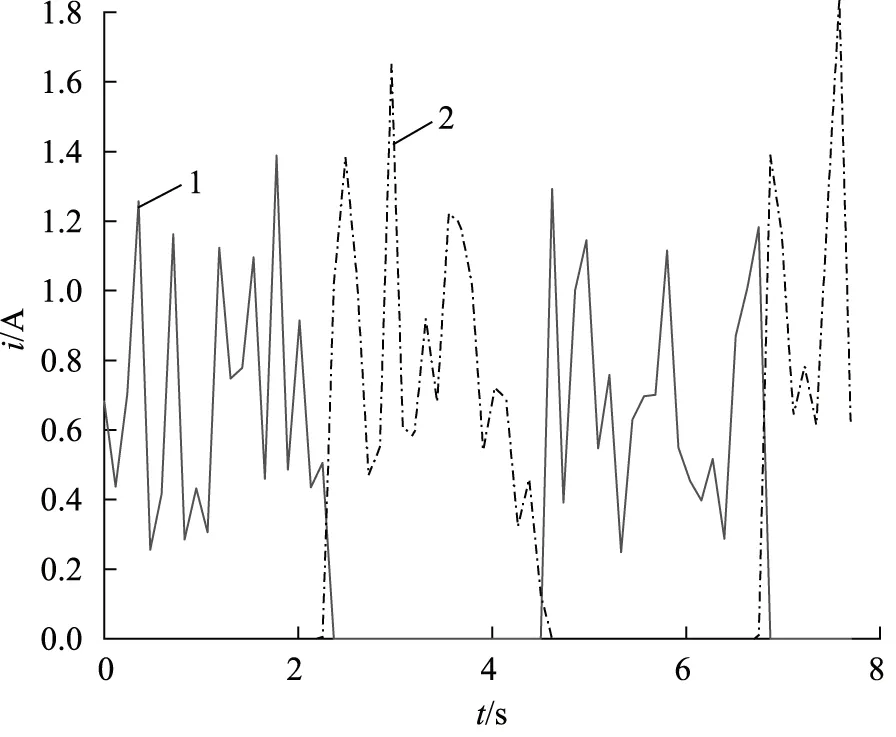
給定指令信號為頻率為0.2 Hz,幅值為10的正弦信號,第1個先導式電液比例閥的位置指令信號和位置反饋信號如圖9所示,左右位電磁鐵電流如圖10所示,位置自適應控制器的輸出如圖11所示。

1.指令信號 2.反饋信號圖9 閥1位置實驗曲線
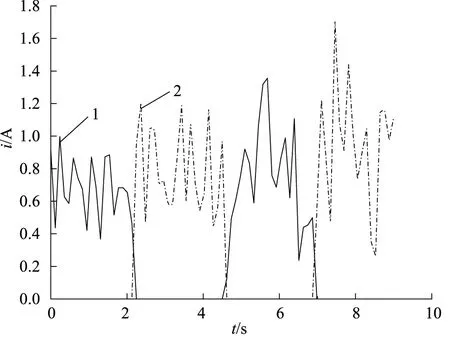
1.左側電磁鐵電流 2.右側電磁鐵電流圖10 閥1電磁鐵電流實驗曲線
1. kp 2. ki 3. kd圖11 閥1PID參數實驗曲線
由圖9可知,位置指令信號和采集信號的差值較小,即比例閥閥芯的跟隨性能較好,可以有效的跨越死區,對比例閥的控制精度有了很明顯的提高,驗證了本研究所提出控制策略的有效性。
由圖10可知,左右電磁鐵電流呈現交替工作的規律,且左電磁鐵峰值接近于1.8 A,右電磁鐵峰值接近于1.4 A,其波動較大,且不對稱,初步考慮是由于電流滯環導致。
由圖11可知,積分系數ki在兩值之間跳動,在單值范圍內,其變化效果較為平穩,而比例系數kp和微分系數kd在較小范圍內的波動,波動情況較為明顯。但是,比例系數kp和微分系數kd的平均值穩定在0值附近范圍波動,而積分系數ki呈現出較為明顯的方波特性。
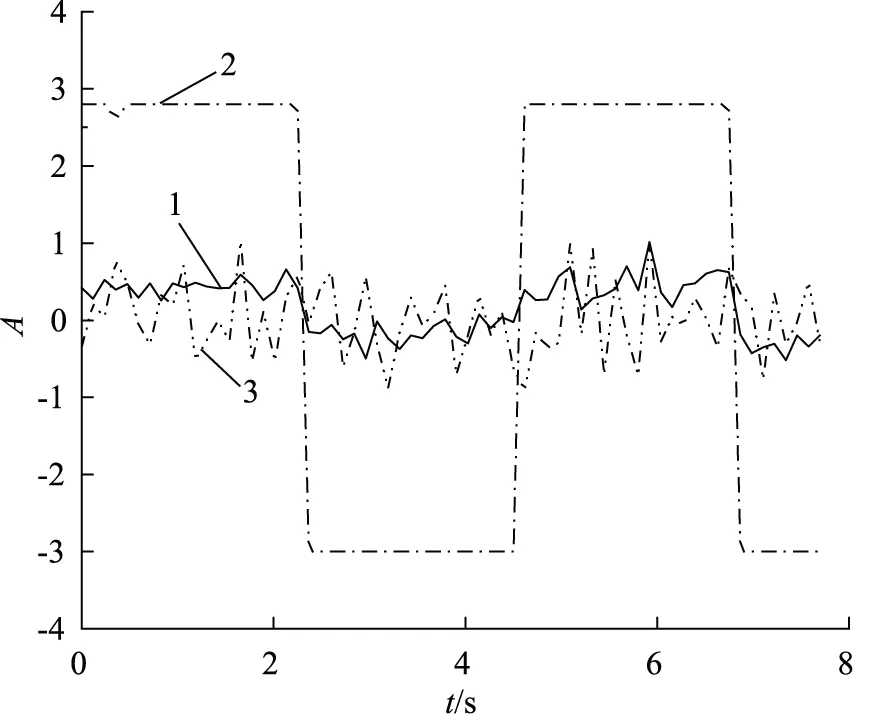
針對第2個先導式電液比例閥施加同樣的指令信號,分別觀察電液比例閥的位置、電磁鐵的輸入電流以及控制器輸出,具體如圖12~圖14所示。

1.指令信號 2.反饋信號圖12 閥2位置實驗曲線
1.左側電磁鐵電流 2.右側電磁鐵電流圖13 閥2電磁鐵電流實驗曲線
1. kp 2. ki 3. kd圖14 閥2PID參數實驗曲線
分別將圖12與圖9、圖13與圖10、圖14與圖11進行對比分析可知,盡管2個比例閥死區值各不相同,但在采用本研究所提出的控制策略后,都表現出較好的跟蹤效果,進一步驗證了該算法的有效性。
5 結論
本研究以提高先導式電液比例方向閥的位置控制精度為目標,從死區的在線檢測和模糊自適應控制補償等方面展開研究,結論如下:
(1) 建立了先導式電液比例閥位置控制系統數學模型,通過在線檢測死區的方式實現了對死區值不同的閥精準在線檢測,進一步解決大批量先導式電液比例閥生產帶來的不一致性問題。
(2) 提出的電液比例閥位置自適應控制算法有效地提高了位置控制系統的響應速度和控制精度,極大地提高了大批量電液比例閥出廠效率和位置控制系統的魯棒性。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
西安航空學院學報(2014年5期)2014-07-13 01:27:52
