著陸器小型樣機三維落震實驗裝置的設計與仿真
2021-08-19 02:25:54趙建華廖萬斌陳金寶周向華
實驗室研究與探索 2021年7期
賈 山, 趙建華, 廖萬斌, 陳金寶, 周向華, 張 勝
(南京航空航天大學a.航天學院;b.深空星表探測機構技術工信部重點實驗室;c.航天進入減速與著陸技術實驗室,南京211106)
0 引 言
隨著嫦娥5號于近期準備發射,我國探月工程3步走戰略的第3步也即將實現探月采樣返回,火星探測器也已于今年7月發射,后續將繼續實施載人登月和小行星探測等任務[1-3],其中星表軟著陸機構作為深空星表著陸器的關鍵技術之一,將對任務的成敗有著直接的影響[4-6]。著陸器在完成初始設計后必須進行縮比樣機沖擊試驗,以測試整機和緩沖裝置的力學性能及觸地前后的姿態變化[7-8]。文獻[9]中詳盡闡述了3種可模擬月球重力場的試驗裝置,并將著陸器著陸沖擊試驗分為原尺寸(模擬的月球重力場下)和1/6模型試驗(地球重力場下)兩類,研究表明兩種試驗結果之間有良好的一致性,但試驗數據與真實著陸數據存在一定差異;文獻[10]中設計了一種用于單腿沖擊試驗的落震平臺,可測試著陸器單腿沖擊緩沖性能;文獻[11]中提出了一種可用于做整機落震沖擊試驗的吊掛釋放裝置,完成了吊具承載能力試驗以及吊掛釋放裝置與著陸沖擊數據采集系統的聯合調試,但無法模擬著陸器著陸時的水平速度影響,由于采用柔性帶實現吊掛承力功能,使得實際情況下的姿態控制并不理想。此外,月表、火星、小行星等地外天體表面環境惡劣、地形復雜[12],當姿控發動機發生故障或姿控效果不佳時會以非理想姿態觸地,這對緩沖吸能系統提出了嚴苛的設計要求,所以有必要設計一種釋放姿態可控的地面試驗裝置來驗證以不同釋放傾角觸地后著陸器的緩沖性能及姿態變化。
本文基于凸輪連桿等機構的工作原理,以便于加工制造、低成本、高可靠性為設計前提,以釋放姿態可控為設計目標,提出一種用于著陸器縮比樣機落震沖擊試驗的新型地面試驗裝置。
1 懸吊釋放裝置機構
1.1 總體方案
本裝置主要包括臺架、提升、水平框架、姿態控制、懸吊釋放和載荷及圖像采集等系統。其中:臺架系統對其他各系統起到支撐作用;提升系統主要用電動葫蘆將水平框架系統提升到預定高度;水平框架系統對姿態控制系統起到固定和拖拽作用,在試驗時可實現模擬水平速度;姿態控制系統可使懸吊釋放系統水平或傾斜預定角度;懸吊釋放系統用于固定并解鎖釋放縮比樣機;載荷采集系統主要包括安裝于地面的沖擊力傳感器和高速攝像機,分別用來采集縮比樣機著陸緩沖過程中的觸地沖擊力和姿態變化,該地面試驗裝置的結構布局如圖1所示。
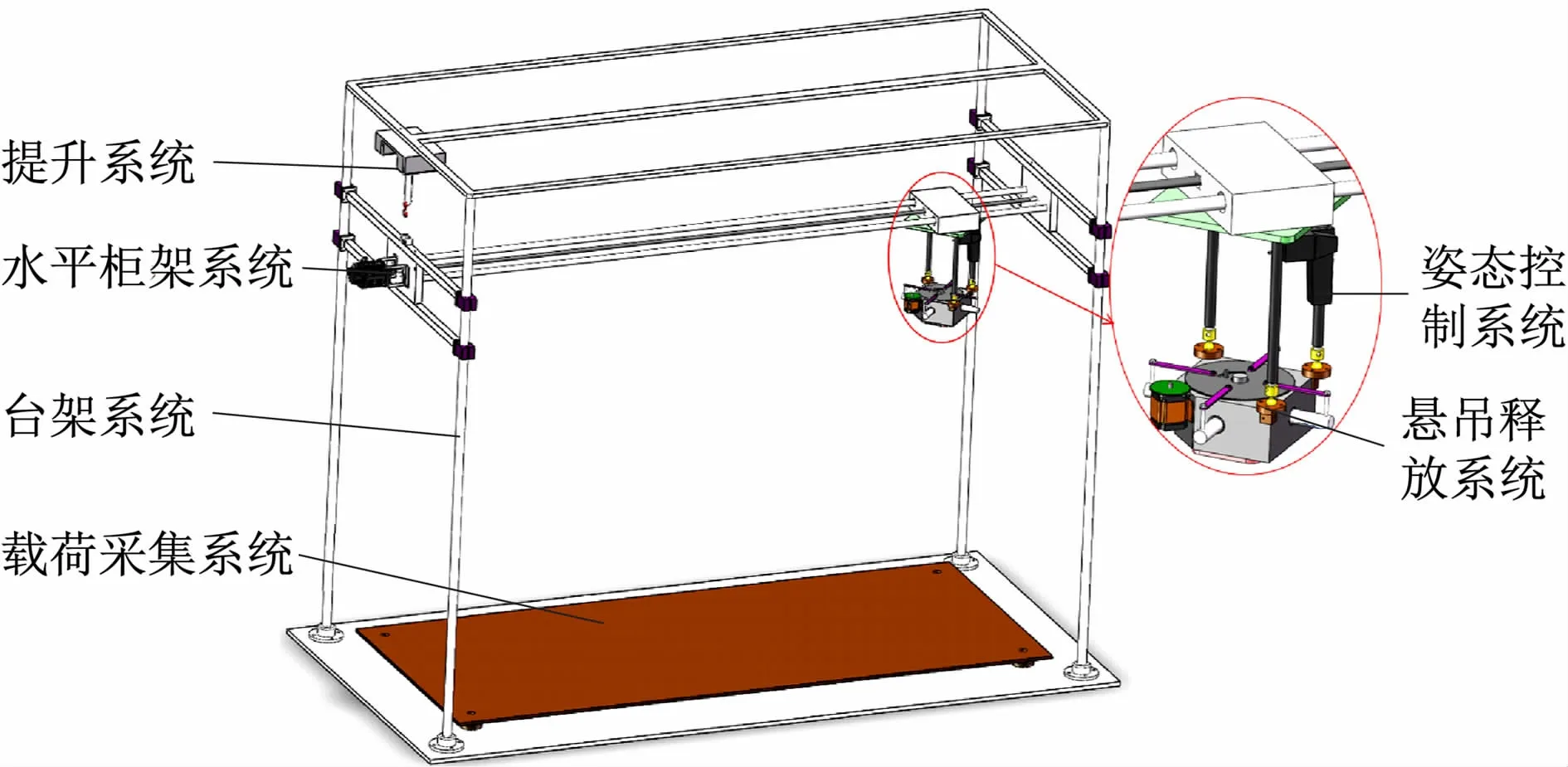
圖1 整機構型
以某著陸器的幾何尺寸為參照,根據著陸器縮比樣機全工況落震試驗要求,水平承力桿長度不少于5 m,提升到預定高度后縮比著陸器足墊距地表0.8 m,以實現觸地時垂直速度為4 m/s,解鎖過程耗時0.5 s,最大釋放傾角為12°,可承載的縮比樣機最大質量為500 kg,水平滑塊、姿態控制系統和懸吊釋放系統的總質量為50 kg。
1.2 主要分系統介紹
如圖2所示,水平框架系統可整體豎直移動以調整到預定高度,前后懸掛板之間固定有兩根水平承力桿,通過第2直線軸承與水平滑塊相對滑動,第1電動機通過聯軸器驅動滾珠絲杠轉動,絲杠螺母與水平滑塊固定,實現了水平滑塊的橫向移動。
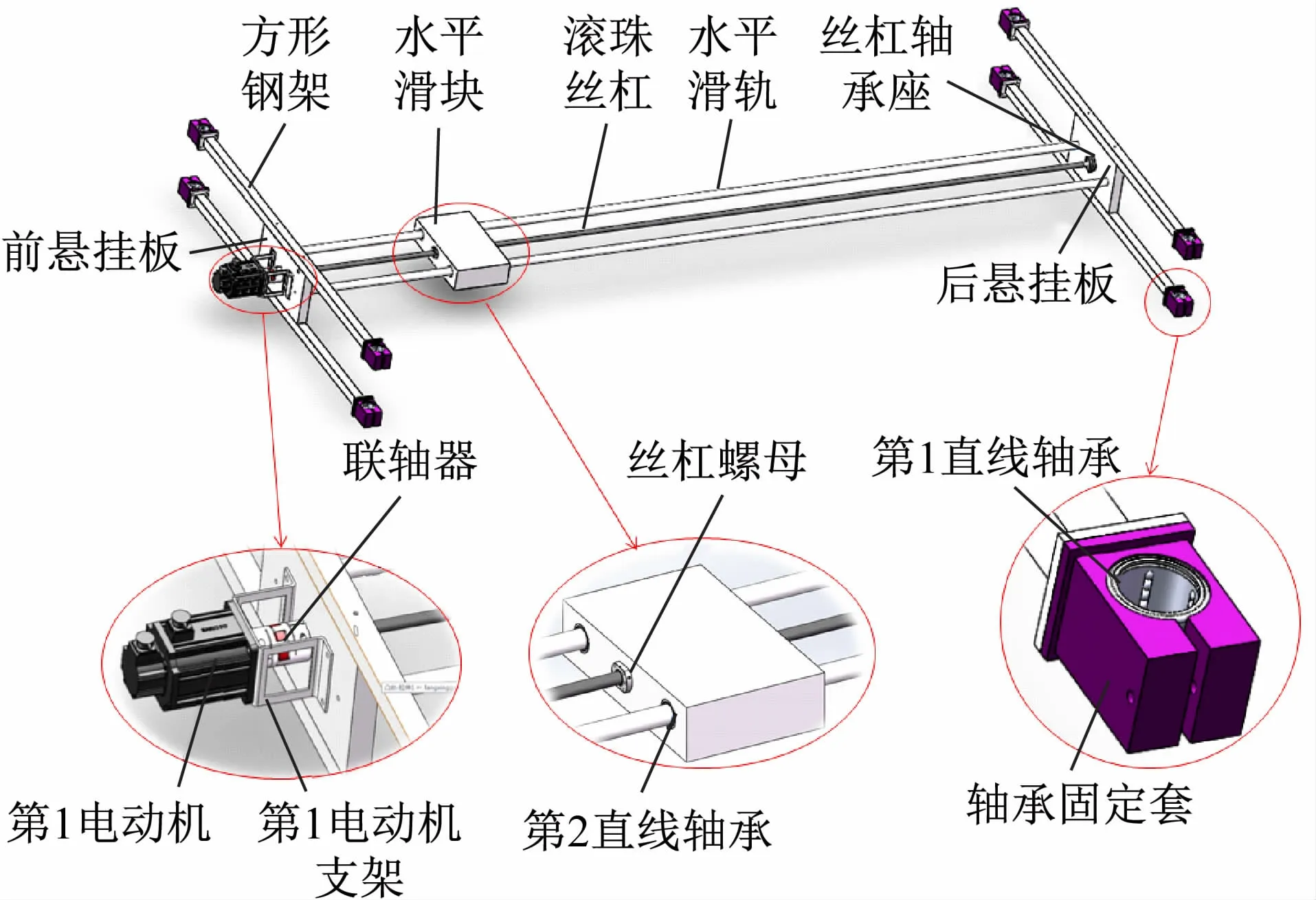
圖2 水平框架系統
如圖3所示,姿態控制系統中的頂板與圖2所示水平框架中的水平滑塊固定,2根豎直承力桿上端與頂板固定連接,下端為球鉸鏈,電動推桿上下均安裝球鉸鏈。
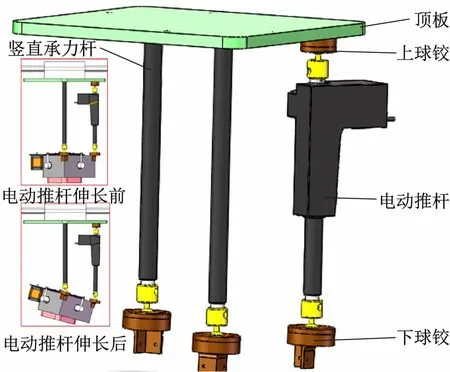
圖3 姿態控制系統
如圖4(a)所示,懸吊釋放系統應用了凸輪連桿聯動機構原理,第2電動機驅動小齒輪盤帶動大齒輪盤轉過固定角度,實現4根導桿的同時縮回和伸出,釋放滑塊的鎖定和解鎖釋放,釋放滑塊與縮比樣機固定(此固定方式依著陸器構型而定),其中大齒輪盤上有限位凹槽防止轉動過度,導桿內部端面為半球形,配合轉動套使之在解鎖脫落時更為順滑,如圖4(b)、(c)所示。
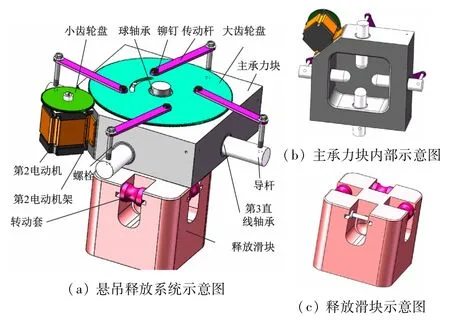
圖4 懸吊釋放系統
2 動力學建模與分析
2.1 絲杠驅動部分
地面試驗裝置可承載著陸器縮比樣機最大質量為500 kg,水平滑塊、姿態控制和懸吊釋放系統的總質量為50 kg,根據經驗電動機所需驅動扭矩:

式中:Fa為絲杠螺母對絲杠的切向壓力;I為絲杠導程,32 mm;n為絲杠正效率,0.94。水平運行下直線軸承的動摩擦因數為0.003,重力加速度取9.8 m/s2。在不考慮加速度情況下電動機所需輸出的驅動扭矩為95.6 N·mm。
2.2 姿控和懸吊釋放系統
地面試驗裝置可實現的最大釋放傾角為12°,分別取0°、2°、4°、6°、8°、10°、12°為傾斜釋放的預設角度進行分析,建立主承力塊、釋放滑塊和縮比樣機間的簡化力學模型,如圖5所示。圖中:α為預設傾斜角度;F1、F2為間隙配合引起的主承力塊對釋放滑塊的接觸彈力(忽略之間的摩擦力);G為縮比樣機的質量重力;Fp為導桿對釋放滑塊的提升力。釋放滑塊與縮比樣機固定。若水平滑塊、姿控和懸吊釋放系統部分保持靜止或水平勻速,則由于在釋放時主承力塊內側對釋放滑塊外壁的微小間隙存在點接觸彈力(即F1、F2)的作用,使得在釋放后釋放滑塊和縮比樣機整體會發生與調姿方向相反的翻轉。若施加一向右的加速度,可使主承力塊對釋放滑塊只起到限定姿態的作用,而不會對釋放后的姿態變化產生明顯影響,其原理與光滑斜面上的滑塊運動相似,如圖6所示,若斜面固定或以勻速運動,則滑塊沿斜面向下有絕對加速度B,其中:
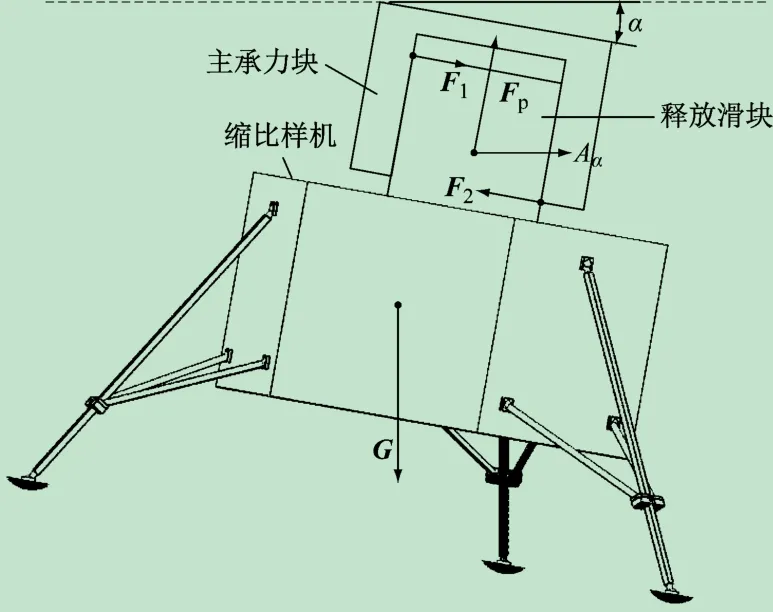
圖5 懸吊釋放系統的簡化力學模型
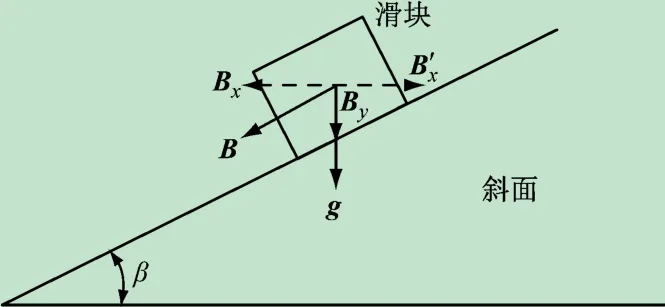
圖6 滑塊斜面模型
式中:g為重力加速度;β為斜面傾斜角;Bx為加速度B沿水平方向分量,By為加速度B沿豎直方向分量。
若使得處于傾斜狀態的滑塊具備一向右的加速度B′x,則滑塊只有豎直向下的絕對速度和絕對加速度,斜面只起到對滑塊限定姿態的作用,而不影響豎直向下的運動。相似地,對于懸吊釋放裝置,根據圖5所示的幾何關系,可得

式中:Aα為姿態控制系統傾角為α時為不影響釋放滑塊被釋放后的姿態,主承力塊(或釋放滑塊)所需具備的理論加速度。
3 聯合仿真
為檢驗上述理論模型的正確性,采用Adams和Matlab聯合仿真[13]獲得各個釋放傾角下水平滑塊的最優加速度。由于動力學仿真軟件Adams自身的建模能力較弱,所以在SolidWorks中按預設參數建模并裝配,將模型導入到Adams中[14],如圖7所示。對模型進行Adams前處理,圖4中大齒輪盤和小齒輪盤間的接觸力設置為碰撞[15],其中剛度系數K=0.866 7
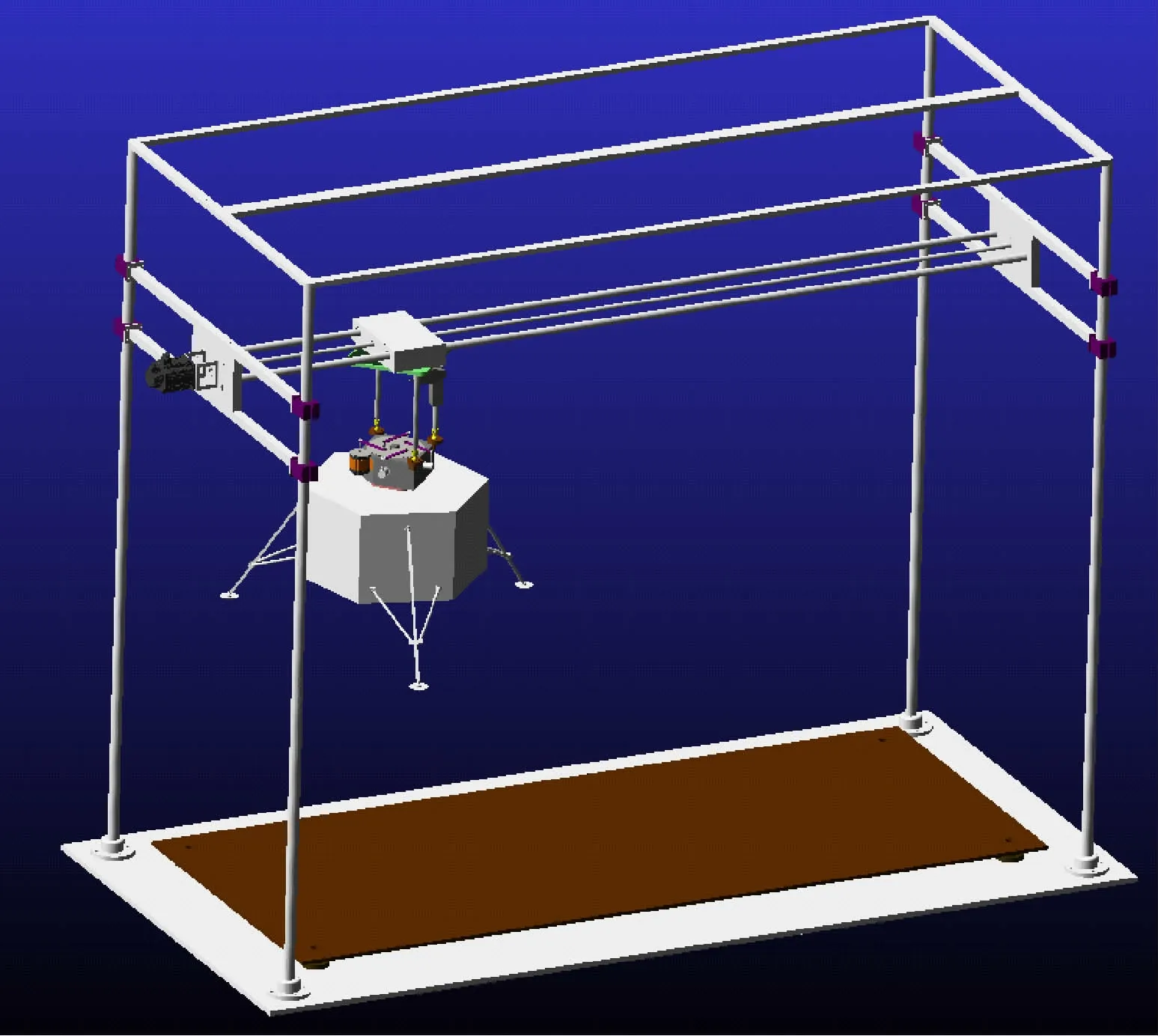
圖7 Adams仿真模型
GN·m-1、接觸法向力中材料剛度項貢獻值的指數為1.5、阻尼系數取值30 kN、穿透深度為0.1 mm。導桿和轉動套之間、主承力塊和釋放滑塊之間的接觸力參數如圖8所示,其他部分添加相應的運動副和約束。
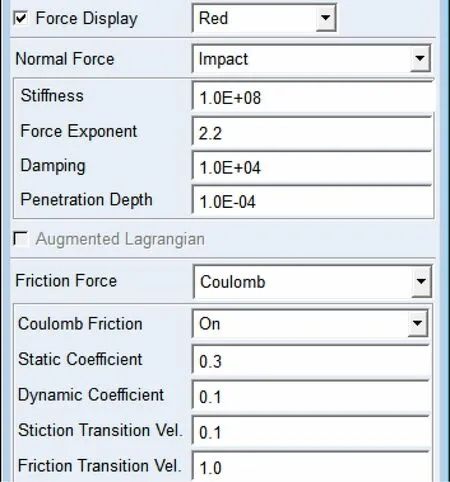
圖8 接觸力參數設置
仿真0~0.5 s為姿態調整段,電動推桿伸長,使主承力塊傾斜預定角度(如圖3示意),0.5~1 s對水平滑塊施加補償力,使得水平滑塊具備加速度A,懸吊釋放系統同時解鎖釋放,著陸器縮比樣機在重力作用下自由落體,仿真1.5 s時取縮比樣機的姿態絕對傾斜角,將姿態絕對傾斜角與釋放傾角相減,得到自由落體段的姿態變化角,求各釋放傾角下最優加速度的具體流程如圖9所示。
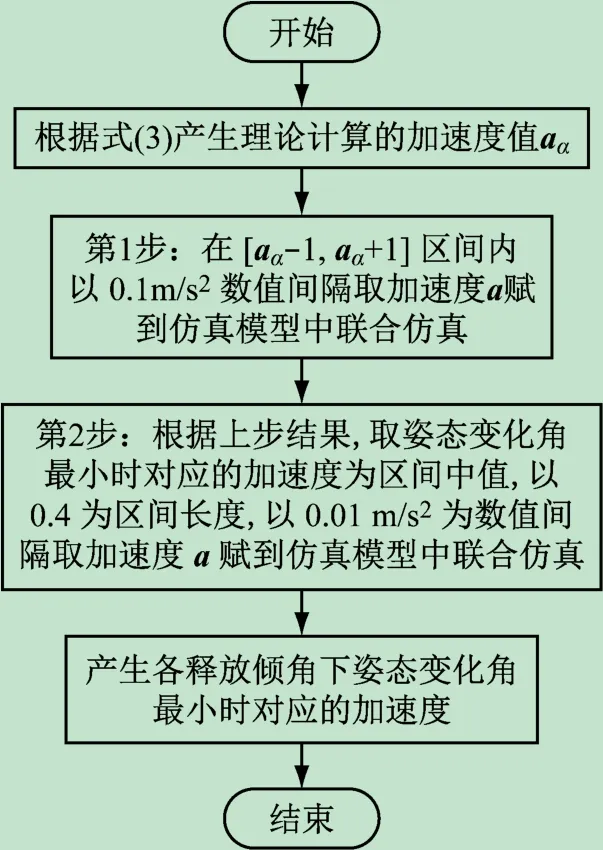
圖9 聯合仿真流程
為對圖9中的流程做進一步說明,以傾斜釋放角度2°為例,根據式(3)得到的理論加速度值為0.34 m/s2,為檢驗該計算結果的正確性,在仿真中,以[-0.66,1.34]為加速度取值區間,以-1.66、-1.56、…、1.24、1.34為加速度具體取值賦到仿真模型中,得到姿態變化角的數據,通過對數據進行分析,為進行更加細化的仿真,以[0.14,0.54]為加速度取值區間,以0.14、0.15、…、0.53、0.54為加速度具體取值賦到仿真模型,觀察數據得到使得下落過程中姿態變化角最小時的水平滑塊最優附加加速度。
4 仿真結果分析
通過在Matlab和Adams中的第1步聯合仿真,得到如圖10所示的加速度(取值間隔為0.1 m/s2)與姿態變化角的曲線。在姿態變化角趨于0°時對應的加速度小區間內姿態變化角下降較快,在遠離0°的區間內變化趨勢不太明顯且有小幅抖動。
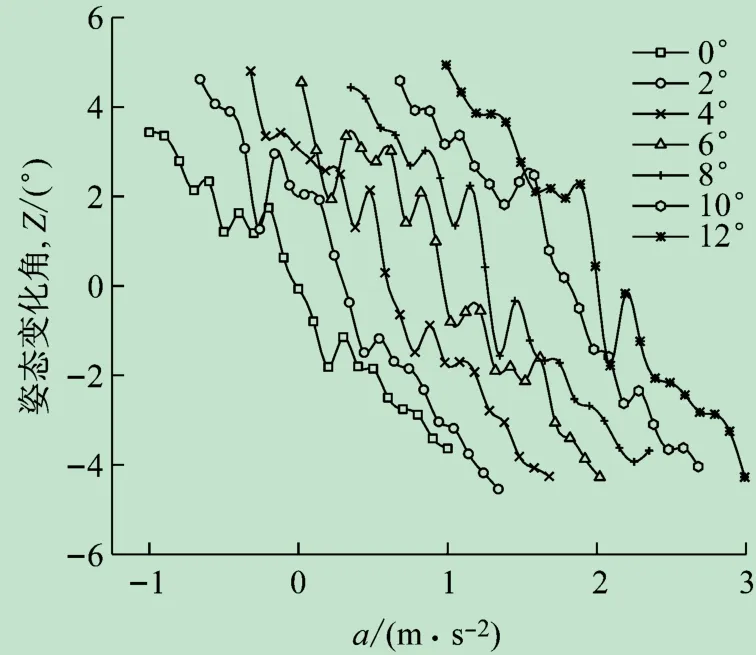
圖10 第1步的姿態變化角隨加速度變化曲線
在第1步聯合仿真的基礎上,通過對所得數據觀察,縮小了加速度變量區間(取值間隔為0.01 m/s2),再次聯合仿真,由于仿真軟件的計算誤差導致波動較為明顯,對所得到的姿態變化角數據進行Savitzky-Golay濾波,得到如圖11所示的變化曲線。
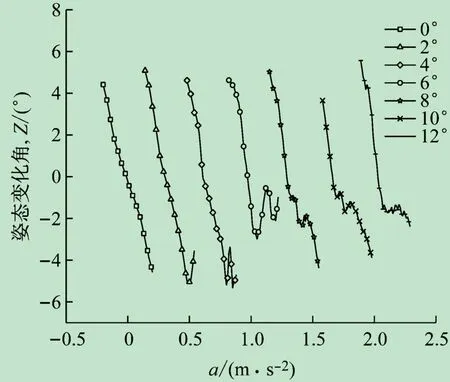
圖11 第2步的姿態變化角隨加速度變化曲線
整體姿態變化角幅值相較于第1步而言有明顯縮小,取每個釋放傾角下姿態變化角最小時的加速度值,見表1,可見,聯合仿真得到的最優加速度解與根據式(3)而得的理論計算值基本一致,證明了圖5中懸吊釋放系統力學模型的正確性。
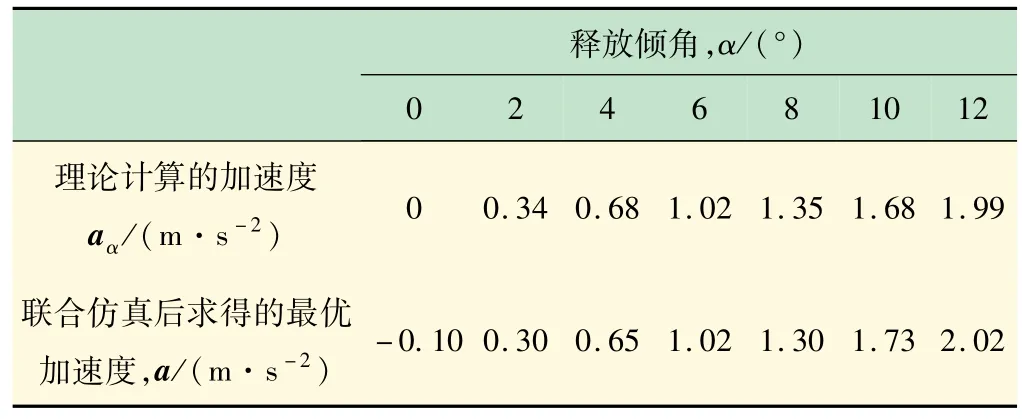
表1 理論計算值與聯合仿真最優加速度值對比
圖12所示為各傾斜釋放角度下施加最優加速度和無加速度時姿態變化角曲線。
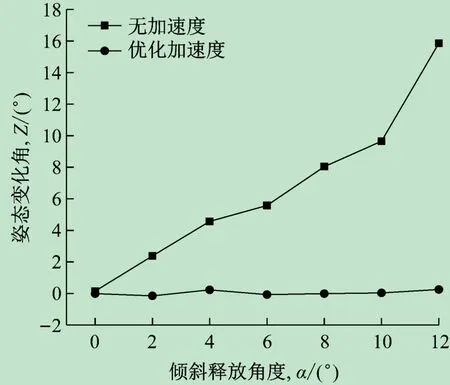
圖12 姿態變化角對比圖
由圖(12)可知:未施加加速度時,姿態變化角隨傾斜釋放角度的增大而逐漸增大,無法滿足對縮比樣機釋放姿態定量可控的試驗要求;施加了最優水平加速度后的姿態變化角在每個傾斜釋放角度下均趨于0°,可在最佳程度上定量測得縮比樣機以預定姿態觸地后的整體緩沖性能及姿態變化。
表2為各釋放傾角下,在姿態調整段后施加水平最優加速度時電動推桿所需的自鎖力以及第2電動機解鎖釋放時所需的驅動扭矩,仿真數據表明,隨著傾斜釋放角度的增加,電動推桿所需的自鎖力逐漸增大,其原因是隨著釋放傾角的變大,釋放滑塊固結的縮比樣機部分回到平衡位置(水平)的趨勢越大,而這種趨勢被電動推桿的自鎖力阻止,施加的加速度雖然可以部分抵消恢復趨勢,但影響較小;電動機驅動扭矩維持在32~35 N·m左右,常用電動機即可滿足要求。

表2 最優加速度下裝置所需性能
5 結 語
本文提出了一種可實現著陸器縮比樣機落震觸地姿態可控的地面試驗裝置,并介紹了該裝置總體和各重要分系統的結構組成和工作原理。由經驗公式得到了第1電動機所需驅動扭矩;為了保證著陸器縮比樣機從釋放到觸地整個過程中下落傾角不變,在所建立的滑塊斜面模型和主承力塊、釋放滑塊及縮比樣機間的力學模型的基礎上,推導得掛載著陸器縮比樣機試驗裝置中水平滑塊所應具備的水平運動加速度解析解,并通過Matlab和Adams聯合仿真對該加速度解的正確性和有效性進行了核驗,得到了各釋放傾角下施加最優加速度時電動推桿自鎖力和第2電動機驅動扭矩。仿真結果表明,當水平滑塊以接近理論模型求得的水平加速度運動的情況下進行釋放,著陸器縮比樣機將以較理想的觸地傾角完成落震緩沖,實現地面試驗中對著陸器樣機觸地姿態定量控制的要求,為發展滿足未來深空星表探測任務需求的軟著陸裝置提供一種行之有效的地面試驗技術解決方案。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
美與時代·美術學刊(2022年3期)2022-04-27 01:18:15
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
火花(2019年12期)2019-12-26 01:00:28
裝備制造技術(2019年12期)2019-12-25 03:06:46
人大建設(2019年12期)2019-05-21 02:55:32
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
學苑創造·A版(2015年11期)2016-01-14 09:03:27
