全方位行走AGV貨物搬運(yùn)車升運(yùn)機(jī)構(gòu)設(shè)計(jì)
2021-08-20 08:54:04張立城姜勇峰曹曉悅高欣欣
機(jī)械工程與自動(dòng)化 2021年3期
王 茜,王 琦,張立城,姜勇峰,曹曉悅,高欣欣
(1.哈爾濱理工大學(xué)榮成學(xué)院,山東 威海 264300;2.山東美晨工業(yè)集團(tuán),山東 濰坊 262200)
0 引言
在“中國制造2025”工業(yè)發(fā)展背景下,一大批智能化、模塊化的高效工業(yè)機(jī)器人應(yīng)運(yùn)而生[1],隨之而來的是對控制精度、生產(chǎn)效率的更高要求,所以貨物運(yùn)輸效率作為生產(chǎn)效率的主要影響因素之一必然受到更高的重視。全方位行走AGV貨物搬運(yùn)車是高效快速運(yùn)輸方式的新寵,在加工、智能運(yùn)輸?shù)雀鱾€(gè)方面有著優(yōu)良的表現(xiàn),其市場前景非常廣闊[2,3]。
由《機(jī)器人產(chǎn)業(yè)發(fā)展規(guī)劃(2016—2020年)》可知,2018年中國的AGV相關(guān)產(chǎn)品市場新增量已達(dá)到了2.96萬臺(tái),相比較于2017年,實(shí)現(xiàn)了35%的增長。預(yù)計(jì)在未來5年內(nèi),中國AGV機(jī)器人市場規(guī)模將會(huì)達(dá)到數(shù)百億元[4]。
1 全方位行走AGV貨物搬運(yùn)車整體設(shè)計(jì)思路
全方位行走AGV貨物搬運(yùn)車的整體設(shè)計(jì)思路為:在保證強(qiáng)度、剛度的前提下,實(shí)現(xiàn)AGV零轉(zhuǎn)彎半徑的全向移動(dòng),且運(yùn)行平穩(wěn)可靠,同時(shí)將機(jī)構(gòu)優(yōu)化,最大程度上減輕機(jī)構(gòu)質(zhì)量、提高貨物搬運(yùn)的效率。在安全防護(hù)方面,本裝置增加了側(cè)部護(hù)板并做了邊緣除銳角工作,最大程度上避免硬性碰撞,將人身安全和設(shè)備安全做到最好保護(hù);車身底部還配有開關(guān)門,便于電路的檢修以及電池的更換;控制系統(tǒng)、電源管理模塊、無線通信模塊、伺服電機(jī)以及配套的行星減速器均裝配于車體內(nèi)部,這樣在模塊化的基礎(chǔ)上又優(yōu)化了使用空間,同時(shí)也減輕了總體質(zhì)量,提高了運(yùn)動(dòng)的穩(wěn)定性。AGV貨物搬運(yùn)車三維模型如圖1所示。
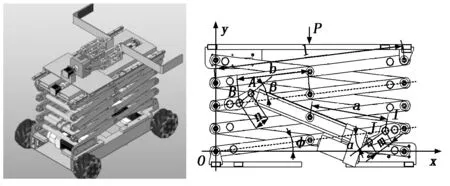
圖1 AGV貨物搬運(yùn)車 圖2 升運(yùn)機(jī)構(gòu)尺寸三維模型
2 升運(yùn)機(jī)構(gòu)的設(shè)計(jì)
2.1 設(shè)計(jì)要求及參數(shù)
考慮到具體的工作環(huán)境和設(shè)備的承載能力,對升運(yùn)機(jī)構(gòu)提出如下設(shè)計(jì)要求:
(1) 最大升起高度≥1 800 mm,最小回落高度≤500 mm。
(2) 平臺(tái)承載≥130 kg,設(shè)備自重≤100 kg。
(3) 在剪叉機(jī)構(gòu)起升過程中,推桿與剪叉臂之間不發(fā)生干涉。
(4) 推桿與剪叉臂的連接位置應(yīng)滿足推桿行程要求。
在如圖2所示的Oxy平面直角坐標(biāo)系中,影響電動(dòng)推桿安裝位置和鉸耳尺寸設(shè)計(jì)的參數(shù)[5]有:上、下鉸耳的長度m和n,剪叉臂中心與上鉸耳的距離b,下鉸耳與剪叉臂中心距a,下鉸耳與剪叉臂之間的角度α,上鉸耳與剪叉臂之間的角度β,剪叉臂的長度l。
升運(yùn)機(jī)構(gòu)的相關(guān)尺寸參數(shù)如表1所示。

表1 升運(yùn)機(jī)構(gòu)設(shè)計(jì)參數(shù)
2.2 運(yùn)動(dòng)學(xué)分析
升運(yùn)機(jī)構(gòu)的運(yùn)動(dòng)學(xué)分析就是得到剪叉機(jī)構(gòu)的運(yùn)動(dòng)與執(zhí)行機(jī)構(gòu)輸出運(yùn)動(dòng)的聯(lián)系,并分析機(jī)構(gòu)運(yùn)動(dòng)的合理性[6]。由于升運(yùn)機(jī)構(gòu)的外載荷僅作用在節(jié)點(diǎn)上,則重點(diǎn)計(jì)算節(jié)點(diǎn)的運(yùn)動(dòng)規(guī)律,如從位移、速度和加速度三個(gè)方面對其進(jìn)行分析[7]。
2.2.1 正向運(yùn)動(dòng)學(xué)分析
建立直角坐標(biāo)系Oxy,如圖3所示,坐標(biāo)原點(diǎn)O與第一級空間剪叉單元的頂點(diǎn)A0重合,通過計(jì)算Ai、Bi的運(yùn)動(dòng)特性,即可分析出其他各節(jié)點(diǎn)的運(yùn)動(dòng)情況。在剪叉機(jī)構(gòu)中設(shè)A0為固定點(diǎn),由于整個(gè)結(jié)構(gòu)正交分布,為了研究方便,僅討論一個(gè)剪叉列上由B向A的直線運(yùn)動(dòng)。
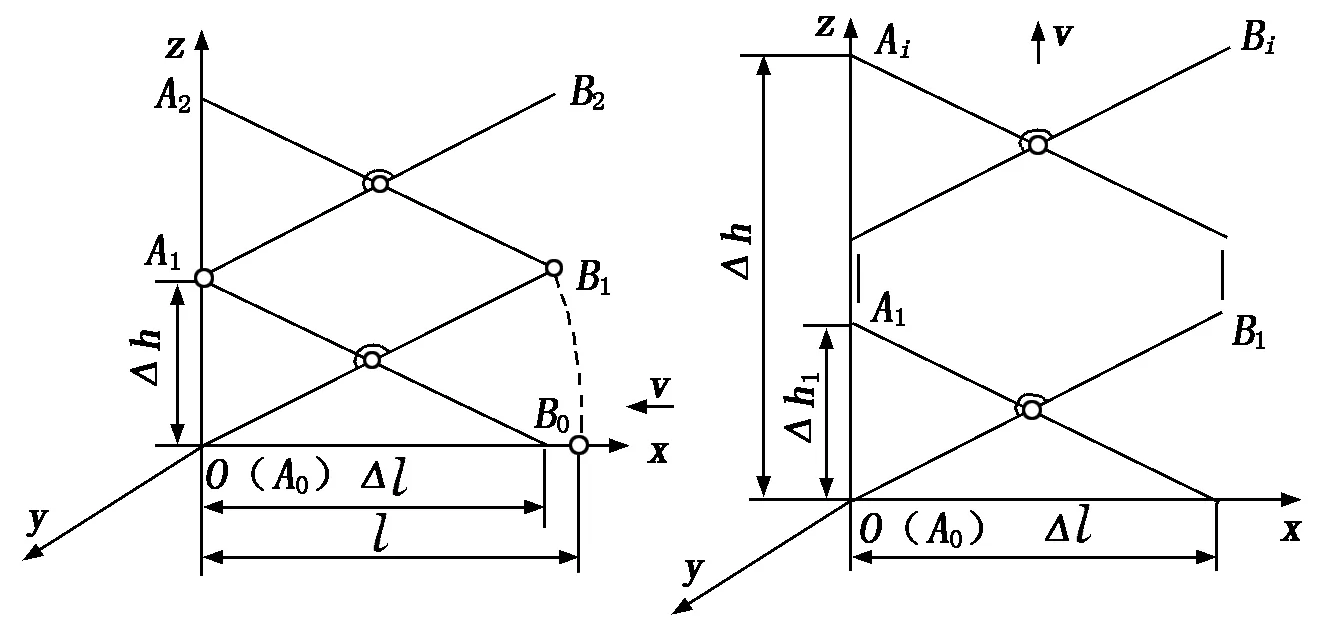
圖3 正向運(yùn)動(dòng)坐標(biāo)建立 圖4 逆向運(yùn)動(dòng)坐標(biāo)建立
對升運(yùn)機(jī)構(gòu)進(jìn)行正向運(yùn)動(dòng)學(xué)分析,即已知推桿的運(yùn)動(dòng),求輸出端豎直運(yùn)動(dòng)[8]。設(shè)組成剪叉單元的桿長為l,初始條件為剪叉機(jī)構(gòu)完全收縮位置,即A0B0桿與x軸的初始夾角為0°。節(jié)點(diǎn)Bi向Ai直線運(yùn)動(dòng),移動(dòng)速度為v,推桿速度為v′,推桿與x軸夾角為θ,則有v=v′·cosθ。則Ai節(jié)點(diǎn)初始的坐標(biāo)位置,以矩陣的形式表示為:
Ai0=[0 0]T.
其中:Ai0表示Ai節(jié)點(diǎn)的初始坐標(biāo),i=1,2,3,4。
則經(jīng)過時(shí)間t,第一級剪叉單元跨度和高度分別為:
Δl=l-vt.
(1)
(2)
節(jié)點(diǎn)的坐標(biāo)位置變?yōu)椋?/p>
(3)
用vx、vy表示慣性坐標(biāo)系Oxy中的速度分量,用ax、ay表示其在慣性坐標(biāo)系Oxy中的加速度分量。公式(3)兩邊對時(shí)間t求一階導(dǎo),可以得到速度方程,即節(jié)點(diǎn)Ai的速度為:
(4)
對式(4)求導(dǎo)可以得到加速度方程,即節(jié)點(diǎn)Ai的加速度為:
(5)
2.2.2 逆向運(yùn)動(dòng)學(xué)分析
逆向動(dòng)力學(xué)分析就是由剪叉桿輸出端的豎直運(yùn)動(dòng)得到輸入的水平運(yùn)動(dòng)。建立如圖4所示直角坐標(biāo)系。
已知Ai節(jié)點(diǎn)的y軸向直線速度為v,則B0節(jié)點(diǎn)初始坐標(biāo)位置為:
B0=[l0]T.
則經(jīng)過時(shí)間t,Ai的位移為:
Δh=vt.
(6)
第一級剪叉單元高度為:
Δh1=vt/ii=1,2,3,4.
(7)
則B0節(jié)點(diǎn)的位置變?yōu)椋?/p>
(8)
由式(8)分別求對時(shí)間t的一、二階導(dǎo)數(shù),得B0的速度和加速度分別為:
(9)
(10)
2.2.3 分析結(jié)果
經(jīng)上述計(jì)算以及ADAMS運(yùn)動(dòng)學(xué)仿真,得出位移、速度和加速度相對于時(shí)間變化的曲線,如圖5所示,結(jié)果證明該升運(yùn)機(jī)構(gòu)運(yùn)動(dòng)平穩(wěn),動(dòng)態(tài)性能良好。

圖5 運(yùn)動(dòng)學(xué)分析結(jié)果
3 升運(yùn)機(jī)構(gòu)的拓?fù)鋬?yōu)化及鉸耳的有限元分析
3.1 建立模型
常見的優(yōu)化模型有兩種建立方法:
(1) 利用ANSYS有限元軟件中自帶的DM模塊進(jìn)行設(shè)計(jì),這樣可以將幾何特征完全導(dǎo)入優(yōu)化模塊,便于模型的優(yōu)化及后處理[9]。
(2) 用CREO等進(jìn)行三維建模,再另存為.x_t或.step等通用格式,同時(shí)可把有限元軟件和三維建模軟件相關(guān)聯(lián),方便模型的修改和數(shù)據(jù)的轉(zhuǎn)換。
由于Workbench的DM模塊三維建模能力較弱,面對特征較多、機(jī)構(gòu)復(fù)雜的零件建模速度較慢,而且沒有裝配功能,而升運(yùn)機(jī)構(gòu)的零件繁多,所以本文采用第2種方法建模。
3.2 材料特性
除選擇銅套便于實(shí)現(xiàn)自潤滑功能外,選擇Q235作為整個(gè)升運(yùn)機(jī)構(gòu)材料,材料特性參數(shù)如表2所示。

表2 升運(yùn)機(jī)構(gòu)材料特性參數(shù)
3.3 單元選取及網(wǎng)格劃分
采用子模型法,對機(jī)構(gòu)的整體進(jìn)行自由網(wǎng)格劃分,然后再對局部進(jìn)行網(wǎng)格細(xì)化加密,得到升運(yùn)機(jī)構(gòu)模型的節(jié)點(diǎn)數(shù)為887 133,單元數(shù)為480 274,升運(yùn)機(jī)構(gòu)網(wǎng)格劃分如圖6所示。
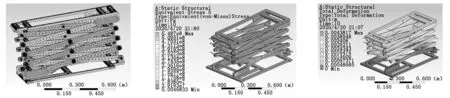
圖6 升運(yùn)機(jī)構(gòu)網(wǎng)格劃分 圖7 升運(yùn)機(jī)構(gòu)等效應(yīng)力云圖 圖8 升運(yùn)機(jī)構(gòu)總變形云圖
3.4 動(dòng)力學(xué)分析結(jié)果
將網(wǎng)格劃分完成后的有限元模型在Mechanical模塊中進(jìn)行動(dòng)力學(xué)分析,施加好各種載荷及約束條件后得到升運(yùn)機(jī)構(gòu)的等效應(yīng)力云圖和機(jī)構(gòu)總變形云圖,如圖7、圖8所示。
3.5 拓?fù)鋬?yōu)化
選擇ANSYS軟件中的Topology Optimization模塊對升運(yùn)機(jī)構(gòu)進(jìn)行拓?fù)鋬?yōu)化,以下將介紹優(yōu)化過程并闡述優(yōu)化結(jié)果。
3.5.1 優(yōu)化過程
通過分析升運(yùn)機(jī)構(gòu)應(yīng)力和變形云圖可知,在下平臺(tái)仍有優(yōu)化空間。將分析中得到的所有數(shù)據(jù)輸入Topology Optimization模塊,如圖9所示。在Topology Optimization模塊中設(shè)置與動(dòng)力學(xué)分析相同的材料屬性、載荷與約束條件,選擇尺寸和重量都較大的上下平臺(tái)作為優(yōu)化對象,以去除25%的材料作為優(yōu)化目標(biāo)進(jìn)行求解[10],如圖10所示。

圖9 Topology Optimization模塊 圖10 拓?fù)鋬?yōu)化對象 圖11 升運(yùn)機(jī)構(gòu)拓?fù)鋬?yōu)化結(jié)果
3.5.2 優(yōu)化結(jié)果
升運(yùn)機(jī)構(gòu)拓?fù)鋬?yōu)化結(jié)果如圖11所示,相較于原來的結(jié)構(gòu),優(yōu)化后的質(zhì)量由93.8 kg減小為70.35 kg,可節(jié)約成本并減少能量損失。
再經(jīng)過光滑處理,最終的升運(yùn)機(jī)構(gòu)三維模型如圖12所示。
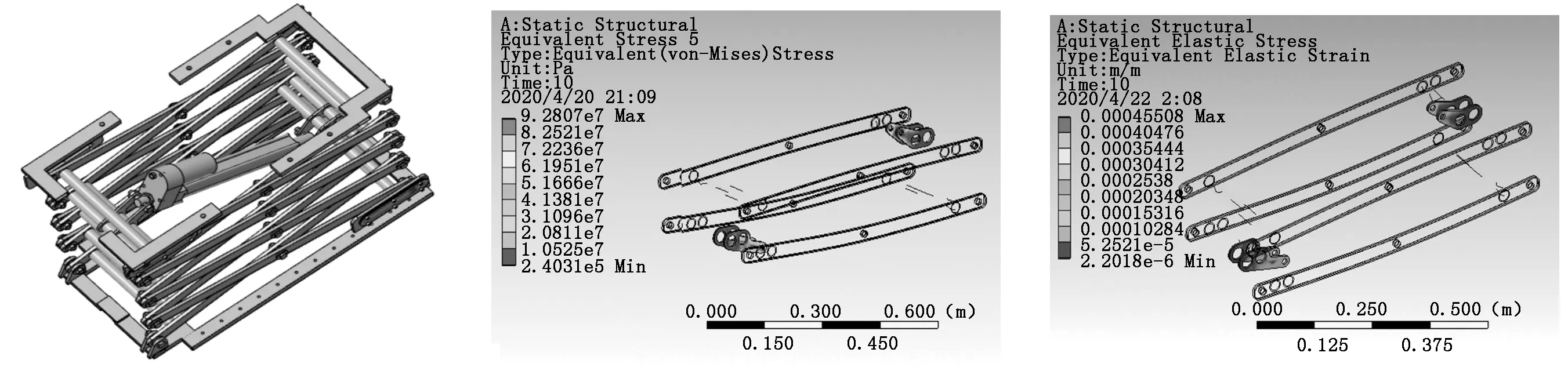
圖12 通過光滑處理后的升運(yùn)機(jī)構(gòu) 圖13 鉸耳的應(yīng)力云圖 圖14 鉸耳的應(yīng)變云圖
3.6 鉸耳的有限元分析
在設(shè)備研發(fā)過程中,每個(gè)零件有特定的裝配關(guān)系,并且通過力和位移的傳遞來滿足整個(gè)裝置的使用要求。所以對于整體進(jìn)行強(qiáng)度校核時(shí),可以僅分析關(guān)鍵零部件的性能指標(biāo),這樣在分析時(shí)就會(huì)避免產(chǎn)生其他不必要的計(jì)算,大大提高了優(yōu)化分析的效率[11,12]。
從圖7可知整個(gè)機(jī)構(gòu)的應(yīng)力較大處為鉸耳及銅套,選擇鉸耳作為主要研究對象進(jìn)行有限元分析,分析結(jié)果如圖13和圖14所示。
從圖13和圖14可知,鉸耳的最大應(yīng)變?yōu)?.000 46,最大應(yīng)力值為92.8 MPa,通過與材料為Q235的機(jī)械性能參數(shù)進(jìn)行對比,遠(yuǎn)小于材料的最大屈服強(qiáng)度,并且尚有大量的強(qiáng)度裕量,故滿足使用要求[13]。
4 結(jié)語
本文對全方位行走AGV貨物搬運(yùn)小車的升運(yùn)機(jī)構(gòu)進(jìn)行分析,從設(shè)計(jì)要求及參數(shù)、推力的求解、推桿的選型、拓?fù)鋬?yōu)化等方面完成設(shè)計(jì)任務(wù)。通過ADAMS軟件對其進(jìn)行運(yùn)動(dòng)學(xué)仿真分析,得出機(jī)構(gòu)節(jié)點(diǎn)的位移、速度、加速度變化規(guī)律,結(jié)果說明該升運(yùn)機(jī)構(gòu)運(yùn)動(dòng)平穩(wěn),動(dòng)態(tài)性能良好。然后對該機(jī)構(gòu)進(jìn)行有限元分析,發(fā)現(xiàn)下平臺(tái)仍需優(yōu)化,進(jìn)而將總裝配分析中得到的所有數(shù)據(jù)串聯(lián)Topology Optimization模塊進(jìn)行拓?fù)鋬?yōu)化,優(yōu)化后質(zhì)量減小為70.35 kg,實(shí)現(xiàn)了輕量化,節(jié)約了成本。又選取形變量較大的鉸耳進(jìn)行有限元分析校核,結(jié)果證明滿足使用要求。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
機(jī)電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18