
基于深度學習的路面不平度等級識別研究
2021-08-20 17:18:33薛俊俊陳雙
機電工程技術 2021年11期
關鍵詞:深度學習
薛俊俊 陳雙
摘要:準確的路面激勵信息對汽車行駛安全性和乘坐舒適性有重要影響。針對目前路面不平度等級識別算法存在復雜和準確率低等問題,提出了一種注意力門控循環(huán)單元(BiGRU-Attention)網(wǎng)絡和車輛振動響應的路面不平度等級識別算法。首先,通過濾波白噪聲法建立隨機輸入路面模型,1/4車輛振動模型平順性仿真實驗獲取車輛振動響應信號,選擇滑動窗口為1 s截取樣本構造數(shù)據(jù)集;然后,通過BiGRU網(wǎng)絡學習樣本信號的深層次信息,Attention機制優(yōu)化時刻特征對辨識結果的貢獻率比重,快速準確地識別出路面不平度等級;最后通過消融實驗實現(xiàn)算法的驗證。實驗結果表明,基于BiGRU-Attention路面不平度等級識別算法的準確率可達96.9%,相比基礎模型有1%~3%的提升。該算法能夠準確識別路面不平度等級,為車輛動力學控制提供有力的理論依據(jù)。關鍵詞:反向分析;路面不平度等級辨識;深度學習;門控循環(huán)單元;注意力機制
中圖分類號:U463文獻標志碼:A文章編號:1009-9492(2021)11-0066-04
Research on Road Roughness Level Recognition Based on Deep Learning
Xue Junjun ,Chen Shuang ※
(Automobile and Traffic Engineering, Liaoning University of Technology, Jinzhou, Liaoning 121000, China)
Abstract: Accurate road surface incentive information has an important impact on the safety and ride comfort of vehicles. Aiming at the problems of complexity and low accuracy in the current road roughness level recognition algorithm, a road roughness level recognition algorithm was proposed based on the BiGRU-Attention network and vehicle vibration responses. Firstly, a random input road model was established by filtering white noise method, and a quarter of the vehicle model ride comfort simulation experiment was used to obtain vehicle vibration response signals to establish a data set. Then, the in-depth information of the sample signals is captured through the BiGRU network and the Attention mechanism optimize the contribution rate of the moment feature to the identification result, so that the road roughness level can be accurately identified. Finally, the verification of the algorithm was achieved through ablation study. The results show that the identificationaccuracyof theroadroughnesslevelrecognitionalgorithmbasedonBiGRU-Attentioncanreach 96.9% ,whichisan improvement of 1%~3% compared with the basic model. The algorithm can accurately identify the level of road roughness and provide a strong theoretical basis for vehicle dynamics control.
Key words: reverse analysis; road roughness level recognition; deep learning; gated recurrent unit; attention mechanism
0 引言
在行駛過程中,車輛振動主要的激勵來源于路面,辨識路面不平度對車輛動力學控制有重要意義。不同等級的路面下需要不同的懸架控制參數(shù),來滿足車輛行駛安全性和乘坐舒適性。因此,準確辨識路面不平度等級能夠為控制參數(shù)的調節(jié)提供直接的依據(jù)。目前常用的路面信息獲取的方法有測量法和反向分析法。
測量法包括直接測量法和非接觸測量法。直接測量法[1]是利用路面不平度測量儀直接測量路面不平度,但是,由于直接測量法無法實現(xiàn)車載實時測量,目前應用較少。非接觸測量法[2-3]是指利用激光雷達、紅外線、車載攝像頭等設備,對路面信息進行直接提取,從而對不同路面進行識別。直接測量法雖然獲取的路面范圍廣,但是成本較高,對天氣等條件也很敏感。
反向分析法是指在行駛的車輛上安裝加速度傳感器、位移傳感器等,通過獲取不同路面下的車輛振動響應并結合算法反向識別路面。Nguyen等[4]基于車輛響應和隨機森林等方法檢測道路表面的狀態(tài),進行路面分類辨識;林聰?shù)萚5]通過建立 NARX 神經(jīng)網(wǎng)絡路面不平度預測模型,利用車輛響應對路面不平度進行預測.與測量法相比,通過車輛振動響應的反向分析法受外界因素,如天氣、光線等影響較小,性價比高。
隨著人工智能的逐漸普及,深度學習成為近幾年的研究熱點,它的優(yōu)勢在于可以自動快速構建深層特征,具有良好的魯棒性。目前,深度學習在智能交通系統(tǒng)和車輛領域有一定的發(fā)展,如交通流量預測[6]、環(huán)境感知[7-8]和駕駛行為識別[9]等方面。本文在門控循環(huán)單元(GRU)網(wǎng)絡中引入雙向循環(huán)機制(Bidirectional)和注意力機制( Attention ),建立了利用BiGRU-Attention 網(wǎng)絡作為主體,選擇車身加速度和車輪加速度作為輸入量的路面不平度等級識別模型,通過BiGRU學習車輛振動響應信號中的深層次信息,Attention 突出時刻特征對路面等級辨識結果的貢獻率比重,同時避免特征信息在傳遞過程中的損失,準確識別出路面不平度等級。因此,相比其他深度學習方法更適合應用車輛振動響應的時序分析。
1BiGRU-Attention模型設計
1.1 模型結構
本文的創(chuàng)新點是基于BiGRU-Attention 算法捕捉時序車輛振動響應信號特征,建立路面不平度等級識別模型。BiGRU-Attention 模型由輸入層、BiGRU層、Atten- tion層和輸出層組成,結構如圖1所示。車輛振動響應信號作為輸入,BiGRU層和Attention 層提取時序結構特征以實現(xiàn)辨識路面等級的作用,最后輸出層利用Softmax函數(shù)輸出路面等級,分別是 A 級路面、B 級路面、C 級路面、D 級路面的識別率。
1.2 輸入層
BiGRU-Attention 模型的輸入為:
Xt ={α1(t), α2(t)} (1)
式中:Xt為 t 時刻的模型輸入向量;α1(t)為車身垂向加速度;α2(t)為車輪垂向加速度。每組樣本數(shù)據(jù)根據(jù)滑動窗口大小確定為100個時刻。
1.3BiGRU層
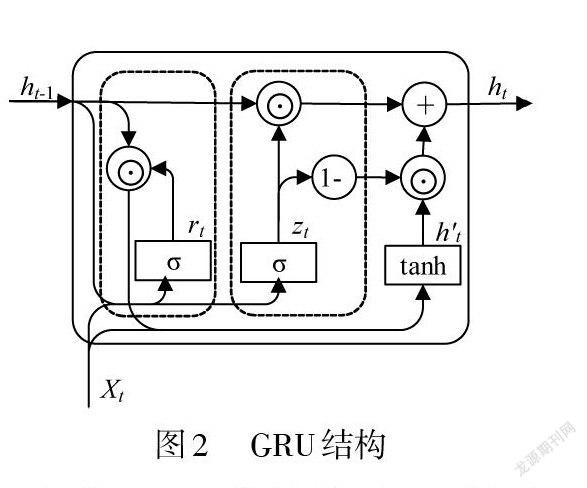
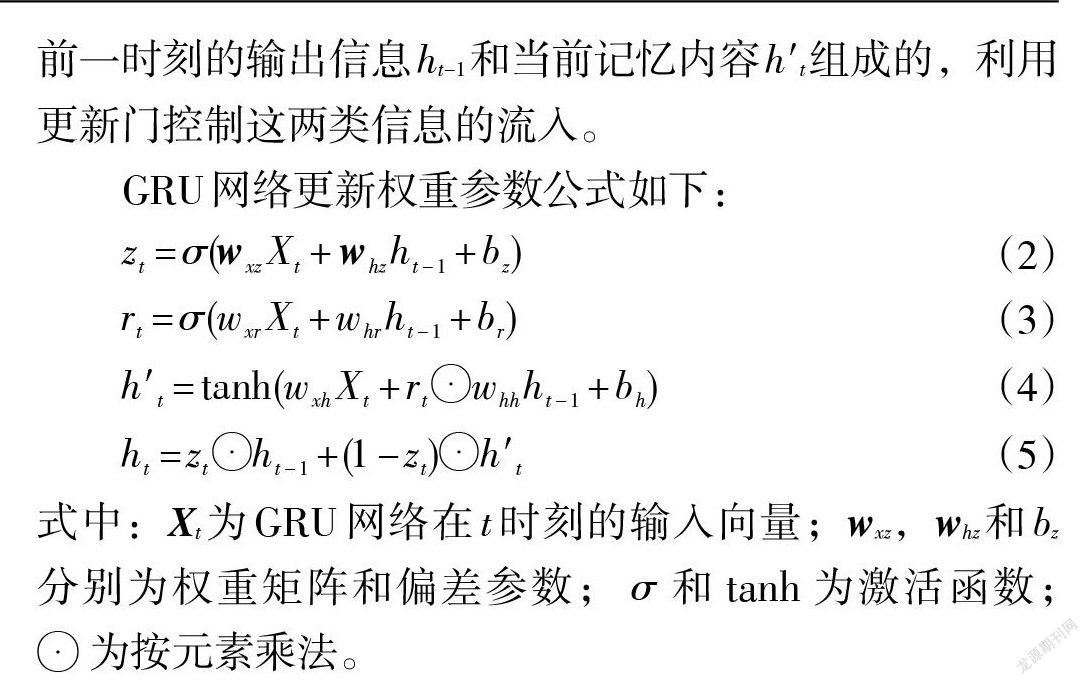
長短期記憶網(wǎng)絡(LSTM)[10]引入了門控機制調節(jié)信息流,成功解決了循環(huán)神經(jīng)網(wǎng)絡存在的梯度消失等問題。然而, LSTM 模型結構復雜,需要較長的訓練時圖2GRU結構間。2014年,Cho等[11]針對優(yōu)化 LSTM的結構提出了門控循環(huán)單元(GRU)網(wǎng)絡,結構如圖2所示。圖中zt代表更新門,rt 代表重置門,Vt 是 GRU網(wǎng)絡在 t 時刻的輸出,由前一時刻的輸出信息 Vt-1和當前記憶內容 V′t 組成的,利用更新門控制這兩類信息的流入。
GRU網(wǎng)絡更新權重參數(shù)公式如下:
式中:Xt為 GRU網(wǎng)絡在 t 時刻的輸入向量;wxz,wVz和bz分別為權重矩陣和偏差參數(shù);σ和 tanh 為激活函數(shù);⊙為按元素乘法。
傳統(tǒng) GRU 網(wǎng)絡傳遞信息方向為沿時間序列單向傳遞,只能獲取歷史時刻信息,忽略了未來時刻信息。而BiGRU雙向網(wǎng)絡,充分考慮了車輛振動響應樣本數(shù)據(jù)前后的時序信息,更準確地提取路面等級特征。
BiGRU網(wǎng)絡結構如圖3所示,圖中 GRU1表示正向 GRU , GRU2為反向 GRU 。正向隱藏層輸出 h1t 和反向隱藏層 h2t 輸出共同決定了BiGRU網(wǎng)絡在 t 時刻的隱藏層狀態(tài)ht。
1.4 Attention層
在處理時序問題時,Attention 賦予時序特征不同的權重,利用概率分配法,使得模型在訓練時重點關注占比更大的信息,提高模型精度[12]。因此,將 Attention 引入BiGRU網(wǎng)絡中,有效突出不同等級路面的車輛振動響應特征,提高識別準確率。Attention 層計算公式如下:
式中:st為 Attention 層得到的初始向量;ot為注意力權重系數(shù); Y 為 Attention 層的輸出向量;et 為注意力比重,該值越大,Vt 對路面等級表征的貢獻率越大;wt和bt分別為權重矩陣和偏差參數(shù)。
1.5 輸出層
為了生成各等級路面的識別率,輸出層選擇Softmax函數(shù)。Attention 層的輸出向量 Y 通過Softmax函數(shù)進行計算,進而得出各級路面識別率。計算公式如下:
式中:w1和 b1分別為 Attention 層到輸出層的權重矩陣和偏差參數(shù);yk為輸出結果。
2 不同等級路面輸入下車輛振動響應獲取
2.1 兩自由度1/4車輛振動模型建立
兩自由度1/4車輛模型結構簡單,利于分析,在研究懸架的垂向動力學方面得到廣泛的應用,模型如圖4所示。圖中,ms、mu 、ks、cs 、kt 、zs 、zu、zr、u分別表示車身質量、車輪質量、懸架剛度、懸架阻尼、輪胎剛度、車身垂向位移、車輪垂向位移、路面輸入位移、可控懸架阻尼力。
由牛頓第二定律,得到動力學微分方程為:
2.2 隨機輸入路面模型建立
通常將路面與基準面的水平相對高度與道路走向的變化稱為路面不平度函數(shù)[13]。
路面不平度函數(shù)是隨機函數(shù),常認為其均值為0且服從正態(tài)分布,且用功率譜密度表達其特性,其表達式為:
式中: n 為空間頻率;w 為頻率指數(shù);n0為參考空間頻率;Gq (n0)是路面不平度系數(shù)。
本文采用濾波白噪聲法生成路面時域模型。其表達式為:
為了確保仿真出來的路面情況與實際一致,將下截止頻率的值大概確定為0.01 Hz 附近。
2.3 不同等級路面輸入下車輛振動響應仿真
在不同等級路面下,車輛行駛時會產(chǎn)生不同的振動響應。因此,基于 MATLAB/Simulink應用2.1節(jié)和2.2節(jié)搭建的1/4車輛振動模型和隨機路面模型進行仿真實驗,生成不同路面等級下的車輛振動響應。
本文參照桑塔納3000轎車的車輛參數(shù),如表1所示,分別在 A 、B 、C 、D 四個等級路面下進行平順性仿真實驗,車速為20 km/h ,仿真時間為60 s ,采樣頻率為100 Hz ,最終得到各級路面下車輛響應信號,圖 5所示為 B 級路面車輛響應。
3 路面不平度等級識別模型建立
3.1 構造車輛振動響應數(shù)據(jù)集
基于車輛響應的路面不平度等級識別中,采集的車輛響應數(shù)據(jù)時間較長,如果對整段車輛響應信號直接提取特征,會導致得到的特征太大,不方便計算。因此,本文利用滑動窗口法,選擇滑動窗口為1 s ,將車輛響應數(shù)據(jù)截取為100的等長序列,為保留時序信號的連續(xù)性,前后兩個時間段之間有50%的重疊。構造的車輛振動響應數(shù)據(jù)集包含476個樣本數(shù)據(jù)段,將其隨機分成兩組, 80%為訓練集,20%為測試集,前者用于模型訓練,后者用于模型測試。
3.2 建立路面不平度等級識別模型
本文實驗進行的軟件環(huán)境:Python語言和Keras深度學習框架;硬件環(huán)境:Intel Core i5-4210U處理器和顯卡 AMD Radeon HD 8500 M。
在進行實驗前,為了提高路面等級分類器的收斂速度和識別準確度,對仿真數(shù)據(jù)集進行歸一化處理。本文利用 Adam優(yōu)化算法和交叉熵損失函數(shù)來訓練模型,優(yōu)化模型的擬合效果。圖6所示為BiGRU-Attention 模型在訓練過程中的損失函數(shù)曲線。BiGRU-Attention 模型的損失函數(shù)曲線呈現(xiàn)下降的趨勢,隨著迭代次數(shù)增多,損失函數(shù)值趨近于0。表明BiGRU-Attention 模型沒有出現(xiàn)過擬合,訓練效果好。經(jīng)過訓練,BiGRU-Attention 模型確定了路面等級與車輛振動響應之間的映射關系,建立了路面不平度等級識別模型。
3.3 結果分析
利用測試集對路面不平度等級識別模型進行評估測試。測試結果的混淆矩陣,如圖7所示。識別模型的預測類別與真實類別分布十分接近,誤差較小。產(chǎn)生錯誤的辨識主要集中在 B 級路面和 C級路面,這可能是因為兩級路面對應的車輛振動響應特征相似性較高,使得模型將其混淆,從而導致小部分路面不平度等級識別錯誤,與實際情況相符。
3.4 消融實驗
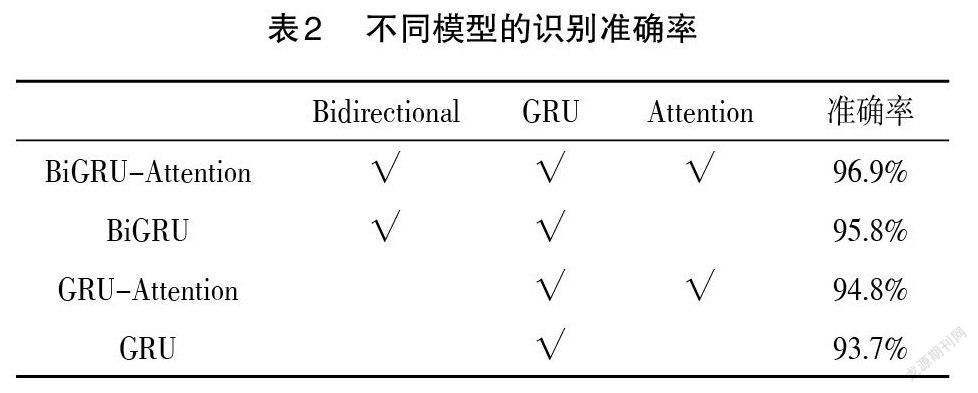
將本文提出的BiGRU-Attention 模型與常規(guī) GRU 模型、僅引入雙向循環(huán)機制的 GRU模型( BiGRU)和僅引入注意力機制的 GRU模型(GRU-Attention )在車輛振動響應數(shù)據(jù)集上進行消融實驗,驗證雙向循環(huán)機制和注意力機制對路面不平度等級識別的準確性。表2所示為不同辨識模型的結構和整體識別準確率。
與 GRU 模型相比,BiGRU模型的準確率提高了約2.1%,證明了雙向循環(huán)機制的有效性;GRU-Attention 模型的準確率提高了約1.1%,證明了注意力機制的有效性。本文所提算法模型識別準確率可達96.9%,對比 Bi- GRU、GRU-Attention、GRU 模型,識別準確率分別提升了1.1%、2.1%、3.2%。實驗結果表明,同時引入雙向傳播機制和注意力機制對 GRU模型辨識路面等級的效果顯著提升,能夠全面關注車輛振動響應特征變化情況,有效減少識別結果的誤判。
4 結束語
本文建立了基于BiGRU-Attention 路面不平度等級識別模型,考慮了BiGRU單元時刻的注意力貢獻率,提高算法的特征表示能力。路面不平度等級識別模型在1/4車輛振動模型平順性仿真實驗構造的車輛振動響應數(shù)據(jù)集上,識別率高達96.9%,識別結果可靠。在消融實驗中,該模型的辨識效果優(yōu)于其他基礎模型。因此,本文提出的基于BiGRU-Attention 路面不平度等級識別模型能夠準確識別路面不平度等級,為汽車動力學控制的參數(shù)調整提供有效的依據(jù),具有較高的工程應用價值。
今后的研究工作要結合大量的實車實驗構建更加完善的數(shù)據(jù)集,使得路面不平度等級識別模型涉及的路面情況更豐富,減少識別結果的誤差。
參考文獻:
[1] ASTM.ASTM E1274-03(2012). Standard Test Method for Mea- suring Pavement Roughness Using a Profilograph [S]. West Con- shohocken,PA:AmericanSocietyforTestingandMaterials, 2008.
[2]?uraulis V, Surblys V, Sabanovic E. Technological Measures of Forefront Road Identification for Vehicle Comfort and Safety Im- provement [J]. Transport, 2019, 34(3):363-372.
[3]劉秋, 孫晉偉, 張華, 等.基于卷積神經(jīng)網(wǎng)絡的路面識別及半主動懸架控制[J].兵工學報, 2020, 41(8):1483-1493.
[4] Nguyen T H, Nguyen T L, Sidorov D N, et al. Machine Learning Algorithms Application to Road Defects Classification [J]. Intelli- gent Decision Technologies, 2018(11):59-66.
[5]林聰, 時巖.基于非線性有源自回歸神經(jīng)網(wǎng)絡的路面不平度識別[J].南京理工大學學報, 2020, 44(3):296-302.
[6] Zhao Zheng, Chen Weihai, Wu Xingming, et al. LSTM network: A Deep Learning Approach for Short-term Traffic Forecast [J]. IET Intelligent Transport Systems, 2017, 11(2):68-75.
[7]丁松濤, 曲仕茹.基于深度學習的交通目標感興趣區(qū)域檢測[J].中國公路學報, 2018, 31(9):167-174, 15.
[8] Konoplich G V, Putin E O, Filchenkov A A. Application of Deep Learning to the Problem of Vehicle Detection in UAV Images [C]// Proc of the 19th IEEE International Conference on Soft Computing and Measurements. New York: IEEE, 2016.
[9]蔡英鳳, 邰康盛, 王海, 等.無人駕駛汽車周邊車輛行為識別算法研究[J].汽車工程, 2020, 42(11):1464-1472.
[10] Hochreiter S, Schmidhuber J. Long Short-term memory [J]. Neu- ral Computation,1997,9(8):1735-1780.
[11] Cho K,VanMerrienboerB,GulcehreC,et al. Learning Phrase RepresentationsUsingRNNEncoder-decoderforStatistical Machine Translation [J]. Computer Science, 2014.
[12]朱銘康, 盧先領.基于 Bi-LSTM-Attention模型的人體行為識別算法[J].激光與光電子學進展, 2019, 56(15):153-161.
[13]喻凡, 林逸.汽車系統(tǒng)動力學[M].2版.北京:機械工業(yè)出版社, 2017.
第一作者簡介:薛俊俊(1997-),女,山東臨沂人,碩士研究生,研究領域為車輛系統(tǒng)動力學及控制。
※通信作者簡介:陳雙(1979-),女,遼寧錦州人,博士,副教授,研究領域為汽車動態(tài)仿真與控制。
(編輯:刁少華)
猜你喜歡
中國教育技術裝備(2016年19期)2016-12-27 19:23:52
中國遠程教育(2016年11期)2016-12-27 18:07:31
現(xiàn)代商貿工業(yè)(2016年25期)2016-12-26 09:58:02
江蘇教育·中學教學版(2016年11期)2016-12-21 11:45:08
江蘇教育·中學教學版(2016年11期)2016-12-21 11:36:29
現(xiàn)代情報(2016年10期)2016-12-15 11:50:53
考試周刊(2016年94期)2016-12-12 12:15:04
新教育時代·教師版(2016年23期)2016-12-06 06:02:38
法制與社會(2016年32期)2016-12-01 15:25:53
軟件導刊(2016年9期)2016-11-07 22:20:49
