礦用架線式直流電機(jī)車變頻調(diào)速裝置設(shè)計(jì)
2021-08-20 08:54:06崔紅剛
機(jī)械工程與自動(dòng)化 2021年3期
關(guān)鍵詞:信號(hào)
崔紅剛
(山西凌志達(dá)煤業(yè)公司,山西 長(zhǎng)治 046600)
0 引言
人類對(duì)能源的需求與環(huán)境保護(hù)成為當(dāng)前亟待解決的一組矛盾,因此在煤礦開采過程中,需要對(duì)采煤設(shè)備的能源利用進(jìn)行高效改進(jìn)。礦用電機(jī)車是礦井中常見的運(yùn)輸設(shè)備,一般有架線式和蓄電池式兩種,架線式電機(jī)車的受電弓經(jīng)常出現(xiàn)摩擦火花,引起電壓波動(dòng)等,在煤礦井下特殊工作環(huán)境中十分危險(xiǎn);蓄電池式電機(jī)車具有防爆和隔爆功能,但是存在維修成本高、電機(jī)換相產(chǎn)生火花等缺點(diǎn)。綜上所述,傳統(tǒng)的架線式電機(jī)車和蓄電池式電機(jī)車均不能滿足能源高效利用和安全可靠的要求,因此本文研究一種變頻調(diào)速式礦用架線式電機(jī)車,以提高能源利用率,提高礦井運(yùn)輸系統(tǒng)的安全性和可靠性。
1 直流無(wú)刷電機(jī)控制系統(tǒng)
礦用架線式直流電機(jī)車采用直流無(wú)刷電機(jī)進(jìn)行主拖動(dòng),這是一種基于計(jì)算機(jī)技術(shù)、永磁材料技術(shù)和電力電子技術(shù)的新型電機(jī),由于沒有電刷,避免了機(jī)械換向裝置的火花、噪聲等問題,具有廣闊的應(yīng)用前景。直流無(wú)刷電機(jī)的運(yùn)行原理為:通過對(duì)轉(zhuǎn)子位置的實(shí)時(shí)檢測(cè),判斷當(dāng)前使轉(zhuǎn)子連續(xù)轉(zhuǎn)動(dòng)所需的磁場(chǎng)方向和大小,并控制逆變器發(fā)出的電流波形,產(chǎn)生所需要的氣隙磁場(chǎng),驅(qū)動(dòng)永磁體轉(zhuǎn)動(dòng)。整個(gè)控制系統(tǒng)可以分為無(wú)刷電機(jī)本體、逆變器和轉(zhuǎn)子位置檢測(cè)傳感器三部分,圖1為直流電機(jī)車控制系統(tǒng)框圖。直流無(wú)刷電機(jī)與同步電機(jī)相似,由定子(電樞繞組)、轉(zhuǎn)子、轉(zhuǎn)子位移傳感器等組成,轉(zhuǎn)矩由電樞電流產(chǎn)生的磁場(chǎng)與轉(zhuǎn)子的永磁體相互作用產(chǎn)生。位置傳感器分為有位置和無(wú)位置兩種,其作用是獲取當(dāng)前的轉(zhuǎn)子位置信號(hào),供逆變電路進(jìn)行判斷。
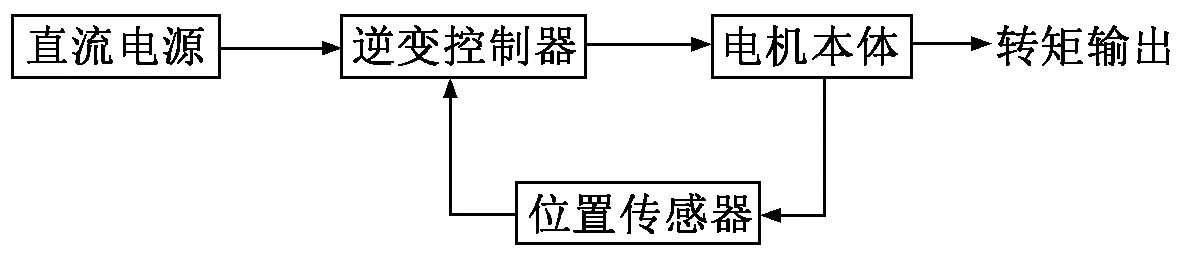
圖1 直流電機(jī)車控制系統(tǒng)框圖
由于直流無(wú)刷電機(jī)構(gòu)造的特殊性,其轉(zhuǎn)子采用永磁材料制造,不同于其他采用電磁激勵(lì)的繞組可以預(yù)測(cè)磁鏈,直流無(wú)刷電機(jī)的磁鏈控制不能預(yù)測(cè)。因此,直流無(wú)刷電機(jī)的運(yùn)行特性主要由定子電流進(jìn)行控制,所以為了電機(jī)運(yùn)行平穩(wěn),定子繞組電流控制是直流電機(jī)車變頻調(diào)速系統(tǒng)的重要依據(jù)。
2 直流電機(jī)車變頻控制系統(tǒng)硬件
直流電機(jī)車變頻控制系統(tǒng)硬件由上位機(jī)、DSP控制板和無(wú)刷直流電機(jī)及其驅(qū)動(dòng)電路三部分組成,如圖2所示。虛線框內(nèi)是以TMS320F2812為核心的控制板,主要功能是接收傳感器采集的電壓電流等數(shù)據(jù),對(duì)核心控制算法進(jìn)行運(yùn)算,發(fā)出電機(jī)控制信號(hào)。虛線框右側(cè)是無(wú)刷直流電機(jī)、功率驅(qū)動(dòng)電路和傳感器電路。上位機(jī)與DSP控制板通過SCI和JTAG接口進(jìn)行通信,上位機(jī)可以向DSP控制板發(fā)出控制信號(hào),接收DSP控制板返回的狀態(tài)信號(hào)。
2.1 速度檢測(cè)電路
由于直流無(wú)刷電機(jī)體積限制,不便采用測(cè)速發(fā)電機(jī)進(jìn)行速度采集,因此大多采用位置傳感器產(chǎn)生正比于轉(zhuǎn)速的脈沖信號(hào),然后對(duì)脈沖信號(hào)進(jìn)行濾波轉(zhuǎn)換成電壓信號(hào),電壓信號(hào)的大小間接反映了轉(zhuǎn)速的大小,速度檢測(cè)電路原理圖如圖3所示。VS是一個(gè)正比于轉(zhuǎn)速的脈沖信號(hào),經(jīng)過單穩(wěn)態(tài)觸發(fā)器處理后,輸出端Q產(chǎn)生一系列等高等寬的脈沖信號(hào),經(jīng)過RC低通濾波為直流電壓信號(hào),輸入到光耦隔離芯片,采用DSP脈沖捕獲單元對(duì)CAP1進(jìn)行捕獲,間接獲取此時(shí)電機(jī)的轉(zhuǎn)速。
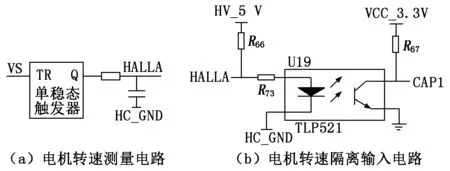
圖3 速度檢測(cè)電路
2.2 放大比較電路
放大比較電路由精密儀表放大器、電壓比較器和上升沿D觸發(fā)器構(gòu)成,不導(dǎo)通相端電壓與給定電壓做差,此差值經(jīng)由放大器進(jìn)行信號(hào)放大后,與零電壓進(jìn)行比較,將比較結(jié)果經(jīng)D觸發(fā)器輸出到光電隔離電路。本設(shè)計(jì)采用精密儀表放大器INA118,這款芯片能夠?qū)ξ⑿⌒盘?hào)進(jìn)行放大,具有高增益寬帶寬的特點(diǎn)。
2.3 電流采樣電路
電流采樣電路采用電阻采樣方式,將串聯(lián)在主回路中的電阻電流經(jīng)運(yùn)算放大電路轉(zhuǎn)換為電壓信號(hào),然后經(jīng)光耦隔離、濾波和限幅等環(huán)節(jié),送入模數(shù)轉(zhuǎn)換器。可采用反饋電容進(jìn)行濾波,在運(yùn)算放大器反饋回路中并聯(lián)102電容,可有效避免電路振蕩,削弱電流采集信號(hào)的尖峰毛刺,提高信噪比。
2.4 不導(dǎo)通相選擇電路
換相前控制系統(tǒng)需要將不導(dǎo)通的一相選擇出來(lái),這個(gè)電路稱之為不導(dǎo)通相選擇電路。不導(dǎo)通相選擇電路由限幅電路、模擬多路開關(guān)和電壓跟隨器組成,限幅電路由3個(gè)共陰極的二極管組成,陰極接限幅電壓+5 V;模擬多路開關(guān)選擇ADG409,其信號(hào)選通接口SEL1、SEL2由DSP IO口控制,多路開關(guān)的輸出端接一級(jí)電壓跟隨器,以增強(qiáng)信號(hào)及減小電路的輸出阻抗。
2.5 功率開關(guān)驅(qū)動(dòng)電路
功率開關(guān)驅(qū)動(dòng)電路是連接DSP控制信號(hào)和逆變器的電路,包括緩沖電路、隔離電路和MOS管驅(qū)動(dòng)電路。緩沖電路和隔離電路的作用是防止逆變器的元件發(fā)生短路等故障時(shí)高壓串入控制電路、燒毀控制板等關(guān)鍵部件。本設(shè)計(jì)采用TLP2630對(duì)DSP的6路PWM信號(hào)進(jìn)行隔離和緩沖。MOS管驅(qū)動(dòng)電路一般采用集成的驅(qū)動(dòng)器,IR公司的IR2130三相全橋驅(qū)動(dòng)器是一款結(jié)構(gòu)簡(jiǎn)單、可靠性高的驅(qū)動(dòng)器,且具有各項(xiàng)保護(hù)功能。
2.6 系統(tǒng)保護(hù)電路
當(dāng)直流無(wú)刷電機(jī)出現(xiàn)各類故障時(shí),如果沒有相應(yīng)的保護(hù)電路,極易造成故障擴(kuò)大,直接造成經(jīng)濟(jì)損失,甚至產(chǎn)生人身傷害。一般電機(jī)運(yùn)行需要配置過電壓、過電流和欠電壓保護(hù),由于驅(qū)動(dòng)器IR2130本身具有性能較好的過電流和欠壓保護(hù)功能,因此本文另外設(shè)計(jì)了一種過壓保護(hù)電路。電壓采集模塊采集母線電壓,通過光耦電路后送入DSP中,與給定的保護(hù)電壓進(jìn)行比較,如果母線電壓大于給定電壓,則在軟件中鎖定PWM脈沖,以此保護(hù)開關(guān)管和電機(jī)。
3 直流電機(jī)車變頻控制系統(tǒng)軟件
直流電機(jī)車變頻控制系統(tǒng)軟件采用模塊化設(shè)計(jì)思想,將整個(gè)軟件劃分為初始化模塊、中斷模塊、雙閉環(huán)控制模塊等。各模塊程序結(jié)合硬件設(shè)計(jì)和中斷服務(wù)子程序進(jìn)行設(shè)計(jì)。圖4為控制系統(tǒng)軟件主程序流程圖,程序開始后,首先進(jìn)行系統(tǒng)初始化,然后關(guān)閉全局中斷,依次對(duì)事件管理器、ADC、外部中斷、變量、定時(shí)器、捕獲模塊進(jìn)行初始化,初始化完成后打開全局中斷,至此初始化工作結(jié)束,進(jìn)入主循環(huán)等待中斷。
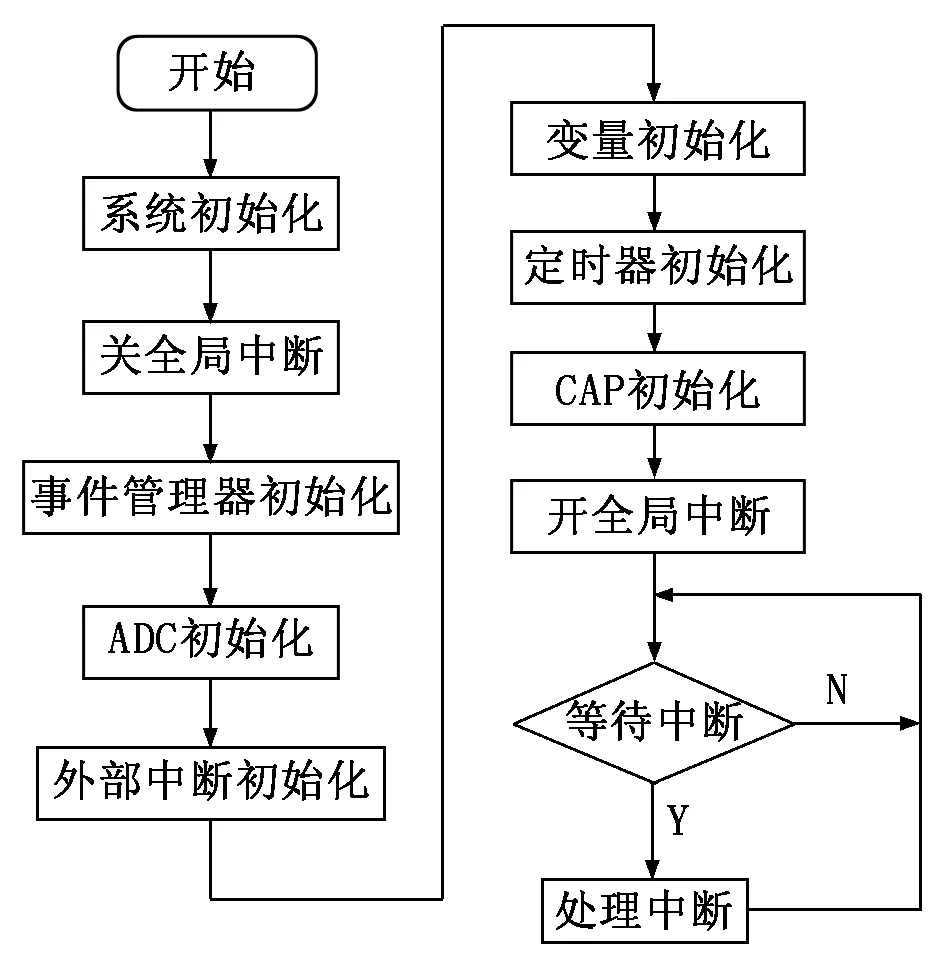
圖4 主程序流程圖
圖5(a)為定時(shí)器中斷流程圖,定時(shí)器中斷開始后,進(jìn)行現(xiàn)場(chǎng)保護(hù),然后讀取啟動(dòng)時(shí)間表中計(jì)數(shù)值,計(jì)算轉(zhuǎn)子位置和轉(zhuǎn)速,計(jì)算完成后執(zhí)行雙閉環(huán)控制算法,調(diào)整PWM控制信號(hào)。定時(shí)中斷子程序能夠完成無(wú)刷直流電機(jī)的啟動(dòng)功能和延時(shí)換相功能。圖5(b)為捕獲中斷流程圖,無(wú)位置傳感器響應(yīng)捕獲中斷,進(jìn)入捕獲中斷后保護(hù)現(xiàn)場(chǎng),然后檢測(cè)換相標(biāo)志,從捕獲寄存器中讀取當(dāng)前狀態(tài),兩次反電動(dòng)勢(shì)過零的中點(diǎn)即為30°電角度時(shí)間,進(jìn)行30°電角度延時(shí)后換相,換相完成后恢復(fù)捕獲功能。

圖5 中斷流程圖
4 結(jié)束語(yǔ)
以DSP為核心的直流無(wú)刷變頻調(diào)速系統(tǒng)具有控制精度高、功耗低等特點(diǎn),與以往采用單片機(jī)的控制系統(tǒng)相比,高速捕獲單元、脈寬調(diào)制模塊等功能大大提高了控制系統(tǒng)的性能。將變頻控制系統(tǒng)和無(wú)刷直流電機(jī)應(yīng)用于礦用架線式電機(jī)車,能夠提高礦井用電機(jī)車的穩(wěn)定性和安全性,并且降低電能損耗,對(duì)煤礦企業(yè)的節(jié)能減排、安全生產(chǎn)具有現(xiàn)實(shí)意義。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國(guó)病理生理雜志(2015年8期)2015-12-21 12:38:06