基于動(dòng)力學(xué)仿真的齒軌車(chē)輛限界研究
2021-08-20 08:53:58溫炎豐黃運(yùn)華
機(jī)械工程與自動(dòng)化 2021年3期
關(guān)鍵詞:設(shè)備
趙 軒,溫炎豐,吳 曉,王 建,楊 陽(yáng),黃運(yùn)華
(1.西南交通大學(xué) 機(jī)械工程學(xué)院,四川 成都 610031;2.中國(guó)中鐵二院工程集團(tuán)有限公司,四川 成都 610031)
0 引言
齒軌交通在國(guó)外已有很長(zhǎng)應(yīng)用歷史,但在國(guó)內(nèi)仍屬新鮮事物。相比于普通鐵路,齒軌鐵路在特定線(xiàn)路的軌枕上安裝有一條齒軌。同時(shí),齒軌車(chē)輛轉(zhuǎn)向架上配備了一個(gè)或多個(gè)與齒軌相嚙合的齒輪,在坡度較大的山地環(huán)境行駛時(shí),通過(guò)齒輪與齒軌嚙合以驅(qū)動(dòng)車(chē)輛行駛,使車(chē)輛克服輪軌黏著驅(qū)動(dòng)時(shí)黏著力不足的問(wèn)題。齒軌鐵路具有車(chē)輛爬坡能力較強(qiáng)、運(yùn)載能力良好以及對(duì)環(huán)境破壞小等優(yōu)點(diǎn),適合作為山地觀光線(xiàn)路[1,2]。
為了保障軌道車(chē)輛在線(xiàn)路上的安全行駛,限界成為了軌道車(chē)輛及線(xiàn)路系統(tǒng)設(shè)計(jì)的重要一環(huán)。車(chē)輛限界是指機(jī)車(chē)車(chē)輛橫斷面不允許超越的最大輪廓尺寸,車(chē)輛在空車(chē)或重車(chē)狀態(tài),均不得超過(guò)車(chē)輛限界。此外,車(chē)輛限界反映了車(chē)輛動(dòng)態(tài)偏移后的軌跡,包含了正常運(yùn)行下的各種限定因素,對(duì)于沿線(xiàn)設(shè)備線(xiàn)纜等布置有著重要的影響[3]。作為新制式軌道交通車(chē)輛的齒軌車(chē)輛,國(guó)內(nèi)尚未有齒軌車(chē)輛相關(guān)的限界標(biāo)準(zhǔn),故有必要對(duì)齒軌車(chē)輛限界進(jìn)行分析計(jì)算。
限界計(jì)算方法有動(dòng)力學(xué)計(jì)算法和公式計(jì)算法。羅仁等[4]指出相對(duì)于用公式計(jì)算限界的方法,動(dòng)力學(xué)仿真方法不需要人為確定懸掛偏移量,且能考慮車(chē)速、風(fēng)載、線(xiàn)路條件、車(chē)輛參數(shù)﹑輪軌磨耗狀態(tài)等因素的影響。王愛(ài)彬等[5,6]指出理論公式計(jì)算出的限界結(jié)果要比動(dòng)力學(xué)方法結(jié)果偏大,偏于保守,動(dòng)力學(xué)限界計(jì)算方式與實(shí)際更接近。張力波[7]、吳曉等[8]采用了動(dòng)力學(xué)方法對(duì)新型軌道交通的限界進(jìn)行了計(jì)算分析。基于以上研究,本文針對(duì)一種齒軌車(chē)輛,參考CJJ96—2003《地鐵限界標(biāo)準(zhǔn)》[9]的計(jì)算原則,基于動(dòng)力學(xué)仿真對(duì)齒軌車(chē)輛的車(chē)輛限界、直線(xiàn)設(shè)備限界、曲線(xiàn)設(shè)備限界進(jìn)行計(jì)算。
1 動(dòng)力學(xué)計(jì)算模型
根據(jù)齒軌車(chē)輛的結(jié)構(gòu)特點(diǎn),在SIMPACK動(dòng)力學(xué)仿真分析軟件中建立單節(jié)車(chē)輛動(dòng)力學(xué)模型。建模時(shí),建立最大磨耗狀態(tài)下的輪軌模型,將側(cè)風(fēng)載荷和偏心載荷考慮為集中力的形式,其中側(cè)風(fēng)作用點(diǎn)為車(chē)體側(cè)墻的形心,風(fēng)載荷考慮400 N/m2,偏載作用點(diǎn)為距車(chē)體重心橫向100 mm處。軌道的不平順因素采用激勵(lì)模擬,齒軌車(chē)運(yùn)行于普通線(xiàn)路上,激勵(lì)選用美國(guó)五級(jí)譜。
在忽略各部件本身彈性變形的條件下,齒軌車(chē)輛可作為離散的多自由度系統(tǒng)來(lái)處理。車(chē)輛包含的每個(gè)剛體均有6個(gè)自由度,其中包括伸縮、橫移、沉浮、側(cè)滾、點(diǎn)頭、搖頭。整車(chē)系統(tǒng)包括1個(gè)車(chē)體、2個(gè)構(gòu)架以及4組輪對(duì)并均將其視為剛體,共計(jì)7個(gè)剛體、42個(gè)自由度。車(chē)輛結(jié)構(gòu)拓?fù)鋱D如圖1所示。

圖1 車(chē)輛結(jié)構(gòu)拓?fù)鋱D
該單節(jié)齒軌車(chē)輛動(dòng)力學(xué)模型包括車(chē)體與兩個(gè)轉(zhuǎn)向架以及其他連接結(jié)構(gòu)。根據(jù)車(chē)輛和轉(zhuǎn)向架的具體結(jié)構(gòu)形式以及建模需求,對(duì)于一系鋼彈簧、一系垂向阻尼、牽引拉桿、二系橫向阻尼、空氣彈簧、橫向止擋、一系彈簧止擋、空氣彈簧氣囊下的緊急彈簧或橡膠、抗側(cè)滾扭桿等彈性元件,在SIMPACK建模軟件中使用力元模擬。建立的齒軌車(chē)輛動(dòng)力學(xué)模型如圖2所示。
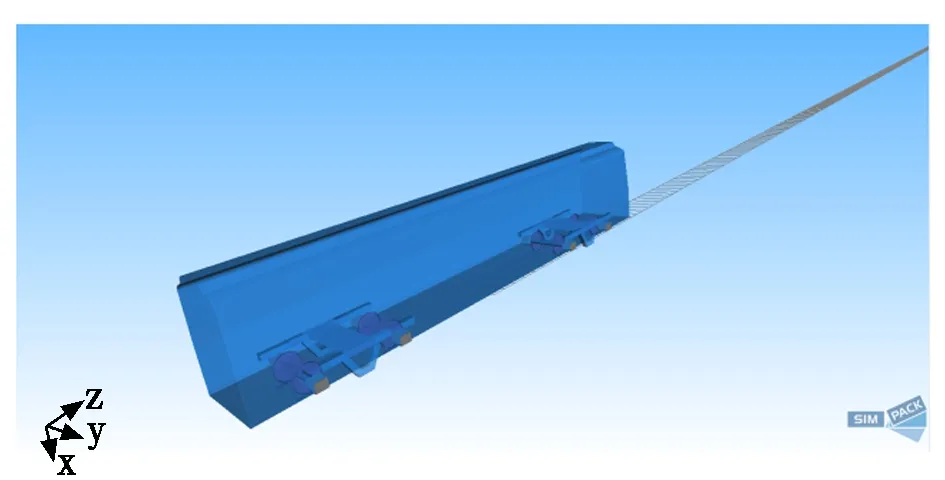
圖2 齒軌車(chē)輛動(dòng)力學(xué)模型
2 限界動(dòng)力學(xué)仿真分析方法及計(jì)算工況
2.1 齒軌車(chē)輛限界動(dòng)力學(xué)仿真分析方法
仿真車(chē)輛限界前首先需根據(jù)車(chē)輛結(jié)構(gòu)來(lái)確定車(chē)輛橫斷面上的控制點(diǎn),控制點(diǎn)的選取應(yīng)充分考慮車(chē)體等部件上的最大偏移位置,連線(xiàn)控制點(diǎn)作為計(jì)算車(chē)輛輪廓線(xiàn)。根據(jù)得到的車(chē)輛輪廓控制點(diǎn)坐標(biāo),繪制出齒軌車(chē)輛的輪廓線(xiàn)。根據(jù)獲得的車(chē)輛輪廓線(xiàn)各個(gè)控制點(diǎn)的坐標(biāo)值,在單節(jié)齒軌車(chē)輛模型中設(shè)置marker點(diǎn),這些marker點(diǎn)按照控制點(diǎn)所屬的部位建立在車(chē)輛對(duì)應(yīng)的部位上。仿真模型的坐標(biāo)系中也根據(jù)所有控制點(diǎn)的坐標(biāo)值建立關(guān)于所有控制點(diǎn)的marker點(diǎn),利用sensor(傳感器)的功能,在SIMPACK后處理文件中直接獲取控制點(diǎn)在仿真過(guò)程中的垂向和橫向偏移量,將獲得的垂向、橫向偏移量與車(chē)輛輪廓線(xiàn)疊加后,便得到其車(chē)輛限界。其中直線(xiàn)設(shè)備限界由車(chē)輛動(dòng)態(tài)偏移量疊加故障工況額外偏移量得到;曲線(xiàn)設(shè)備限界由車(chē)輛動(dòng)態(tài)偏移量疊加故障和曲線(xiàn)幾何導(dǎo)致的額外偏移量得到。
2.2 齒軌車(chē)輛限界動(dòng)力學(xué)仿真分析工況
參考國(guó)外現(xiàn)有齒軌車(chē)輛參數(shù)[10]以及四川省地方標(biāo)準(zhǔn)DB51/T2542—2018《山地(齒軌)軌道交通技術(shù)規(guī)范》[11],齒軌車(chē)輛在齒軌段運(yùn)行時(shí)最高速度不超過(guò)40 km/h,普通線(xiàn)路段運(yùn)營(yíng)最高速度為120 km/h。圖3為齒軌車(chē)輛輪廓線(xiàn)圖,圖4為直線(xiàn)工況齒軌車(chē)輛20 km/h~120 km/h速度下的部分車(chē)肩控制點(diǎn)橫移量。分析圖4可知,車(chē)輛在高運(yùn)營(yíng)車(chē)速下車(chē)體控制點(diǎn)位移量相對(duì)更大。齒軌車(chē)輛的車(chē)輛限界應(yīng)同時(shí)滿(mǎn)足普通路段和齒軌線(xiàn)路的要求,因此,在普通路段對(duì)齒軌車(chē)輛的限界進(jìn)行仿真,模型仿真速度設(shè)置為車(chē)輛的最高運(yùn)營(yíng)速度120 km/h。由于仿真速度高于40 km/h,本文不考慮齒輪與軌道嚙合對(duì)齒軌車(chē)輛限界的影響,只需考慮齒輪在車(chē)輛運(yùn)行過(guò)程中的橫移量。曲線(xiàn)線(xiàn)路參數(shù)和速度設(shè)置如表1所示。

表1 曲線(xiàn)線(xiàn)路參數(shù)和速度設(shè)置
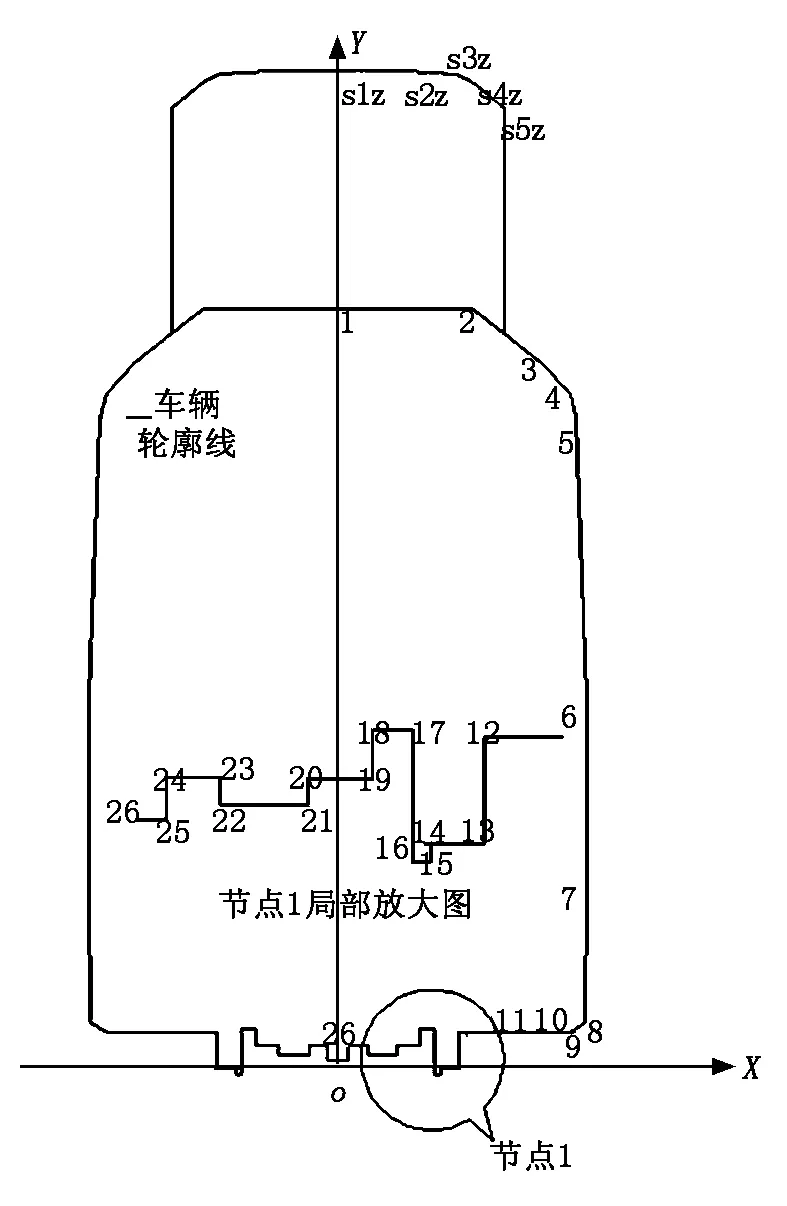
圖3 齒軌車(chē)輛輪廓線(xiàn)
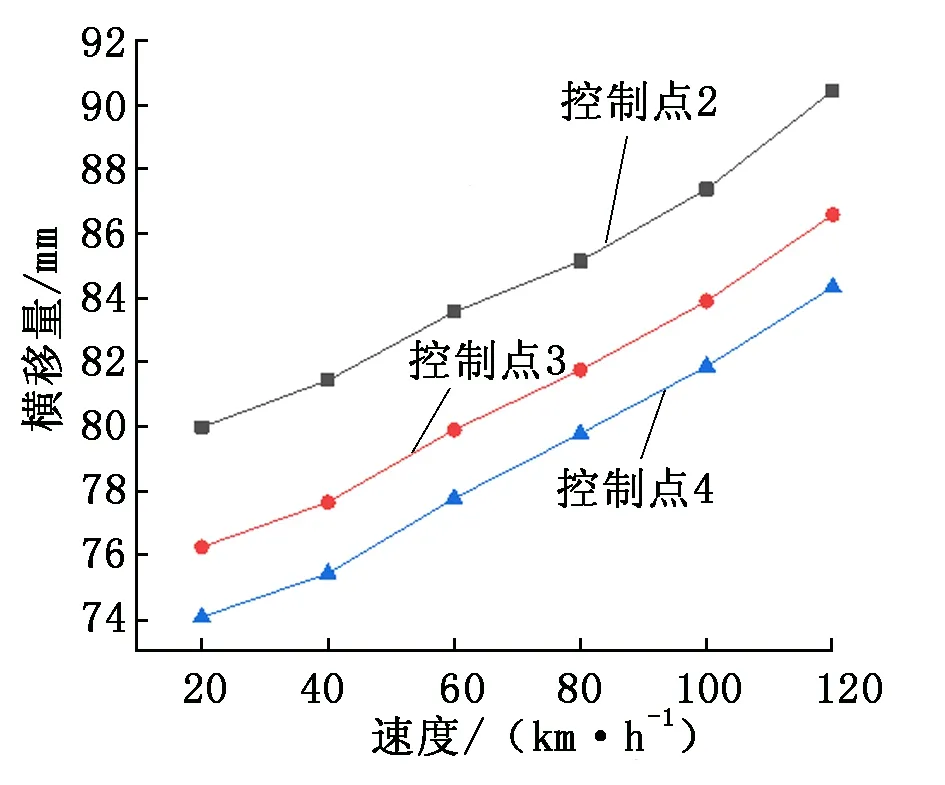
圖4 齒軌車(chē)輛不同速度下的部分控制點(diǎn)橫移量
3 計(jì)算結(jié)果分析
3.1 齒軌車(chē)輛的車(chē)輛限界

通過(guò)動(dòng)力學(xué)仿真,模擬齒軌車(chē)輛在平直軌道上的運(yùn)行,計(jì)算并記錄其控制點(diǎn)的橫向、垂向位移量,其中受電弓控制點(diǎn)以及車(chē)體上1號(hào)~6號(hào)控制點(diǎn)記錄垂向上偏移量,其余控制點(diǎn)記錄向下偏移量,轉(zhuǎn)向架上16、17、22、23號(hào)控制點(diǎn)記錄向左偏移量,其余控制點(diǎn)記錄向右偏移量。經(jīng)仿真結(jié)果分析,發(fā)現(xiàn)第2種工況組合下偏移量較大,因此以第2種工況下的動(dòng)力學(xué)仿真結(jié)果作為車(chē)輛限界。動(dòng)力學(xué)仿真得到的齒軌車(chē)輛輪廓線(xiàn)與車(chē)輛限界如圖5所示。其中,1~7為車(chē)體控制點(diǎn),8~26為轉(zhuǎn)向架控制點(diǎn),13、14為踏面控制點(diǎn),15、16為輪緣控制點(diǎn),s1z~s5z為受電弓控制點(diǎn),下同。
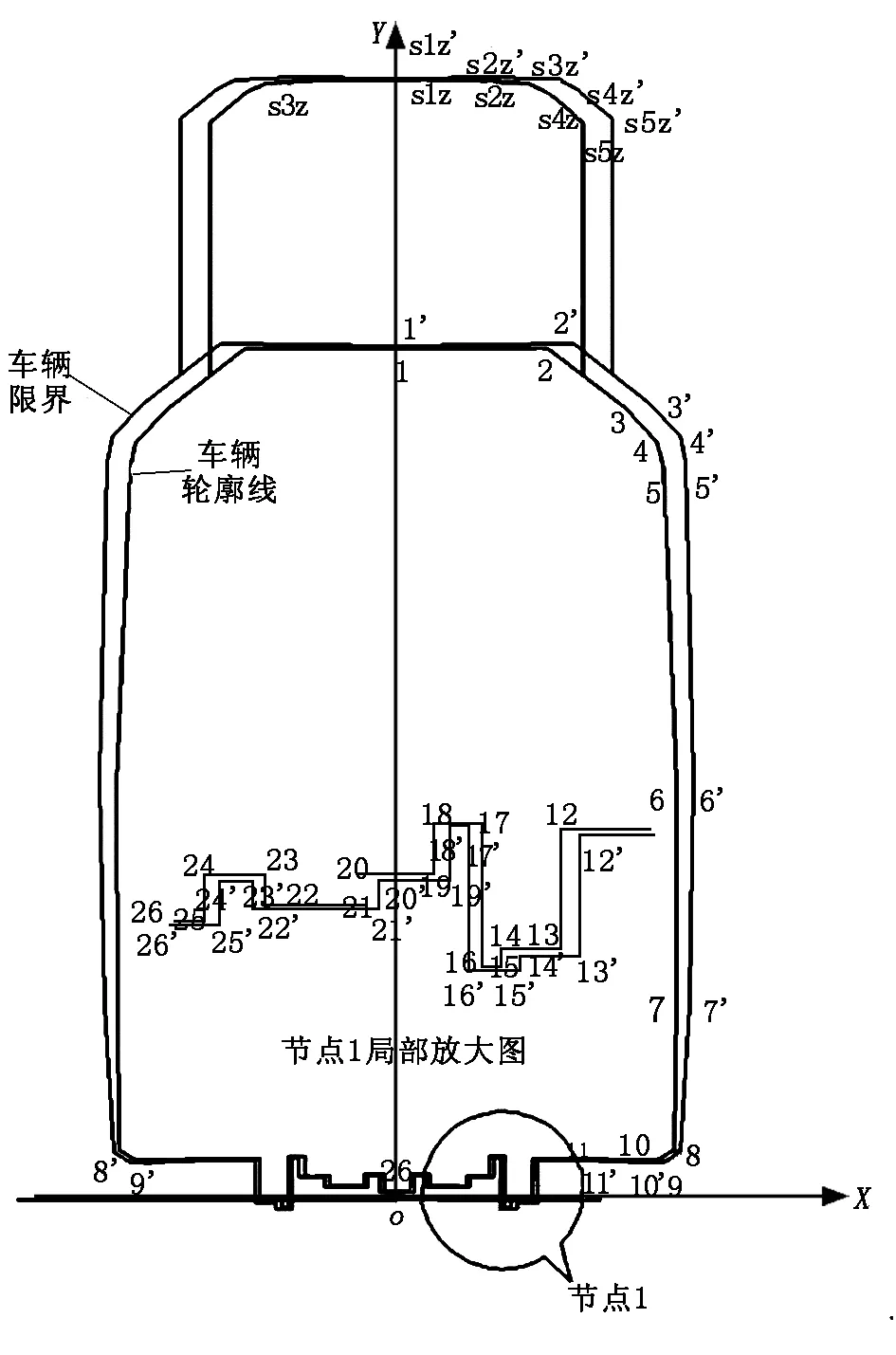
圖5 齒軌車(chē)輛輪廓線(xiàn)與車(chē)輛限界
3.2 齒軌車(chē)輛的直線(xiàn)設(shè)備限界
模型中空氣彈簧和一系鋼彈簧設(shè)有兩個(gè)剛度,一個(gè)是自身剛度,另一個(gè)是垂向止擋剛度,垂向止擋力特性如圖6所示。針對(duì)空氣彈簧和一系鋼彈簧失效工況,將空氣彈簧和一系鋼彈簧剛度設(shè)置為0 N/m,空氣彈簧膨脹工況則考慮為某個(gè)由于故障而膨脹的空氣彈簧膨脹到最大限度且其剛度極大。
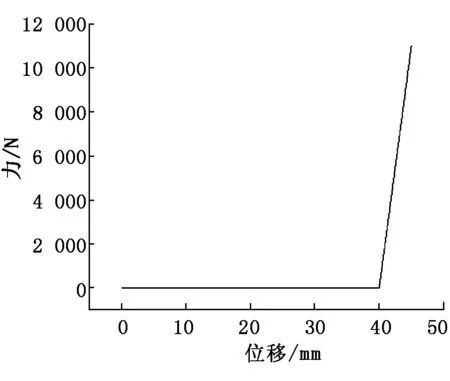
圖6 空氣彈簧垂向止擋特性曲線(xiàn)
齒軌車(chē)輛的直線(xiàn)設(shè)備限界由車(chē)輛動(dòng)態(tài)偏移量疊加故障工況額外偏移量得到。受電弓控制點(diǎn)以及車(chē)體上1號(hào)~6號(hào)控制點(diǎn)取空氣彈簧過(guò)充氣導(dǎo)致的向上偏移量,車(chē)體上7號(hào)控制點(diǎn)取空氣彈簧失氣工況導(dǎo)致的向下偏移量,車(chē)體1~7控制點(diǎn)均取空氣彈簧膨脹和失氣情況下的最大橫向偏移量,從而構(gòu)成齒軌車(chē)輛的直線(xiàn)設(shè)備限界,如圖7所示。
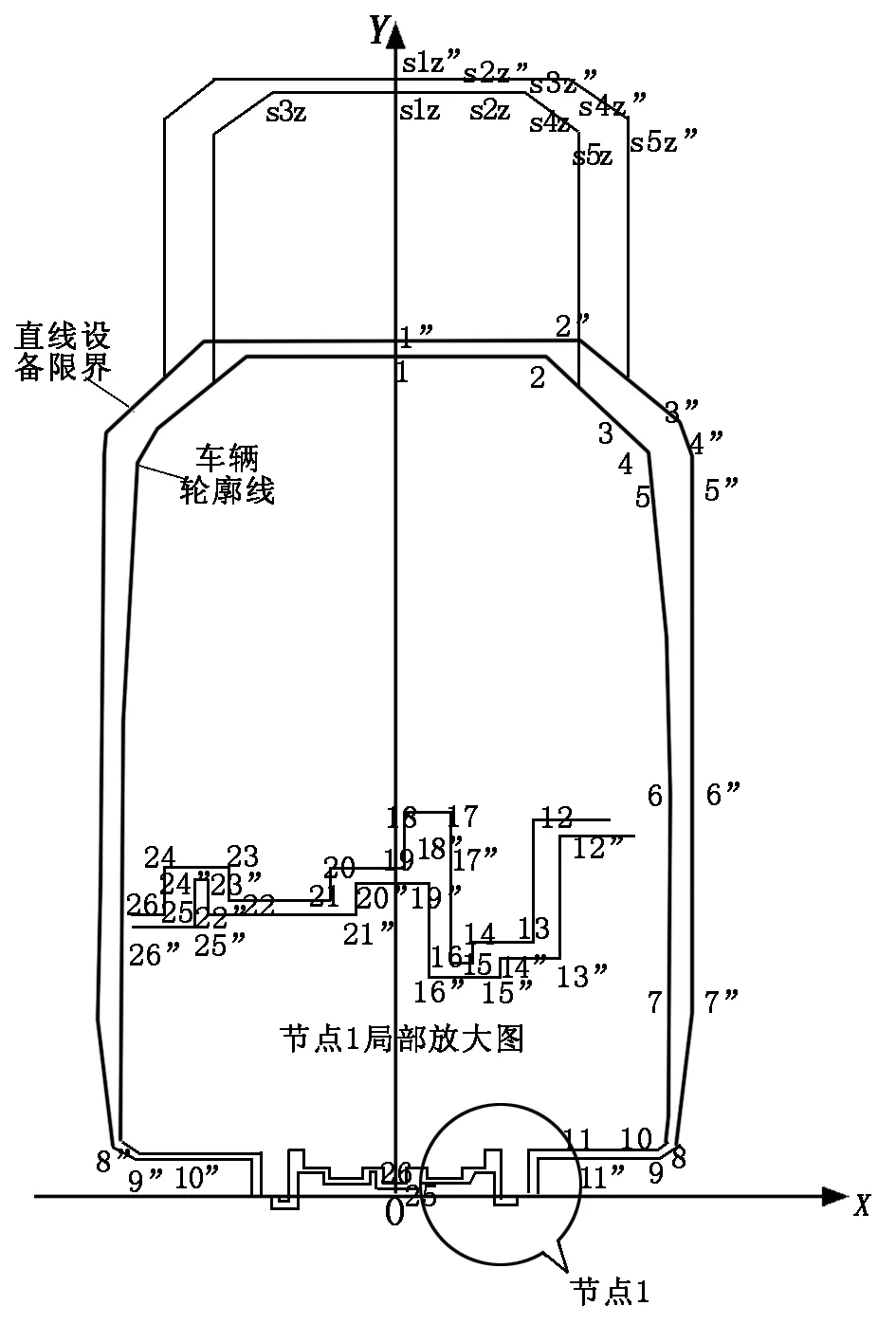
圖7 齒軌車(chē)輛輪廓線(xiàn)與車(chē)輛直線(xiàn)設(shè)備限界
3.3 齒軌車(chē)輛的曲線(xiàn)設(shè)備限界
曲線(xiàn)設(shè)備限界是在直線(xiàn)設(shè)備限界的基礎(chǔ)上,綜合車(chē)輛在曲線(xiàn)通過(guò)時(shí)由于曲線(xiàn)幾何偏移、過(guò)超高或欠超高以及軌道或車(chē)輛參數(shù)變化引起的額外偏移量,從而得到的曲線(xiàn)地段下的設(shè)備限界。故障導(dǎo)致的車(chē)體垂向和橫向位移取值與3.2中的直線(xiàn)設(shè)備限界相同,此處不再贅述。齒軌車(chē)輛的曲線(xiàn)設(shè)備限界由車(chē)輛動(dòng)態(tài)偏移量疊加故障和曲線(xiàn)造成的額外偏移量得到。齒軌車(chē)輛曲線(xiàn)設(shè)備限界考慮車(chē)輛以時(shí)速60 km/h通過(guò)半徑為200 m曲線(xiàn)時(shí)的曲線(xiàn)段設(shè)備限界,如圖8所示。
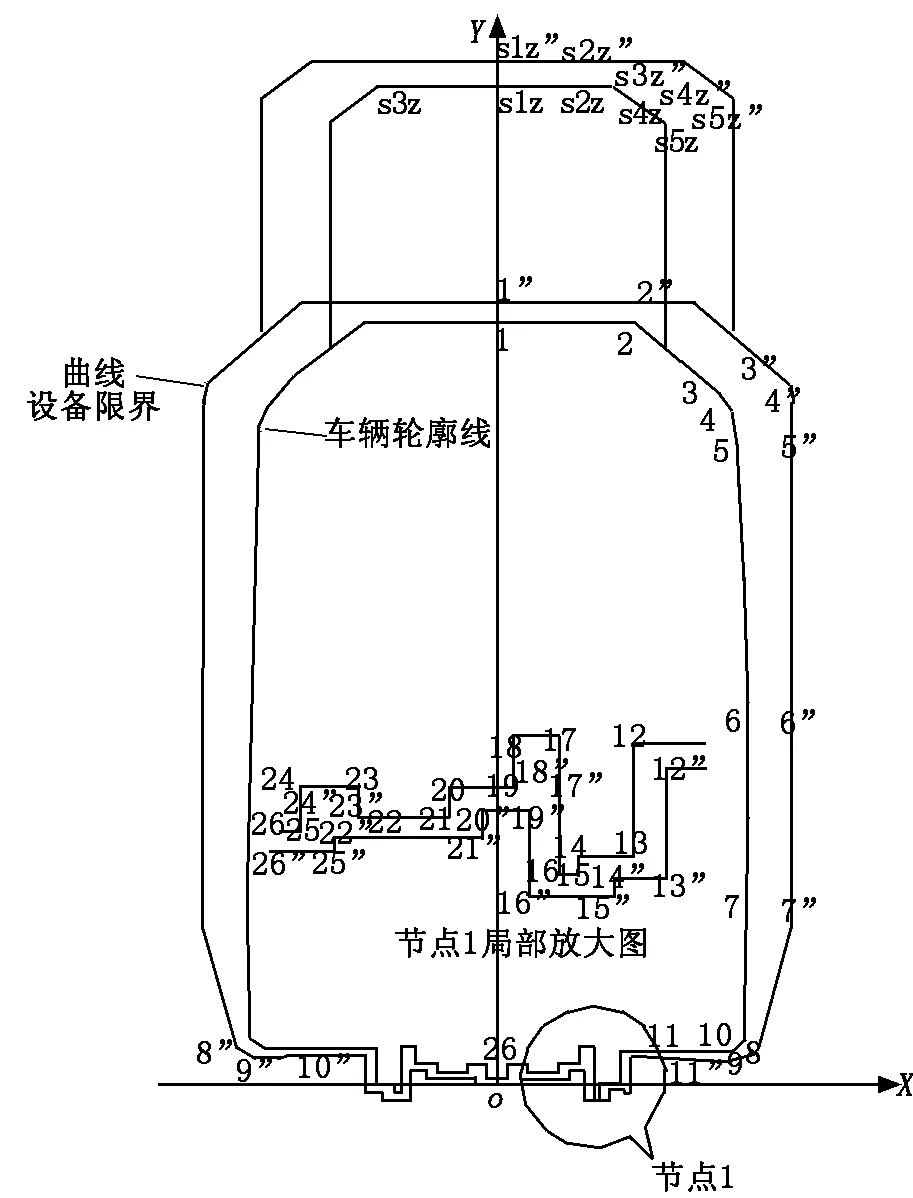
圖8 齒軌車(chē)輛輪廓線(xiàn)與車(chē)輛曲線(xiàn)設(shè)備限界
4 結(jié)論
目前我國(guó)尚未有齒軌車(chē)輛相關(guān)的限界標(biāo)準(zhǔn),因此本文針對(duì)某型齒軌車(chē)輛建立了其動(dòng)力學(xué)仿真模型,在動(dòng)力學(xué)仿真的基礎(chǔ)上獲得了齒軌車(chē)輛的車(chē)輛限界和設(shè)備限界輪廓圖,可為齒軌交通的工程設(shè)計(jì)提供一定的參考。由于動(dòng)力學(xué)仿真計(jì)算限界尚難以模擬各個(gè)結(jié)構(gòu)的制造和安裝誤差且仿真難以模擬真實(shí)環(huán)境,因此在工程設(shè)計(jì)中還需考慮車(chē)輛的制造誤差和影響車(chē)輛運(yùn)行的多種外界因素,以獲得更加準(zhǔn)確的限界。
猜你喜歡
中國(guó)特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
當(dāng)代工人(2020年13期)2020-09-27 23:04:20
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(shù)(2017年11期)2017-12-20 08:10:57
工業(yè)設(shè)計(jì)(2016年12期)2016-04-16 02:52:00
IT時(shí)代周刊(2015年8期)2015-11-11 05:50:37
汽車(chē)維修與保養(yǎng)(2015年1期)2015-04-17 03:25:28
設(shè)備管理與維修(2015年12期)2015-04-09 06:57:00