氣動仿生蜈蚣外管路攀爬機器人研制
2021-08-18 01:15:58吳立波
液壓與氣動 2021年8期
關鍵詞:結構
吳立波
(邯鄲職業技術學院 機電工程系,河北 邯鄲 056001)
引言
管路機器人普遍應用在各種危險的工作環境中代替人工作業,極大降低了人工檢測的風險和作業成本。近些年,出現了很多管路內機器人,搭載相應的設備,實現管內壁面的清洗、探傷、管路敷設、油漆等多種功能,極大減少了人工,提高了管路作業效率。如,全氣動管路檢測機器人,實現了在不同直徑管路的撐壁行走[1];自適應移動機構的管內探查機器人,能夠在管路直徑改變時,自動地改變行走方式,提高越障能力[2];三軸差速式管路機器人,可適應轉彎結構處的運動[3]等。但管路外作業與管路內作業在技術實現上有著很大的不同,需要更好的附著力確保作業的可靠性。對于大直徑管路,多采用吸附方式。對于小直徑管路,多采用抱夾攀爬形式,技術上實現難度較高,造成推廣較難。
近些年,開展了很多相關的攀爬機器人研究,目前研究比較多的有爬繩機器人[4-6]、爬桿機器人[7-10]、爬壁機器人[11-12]等,管路外攀爬應用場合要求更復雜,難度更大。
根據河北省某市政部門提供的技術要求,以DN63的管路為攀爬對象,該管在自來水、天然氣、電力等行業應用廣泛。本研究提出了氣動仿生蜈蚣的攀爬策略,借助Pro/E進行虛擬樣機設計和分析,分析了腳趾應力應變和載荷向量,并進行優化設計,最后通過實驗測試,驗證了本研究提出的方法在外管道偵測勘察應用上的可行性。
1 機器人結構設計
多足結構是很多爬行機器人采用的通用結構,可有效提高爬行的效率和穩定性。蜈蚣通過多足交替的運動,實現前后的爬行,如圖1所示。在爬行過程中,一部分腳趾著地做支撐,另外一部分腳趾離地向前,周期性交替運動。在攀爬過程中,這種運動方式,保持了身體的平衡,確保有很好的地面附著能力。參照蜈蚣的多足結構,將這種運動方式運用于管路外攀爬。

圖1 蜈蚣多足結構示意圖
采用氣動為主要驅動方式,氣力驅動可以有效提升管路抱夾力,防止墜落,具有緩沖功能,成本低廉、速度快、無污染,同時還可適應雨雪等惡劣天氣環境。此外,在燃氣和自來水泄漏等危險作業場合,相比較電力驅動,適應性更強,安全性更高。
仿生蜈蚣整體結構如圖2所示,機器人共有5對腳趾,1,3,5為主腳趾,主腳趾上安裝有電控模塊、電磁閥、滑軌等部件;2,4為副腳趾。在主副腳趾上安裝有手指氣缸,并配有扇形腳趾,內部輪廓與管外形匹配,主副腳趾的手指氣缸與氣缸桿機械連接,在氣缸的驅動下,主副腳趾可前后往復運動。
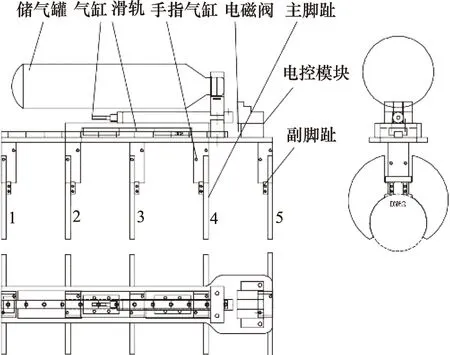
圖2 氣動仿生蜈蚣整體設計
如圖3所示,氣泵工作將壓縮氣體存入儲氣罐,4G控制模塊可接受遠程控制信號,當有控制信號輸入后,單片機系統驅動電磁閥順序工作,驅動手指氣缸的開閉,主副腳趾交替運動,腳趾抱夾管路爬行。

圖3 氣路控制系統
2 虛擬樣機的建立
通過Pro/E的ASSEMBLY組建分析模塊,建立整臺機器人虛擬樣機模型,如圖4所示。通過優化結構方案,控制整體重量,通過計算,整體體積為4.3764164×105mm3,整體框架采用3D打印材質PLA,支撐板和腳趾采用甲基丙烯酸甲酯單體聚合材料(亞克力)制作,輸入相應密度,獲得材料整體質量為1.09 kg,機器人整體質量較輕。

圖4 虛擬樣機結構
3 受力分析及結構優化
腳趾是機器人重要的零部件,形狀復雜且數量多,為了獲得更好的抓握效果,要求重量輕、可靠性好,才可以保證機器人的可靠攀爬。建立如圖5所示的受力模型,腳趾初定為扇形的結構,內弧與管料的外輪廓吻合,氣缸工作時使兩側的腳趾向內側收縮,夾緊管料,此時腳趾將受到氣缸的水平拉力F1和管料的推力F2作用。
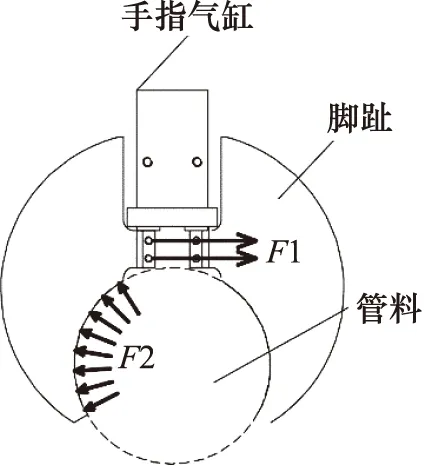
圖5 受力模型
選擇MHZ2-10手指氣缸作為腳趾驅動,該氣缸在0.8 MPa壓力下可產生1.7 N的力。在Mechanica中建立如圖6所示的有限元模型,與氣爪連接的2個通孔施加水平方向載荷,在與管料內側連接處限制位移約束。采用自適應網格劃分方法,將模型劃分為1397個網格。

圖6 有限元分析模型
計算結果如圖7所示,通過對1.7 N作用力的30%,60%和100%3種受力狀態下的計算結果分析可以看出,最大的受力點主要集中在腳趾與氣缸的連接孔和與管料接觸曲面靠近安裝孔處。結合圖8的載荷矢量圖可以看出,當安裝孔受力時,將使材料產生拉應力變形,在連接孔內側和管料接觸曲面棱角處形成了應力的集中,以此為中心形成發散的受力分布,腳趾外側應力應變相對較少,最大和最小受力相差近萬倍,沒有形成較好的等強結構。此外,腳趾對于管料夾握力主要依靠與離安裝孔近處接觸保證,距離安裝孔越遠,應力越小,夾握力變小,加上彈性變形影響,不能通過增大腳趾接觸面積的方式來提高夾握的可靠性。

圖7 應力應變圖

圖8 載荷向量圖
通過以上分析,對結構做如下改進,一是減少扇形腳趾外輪廓尺寸,最大限度減少材料使用,確保機器人輕量化;二是管料接觸曲面靠近安裝孔處進行R5的圓角過渡,減少應力集中,可有效提升夾握力的均勻分布;三是增大安裝孔處壁厚,有效增強受力能力,減少形變。
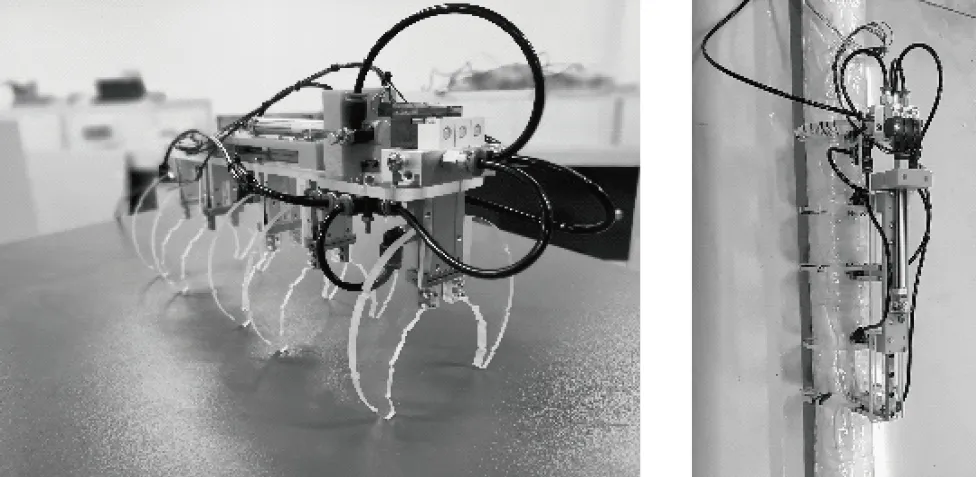
圖9 實驗樣機 圖10 實驗場景
4 實驗測試
制作實驗樣機如圖9所示,采用3D打印做機器人框架支撐,選擇甲基丙烯酸甲酯單體聚合材料做腳趾,有效減少機器人整體重量,選用二位三通微型高頻電磁閥做氣動控制,設置如圖10所示的攀爬實驗場景,氣壓0.8 MPa,順序動作時間間隔0.4 s,選擇豎向布置DN63的管道為攀爬對象,進行試驗測試。通過多次測試發現,優化后的結構可有效減少設備重量,提升攀爬抓握的效果。
5 結論
通過以上的方案設計、優化以及實驗測試,得出如下結論:
(1) 采用蜈蚣多足仿生結構作為機器人運動原型,是一種行之有效的外管路攀爬解決方法;
(2) 采用氣動作為動力驅動,能有效減少整體重量,提高抓握力,提升攀爬效率,對于燃氣管、自來水管等特殊場合較為適用;
(3) 本研究以DN63管道為研究對象,對于不同的管料,可設計不同的腳趾,但需通過結構的優化達到機器人最佳的工作效果。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50
